JP4094543B2 - カプセル型医療装置システム - Google Patents
カプセル型医療装置システム Download PDFInfo
- Publication number
- JP4094543B2 JP4094543B2 JP2003432674A JP2003432674A JP4094543B2 JP 4094543 B2 JP4094543 B2 JP 4094543B2 JP 2003432674 A JP2003432674 A JP 2003432674A JP 2003432674 A JP2003432674 A JP 2003432674A JP 4094543 B2 JP4094543 B2 JP 4094543B2
- Authority
- JP
- Japan
- Prior art keywords
- medical device
- capsule medical
- device system
- capsule
- electrode
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 239000002775 capsule Substances 0.000 title claims description 230
- 238000001514 detection method Methods 0.000 claims description 77
- 230000005540 biological transmission Effects 0.000 claims description 31
- 230000001133 acceleration Effects 0.000 claims description 30
- 238000003384 imaging method Methods 0.000 claims description 23
- 230000033001 locomotion Effects 0.000 claims description 16
- 230000002572 peristaltic effect Effects 0.000 claims description 9
- 230000000638 stimulation Effects 0.000 description 53
- 210000000813 small intestine Anatomy 0.000 description 38
- 210000001519 tissue Anatomy 0.000 description 32
- 210000002429 large intestine Anatomy 0.000 description 25
- 210000002784 stomach Anatomy 0.000 description 18
- 210000000436 anus Anatomy 0.000 description 16
- 230000008602 contraction Effects 0.000 description 11
- 210000004534 cecum Anatomy 0.000 description 9
- 230000006870 function Effects 0.000 description 8
- 230000007246 mechanism Effects 0.000 description 7
- 238000001727 in vivo Methods 0.000 description 6
- 238000000034 method Methods 0.000 description 5
- 230000004044 response Effects 0.000 description 5
- 230000008859 change Effects 0.000 description 4
- 230000001276 controlling effect Effects 0.000 description 4
- 239000012530 fluid Substances 0.000 description 3
- 210000001035 gastrointestinal tract Anatomy 0.000 description 3
- 230000036541 health Effects 0.000 description 3
- 238000007689 inspection Methods 0.000 description 3
- 230000003287 optical effect Effects 0.000 description 3
- 230000001105 regulatory effect Effects 0.000 description 3
- 238000004891 communication Methods 0.000 description 2
- 230000029142 excretion Effects 0.000 description 2
- 230000000968 intestinal effect Effects 0.000 description 2
- 230000005389 magnetism Effects 0.000 description 2
- 210000004400 mucous membrane Anatomy 0.000 description 2
- 125000002066 L-histidyl group Chemical group [H]N1C([H])=NC(C([H])([H])[C@](C(=O)[*])([H])N([H])[H])=C1[H] 0.000 description 1
- 230000002378 acidificating effect Effects 0.000 description 1
- 229910052782 aluminium Inorganic materials 0.000 description 1
- XAGFODPZIPBFFR-UHFFFAOYSA-N aluminium Chemical compound [Al] XAGFODPZIPBFFR-UHFFFAOYSA-N 0.000 description 1
- 239000004020 conductor Substances 0.000 description 1
- 230000001595 contractor effect Effects 0.000 description 1
- 238000010586 diagram Methods 0.000 description 1
