JP4096539B2 - 複合追尾センサ装置 - Google Patents
複合追尾センサ装置 Download PDFInfo
- Publication number
- JP4096539B2 JP4096539B2 JP2001295093A JP2001295093A JP4096539B2 JP 4096539 B2 JP4096539 B2 JP 4096539B2 JP 2001295093 A JP2001295093 A JP 2001295093A JP 2001295093 A JP2001295093 A JP 2001295093A JP 4096539 B2 JP4096539 B2 JP 4096539B2
- Authority
- JP
- Japan
- Prior art keywords
- target
- tracking
- signal
- flying
- radar
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images









Landscapes
- Aiming, Guidance, Guns With A Light Source, Armor, Camouflage, And Targets (AREA)
- Radar Systems Or Details Thereof (AREA)
Description
【発明の属する技術分野】
この発明は、空中目標に対して火力を発揮する射撃統制システムについて、母機から発射された小型な飛しょう目標に対する射撃統制システムの目標捕捉性能を向上させる技術に関するものである。
【0002】
【従来の技術】
図7は、レーダを主センサとする周知の射撃統制システムを説明する図である。追尾レーダ装置1は、送信した送信電波2が空中目標3に入射され反射された反射電波4を追尾レーダ装置1で受信することにより、追尾レーダ装置1と空中目標3との相対距離及び旋回角、俯仰角の3諸元から成る目標追尾データ5を出力する。射撃計算装置6は目標追尾データ5を入力として射撃計算することで、見越し角指令データ7を火力システム8へ出力する。これによって、火力システム8は空中目標3に火器を指向することができ、対処が可能となる。
【0003】
次に、母機から発射された小型な飛しょう目標に対する従来の目標捕捉方法を、図8及び図9を用いて説明する。
図8は、追尾レーダ装置1が母機目標8を追尾している時に、母機目標8から発射された小型な飛しょう目標9を捕捉する方法を説明している。この追尾レーダ装置1は、図7に示した追尾レーダ装置1と同じものである。
【0004】
すなわち、追尾レーダ装置1は、母機目標8が追尾ビーム10内にいるとき、母機目標8に対応する母機目標信号11を取得することができる。この場合、母機目標8に対する捕捉・追尾処理方法として、追尾レーダ装置1の距離及び角度分解能よりも精度のよい目標追尾データ5を得るために、母機目標信号11に対して母機目標追尾ゲート12を設けるという、追尾ゲート処理が一般的に利用されている。また、飛しょう目標9の捕捉・追尾処理方法も同様に、追尾レーダ装置1が取得する飛しょう目標9の飛しょう目標信号13に対して飛しょう目標追尾ゲート14を設ける。
【0005】
さらに、追尾レーダ装置1は、母機目標8から発射された飛しょう目標9を捕捉するためには、追尾レーダ装置が追尾している母機目標8用の母機目標追尾ゲート12と追尾レーダ装置1との間に飛しょう目標追尾ゲート14を設ければ、追尾レーダ装置1に向けて発射された飛しょう目標9の飛しょう目標信号13が飛しょう目標追尾ゲート14内に進入することにより、飛しょう目標9への目標捕捉が可能となる。
【0006】
ここで、目標捕捉・追尾処理の動作について説明する。
図9について、追尾レーダ装置1及び送信電波2、反射電波4、目標追尾データ5、射撃計算装置6は図7と同じであり、母機目標8及び飛しょう目標9は図8と同じである。追尾レーダ装置1は、飛しょう目標9を捕捉するための構成となっている。
【0007】
この追尾レーダ装置1は、レーダ装置15と捕捉・追尾処理部17とから成る。
