JP4085372B2 - レゾルバ用信号ケーブル - Google Patents
レゾルバ用信号ケーブル Download PDFInfo
- Publication number
- JP4085372B2 JP4085372B2 JP2003007018A JP2003007018A JP4085372B2 JP 4085372 B2 JP4085372 B2 JP 4085372B2 JP 2003007018 A JP2003007018 A JP 2003007018A JP 2003007018 A JP2003007018 A JP 2003007018A JP 4085372 B2 JP4085372 B2 JP 4085372B2
- Authority
- JP
- Japan
- Prior art keywords
- phase
- resolver
- signal
- signal lines
- cable
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Lifetime
Links
Images








Landscapes
- Transmission And Conversion Of Sensor Element Output (AREA)
Description
【発明の属する技術分野】
本発明はモータ等の回転角度位置を検出するために用いられるレゾルバ信号を伝達するためのケーブルの配線構造に関する。
【0002】
【従来の技術】
ダイレクトドライブモータ等の回転角度位置を検出するための装置として、レゾルバ装置が用いられている。レゾルバ装置は、ロータ鉄心とステータ歯間の空隙中のリラクタンスがロータ鉄心位置により変化することを利用したものであり、1相励磁3相出力タイプのものでは、ステータポールに巻回された巻線に励磁信号を供給すると、位相が120°づつずれた1サイクルの交流信号A相、B相及びC相が検出される。従来のダイレクトドライブモータシステムでは、レゾルバに励磁信号を供給するとともに、レゾルバ信号を得るためのレゾルバ用信号ケーブルがドライブユニットとダイレクトドライブモータ間を結線していた。アナログ信号の伝送に使用されるレゾルバ用信号ケーブルは、その選定にあたって、線径が太いものの他に、ケーブル内の線間静電容量が小さいものが好ましい。
【0003】
【発明が解決しようとする課題】
しかし、従来のレゾルバ用信号ケーブルでは、図9乃至図11に示すように、励磁信号線と各相検出信号線間の配置、及び各相検出信号線間の配置について、何らの配慮もなく結線されていたため、励磁信号線と各相検出信号線間の静電容量、及び各相検出信号線間の静電容量に不平衡が生じていた。図9は1相励磁3相出力のレゾルバ用信号ケーブルの断面図であり、50はレゾルバ用信号ケーブル、51はA相検出信号線、52はB相検出信号線、53はC相検出信号線、54はドライブユニットからレゾルバ装置へ励磁信号を供給するための励磁信号線(共通信号線)である。この形態のレゾルバ用信号ケーブルでは、励磁信号線54とA相検出信号線51、B相検出信号線52、C相検出信号線53間の静電容量を各々CA,CB,CCとすれば、CA=CB≠CCとなり、不平衡である。さらに、A相検出信号線51とB相検出信号線52間の静電容量をCAB、B相検出信号線52とC相検出信号線53間の静電容量をCBC、C相検出信号線53とA相検出信号線51間の静電容量をCCAとすれば、CAB=CBC≠CCAとなり、不平衡である。この不平衡はケーブルの長さが変更されたときなどには、各相の検出信号線にも影響が生じ、レゾルバ用信号ケーブルの絶対精度に誤差を生じる原因となっている。
【0004】