- 239000013013 elastic material Substances 0.000 description 1
- 238000005286 illumination Methods 0.000 description 1
- 230000006698 induction Effects 0.000 description 1
- 238000009434 installation Methods 0.000 description 1
- 230000001678 irradiating effect Effects 0.000 description 1
- 229910052751 metal Inorganic materials 0.000 description 1
- 239000002184 metal Substances 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 230000007935 neutral effect Effects 0.000 description 1
- 230000009747 swallowing Effects 0.000 description 1
Images














Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/04—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor combined with photographic or television appliances
- A61B1/041—Capsule endoscopes for imaging
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00147—Holding or positioning arrangements
- A61B1/00156—Holding or positioning arrangements using self propulsion
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00147—Holding or positioning arrangements
- A61B1/00158—Holding or positioning arrangements using magnetic field
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/06—Devices, other than using radiation, for detecting or locating foreign bodies ; Determining position of diagnostic devices within or on the body of the patient
- A61B5/061—Determining position of a probe within the body employing means separate from the probe, e.g. sensing internal probe position employing impedance electrodes on the surface of the body
- A61B5/062—Determining position of a probe within the body employing means separate from the probe, e.g. sensing internal probe position employing impedance electrodes on the surface of the body using magnetic field
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/06—Devices, other than using radiation, for detecting or locating foreign bodies ; Determining position of diagnostic devices within or on the body of the patient
- A61B5/065—Determining position of the probe employing exclusively positioning means located on or in the probe, e.g. using position sensors arranged on the probe
- A61B5/067—Determining position of the probe employing exclusively positioning means located on or in the probe, e.g. using position sensors arranged on the probe using accelerometers or gyroscopes
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B2562/00—Details of sensors; Constructional details of sensor housings or probes; Accessories for sensors
- A61B2562/02—Details of sensors specially adapted for in-vivo measurements
- A61B2562/0219—Inertial sensors, e.g. accelerometers, gyroscopes, tilt switches
Landscapes
- Life Sciences & Earth Sciences (AREA)
- Health & Medical Sciences (AREA)
- Surgery (AREA)
- Engineering & Computer Science (AREA)
- Molecular Biology (AREA)
- General Health & Medical Sciences (AREA)
- Pathology (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Medical Informatics (AREA)