まず、レーダ装置15は、受信した反射電波4に基づいて得た母機目標信号11及び飛しょう目標信号13を含むレーダ受信信号16を捕捉・追尾処理部17へ出力する。続いて、捕捉・追尾処理部17は、受取ったレーダ受信信号16の母機目標信号11及び飛しょう目標信号13に対して母機目標追尾ゲート12及び飛しょう目標追尾ゲート14を発生させて追尾ゲート処理をし、当該追尾ゲート処理したレーダ受信信号16をフィルタリング処理して目標追尾データ5として射撃計算装置6に出力する。また、捕捉・追尾処理部17は、受取ったレーダ受信信号16に基づいて追尾ビーム・ステアリング指令信号18をレーダ装置15に出力し、追尾ビーム10内に飛しょう目標9が存在するように制御する。レーダ装置15は入力した追尾ビーム・ステアリング指令信号18を元に追尾ビーム10をステアリングすることで、飛しょう目標9への目標捕捉が可能となる。
【0008】
【発明が解決しようとする課題】
ところで、飛しょう目標9が低空を飛しょうした場合の目標捕捉処理の問題が発生するので、この問題について図8を用いて説明する。図8において、母機目標追尾ゲート12及び飛しょう目標追尾ゲート14内にあるクラッタ反射信号19は、グランド20から反射された反射電波を追尾レーダ装置1が受信した信号である。
【0009】
すなわち、追尾レーダ装置1は、母機目標8を追尾中に、飛しょう目標追尾ゲート14内にレーダ受信信号16が入力されると、捕捉処理を実行する。従って、追尾レーダ装置1は、飛しょう目標追尾ゲート14内に、飛しょう目標信号13が進入する前にクラッタ反射信号19が存在していれば、クラッタ反射信号19に対して捕捉処理を実行してしまう。
【0010】
このため、クラッタ反射信号19の対策として、追尾ゲート処理の前に既存の各種クラッタ抑圧処理でクラッタ反射信号19を抑圧する手段も考えられるが、低空になればなるほどクラッタ反射信号19の信号強度が大きくなるため、信号強度の小さい飛しょう目標9からの飛しょう目標信号13との分別が困難となり、飛しょう目標9とは異なる信号に対して目標捕捉処理をしてしまうという課題があった。
【0011】
また、飛しょう目標9が追尾レーダ装置1以外の目標に向けて発射された場合、目標捕捉処理につき問題が発生するので、この問題について図10を用いて説明する。図10において、地上目標21は、母機目標8が飛しょう目標9で対処されようとしている目標である。
【0012】
すなわち、母機目標8から追尾レーダ装置1以外の地上目標21に対して発射された飛しょう目標9に対して、追尾レーダ装置1と地上目標21との位置関係によっては、飛しょう目標9が追尾ビーム10から外れるため飛しょう目標追尾ゲート14内に進入しない場合がある。この場合、追尾レーダ装置1は、飛しょう目標9を捕捉できなくなってしまう。
【0013】
対策として、飛しょう目標追尾ゲート14を母機追尾ゲート12に近付ければ、飛しょう目標追尾ゲート14を母機追尾ゲート12に進入する可能性が大きくなるが、飛しょう目標追尾ゲート14を母機目標追尾ゲート12に近付けすぎると、飛しょう目標追尾ゲート14に母機目標信号11が入力されてしまうので、近付けるには限界がある。よって、飛しょう目標追尾ゲート14内に飛しょう目標9が進入しないような飛しょうをする場合には、飛しょう目標追尾ゲート14内に信号が存在しない場合があるため、飛しょう目標9への目標捕捉は不可能という課題があった。
【0014】
【課題を解決するための手段】
この発明は、第1の追尾目標と、当該第1の追尾目標に取付けられた第2の追尾目標とに向けて追尾ビームを照射するレーダ装置と、第1の追尾目標から発射された第2の追尾目標によって放射されるプルームを検出するEOセンサと、EOセンサからの検出結果に基づいてレーダ装置からの追尾目標の検出信号を出力する捕捉処理部と、捕捉処理部からの検出信号に基づいてレーダ装置を制御して、追尾目標を捕捉及び追尾処理する捕捉追尾処理部とを備えるようにしたものである。
【0015】
また、この発明は、捕捉処理部は、EOセンサがプルームの検出を行っていない際のレーダ装置からの検出信号の信号レベルを基準値として設定し、レーダ装置からの検出信号が基準値よりも高い場合に、当該検出信号を捕捉処理部に出力するようにしたものである。
【0016】
また、この発明は、第1の追尾目標と、当該第1の追尾目標に取付けられた第2の追尾目標とに向けて追尾ビームを照射するレーダ装置と、第1の追尾目標から発射された第2の追尾目標によって放射されるプルームを検出し、当該検出したプルームを連続して測角することにより目標追尾データを出力するEOセンサと、EOセンサからの目標追尾データに基づいてレーダ装置を制御して、追尾目標を捕捉及び追尾処理する捕捉追尾処理部とを備えるようにしたものである。
【0017】
また、この発明は、EOセンサによる検出領域に、レーダ装置による追尾ビームが重なり合うようにしたものである。
【0018】
【発明の実施の形態】
実施の形態1.