図10は1相励磁で2種類の3相出力を得るレゾルバ用信号ケーブルの断面図であり、60はレゾルバ用信号ケーブル、61〜63は各々第1のA相、B相、及びC相の検出信号線、64〜66は第2のA相、B相、及びC相の検出信号線である。67は励磁信号線(共通信号線)である。この形態のレゾルバ用信号ケーブルでは、励磁信号線67と第1のA相、B相、及びC相の検出信号線61〜63との間の静電容量を各々C1A,C1B,C1Cとし、励磁信号線67と第2のA相、B相、及びC相の検出信号線64〜66との間の静電容量を各々C2A,C2B,C2Cとすれば、C1A≠C1B≠C1CかつC2A≠C2B≠C2Cとなり、不平衡である。また、各相の検出信号線相互間においても、第1のA相及びB相間、第1のB相及びC相間、第1のC相及びA相間の検出信号線間の静電容量を各々C1AB,C1BC,C1CAとし、第2のA相及びB相間、第2のB相及びC相間、第2のC相及びA相間の検出信号線間の静電容量を各々C2AB,C2BC,C2CAとすれば、C1 AB=C1BC≠C1CAかつC2AB=C2BC≠C2CAとなり、不平衡である。
【0005】
図11は1相励磁で2種類の3相出力を得るレゾルバ用信号ケーブルの他の構造の断面図であり、70はレゾルバ用信号ケーブル、71〜73は各々第1のA相、B相、及びC相の検出信号線、74〜76は第2のA相、B相、及びC相の検出信号線である。77は励磁信号線(共通信号線)である。この形態のレゾルバ用信号ケーブルでは、励磁信号線77と第1のA相、B相、及びC相の検出信号線71〜73との間の静電容量を各々C1A,C1B,C1Cとし、励磁信号線77と第2のA相、B相、及びC相の検出信号線74〜76との間の静電容量を各々C2A,C2B,C2Cとすれば、C1A=C1B=C1CかつC2A=C2B=C2Cとなり、バランスのとれた配置となっているが、第1のA相及びB相間、第1のB相及びC相間、第1のC相及びA相間の検出信号線間の静電容量を各々C1AB,C1BC,C1CAとし、第2のA相及びB相間、第2のB相及びC相間、第2のC相及びA相間の検出信号線間の静電容量を各々C2AB,C2BC,C2CAとすれば、C1AB=C1BC≠C1CAかつC2AB=C2BC≠C2CAとなり、不平衡である。
【0006】
上記のように、レゾルバ用信号ケーブル内の励磁信号線及び各相の検出信号線相互間の静電容量が不均衡であると、ケーブルの長さを自由自在に変更したい場合や、極長にしたい場合には、静電容量の不均衡に起因して、各信号線間に電気的な干渉が生じ、レゾルバの測定誤差の原因となり、従来のように単に線間静電容量の小さいケーブルの選定だけでは機能を満足できない場合が生じていた。特に、レゾルバ用信号ケーブルを流れる信号は微少なアナログ電流であるため、ケーブル長の長短に影響されて、レゾルバの精度を劣化させ易い。
【0007】
そこで、本発明は上記問題点を解決し、レゾルバ用信号ケーブル内の励磁信号線と各相の検出信号線間の静電容量、及び各相の検出信号線間の静電容量のバランスを確保することにより、レゾルバ用信号ケーブルの性能向上を図ることを課題とする。
【0008】
【課題を解決するための手段】
上記の課題を解決するため、本発明のレゾルバ用信号ケーブルは、レゾルバ装置へ励磁信号を供給するための少なくとも1以上の励磁信号線、及びレゾルバ装置から出力される多相レゾルバ信号を伝送するための複数の検出信号線を含む多芯構造のレゾルバ信号用ケーブルにおいて、前記複数の検出信号線の各々と励磁信号線間の静電容量の平均値が概略等しく、かつ、隣り合う相の検出信号線の各々の静電容量の平均値が概略等しくなるように、前記励磁信号線及び検出信号線が配されてなる。かかる構成により、励磁信号線と検出信号線の不平衡、及び多相検出信号線間の不平衡を解消することができ、ケーブル長の変更や極長の使用において、信号の性能が左右されないレゾルバ用信号ケーブルを提供することができる。また、ケーブル内の各信号線の配置まで考慮することにより、ケーブル長の長短や個体差による影響を極力低減することができる。
【0009】
【発明の実施の形態】
発明の実施の形態1.