- Physics & Mathematics (AREA)
- Veterinary Medicine (AREA)
- Animal Behavior & Ethology (AREA)
- Biophysics (AREA)
- Public Health (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Optics & Photonics (AREA)
- Radiology & Medical Imaging (AREA)
- Human Computer Interaction (AREA)
- Measurement Of The Respiration, Hearing Ability, Form, And Blood Characteristics Of Living Organisms (AREA)
- Endoscopes (AREA)
Description
し、所望する部位を観察することができるカプセル型医療装置システムに関する。
請求項1に係る発明は、生体内に投入可能なカプセル型医療装置を備えたカプセル型医療装置システムにおいて、前記カプセル型医療装置システムが、前記カプセル型医療装置の生体内での位置を検出する位置検出手段と、前記カプセル型医療装置の外表面近傍に設けられ、前記カプセル型医療装置が進退するための力を発生させるために生体組織を収縮させる刺激を与える電極と、前記電極に流す電流を制御する制御手段とを備え、前記位置検出手段にて検出された位置情報に応じて、前記電極に流す電流を前記制御手段が制御するカプセル型医療装置システムを提供する。
このように、生体内の部位に応じて生体組織に電気刺激を与えることができるので、効率の良い観察を行うことができる。また、電力等の無駄な消費を抑え、安定した動作を確保することができる。特に、電気刺激の有効性の低い胃等の部位での無駄な動作をなくすことができる。
請求項9に係る発明は、請求項8に記載のカプセル型医療装置システムにおいて、前記カプセル型医療装置が、前記電極を複数備え、前記制御手段が、前記位置情報に基づいて、前記複数の電極から電流を供給する電極を選択するカプセル型医療装置システムを提供する。
請求項10に係る発明は、請求項9に記載のカプセル型医療装置システムにおいて、前記位置検出手段が、前記位置情報に基づいて、蠕動運動の方向を検出し、前記制御手段が、検出された前記蠕動運動の方向に基づいて、前記電流を供給する電極を選択するカプセル型医療装置システムを提供する。
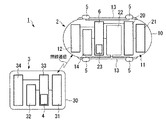
本実施形態のカプセル型医療装置システム1は、図1に示すように、体内(生体内)に投入可能なカプセル型医療装置2と、体外に設置される体外装置3と、体内におけるカプセル型医療装置2の位置を検出する位置検出回路(位置検出手段)4と、カプセル型医療装置2の外表面近傍に設けられ、生体組織に電気刺激を与える電極5と、該電極5に流す電流を制御する制御部(制御手段)6とを備えている。
該制御部6は、無線送受信部12から送られてきた制御信号に基づいて、電流発生回路23から電極5に電流を供給したり、電流発生回路23から電極5に供給されている電流を停止させる機能を有している。また、制御部6は同時に、制御信号に基づいて上記拡張収縮機構22を制御してバルーン13を作動(拡張又は縮小)させる機能を有している。この制御部6の作動については、後に詳細に説明する。なお、制御部6は、上記各構成品を総合的に制御する機能を有している。
上記本体30は、アルミ等の金属やプラスチック等で箱状に形成され、被検者のベルト等を介して身体に装着可能とされており、これにより常に被検者の体外に配される(設置)ようになっている。
上記無線送受信部31は、カプセル型医療装置2の無線送受信部12と同様に、図示しない送受信部本体と電波を発信及び受信する送受信アンテナ(発信アンテナ、受信アンテナ)とから構成されており、カプセル型医療装置2から無線送信されてきた生体情報である撮像画像を受信すると共に上記制御部33に送る機能を有している。
なお、本実施形態においては、制御部33は、カプセル型医療装置2が小腸に達したときには電気刺激を与える制御信号を、大腸に達したときにはバルーン13を拡張させる制御信号を、肛門に達したときには電気刺激を停止すると共にバルーン13を縮小させる制御信号を、それぞれ送るように設定されている。なお、この生体部位に応じた制御信号は、上記設定に限られず、自由に設定することが可能である。
まず、図3に示すように、ベルト等を介して体外装置3を装着した後、被検者は、カプセル型医療装置2を経口投入する。なお、この際、カプセル型医療装置2は、図示しないスイッチが入るようになっており、電池14から各構成品に電力が供給される。これにより、制御部6は、取得手段11、即ち、光学系21及び撮像素子20を作動させる。
体内に投入されたカプセル型医療装置2は、消化管を移動しながら撮像素子20により体内各部を撮像すると共に、撮像画像を無線送受信部12により体外装置3に向けて無線送信する。一方、体外装置3は、無線送受信部31を介して撮像画像を受信すると共に、制御部33により撮像画像の画像処理等を行って随時記録手段32に記録を行う。
なお、本実施形態においては、撮像素子20が進行方向側、即ち、一端側の電極5が進行方向側に位置しているものとする。
一方、医師等は、体外装置3の記録手段32に記録された生体情報である撮像画像に基づいて、被検者の健康状態の診断を行う。
また、位置検出回路4等の複雑な構成を体外装置3に備えることで、カプセル型医療装置2を必要最低限の構成にでき、コンパクト化を図ることができる。
また、撮像画像を生体情報として利用するだけでなく、位置検出回路4の位置検出情報としても利用することができるので、位置検出のための別個の情報を検出するための構成が不要である。従って、構成の容易化を図ることができる。
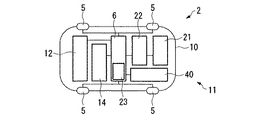
また、カプセル型医療装置2の位置を検出する位置検出手段として、体外装置3の制御部33に位置検出回路4を組み込んで、撮像素子20で取得した生体情報である撮像画像に基づいてカプセル型医療装置2の位置を検出したが、これに限られるものではない。例えば、図6に示すように、カプセル型医療装置2の取得手段11が、生体内のpH値を測定するpHセンサ40を備え、位置検出回路4が、pHセンサ40で測定したpH値に基づいてカプセル型医療装置2の位置を検出するように構成しても構わない。この場合、カプセル型医療装置2の無線送受信部12と体外装置3の無線送受信部31との間で、pH値(情報)を相互通信可能に設定すれば良い。こうすることで、位置検出回路4は、例えば、測定したpH値と予め設定された閾値等とを比較したり、測定したpH値の変化(例えば、胃では酸性であるが、小腸では中性に変化)等に基づいて生体内におけるカプセル型医療装置2の位置検出が行える。特に、第1実施形態の撮像画像による位置検出に比べ、アルゴリズムの容易化を図ることができる。
即ち、図7に示すように、カプセル型医療装置2の無線送受信部12が無線電波を発信可能とされ、位置検出手段45が、体外装置3に設けられて無線電波の電波強度を測定する複数の受信アンテナ46を備え、各受信アンテナ46で受信した電波強度の強弱に基づいてカプセル型医療装置2の位置を検出するように構成しても構わない。なお、この場合には、上記位置検出手段45は、各受信アンテナ46と位置検出回路4とから構成される。また、各受信アンテナ46を特定の部位、例えば、胃、小腸や大腸の近傍に位置するように配すると良い。こうすることで、小腸付近に配された受信アンテナ46が受信する電波強度が最も高い場合には、位置検出回路4はカプセル型医療装置2が小腸に達していることを検出することができる。このように電波強度を利用して確実にカプセル型医療装置2の位置検出を行うことができる。
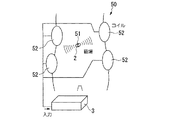
即ち、図8に示すように、位置検出手段50が、カプセル型医療装置2に設けられて磁力を発生させる図示しない磁石やコイル等の磁力発生手段51と、体外装置3に設けられて磁力を測定する複数の磁気センサ、例えば、外部コイル(磁力検出手段)52とを備え、各外部コイル52で測定した磁界強度の強弱に基づいてカプセル型医療装置2の位置を検出するように構成しても構わない。この場合には、各外部コイル52を特定の部位、例えば、胃、小腸や大腸の近傍に位置するように配すると良い。こうすることで、小腸付近に配された外部コイル52が測定する磁界強度が最も高い場合には、カプセル型医療装置2が小腸に達していることを検出することができる。また、位置検出手段50において、磁力発生手段51が、交流磁界を発生させるコイルであっても良い。この場合、交流磁界を用いることで、環境から発信された物理量等による干渉の環境が少ない状態で、磁気センサを用いて位置検出を実現することが可能となる。このように磁界強度を利用して、確実にカプセル型医療装置2の位置検出を行うことができる。
なお、その他、磁力以外にも、電磁波、電波、光、音波等の物理量を用いて同様の位置検出をすることも可能である。
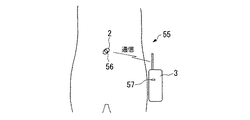
即ち、図9に示すように、位置検出手段55が、カプセル型医療装置2に設けられて体内の加速度を測定すると共に無線送受信部12を介して体内加速度情報を送信する体内加速度センサ56と、体外装置3に設けられて体外の加速度を測定する体外加速度センサ57とを備え、体外装置3の無線送受信部31を介して受信した体内加速度情報と体外加速度センサ57で測定した体外加速度情報とに基づいて、カプセル型医療装置2の位置を検出するように構成しても構わない。
なお、上記位置検出手段55も上記位置検出手段50と同様に、電磁波、電波、光、音波等のその他の物理量を用いて位置検出をすることも可能である。
例えば、図10に示すように、位置検出手段60が、生体外の特定部位近傍に配された複数の磁石61と、カプセル型医療装置2に設けられて磁石61の磁力を検出する図示しない磁気センサとを備え、磁気センサにより検出した磁力に基づいてカプセル型医療装置2の位置を検出するように構成しても構わない。なお、図10においては、磁石61は、特定部位として胃の幽門部、盲腸及び肛門の近傍に配している。こうすることで、カプセル型医療装置2が、胃の幽門部、盲腸及び肛門の近傍に達した際、磁気センサが磁石61の磁力を検出して自己位置を検出することができる。
例えば、小腸に達したときに、一端側又は他端側の電極5より生体組織に一時的に電気刺激を与え、カプセル型医療装置2を移動させる。このときのカプセル型医療装置2の移動方向を検出することで、カプセル型医療装置2の向きの検出がより短時間で行える。その後、向きに応じて一端側又は他端側の電極5から電気刺激を生体組織に与えれば良い。
例えば、図13に示すように、カプセル型医療装置2の内部に永久磁石65を設けると共に、特定部位、例えば、小腸近傍に永久磁石66を配する。こうすることで、胃を通過して小腸に移動する際に、カプセル型医療装置2の永久磁石65と小腸近傍に配された永久磁石66とにより、カプセル型医療装置2の向きが一定方向に規制された状態で小腸に移動する。また、カプセル型医療装置2に設けられた永久磁石65、又は特定部位に設けられた永久磁石66に替えて、コイルを採用しても構わない。こうすることで、必要時以外に磁力を発生させないようにでき、例えば、前述の磁気を利用した位置検出手段への干渉及び影響を最少限に抑えることができる。従って、確実に一定方向に向けて進行させることができ、電気刺激手段の制御を行い易い。
また、上述のような磁気による向き制御機能(磁気誘導手段)を常時併用し、観察時の向き制御に利用しても良い。これにより、観察性能が向上する。
第2実施形態と第1実施形態との異なる点は、第1実施形態では、カプセル型医療装置を経口投入して排泄されるまで体内各部を観察したが、第2実施形態では、カプセル型医療装置2を経肛門で投入し、大腸内の観察を行う点である。
これを受けて、図15に示すように、カプセル型医療装置2の制御部6は、拡張収縮機構22を作動させてバルーン13を収縮させると共に、電極5に供給していた電流を停止して電気刺激を終了する。その後、カプセル型医療装置2は、自然に排泄される。この際、バルーン13は、収縮しているので、排泄性が向上する。
このように本実施形態によれば、観察が必要な大腸内でのみ駆動することが可能であり、より効率的な観察を行うことができる。
例えば、上記各実施形態において、電極を筐体の軸方向に対して一端側及び他端側にそれぞれ設けた構成にしたが、これに限られず、どちらか一方でも構わないし、さらに複数設けても構わない。また、上記各実施形態において、電極は筐体の外表面又はバルーンの外表面に設ける構成としたが、電極が筐体の外表面近傍に配置され、導電性の高い材質により構成された外表面の部材が電極を覆うように構成しても構わない。この場合、筐体の外表面において正極から負極への短絡を防ぐために、正極を覆う部材と負極を覆う部材との間は絶縁状態にしておく。こうすることで、電極が小さな形状であっても、筐体の外表面の部材を介して生体組織の広い範囲に電気刺激を行うことが可能である。