図1は、この発明による複合追尾センサ装置の実施の形態1の構成図である。
図1において、複合追尾センサ装置22は、レーダ装置15と捕捉・追尾処理部17とから成る追尾レーダ装置1と、光波センサであるEO(Electro Optical)センサ23と、捕捉処理部24とから構成されている。具体的に、本実施の形態のEOセンサ23としては、赤外線を検出するIR(Infrared)カメラを用いている。因みに、EOセンサ23としては、紫外線を検出するUV(Ultra Violet)カメラ等を用いるようにしても良い。
【0019】
まず、EOセンサ23は、第1の追尾目標である母機目標8と第2の追尾目標である飛しょう目標9とを見ており、母機目標8に取付けられた飛しょう目標9が発射する際に当該飛しょう目標9から放射されるプルーム25を検出することにより、飛しょう目標9が発射されたことを示す発射検出信号27を捕捉処理部24へ出力するものである。実際上、EOセンサ23は、プルーム25から放射される反射赤外波26を検出することにより、プルーム25の検出を行っている。因みに、プルームとは、飛しょう体の推進薬が燃焼したときに空中に放射される高温度のガスである。
【0020】
また、捕捉処理部24は、EOセンサ23からの発射検出信号27とレーダ装置15からのレーダ受信信号16とを入力し、発射検出信号27に基づいて、当該レーダ信号16のうち飛しょう目標追尾ゲート14部分をマスクしたレーダ信号(以下、所望レーダ受信信号28と呼ぶ)を捕捉・追尾処理部17へ出力する。すなわち、捕捉処理部24は、目標追尾ゲート14(図2)には飛しょう目標9の飛しょう目標信号13のみを通過させることとなる。他の構成については、従来の技術との相違は無い。
【0021】
次に、実施の形態1に示す複合追尾センサ装置の動作について、図2を用いて説明する。
図2において、29はEOセンサ23の撮像範囲であり、9’は母機から発射された直後の飛しょう目標9である。追尾レーダ装置1が設けた母機目標追尾ゲート12によって母機目標8を追尾している時、追尾ビーム10に角度スレーブしたEOセンサ23を用意することで、母機目標8方向にEOセンサ23の撮像範囲29を指向することができる。母機目標8が発射した飛しょう目標9’が放射するプルーム25をEOセンサ23で検出して発射検出信号27を取得することで、飛しょう目標9に対する母機からの発射判定が可能となる。
【0022】
ここでEOセンサ23は、プルーム25を検出する方法として、複数毎の画像を比較し、その差によって目標を検出するという一般的な画像処理を用いている。すなわち、EOセンサ23は、母機目標8をすでに追尾しており、取得した複数枚の画像情報を用意して母機目標8の占有する画素どうしを比較する。プルーム信号は母機目標よりも信号レベルが高いために画素の信号レベルの変化量が大きなものとなるため、EOセンサ23は、かかる比較の結果に基づいて、プルーム信号を目標信号として検出することができる。
【0023】
因みに、EOセンサ23がプルームを撮像したときの撮像画像35の一例としては、図3に示すとおりである。すなわち、遠方にある小型な飛しょう体から放射されるプルーム25は、EOセンサ23で撮像すると、放射する目標が小型でありかつ遠方にあるがために占有画素数が少なく、かつ、高温であるために信号強度レベルが高いという特徴がある。この場合、EOセンサ23で取得した目標信号と不要信号とを含む撮像画像情報から目標信号を検出するためは、目標信号と不要信号とを分類することが必要である。
ノイズ36に対する対処方法としては、ノイズ36は時間及び空間的に相関性が無いのに対し、目標信号は常に同じ画素で信号を出力しているため、EOセンサ23で取得した複数枚の画像情報を用意して画素どうしを比較することで、常に輝度の高い信号を目標信号として分類するという画像処理を行っている。
また、クラッタ37に対する対処方法としては、クラッタ37は一般的に画像に対する占有画素数が多いのに対し、目標信号は占有画素数が少ないため、ある画素数以下の信号を目標信号として分類するという画像処理を行っている。
【0024】
そして、捕捉・追尾処理部17は、EOセンサ23を利用した発射判定結果を利用することで、飛しょう目標追尾ゲート14内に、クラッタ等によって発生する信号が存在しても発射判定結果が「発射前」、すなわち発射検出信号27が出力されない状態であれば捕捉処理へ移行しないようにし、「発射後」、すなわち発射検出信号27が出力された状態であれば新規に飛しょう目標追尾ゲート14内に発生した信号に対して捕捉処理へ移行する。
従って、捕捉・追尾処理部17は、受取ったレーダ受信信号16に基づいて追尾ビーム・ステアリング指令信号18をレーダ装置15に出力し、追尾ビーム10内に飛しょう目標9が存在するように当該レーダ装置15を制御する。
【0025】
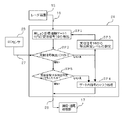
次に、捕捉処理部24の動作について、図4を用いて説明する。
まず、捕捉処理部24は、レーダ装置15から入力したレーダ受信信号16に対して、飛しょう目標追尾ゲート14内のレーダ受信信号16を検出する(ステップSP1)。
【0026】
続いて、捕捉処理部24は、EOセンサ23から入力した発射検出信号27がON(発射検出信号が出力された状態)かOFF(発射検出信号が出力されない状態)かを判断し(ステップSP2)、OFFと判断した場合、すなわち、母機目標8から飛しょう目標9が発射されていない場合には、飛しょう目標追尾ゲート14内のレーダ受信信号16はクラッタ反射信号19であると考えられるため、レーダ受信信号16の信号レベルを検出し、その信号レベルを、飛しょう目標信号13とクラッタ反射信号19との分別を可能とする検出判定レベル(基準値)として設定する(ステップSP3)。
さらに、捕捉処理部24は、レーダ受信信号16に対して飛しょう目標追尾ゲート内の信号をマスク処理し(ステップSP4)、当該マスク処理した所望レーダ受信信号28を捕捉・追尾処理部17へ出力することで、捕捉処理を実行させなくする。