図1は1相励磁3相出力のレゾルバ用信号ケーブルの断面構造図である。同図において、10はレゾルバ用信号ケーブル、11,12,及び13は各々A相、B相、及びC相の検出信号線、14は励磁信号線(共通信号線)であり、4芯構造を成している。各信号線は軸方向に撚れており、どの断面においても正確に同図に示す断面構造となっているわけではないが、平均化すると各信号線の配置は同図に示す位置関係を保っている。各相の信号線11,12,及び13は各々正三角形の頂点に位置し、励磁信号線14は当該正三角形の重心に位置している。このため、信号線11と信号線12の距離、信号線12と信号線13の距離、信号線13と信号線11の距離は等しく、さらに、各信号線11,12,及び13と励磁信号線14との距離も等しい。このため、各信号線11,12,及び13と励磁信号線14間の静電容量をCA,CB,CCとし、信号線11と信号線12間の静電容量をCAB、信号線12と信号線13間の静電容量をCBC、信号線13と信号線11間の静電容量をCCAとすれば、CA=CB=CCかつCAB=CBC=CCAとなり、各相の検出信号線と励磁信号線間の静電容量、及び各相の検出信号線間の静電容量のバランスを確保することができる。
【0010】
図5はレゾルバ用信号ケーブル10を中心とするダイレクトドライブモータシステムの概略構成図である。同図において、80はレゾルバ信号に基づいて位置検出を行うドライブユニット、90はレゾルバ装置を含むモータ部である。励磁信号電源81から出力される励磁信号は励磁信号線14を伝達してレゾルバ装置の巻線91に供給される。各相の巻線91からは検出信号線11,12,13を介してレゾルバ信号が出力され、センス抵抗R1,R2,R3を介して検出される。
【0011】
本実施形態によれば、▲1▼ケーブル長が自在に選択でき、かつ使用する信号の保証範囲を広げることができる、▲2▼極長のケーブル長選択が可能となる、▲3▼生産向上の現場において、信号線の検査に製品と同等品ケーブルを使用する必要がなくなる、▲4▼線間の静電容量がより小さいものを選定しなくてよい、▲5▼出荷検査時に使用したケーブルをセットにして管理する必要がない、といったメリットがあり、本実施形態のレゾルバ用信号ケーブルをダイレクトドライブモータシステムに採用することで、位置決め精度の向上と安定、低振動化、低騒音化の面で格段の向上を図ることができる。本実施形態のレゾルバ用信号ケーブルは、例えば、相対位置検出用レゾルバを備えたダイレクトドライブモータのレゾルバ用信号ケーブルとして使用できる。また、本実施形態のレゾルバ用信号ケーブル2本を1組として、相対位置検出用レゾルバ及び絶対位置検出用レゾルバの双方を備えたモータに適用し、相対位置検出用レゾルバ及び絶対位置検出用レゾルバのレゾルバ信号用ケーブルとして使用できる。
【0012】
尚、本実施形態は、励磁信号線と検出信号線の不平衡、及び多相検出信号線間の不平衡を解消することのできる配置であれば、芯数、レゾルバ信号の相数等に制限されるものではなく、また、ツイストペア線、ツイストシールド線等にも適用できる。以下に説明する各実施形態においても同様である。
【0013】
発明の実施の形態2.