また、体外装置の制御部が有する機能を、カプセル型医療装置の制御部に持たせても構わない。こうすることで、カプセル型医療装置と体外装置との間の無線通信を、カプセル型医療装置から体外装置への一方向送信(生体情報)に変更することが可能である。
なお、このカプセル型医療装置においても、上述したカプセル型医療装置システムと同様に、pHセンサやバルーンも設けても構わない。
このタイマは、生体内に投入されてから特定の部位に達するまでの時間が予め設定されている。このカプセル型医療装置を上記第2実施形態に適用した場合には、経肛門から体内に投入されてから盲腸に達するまでをタイマの時間で判断することができると共に、さらに盲腸から肛門に達するまでをタイマの時間で判断することが可能である。そして、判断手段により判断した生体部位に応じて、制御部がバルーンの拡張収縮や電気刺激を行うように設定すれば良い。
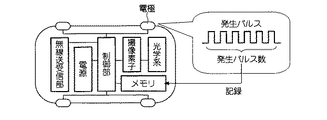
なお、パラメータは、上記時間だけに限られず、例えば、図19に示すように、電極で発生したパルス数等の電気刺激量でも良く、該パルス数に基づいて目的部位を判断しても構わない。この場合には、電極に対してパルス状に電力を供給するように電流発生回路を設定し、発生したパルス数をメモリに保存し、予め設定しておいた数に達したときにパルスの発生を停止する等の判断を行っても良い。
なお、電気刺激量は、パルス数だけでなくパルス幅の和、パルス強度の分布や、電極で発生した電流の積分量でも構わない。
2 カプセル型医療装置
3 体外装置
4 位置検出回路(位置検出手段)
5 電極
6 制御部(制御手段)
10 筐体
11 取得手段(撮像手段)
12 無線送受信部(発信部、検知部)
13 バルーン
20 撮像素子
31 無線送受信部(発信部、検知部)
32 記録手段
40 pHセンサ
45、50、55、60 位置検出手段
46 受信アンテナ
51 磁力発生手段
52 外部コイル(磁力検出手段)
56 体内加速度センサ
57 体外加速度センサ
61 磁石
Claims (10)
- 生体内に投入可能なカプセル型医療装置を備えたカプセル型医療装置システムにおいて、
前記カプセル型医療装置システムが、前記カプセル型医療装置の生体内での位置を検出する位置検出手段と、前記カプセル型医療装置の外表面近傍に設けられ、前記カプセル型医療装置が進退するための力を発生させるために生体組織を収縮させる刺激を与える電極と、前記電極に流す電流を制御する制御手段とを備え、
前記位置検出手段にて検出された位置情報に応じて、前記電極に流す電流を前記制御手段が制御することを特徴とするカプセル型医療装置システム。 - 請求項1に記載のカプセル型医療装置システムにおいて、
前記カプセル型医療装置が、生体情報を取得する取得手段を備え、
前記取得手段で取得した生体情報を用いて、前記位置検出手段が前記カプセル型医療装置の生体内での位置を判断することを特徴とするカプセル型医療装置システム。 - 請求項2に記載のカプセル型医療装置システムにおいて、
前記取得手段が、生体内を撮像する撮像手段であり、
前記位置検出手段が、前記撮像手段で取得した画像を基に、前記カプセル型医療装置の生体内での位置を検出することを特徴とするカプセル型医療装置システム。 - 請求項1に記載のカプセル型医療装置システムにおいて、
前記カプセル型医療装置システムが、生体外に設置する体外装置を備え、
前記カプセル型医療装置と前記体外装置の、少なくともいずれか一方に物理量を発する発信部を備え、他方に前記発信部から発せられた物理量を検知する検知部を備え、
前記位置検出手段が、前記検知部が検知した物理量を用いて前記カプセル型医療装置の生体内での位置を検出することを特徴とするカプセル型医療装置システム。 - 請求項1に記載のカプセル型医療装置システムにおいて、
前記カプセル型医療装置システムが、生体外に設置する体外装置を備え、
前記カプセル型医療装置が、体内加速度センサを備え、
前記体外装置が、体外加速度センサを備え、
前記位置検出手段が、前記体内加速度センサと前記体外加速度センサの差分により、前記カプセル型医療装置の生体内での位置を検出することを特徴とするカプセル型医療装置システム。 - 請求項1に記載のカプセル型医療装置システムにおいて、
前記位置検出手段が、設定部を備え、
前記設定部に、生体内で前記カプセル型医療装置が目的部位に達するまでに必要なパラメータが予め設定されていることを特徴とするカプセル型医療装置システム。 - 請求項1から6のいずれか1項に記載のカプセル型医療装置システムにおいて、
前記カプセル型医療装置が、生体組織に密着するように拡張又は収縮可能なバルーンを備え、
前記電極が、前記バルーンの外表面に設けられ、
前記制御手段が、前記位置情報に基づいて前記バルーンを拡張又は収縮させることを特徴とするカプセル型医療装置システム。 - 請求項1から7のいずれか1に記載のカプセル型医療装置システムにおいて、
前記制御手段が、前記位置情報に基づいて、前記電極への電流の供給又は停止を制御することを特徴とするカプセル型医療装置システム。 - 請求項8に記載のカプセル型医療装置システムにおいて、
前記カプセル型医療装置が、前記電極を複数備え、
前記制御手段が、前記位置情報に基づいて、前記複数の電極から電流を供給する電極を選択することを特徴とするカプセル型医療装置システム。 - 請求項9に記載のカプセル型医療装置システムにおいて、
前記位置検出手段が、前記位置情報に基づいて、蠕動運動の方向を検出し、
前記制御手段が、検出された前記蠕動運動の方向に基づいて、前記電流を供給する電極を選択することを特徴とするカプセル型医療装置システム。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003432674A JP4094543B2 (ja) | 2003-12-26 | 2003-12-26 | カプセル型医療装置システム |
| PCT/JP2004/016585 WO2005044094A1 (ja) | 2003-11-11 | 2004-11-09 | カプセル型医療装置システム、及びカプセル型医療装置 |
| US10/984,279 US7918786B2 (en) | 2003-11-11 | 2004-11-09 | Capsule type medical device system, and capsule type medical device |
| EP04818231A EP1690490B1 (en) | 2003-11-11 | 2004-11-09 | Capsule type medical device system |
| US12/417,140 US8303490B2 (en) | 2003-11-11 | 2009-04-02 | Capsule type medical device system, and capsule type medical device |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003432674A JP4094543B2 (ja) | 2003-12-26 | 2003-12-26 | カプセル型医療装置システム |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2005185644A JP2005185644A (ja) | 2005-07-14 |
| JP2005185644A5 JP2005185644A5 (ja) | 2007-03-08 |
| JP4094543B2 true JP4094543B2 (ja) | 2008-06-04 |
Family
ID=34790303
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2003432674A Expired - Fee Related JP4094543B2 (ja) | 2003-11-11 | 2003-12-26 | カプセル型医療装置システム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4094543B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009247691A (ja) * | 2008-04-08 | 2009-10-29 | Nippon Telegr & Teleph Corp <Ntt> | 直腸内回転器、検知装置および直腸刺激装置 |
Families Citing this family (38)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2006028281A1 (en) | 2004-09-08 | 2006-03-16 | Olympus Corporation | Capsule type medical device |
| JP4593211B2 (ja) * | 2004-09-08 | 2010-12-08 | オリンパス株式会社 | カプセル型医療装置 |
| JP4642424B2 (ja) * | 2004-10-08 | 2011-03-02 | オリンパス株式会社 | 体内医療装置 |
| JP4812418B2 (ja) * | 2005-12-06 | 2011-11-09 | オリンパス株式会社 | 内視鏡装置 |
| JP4757021B2 (ja) * | 2005-12-28 | 2011-08-24 | オリンパス株式会社 | 位置検出システム |
| US9138250B2 (en) | 2006-04-24 | 2015-09-22 | Ethicon Endo-Surgery, Inc. | Medical instrument handle and medical instrument having a handle |
| US7597661B2 (en) * | 2006-05-11 | 2009-10-06 | Ethicon Endo-Surgery, Inc. | Medical instrument having a catheter and method for using a catheter |
| US7761134B2 (en) * | 2006-10-20 | 2010-07-20 | Given Imaging Ltd. | System and method for modeling a tracking curve of an in vivo device |
| CN101605492B (zh) | 2007-02-05 | 2011-08-17 | 奥林巴斯医疗株式会社 | 显示装置以及使用了该显示装置的被检体内信息获取系统 |
| JP2009226066A (ja) * | 2008-03-24 | 2009-10-08 | Olympus Corp | カプセル型医療装置 |
| JP5314913B2 (ja) * | 2008-04-03 | 2013-10-16 | オリンパスメディカルシステムズ株式会社 | カプセル医療システム |
| JP4902620B2 (ja) * | 2008-10-21 | 2012-03-21 | オリンパスメディカルシステムズ株式会社 | カプセル誘導システム |
| EP2461818B1 (en) * | 2009-08-03 | 2018-10-17 | Incube Labs, Llc | Swallowable capsule and method for stimulating incretin production within the intestinal tract |
| JPWO2011058802A1 (ja) * | 2009-11-10 | 2013-03-28 | オリンパスメディカルシステムズ株式会社 | カプセル型医療装置用誘導システム |
| US8759284B2 (en) | 2009-12-24 | 2014-06-24 | Rani Therapeutics, Llc | Therapeutic agent preparations for delivery into a lumen of the intestinal tract using a swallowable drug delivery device |
| US8923949B2 (en) * | 2010-06-23 | 2014-12-30 | Biosense Webster (Israel) Ltd. | Transesophageal echocardiography capsule |
| US9861683B2 (en) | 2010-12-23 | 2018-01-09 | Rani Therapeutics, Llc | Therapeutic agent preparations for delivery into a lumen of the intestinal tract using a swallowable drug delivery device |