【0027】
一方、捕捉処理部24は、EOセンサ23から入力した発射検出信号27がONと判断した場合、すなわち、母機目標8から飛しょう目標9が発射された場合には、続いて、レーダ受信信号16が検出判定レベルを越えたかを判定する(ステップSP5)。ここで、レーダ受信信号16が検出判定レベルを越えていない場合は、飛しょう目標9が発射されたが飛しょう目標追尾ゲート14まで飛しょう目標が飛しょうしていないと考えられるため、捕捉処理部24は、レーダ受信信号16に対して飛しょう目標追尾ゲート内の信号をマスクした所望レーダ受信信号28を捕捉・追尾処理部17へ出力することで、捕捉処理を実行させなくする。また、レーダ受信信号16が検出判定レベルを越えた場合は、飛しょう目標追尾ゲート14に飛しょう目標9が進入したと考えられるため、捕捉処理部24は、レーダ受信信号16そのままを所望レーダ受信信号28として捕捉・追尾処理部17へ出力することで、捕捉処理を実行することができる。
【0028】
参考例. 図5はこの発明による複合追尾センサ装置の実施の形態1の構成図である。図5において、複合追尾センサ装置22は、図7に示す追尾レーダ装置1と、当該追尾レーダ装置1の捕捉・追尾処理部17に設けられたEOセンサ23とから構成されている。そして、EOセンサ23は、母機目標8と飛しょう目標9と母機目標8から飛しょう目標9の発射時に生じるプルーム25から放射された反射赤外波26を入力してプルーム25を検出し、検出結果に基づいてプルーム25を測角して得た目標角度追尾データ30を捕捉・追尾処理部17へ出力する。実際上、EOセンサ23は、プルーム25を側角する場合、当該EOセンサ23自身が向いている方向と、EOセンサ23が撮像した画面におけるプルーム25の位置とに基づいて、プルーム25に対する角度を測角する。そして、EOセンサ23は、連続して測角した角度を、目標角度追尾データ30として捕捉・追尾処理部17へ出力する。また、捕捉・追尾処理部17は、目標角度追尾データ30に従い、追尾ビーム・ステアリング指令信号18をレーダ装置15へ出力し、追尾ビーム10内に飛しょう目標9が存在するように当該レーダ装置15を制御する。
【0029】
次に、この参考例に示す複合追尾センサ装置の動作を図6を用いて説明する。図6において、追尾レーダ装置1が設けた母機目標追尾ゲート12によって母機目標8を追尾している時、追尾ビーム10にEOセンサ23を角度スレーブすることにより、母機目標8方向にEOセンサ23の撮像範囲29を指向する。
【0030】
そして、EOセンサ23は、母機目標8が発射して飛行する飛しょう目標9’のプルーム25を飛しょう目標9’’のプルーム25’まで連続して測角していくことにより、プルーム25に対する目標角度追尾データ30を追尾レーダ装置1に出力する。続いて、追尾レーダ装置1の捕捉・追尾処理部17は、受取った目標角度追尾データ30に従って追尾ビーム10を10’→10のようにステアリングさせることにより、飛しょう目標9を追尾ビーム10内に確保できる。
かくして、追尾レーダ装置1は、飛しょう目標追尾ゲート14内に飛しょう目標9が進入することにより、飛しょう目標信号13を取得することができ、追尾レーダ装置1の追尾範囲外に存在する地上目標21に対しても、母機目標25から発射された飛しょう目標9の捕捉が可能となる。
【0031】
【発明の効果】
この発明によれば、母機目標から発射され、かつ、低空を飛しょうする飛しょう目標に対する目標捕捉が可能となる。
【0032】
また、この発明によれば、レーダ装置からの検出信号のうち、追尾目標が含まれた検出信号のみを捕捉・追尾処理部に出力することができ、捕捉・追尾処理部の負荷を低減することができる。
【0033】
また、この参考例によれば、母機目標から追尾レーダ装置以外の目標に向けて発射された飛しょう目標に対する目標捕捉が可能となる。
【図面の簡単な説明】
【図1】 この発明による実施の形態1の複合追尾センサ装置を示すブロック図である。
【図2】 実施の形態1に示す複合追尾センサ装置の動作の説明に供する略線図である。
【図3】 EOセンサが撮像する画像情報の略線図である。
【図4】 この発明による捕捉処理部24の実施の形態1の動作を示すフローチャートである。
【図5】 参考例の複合追尾センサ装置を示すブロック図である。
【図6】 参考例の複合追尾センサ装置の動作を説明する略線図である。
【図7】 従来の射撃統制システムを説明するブロック図である。
【図8】 従来の目標捕捉技術について、追尾目標から発射された飛しょう目標に対する目標捕捉の方法を説明し、かつ、飛しょう目標が低空を飛しょうした場合の課題を説明する略線図である。
【図9】 従来の目標捕捉技術について、追尾目標から発射された飛しょう目標に対する目標捕捉の動作を説明するブロック図である。
【図10】 従来の目標捕捉技術について、飛しょう目標が追尾ゲートを外れた場合の課題を説明する略線図である。
【符号の説明】
1 追尾レーダ装置、2 送信電波、3 空中目標、4 反射電波、5 目標追尾データ、6 射撃計算装置、7 見越し角データ、8 母機目標、9 飛しょう目標、10 追尾ビーム、11 母機目標信号、12 母機目標追尾ゲート、13 飛しょう目標信号、14 飛しょう目標追尾ゲート、15 レーダ装置、16 レーダ受信信号、17 捕捉・追尾処理部、18 追尾ビーム・ステアリング指令信号、19 クラッタ反射信号、20 グランド、21 地上目標、22 複合追尾センサ装置、23 EOセンサ、24 捕捉処理部、25 プルーム、26 反射赤外波、27 発射検出信号、28 所望レーダ受信信号、29 撮像範囲、30 目標角度追尾データ、35 撮像画像、36 ノイズ、37 クラッタ。
Claims (1)
- 第1の追尾目標と、当該第1の追尾目標に取付けられた第2の追尾目標とに向けて電波を送信し、上記第1の追尾目標と上記第2の追尾目標で反射された反射電波に基づいて取得したレーダ受信信号を出力するレーダ装置と、