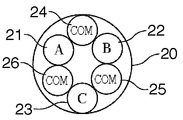
図2は3相励磁3相出力のレゾルバ用信号ケーブルの断面構造図である。同図において、20はレゾルバ用信号ケーブル、21,22,及び23は各々A相、B相、及びC相の検出信号線、24,25,及び26は各々A相、B相、及びC相の励磁信号線(共通信号線)であり、6芯構造を成している。各信号線は軸方向に撚れており、どの断面においても正確に同図に示す断面構造となっているわけではないが、平均化すると各信号線の配置は同図に示す位置関係を保っている。各相の信号線21,22,及び23は第1の正三角形の各頂点に位置し、励磁信号線24,25,及び26は第2の正三角形の各頂点に位置する。第1の正三角形と第2の正三角形は同形同大であり、その重心は各々レゾルバ用信号ケーブル20の中心点に一致し、かつ当該中心点において点対称となっている。図形の対称性から、信号線21と24の距離、信号線22と25の距離、信号線23と26の距離は各々等しく、また、信号線21と22の距離、信号線22と23の距離、信号線23と21の距離は各々等しい。このため、信号線21と24間の静電容量をCA、信号線22と25間の静電容量をCB、信号線23と26間の静電容量をCCとし、信号線21と信号線22間の静電容量をCAB、信号線22と信号線23間の静電容量をCBC、信号線23と信号線21間の静電容量をCCAとすれば、CA=CB=CCかつCAB=CBC=CCAとなり、各相の検出信号線と励磁信号線間の静電容量、及び各相の検出信号線間の静電容量のバランスを確保することができる。
【0014】
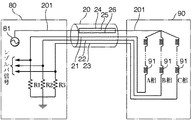
図6はレゾルバ用信号ケーブル20を中心とするダイレクトドライブモータシステムの概略構成図である。同図において、80はレゾルバ信号に基づいて位置検出を行うドライブユニット、90はレゾルバ装置を含むモータ部である。励磁信号線201はドライブユニット80内において一本に収束しており、3本の励磁信号線24,25,26に分岐した状態でレゾルバ信号用ケーブル20内に配線され、モータ部90内において再び一本に収束している。このように、励磁信号線201を3本に分けることで、レゾルバ用信号ケーブル20の作成が容易となる。図1に示されているように、上述の実施形態1の構成では検出信号線間の距離が大きくなるため、隣接する検出信号線間の距離を略等間隔にして撚り線を形成することが困難となるが、本実施形態によれば、近接した位置に励磁信号線と検出信号線を配置できるため、撚り線の形成が容易となる。励磁信号電源81から出力される励磁信号は励磁信号線201を伝達してレゾルバ装置の巻線91に供給される。各相の巻線91からは検出信号線21,22,23を介してレゾルバ信号が出力され、センス抵抗R1,R2,R3を介して検出される。
【0015】
本実施形態によれば、上記▲1▼〜▲5▼のメリットがあり、本実施形態のレゾルバ用信号ケーブルをダイレクトドライブモータシステムに採用することで、位置決め精度の向上と安定、低振動化、低騒音化の面で格段の向上を図ることができる。本実施形態のレゾルバ用信号ケーブルは、例えば、相対位置検出用レゾルバを備えたダイレクトドライブモータのレゾルバ用信号ケーブルとして使用できる。また、本実施形態のレゾルバ用信号ケーブル2本を1組として、相対位置検出用レゾルバ及び絶対位置検出用レゾルバの双方を備えたモータに適用し、相対位置検出用レゾルバ及び絶対位置検出用レゾルバのレゾルバ信号用ケーブルとして使用できる。
【0016】
発明の実施の形態3.
図3は1相励磁3相出力のレゾルバ用信号ケーブルの断面構造図である。本実施形態では、レゾルバ信号は2種類の3相出力となっており、30はレゾルバ用信号ケーブル、31,32,及び33は各々第1のA相、B相、及びC相の検出信号線、34,35,及び36は各々第2のA相、B相、及びC相の検出信号線、37は励磁信号線(共通信号線)であり、7芯構造を成している。レゾルバ用信号ケーブル30は相対位置検出用レゾルバ及び絶対位置検出用レゾルバの双方を備えたモータ1台、或いは相対位置検出用レゾルバ及び絶対位置検出用レゾルバの何れか一方を備えたモータ2台への接続用に用いることができる。
【0017】
各信号線は軸方向に撚れており、どの断面においても正確に同図に示す断面構造となっているわけではないが、平均化すると各信号線の配置は同図に示す位置関係を保っている。第1のA相、B相、及びC相の検出信号線31,32,及び33は第1の正三角形の各頂点に位置し、第2のA相、B相、及びC相の検出信号線34,35,及び36は第2の正三角形の各頂点に位置している。第1の正三角形と第2の正三角形は同形同大であり、その重心は各々レゾルバ用信号ケーブル30の中心点に一致し、かつ当該中心点において点対称となっている。また、レゾルバ用信号ケーブル30の中心点は励磁信号線37の中心点に一致する。図形の対称性から、信号線31〜36の各々と励磁信号線37との距離は等しく、また、信号線31と32の距離、信号線32と33の距離、信号線33と31の距離、信号線34と35の距離、信号線35と36の距離、信号線36と34の距離は全て等しい。
【0018】
このため、信号線31と37間の静電容量をC1A、信号線32と37間の静電容量をC1B、信号線33と37間の静電容量をC1C、信号線34と37間の静電容量をC2A、信号線35と37間の静電容量をC2B、信号線36と37間の静電容量をC2C、信号線31と32間の静電容量をC1A1B、信号線32と33間の静電容量をC1B1C、信号線33と31間の静電容量をC1C1A、信号線34と35間の静電容量をC2A2B、信号線35と36間の静電容量をC2B2C、信号線36と34間の静電容量をC2C2Aとすれば、C1A=C1B=C1C=C2A=C2B=C2CかつC1A1B=C1B1C=C1C1A=C2A2B=C2B2C=C2C2Aとなる。
【0019】
図7はレゾルバ用信号ケーブル30を中心とするダイレクトドライブモータシステムの概略構成図である。同図において、80はレゾルバ信号に基づいて位置検出を行うドライブユニット、90はレゾルバ装置を含むモータ部である。励磁信号電源81から出力される励磁信号は励磁信号線37を伝達してレゾルバ装置の巻線91に供給される。各相の巻線91からは検出信号線31〜36を介してレゾルバ信号が出力され、センス抵抗R1〜R6を介して検出される。
【0020】
本実施形態によれば、上記▲1▼〜▲5▼のメリットがあり、本実施形態のレゾルバ用信号ケーブルをダイレクトドライブモータシステムに採用することで、位置決め精度の向上と安定、低振動化、低騒音化の面で格段の向上を図ることができる。
【0021】
発明の実施の形態4.
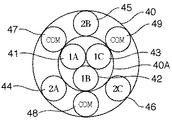
図4は1相励磁3相出力のレゾルバ用信号ケーブルの断面構造図である。本実施形態では、レゾルバ信号は2種類の3相出力となっており、40はレゾルバ用信号ケーブル、41,42,及び43は各々第1のA相、B相、及びC相の検出信号線、44,45,及び46は各々第2のA相、B相、及びC相の検出信号線、47,48,及び49は励磁信号線(共通信号線)であり、9芯構造を成している。レゾルバ用信号ケーブル40は相対位置検出用レゾルバ及び絶対位置検出用レゾルバの双方を備えたモータ1台、或いは相対位置検出用レゾルバ及び絶対位置検出用レゾルバの何れか一方を備えたモータ2台への接続用に用いることができる。
【0022】
各信号線は軸方向に撚れており、撚りのピッチ或いは撚りの方向を外側の6本(符号44〜49)と内側の3本(符号41〜43)とで異なるようにしている。このことにより、どの断面においても正確に同図に示す断面構造となっているわけではないが、平均化すると各信号線の配置は同図に示す位置関係を保っている。励磁信号線を3本に分けて図4のように構成したことにより、実施形態3の効果に加えて、2組の検出線同士のクロストークの発生を抑制できる効果が得られる。このような効果を得るべく、励磁信号線を3本に分けるのは、ケーブル部分のみで十分なため、ドライバ装置とモータ部の内部では励磁信号線は1本に収束されている。
【0023】
第1のA相、B相、及びC相の検出信号線41,42,及び43は第1の正三角形の各頂点に位置し、第2のA相、B相、及びC相の検出信号線44,45,及び46は第2の正三角形の各頂点に位置している。また、励磁信号線47,48,及び49は第3の正三角形の各頂点に位置している。第1、第2及び第3の正三角形の各々の重心はレゾルバ用信号ケーブル40の中心点に一致し、第2の正三角形と第3の正三角形は同形同大で前記中心点に関して点対称である。また、検出信号線41,42,及び43は内円40Aに内接し、検出信号線44,45,及び46、励磁信号線47,48,及び49は内円40Aに外接している。図形の対称性から、信号線41と47の距離、信号線42と48の距離、信号線43と49の距離は等しく、信号線47と44の距離、信号線49と45の距離、信号線48と46の距離も等しい。また、信号線41と42の距離、信号線42と43の距離、信号線43と41の距離も等しく、信号線44と45、信号線45と46、信号線46と44の距離も等しい。
【0024】
このため、信号線47と41間の静電容量をC1A、信号線48と42間の静電容量をC1B、信号線49と43間の静電容量をC1C、信号線47と44間の静電容量をC2A、信号線49と45間の静電容量をC2B、信号線48と46間の静電容量をC2C、信号線41と42間の静電容量をC1A1B、信号線42と43間の静電容量をC1B1C、信号線43と41間の静電容量をC1C1A、信号線44と45間の静電容量をC2A2B、信号線45と46間の静電容量をC2B2C、信号線46と44間の静電容量をC2C2Aとすれば、C1A=C1B=C1CかつC2A=C2B=C2CかつC1A1B=C1B1C=C1C1AかつC2A2B=C2B2C=C2C2Aとなる。
【0025】
図8はレゾルバ用信号ケーブル40を中心とするダイレクトドライブモータシステムの概略構成図である。同図において、80はレゾルバ信号に基づいて位置検出を行うドライブユニット、90はレゾルバ装置を含むモータ部である。励磁信号線401はドライブユニット80内において一本に収束しており、3本の励磁信号線47,48,49に分岐した状態でレゾルバ信号用ケーブル40内に配線され、モータ部90内において再び一本に収束している。励磁信号電源81から出力される励磁信号は励磁信号線401を伝達してレゾルバ装置の巻線91に供給される。各相の巻線91からは検出信号線41〜46を介してレゾルバ信号が出力され、センス抵抗R1〜R6を介して検出される。
【0026】
本実施形態によれば、上記▲1▼〜▲5▼のメリットがあり、本実施形態のレゾルバ用信号ケーブルをダイレクトドライブモータシステムに採用することで、位置決め精度の向上と安定、低振動化、低騒音化の面で格段の向上を図ることができる。
【0027】
【発明の効果】
本発明によれば、励磁信号線と検出信号線間の静電容量の不平衡、及び多相検出信号線間の静電容量の不平衡を解消し、ケーブル長の変更や極長の使用において、信号の性能が左右されないレゾルバ用信号ケーブルを提供することができる。
【図面の簡単な説明】
【図1】第1の実施形態に係わるレゾルバ用信号ケーブルの断面構造図である。
【図2】第2の実施形態に係わるレゾルバ用信号ケーブルの断面構造図である。
【図3】第3の実施形態に係わるレゾルバ用信号ケーブルの断面構造図である。
【図4】第4の実施形態に係わるレゾルバ用信号ケーブルの断面構造図である。
【図5】第1の実施形態に係わるダイレクトドライブモータシステムの概略構成図である。
【図6】第2の実施形態に係わるダイレクトドライブモータシステムの概略構成図である。
【図7】第3の実施形態に係わるダイレクトドライブモータシステムの概略構成図である。
【図8】第4の実施形態に係わるダイレクトドライブモータシステムの概略構成図である。
【図9】第1の従来例におけるレゾルバ用信号ケーブルの断面構造図である。
【図10】第2の従来例におけるレゾルバ用信号ケーブルの断面構造図である。
【図11】第3の従来例におけるレゾルバ用信号ケーブルの断面構造図である。
【符号の説明】
10,20,30,40,50,60,70…レゾルバ用信号ケーブル
11,21,31,34,41,44…A相検出信号線
12,22,32,35,42,45…B相検出信号線
13,23,33,36,43,46…C相検出信号線
14,24,25,26,37,47,48,49…励磁信号線
Claims (1)
- レゾルバ装置へ励磁信号を供給するための少なくとも1以上の励磁信号線、及び前記レゾルバ装置から出力される多相レゾルバ信号を伝送するための複数の検出信号線を配してなる多芯構造のレゾルバ信号用ケーブルにおいて、
前記複数の検出信号線の各々と励磁信号線間の静電容量の平均値が概略等しく、かつ、隣り合う相の検出信号線間の静電容量の平均値が概略等しくなるように、前記励磁信号線及び検出信号線を配した、レゾルバ用信号ケーブル。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003007018A JP4085372B2 (ja) | 2002-01-15 | 2003-01-15 | レゾルバ用信号ケーブル |
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002006411 | 2002-01-15 | ||
| JP2002-6411 | 2002-01-15 | ||
| JP2003007018A JP4085372B2 (ja) | 2002-01-15 | 2003-01-15 | レゾルバ用信号ケーブル |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2003279377A JP2003279377A (ja) | 2003-10-02 |
| JP4085372B2 true JP4085372B2 (ja) | 2008-05-14 |
Family
ID=29252885
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2003007018A Expired - Lifetime JP4085372B2 (ja) | 2002-01-15 | 2003-01-15 | レゾルバ用信号ケーブル |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4085372B2 (ja) |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4631585B2 (ja) * | 2004-11-12 | 2011-02-16 | 三菱電機株式会社 | インバータシステム |
| CN100440722C (zh) * | 2004-11-12 | 2008-12-03 | 三菱电机株式会社 | 变换器系统、交流旋转机、电力变换器 |
| JP2006311697A (ja) * | 2005-04-28 | 2006-11-09 | Hitachi Ltd | ブラシレスモータシステム |
| JP4971642B2 (ja) * | 2006-02-02 | 2012-07-11 | 株式会社一宮電機 | ブラシレスモータ |
| JP5621538B2 (ja) * | 2010-11-18 | 2014-11-12 | 日本精工株式会社 | レゾルバ用シールドケーブル及びレゾルバ |
-
2003
- 2003-01-15 JP JP2003007018A patent/JP4085372B2/ja not_active Expired - Lifetime
Also Published As
| Publication number | Publication date |
|---|---|
| JP2003279377A (ja) | 2003-10-02 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6844614B2 (ja) | モータ | |
| JP6058146B2 (ja) | 回転電機 | |
| JP6026364B2 (ja) | 回転電機 | |
| CN107076576B (zh) | 旋转角度检测装置、旋转电机和电梯用曳引机 | |
| JP2017118671A (ja) | 回転電機 | |
| CN107408855A (zh) | 旋转电机 | |
| JP4085372B2 (ja) | レゾルバ用信号ケーブル | |
| US6856061B2 (en) | Synchronous resolver, resolver cable and direct drive motor system | |
| JP5518363B2 (ja) | 回転角度検出装置 | |
| JP2018185221A (ja) | 高精度分割型回転角度検出装置 | |
| JP3972355B2 (ja) | ダイレクトドライブモータシステム | |
| JP4557591B2 (ja) | 角度位置検出装置 | |
| JP4362129B2 (ja) | レゾルバ | |
| JP2018110498A (ja) | 回転型差動変圧器 | |
| JP6393229B2 (ja) | ステータおよびレゾルバ | |
| JP4065267B2 (ja) | コンデンサ電動機の固定子およびその製造方法 | |
| CN115037079A (zh) | 马达 | |
| JPH0528936Y2 (ja) | ||
| JP2012173094A (ja) | レゾルバ | |
| JP2005321248A (ja) | 多重レゾルバ装置 | |
| JP2804987B2 (ja) | 複速回転検出器 | |
| JP7078002B2 (ja) | モータ、およびインバータ装置 | |
| JP4971642B2 (ja) | ブラシレスモータ | |
| JP4709561B2 (ja) | 冗長系レゾルバ | |
| JP2013118774A (ja) | レゾルバ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20051227 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20080123 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20080125 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20080207 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110228 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4085372 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120229 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130228 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130228 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140228 Year of fee payment: 6 |
|
| EXPY | Cancellation because of completion of term |