| US9415004B2 (en) | 2010-12-23 | 2016-08-16 | Rani Therapeutics, Llc | Therapeutic agent preparations for delivery into a lumen of the intestinal tract using a swallowable drug delivery device |
| US9259386B2 (en) | 2010-12-23 | 2016-02-16 | Rani Therapeutics, Llc | Therapeutic preparation comprising somatostatin or somatostatin analogoue for delivery into a lumen of the intestinal tract using a swallowable drug delivery device |
| US10639272B2 (en) | 2010-12-23 | 2020-05-05 | Rani Therapeutics, Llc | Methods for delivering etanercept preparations into a lumen of the intestinal tract using a swallowable drug delivery device |
| US8969293B2 (en) | 2010-12-23 | 2015-03-03 | Rani Therapeutics, Llc | Therapeutic agent preparations comprising exenatide for delivery into a lumen of the intestinal tract using a swallowable drug delivery device |
| US9283179B2 (en) | 2010-12-23 | 2016-03-15 | Rani Therapeutics, Llc | GnRH preparations for delivery into a lumen of the intestinal tract using a swallowable drug delivery device |
| US8980822B2 (en) | 2010-12-23 | 2015-03-17 | Rani Therapeutics, Llc | Therapeutic agent preparations comprising pramlintide for delivery into a lumen of the intestinal tract using a swallowable drug delivery device |
| US8734429B2 (en) | 2010-12-23 | 2014-05-27 | Rani Therapeutics, Llc | Device, system and methods for the oral delivery of therapeutic compounds |
| US9629799B2 (en) | 2010-12-23 | 2017-04-25 | Rani Therapeutics, Llc | Therapeutic agent preparations for delivery into a lumen of the intestinal tract using a swallowable drug delivery device |
| US9284367B2 (en) | 2010-12-23 | 2016-03-15 | Rani Therapeutics, Llc | Therapeutic agent preparations for delivery into a lumen of the intestinal tract using a swallowable drug delivery device |
| US9402806B2 (en) | 2010-12-23 | 2016-08-02 | Rani Therapeutics, Llc | Therapeutic agent preparations for delivery into a lumen of the intestinal tract using a swallowable drug delivery device |
| US8846040B2 (en) | 2010-12-23 | 2014-09-30 | Rani Therapeutics, Llc | Therapeutic agent preparations comprising etanercept for delivery into a lumen of the intestinal tract using a swallowable drug delivery device |
| US8809269B2 (en) | 2010-12-23 | 2014-08-19 | Rani Therapeutics, Llc | Therapeutic agent preparations comprising insulin for delivery into a lumen of the intestinal tract using a swallowable drug delivery device |
| US9402807B2 (en) | 2010-12-23 | 2016-08-02 | Rani Therapeutics, Llc | Therapeutic agent preparations for delivery into a lumen of the intestinal tract using a swallowable drug delivery device |
| WO2013153860A1 (ja) * | 2012-04-12 | 2013-10-17 | ソニー株式会社 | カプセル型医療装置およびシステム |
| JP5983738B2 (ja) * | 2012-04-12 | 2016-09-06 | ソニー株式会社 | カプセル型医療装置 |
| JP5548318B2 (ja) * | 2012-05-14 | 2014-07-16 | オリンパスメディカルシステムズ株式会社 | カプセル型医療装置及び医療システム |
| CN106922121B (zh) * | 2014-11-20 | 2019-03-01 | 奥林巴斯株式会社 | 胶囊内窥镜系统、胶囊内窥镜、胶囊内窥镜的无线通信方法和程序 |
| KR101570206B1 (ko) | 2014-12-26 | 2015-11-23 | 연세대학교 산학협력단 | 체내 장비와 통신하는 체외 장비, 및 그를 이용한 진단 장치 |
| JP6510591B2 (ja) * | 2017-07-19 | 2019-05-08 | キャプソ・ヴィジョン・インコーポレーテッド | マルチ密度相を有するカプセル装置に用いられるシステム及び方法 |
| CN110996009B (zh) * | 2019-12-20 | 2021-07-23 | 安翰科技(武汉)股份有限公司 | 胶囊内窥镜系统及其自动帧率调整方法及计算机可读存储介质 |
| CN114984454A (zh) * | 2022-07-20 | 2022-09-02 | 重庆金山医疗技术研究院有限公司 | 一种电针治疗仪 |
-
2003
- 2003-12-26 JP JP2003432674A patent/JP4094543B2/ja not_active Expired - Fee Related
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009247691A (ja) * | 2008-04-08 | 2009-10-29 | Nippon Telegr & Teleph Corp <Ntt> | 直腸内回転器、検知装置および直腸刺激装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2005185644A (ja) | 2005-07-14 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4094543B2 (ja) | カプセル型医療装置システム | |
| US7918786B2 (en) | Capsule type medical device system, and capsule type medical device | |
| JP4625146B2 (ja) | カプセル型内視鏡システム | |
| JP4398204B2 (ja) | 被検体内導入装置および無線型被検体内情報取得システム | |
| WO2005063122A1 (ja) | 被検体内位置検出システム | |
| JP2005192632A (ja) | 被検体内移動状態検出システム | |
| JP4593211B2 (ja) | カプセル型医療装置 | |
| WO2005092188A1 (ja) | 被検体内位置検出システム | |
| JP2005507687A (ja) | 生体内の装置を制御するためのシステムおよび方法 | |
| WO2005063121A1 (ja) | 被検体内位置検出システム | |
| CN100539935C (zh) | 胶囊型医疗装置系统、以及胶囊型医疗装置 | |
| KR100909308B1 (ko) | 무선형 피검체내 정보 취득 시스템 | |
| JP4020834B2 (ja) | カプセル型医療装置及びカプセル型医療装置通信システム | |
| JP4515112B2 (ja) | 無線型被検体内情報取得装置 | |
| JP4959965B2 (ja) | 体腔内導入装置留置システム | |
| JP2012081016A (ja) | 生体情報取得装置 | |
| US8496576B2 (en) | In-vivo information acquiring system and method for controlling in-vivo information acquiring system | |
| JP4547181B2 (ja) | 被検体内位置検出システム | |
| WO2012029491A1 (ja) | 体内情報取得装置および体内情報取得方法 | |
| JP4590176B2 (ja) | 無線型被検体内情報取得システム | |
| JP4590175B2 (ja) | 無線型被検体内情報取得システム | |
| JP2006034678A (ja) | 被検体内方位検出システム | |
| JP2005110932A (ja) | 無線型被検体内情報取得装置 | |
| JP5284592B2 (ja) | 被検体内情報取得システム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20061225 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20061226 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20070122 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20070911 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20071106 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20071204 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20080219 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20080305 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110314 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110314 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110314 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120314 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120314 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130314 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140314 Year of fee payment: 6 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| LAPS | Cancellation because of no payment of annual fees |