上記第1の追尾目標から発射された上記第2の追尾目標によって放射されるプルームを検出すると発射検出信号を出力するEOセンサと、
上記発射検出信号を検出しない間は上記第2の追尾目標に対して設けた目標追尾ゲート内に存在する上記レーダ受信信号のレベルを検出してそのレベルを判定基準値として設定し、上記発射検出信号を検出すると上記目標追尾ゲート内に存在する上記レーダ装置からの上記レーダ受信信号のレベルと上記判定基準値とを比較し、当該レーダ受信信号のレベルが上記判定基準値を超えたと判定すると上記レーダ受信信号を捕捉追尾処理部に出力する捕捉処理部と、
上記目標追尾ゲート内に存在する、上記捕捉処理部からの上記レーダ受信信号を信号処理して上記第2の追尾目標を捕捉する捕捉追尾処理部と、
を備えることを特徴とする複合追尾センサ装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2001295093A JP4096539B2 (ja) | 2001-09-26 | 2001-09-26 | 複合追尾センサ装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2001295093A JP4096539B2 (ja) | 2001-09-26 | 2001-09-26 | 複合追尾センサ装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2003098255A JP2003098255A (ja) | 2003-04-03 |
| JP2003098255A5 JP2003098255A5 (ja) | 2005-10-27 |
| JP4096539B2 true JP4096539B2 (ja) | 2008-06-04 |
Family
ID=19116586
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2001295093A Expired - Fee Related JP4096539B2 (ja) | 2001-09-26 | 2001-09-26 | 複合追尾センサ装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4096539B2 (ja) |
Families Citing this family (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3098624A1 (en) | 2004-07-02 | 2016-11-30 | Trackman A/S | A method and apparatus for determining a deviation between an actual direction of a launched projectile and a predetermined direction |
| ATE471746T1 (de) | 2005-03-03 | 2010-07-15 | Interactive Sports Games As | Bestimmung von drallparametern eines sportballes |
| US10393870B2 (en) | 2005-03-03 | 2019-08-27 | Trackman A/S | Determination of spin parameters of a sports ball |
| US9645235B2 (en) | 2005-03-03 | 2017-05-09 | Trackman A/S | Determination of spin parameters of a sports ball |
| KR101845503B1 (ko) | 2009-01-29 | 2018-04-04 | 트랙맨 에이/에스 | 레이더 및 촬상 요소를 포함하는 조립체 |
| JP5424662B2 (ja) * | 2009-01-30 | 2014-02-26 | 三菱電機株式会社 | 目標追尾装置 |
| EP2605036B1 (en) | 2011-12-16 | 2019-10-23 | Trackman A/S | A method and a sensor for determining a direction-of-arrival of impingent radiation |
| US10379214B2 (en) | 2016-07-11 | 2019-08-13 | Trackman A/S | Device, system and method for tracking multiple projectiles |
| US10444339B2 (en) | 2016-10-31 | 2019-10-15 | Trackman A/S | Skid and roll tracking system |
| US10989791B2 (en) | 2016-12-05 | 2021-04-27 | Trackman A/S | Device, system, and method for tracking an object using radar data and imager data |
| CN112799051B (zh) * | 2020-12-24 | 2022-12-09 | 济南和普威视光电技术有限公司 | 一种低慢小目标的自动捕获跟踪方法及系统 |
-
2001
- 2001-09-26 JP JP2001295093A patent/JP4096539B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2003098255A (ja) | 2003-04-03 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR100524337B1 (ko) | 미사일 위협으로부터 항공기를 보호하는 방법 및 장치 | |
| EP2816309B1 (en) | Seeker having scanning-snapshot FPA | |
| US5001348A (en) | Method and apparatus for recognizing the start and motion of objects | |
| US10649087B2 (en) | Object detection system for mobile platforms | |
| US7909253B2 (en) | Image detection system and methods | |
| JP3035522B2 (ja) | 二色性能動追尾装置 | |
| JP4096539B2 (ja) | 複合追尾センサ装置 | |
| US20090080700A1 (en) | Projectile tracking system | |
| US9568583B2 (en) | Asynchronous pulse detection through sequential time sampling of optically spread signals | |
| US10126101B2 (en) | Seeker/designator handoff system for use in dual-mode guided missiles | |
| EP2816310B1 (en) | Laser-aided passive seeker | |
| JP3222837B2 (ja) | 画像化自己参照追跡装置及び関連方法 | |
| US9857145B1 (en) | Target-designation detection used to shutter camera images for locating target | |
| WO2014203243A1 (en) | Threat warning system integrating flash event and transmitted laser detection | |
| US20070092109A1 (en) | Method of tracking a moving object by an emissivity of the moving object | |
| KR101924208B1 (ko) | 시계 가변이 가능한 적외선 영상 센서 및 이를 포함하는 영상 호밍 장치 | |
| US20200263958A1 (en) | Active seeker head system | |
| JP2015537290A (ja) | 画像処理方法、該画像処理方法と共に実行される対象物自動検出方法、観測装置、及び、発射されたロケットの飛翔経路を遠距離から高精度で追跡する方法 | |
| RU2849147C1 (ru) | Способ защиты многофункционального оптико-электронного средства от лазерного излучения |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD01 | Notification of change of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7421 Effective date: 20040706 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20050819 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20050819 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20070821 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20071018 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20071120 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20080111 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20080219 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20080303 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110321 Year of fee payment: 3 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20080111 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110321 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120321 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130321 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130321 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140321 Year of fee payment: 6 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |