JP4165229B2 - 永久磁石温度センサ、永久磁石モータ、永久磁石モータの駆動システム - Google Patents
永久磁石温度センサ、永久磁石モータ、永久磁石モータの駆動システム Download PDFInfo
- Publication number
- JP4165229B2 JP4165229B2 JP2003005398A JP2003005398A JP4165229B2 JP 4165229 B2 JP4165229 B2 JP 4165229B2 JP 2003005398 A JP2003005398 A JP 2003005398A JP 2003005398 A JP2003005398 A JP 2003005398A JP 4165229 B2 JP4165229 B2 JP 4165229B2
- Authority
- JP
- Japan
- Prior art keywords
- permanent magnet
- temperature
- rotor
- magnetizing element
- magnetic
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images






Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01K—MEASURING TEMPERATURE; MEASURING QUANTITY OF HEAT; THERMALLY-SENSITIVE ELEMENTS NOT OTHERWISE PROVIDED FOR
- G01K7/00—Measuring temperature based on the use of electric or magnetic elements directly sensitive to heat ; Power supply therefor, e.g. using thermoelectric elements
- G01K7/36—Measuring temperature based on the use of electric or magnetic elements directly sensitive to heat ; Power supply therefor, e.g. using thermoelectric elements using magnetic elements, e.g. magnets, coils
- G01K7/38—Measuring temperature based on the use of electric or magnetic elements directly sensitive to heat ; Power supply therefor, e.g. using thermoelectric elements using magnetic elements, e.g. magnets, coils the variations of temperature influencing the magnetic permeability
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Permanent Magnet Type Synchronous Machine (AREA)
Description
【発明の属する技術分野】
本発明は、ロータに永久磁石を配置した永久磁石モータにおける永久磁石の温度を測定する永久磁石温度センサ、永久磁石の温度を測定可能な永久磁石モータ、このような永久磁石モータの駆動システムに関する。
【0002】
【従来の技術】
永久磁石を配置したロータに対し、このロータを囲むステータに回転磁界を発生させ、この回転磁界と永久磁石との吸引及び反発によってロータを回転させる永久磁石モータが知られている。このような永久磁石モータでは、磁束密度の大きな永久磁石を使用することによって、誘導モータなどのように、永久磁石を持たないモータに対して、小型で強力なモータとなることができる。
【0003】
永久磁石が発生する磁束密度は、ある範囲内では、外部の磁界に比例して変化する。このため、外部の磁界が除去されれば、元の磁束密度に復帰する。しかし、外部の磁界が永久磁石の形成する磁束と逆向きで、その大きさがある程度以上になると、もはや外部の磁界を除去しても永久磁石の発生する磁束密度は元に戻らず、不可逆的に以前より小さな値となる。これを減磁という。ロータに用いられた永久磁石に減磁が生じると、モータの初期の性能が発揮できなくなるので、永久磁石モータは、減磁が起こらない条件で駆動することが望まれる。
【0004】
ところで、この減磁が生じない磁界の上限値(保磁力)は、一般に温度によって変化する。例えば、永久磁石としてフェライト系磁石を用いる場合、永久磁石の温度が高くなると保持力が低下し、減磁が生じやすくなる。このため、永久磁石の温度に応じた駆動を行うための装置として、例えば、特許文献1、特許文献2が知られている。
【0005】
このうち、特許文献1は、ベクトル制御される永久磁石形回転電機において、永久磁石の温度を計測または推定する手段を有し、温度変化による永久磁石の鎖交磁束の変化を、d軸電流の制御により補正する制御方式を提案している。しかしながら、永久磁石の温度を如何にして計測あるいは推定するのかについて詳細な言及がない。
【0006】
また、特許文献2は、永久磁石の温度を検出する温度検出手段と、励磁電流上限算出手段と、トルク指令に基づく励磁電流の大きさが励磁電流の上限値以下となるようにトルク指令を修正するトルク指令修正手段とを有する制御装置を提案している。そしてこの特許文献2では、温度検出手段として、永久磁石の温度を検出する温度検出器が挙げられているが、具体的に永久磁石の温度を測定する手法についての言及がない。なお、ステータとロータの温度の差が小さい場合、あるいは両者に相関がある場合には、ステータ温度に基づいて永久磁石の温度を推定することもできる旨が記載されている。
【0007】
【特許文献1】
特開2000−224812号公報(第2頁参照)
【特許文献2】
特開平09−289799号公報(第3頁、図4参照)
【0008】
【発明が解決しようとする課題】
しかしながら、特許文献2に記載のように、ステータ温度から永久磁石の温度を推定する場合、その応答性が極めて遅い問題がある。永久磁石の温度が上昇とすると、その後、ロータの温度が上昇する。さらに、ステータとロータとの間には間隙が存在しているから、温度を伝えにくいこの間隙を経由してステータの温度が上昇する。このような経路を取るため、ステータ温度が永久磁石の温度に追従するには長い時間が掛かるからである。ところで、モータが軽負荷で高速回転している場合には、永久磁石での渦電流損が大きくなってステータに比して温度が上がりやすい。このため、永久磁石の保護のため、永久磁石を減磁が生じない温度に保とうとすると、応答の遅れを見込んで、ステータの温度が低い状態でコイル電流に制限を与える必要がある。一方、モータを高負荷で運転している場合には、銅損が大きくなり、ステータの温度が高くなりやすく、永久磁石の温度は比較的低いままとなる。この場合にも、上述のような制御が働くので、永久磁石の温度の観点から見れば、十分余裕のある状態でコイル電流に制限が与えられるため、モータの本来の特性を十分発揮できない。
【0009】
このように、特許文献1及び2に記載の内容では、永久磁石の温度を適切に推定算出することができない。
本発明はかかる点に鑑みてなされたものであって、ロータに永久磁石を配置した永久磁石モータにおける永久磁石の温度を推定することができる永久磁石温度センサ、ロータに配置した永久磁石の温度を推定可能な永久磁石モータ、このような永久磁石モータを永久磁石の推定温度に応じて適切に駆動できる駆動システムを提供することを目的とする。
【0010】
【課題を解決するための手段、作用及び効果】
その解決手段は、ロータコアに所定の周方向ピッチで複数の永久磁石を配置したロータを有する永久磁石モータにおける上記永久磁石の温度を検知する永久磁石温度センサであって、自身の温度に応じて磁気特性が変化する感温磁性材料からなり、上記永久磁石の近傍に配置され、上記永久磁石が発生する磁束のうち上記ロータコアから漏れる漏れ磁束により磁化される磁化素子と、上記磁化素子の磁気特性の変化に応じて変化する物理量を検知する物理量検知手段と、を有する永久磁石温度センサである。
【0011】
本発明の永久磁石温度センサは、磁化素子と物理量検知手段を有する。このうち、磁化素子が永久磁石の近傍に配置されると、永久磁石による漏れ磁束で磁化される。つまり、自身も磁石として作用するので、磁化素子自身が磁界を発生し、周囲に影響を及ぼす。
モータを駆動するなどして永久磁石の温度が上昇すると、その近傍に位置する磁化素子もロータ(ロータコア全体)、あるいはステータよりも速やかにこれに追従して温度が上昇する。ところで、この磁化素子は、感温磁性材料からなるので、自身の温度変化によって磁気特性が変わるから、磁気特性の変化に応じて変化する物理量を観測していれば、この物理量の変化から、磁化素子の温度を知ることができる。そして、間接的に、永久磁石の温度を推定することができる。
但し、上述したように、磁化素子は、ロータのうち永久磁石の近傍に配置されているから、ステータの温度から永久磁石の温度を推定する場合よりも、正確に、且つ早い応答で永久磁石の温度を検知することができる。
かくして、物理量検知手段で検知した物理量の大きさから、永久磁石の温度を知ることができる。このセンサを用いれば、永久磁石の減磁が起こらない範囲でこのモータを動作させるように、モータ駆動の制御を行うことができる。
【0012】
磁化素子の磁気特性に応じて変化する物理量としては、例えば、磁化素子が永久磁石の磁界により磁化された場合に、磁化素子自身が発生する磁界の強さが挙げられる。また、磁化素子が永久磁石の磁界によって磁化することにより、磁化素子と永久磁石との間に生じる吸引力の大きさも挙げられる。
また、物理量検知手段は、磁化素子の磁気特性の変化に応じて変化する物理量を検知できるものであればよい。例えば、磁化素子の発生する磁界を物理量とする場合には、この磁界の強さを検知する磁界検知手段が挙げられる。また、磁化素子と永久磁石との間に生じる吸引力を物理量とする場合には、吸引力の大きさに応じて変化する磁化素子やその他の部材に生じる変位量や歪み量を検知する変位検知手段や歪み量検知手段などが挙げられる。さらに具体的には、磁界検知手段としては、例えば、ホール素子やピックアップコイルなどが挙げられる。また、変位検知手段や歪み量検知手段としては、変位計や歪みゲージなどを含む検知手段が挙げられる。
【0013】
他の解決手段は、ロータコアに所定の周方向ピッチで複数の永久磁石を配置したロータを有する永久磁石モータにおける上記永久磁石の温度を検知する永久磁石温度センサであって、自身の温度に応じて磁気特性が変化する感温磁性材料からなり、上記永久磁石の近傍に配置されて、上記永久磁石が発生する磁束のうち上記ロータコアから漏れる漏れ磁束により磁化される磁化素子と、ステータに配置されて、上記磁化素子の発生する磁界を検知する磁界検知手段と、を有する永久磁石温度センサである。
【0014】
本発明の永久磁石温度センサは、磁化素子と磁界検知手段を有する。このうち、磁化素子は永久磁石の近傍に配置されると、永久磁石による漏れ磁束で磁化される。つまり、自身も磁石として作用するので、磁化素子自身が発生する磁界が生じる。磁界検知手段は、この磁界を検知する。
ところで、永久磁石の温度が上昇すると、その近傍に位置する磁化素子も温度が上昇する。本発明の磁化素子は感温磁性材料からなるので、自身の温度変化によって磁気特性が変わるから、磁化素子が発生する磁界の強さも変化する。従って、磁界検知手段でこの磁界の大きさの変化を観測することで、磁化素子の温度を知ることができ、間接的に、永久磁石の温度を検知することができる。
磁化素子は、ロータのうち永久磁石の近傍に配置されているから、ステータの温度から永久磁石の温度を推定する場合よりも、正確に、且つ早い応答で永久磁石の温度を検知することができる。
なお、磁界検知手段としては、磁化素子が発生する磁界を検知できるものであればいずれのものでもよいが、例えば、ホール素子やピックアップコイルなどが挙げられる。
【0015】
さらに他の解決手段は、ロータコアに所定の周方向ピッチで複数の永久磁石を配置したロータを有する永久磁石モータにおける上記永久磁石の温度を検知する永久磁石温度センサであって、自身の温度に応じて磁気特性が変化する感温磁性材料からなり、上記永久磁石の近傍で、かつ上記永久磁石よりも上記ロータの軸線方向外側に、上記ロータと間隙を介して上記軸線方向に移動可能に配置され、上記永久磁石が発生する磁束のうち上記ロータから漏れる漏れ磁束により磁化される磁化素子と、上記磁化素子を上記軸線方向外側に付勢する弾性部材と、上記磁化素子の上記軸線方向変位を検知する変位検知手段と、を有する永久磁石温度センサである。
【0016】
本発明の永久磁石温度センサは、磁化素子とこれをロータの軸線方向外側に付勢する弾性部材と変位検知手段とを有する。このうち、磁化素子は永久磁石の近傍に配置すると、漏れ磁束で磁化されてる。つまり、自身も磁石として作用する。しかも、この磁化素子とロータ(永久磁石)との間には間隙があるので、磁化素子は永久磁石に近づく方向(軸線方向内側)に吸引(付勢)される。一方、弾性部材が磁化素子を軸線方向外側(ロータから離れる方向)に付勢しているので、磁化素子は2つの付勢力が均衡する位置に安定することとなる。
ところで、永久磁石の温度が上昇すると、その近傍に位置する磁化素子も温度が上昇する。本発明の磁化素子は、感温磁性材料からなるので、自身の温度変化によって磁気特性が変わるから、磁化素子をロータに近づけようとする付勢力(吸引力)の大きさも変化し、弾性部材による付勢力との均衡位置が変わる。即ち、磁化素子が変位する。そこで、この磁化素子の変位を変位検知手段で検知すれば、磁化素子の温度を知ることができ、間接的に、永久磁石の温度を検知することができる。
しかも、磁化素子は、ロータのうち永久磁石の近傍に配置されているから、ステータの温度から永久磁石の温度を推定する場合よりも、正確に、且つ早い応答で永久磁石の温度を検知することができる。
なお、弾性部材としては、磁化素子をロータの軸線方向外側に付勢することができるものであればよく、バネや、ゴムその他弾性のある樹脂を用いることができる。但し、劣化による弾性係数の変化等を考慮すると、バネ、特に金属製のバネを用いるのが好ましい。さらには、弾性部材が磁化されないように、銅系金属など非磁性体からなる弾性部材を用いるのが好ましい。
【0017】
さらに、上記いずれかに記載の永久磁石温度センサであって、前記磁化素子は、ソフトフェライトからなる永久磁石温度センサとすると良い。
【0018】
本発明のセンサでは、磁化素子がソフトフェライトからなる。ソフトフェライトは、自身の温度が高くなると、飽和磁束密度や透磁率が低下する特性を有している。しかも、磁気変態温度(キュリー点)を有し、キュリー点に近い温度になると、飽和磁束密度や透磁率が急激に低下する。そして、キュリー点を超えると、非磁性材となる。つまり、磁化素子の温度がキュリー点を超えると、磁化素子は磁界を発生しなくなり、永久磁石に吸引されなくなる。
本発明では、磁化素子としてこのようなソフトフェライトを用いているので、磁化素子の温度がキュリー点付近となった場合に、物理量検知手段で検知される物理量や、磁界検知手段で検知される磁界、変位検知手段で検知される変位量が、それぞれ急激に変化する。つまり、磁化素子の温度がキュリー点付近の温度となっていることを、これらの検知手段で、容易に且つ確実に検知することができる。かくして、本発明のセンサでは、磁化素子がキュリー点より十分低い温度であるか、キュリー点付近あるいはキュリー点以上の温度であるかを確実に検知でき、従って、永久磁石が所定温度以下であるか否かを確実に検知することができる。
なお、ソフトフェライトとしては、CuZn系、MnZn系、NiZn系などの軟磁性のフェライトが挙げられる。
【0019】
さらに他の解決手段は、ロータコア及び上記ロータコアに所定の周方向ピッチで配置された複数の永久磁石を有するロータと、ステータと、を備える永久磁石モータであって、自身の温度に応じて磁気特性が変化する感温磁性材料からなり、上記永久磁石の近傍に配置され、上記永久磁石が発生する磁束のうち上記ロータコアから漏れる漏れ磁束により磁化されてなる磁化素子と、上記磁化素子の磁気特性の変化に応じて変化する物理量を検知する物理量検知手段と、を有する永久磁石モータである。
【0020】
本発明のモータは、磁化素子と物理量検知手段を有している。このうち磁化素子は永久磁石の近傍に配置してあるので、永久磁石による漏れ磁束で磁化されている。つまり、自身も磁石として作用しており、磁化素子自身により磁界が生じている。
ところで、モータを駆動等することによって永久磁石の温度が上昇すると、その近傍に位置する磁化素子も温度が上昇する。本発明の磁化素子は、感温磁性材料からなるので、自身の温度変化によって磁気特性が変化する。そこで、磁気特性の変化によって変化する物理量を観測することで、磁化素子の磁気特性の変化、さらには磁化素子の温度を知ることができ、間接的に、永久磁石の温度を検知することができる。
磁化素子は、ロータのうち永久磁石の近傍に配置されているから、ステータの温度から永久磁石の温度を推定する場合よりも、正確に、且つ早い応答で永久磁石の温度を検知することができる。
かくして、物理量検知手段で検知した物理量の大きさから、永久磁石の温度を知ることができる。このため、本発明のモータでは、永久磁石の温度に応じて、永久磁石の減磁が起こらない範囲でこのモータを動作させるように、駆動電流の制御を行うことができる。
【0021】
なお、物理量検知手段は、その全部がロータに固定されるなどして、ロータと共に回転するようにしても良いし、その一部(特に検知した信号を出力する部分)または全部がステータに固定されるなどにより、回転しないようにしても良い。 また、物理量検知手段の全部がロータと共に回転する場合には、検知した物理量に関する信号を外部に取り出すため、ロータに設けたブラシ、スリップリング等を用いたり、あるいは無線通信により信号を取り出したりすることができる。一方、物理量検知手段の一部または全部が回転しないように構成してある場合には、永久磁石の回転に合わせ、適切なタイミングで物理量を検知できるように、ロータの回転と物理量の測定とを同期させるようにすると良い。あるいは、取得した信号に処理を施すなどして、ロータの回転と物理量の測定とが同期していなくとも、適切に物理量を検知できるようにすると良い。例えば、ロータが1回転する間(あるいは所定の時間毎)に、ホール素子で検知した磁界のピーク値の最低値を物理量とすれば、複数の磁化素子及びこれらに対応する各永久磁石がどのような温度になっているかを個別に判定することはできなくとも、永久磁石のうち最も温度の高いものの温度がどの程度であるかを検知することができる。
【0022】
さらに他の解決手段は、ロータコア及び上記ロータコアに所定の周方向ピッチで配置された複数の永久磁石を有するロータと、ステータと、を備える永久磁石モータであって、自身の温度に応じて磁気特性が変化する感温磁性材料からなり、上記永久磁石の近傍に配置され、上記永久磁石が発生する磁束のうち上記ロータコアから漏れる漏れ磁束により磁化されてなる磁化素子と、上記ステータに配置され、上記磁化素子の発生する磁界を検知する磁界検知手段と、を有する永久磁石モータである。
【0023】
本発明のモータは、磁化素子は磁化素子と磁界検知手段とを有している。このうち磁化素子は永久磁石の近傍に配置してあるので、永久磁石による漏れ磁束で磁化されている。つまり、自身も磁石として作用し、磁化素子自身が磁界を発生している。磁界検知手段は、この磁界を検知する。
ところで、モータを駆動等することで永久磁石の温度が上昇すると、その近傍に位置する磁化素子も温度が上昇する。磁化素子は、感温磁性材料からなるので、自身の温度変化によって磁気特性が変わるから、磁化素子が発生する磁界も変化する。従って、磁界検知手段でこの磁界の大きさの変化を観測することで、磁化素子の温度を知ることができ、間接的に、永久磁石の温度を検知することができる。
磁化素子は、ロータのうち永久磁石の近傍に配置されているから、ステータの温度から永久磁石の温度を推定する場合よりも、正確に、且つ早い応答で永久磁石の温度を検知することができる。
かくして、磁界検知手段で検知した磁界の強さから、永久磁石の温度を知ることができる。このため、本発明のモータでは、永久磁石の温度に応じて、その減磁が起こらない範囲でこのモータを動作させるように、制御を行うことができる。
【0024】
さらに他の解決手段は、ロータコア及び上記ロータコアに所定の周方向ピッチで配置された複数の永久磁石を有するロータと、ステータと、を備える永久磁石モータであって、自身の温度により磁気特性が変化する感温磁性材料からなり、上記永久磁石の近傍で、かつ上記永久磁石よりも上記ロータの軸線方向外側に、上記ロータと間隙を介して上記軸線方向に移動可能に配置され、上記永久磁石が発生する磁束のうち上記ロータから漏れる漏れ磁束により磁化されてなる磁化素子と、上記磁化素子を上記軸線方向外側に付勢してなる弾性部材と、上記磁化素子の上記軸線方向変位を検知する変位検知手段と、を有する永久磁石モータである。
【0025】
本発明のモータは、磁化素子と弾性部材と変位検知手段とを有している。このうち磁化素子は永久磁石の近傍に配置してあるので、永久磁石による漏れ磁束で磁化されている。つまり、自身も磁石として作用しており、磁化素子自身により磁界が生じている。しかも、この磁化素子とロータとの間には間隙があるので、磁化素子はロータ(永久磁石)に近づく方向(軸線方向内側)に吸引(付勢)される。一方、弾性部材が磁化素子を軸線方向外側(ロータから離れる方向)に付勢しているので、磁化素子は2つの付勢力が均衡する位置に安定することとなる。
ところで、永久磁石の温度が上昇すると、その近傍に位置する磁化素子も温度が上昇する。磁化素子は、感温磁性材料からなるので、自身の温度変化によって磁気特性が変わるから、磁化素子をロータに近づけようとする付勢力の大きさも変化し、弾性部材による付勢力との均衡位置が変わる。即ち、磁化素子が変位する。そこで、この磁化素子の変位を変位検知手段で検知すれば、磁化素子の温度を知ることができ、間接的に、永久磁石の温度を検知することができる。
しかも、磁化素子は、ロータのうち永久磁石の近傍に配置されているから、ステータの温度から永久磁石の温度を推定する場合よりも、正確に、且つ早い応答で永久磁石の温度を検知することができる。
かくして、変位検知手段で検知した変位量から、永久磁石の温度を知ることができる。このため、本発明のモータでは、永久磁石の温度に応じて、その減磁が起こらない範囲でこのモータを動作させるように、制御を行うことができる。
【0026】
さらに、上記いずれかに記載の永久磁石モータであって、前記磁化素子は、ソフトフェライトからなる永久磁石モータとすると良い。
【0027】
本発明のモータでは、磁化素子がソフトフェライトからなる。ソフトフェライトは、前述したように、キュリー点に近い温度になると、飽和磁束密度や透磁率が急激に低下し、キュリー点を超えると非磁性材となるため、磁化素子の温度がキュリー点を超えると、磁化素子は磁界を発生しなくなり、永久磁石に吸引されなくなる。
従って、本発明では、磁化素子としてソフトフェライトを用いているので、磁化素子の温度がキュリー点付近となった場合に、物理量検知手段で検知される物理量や、磁界検知手段で検知される磁界、変位検知手段で検知される変位量が、それぞれ急激に変化する。つまり、磁化素子の温度がキュリー点付近の温度となっていることを、これらの検知手段で、容易に且つ確実に検知することができる。かくして、本発明のモータでは、磁化素子がキュリー点より十分低い温度であるか、キュリー点付近あるいはキュリー点以上の温度であるかを確実に検知でき、従って、永久磁石が所定温度以下であるか否かを確実に検知することができる。
なお、磁化素子(ソフトフェライト)のキュリー点を永久磁石の減磁が生じる温度より低い温度に設定しておくと良い。上述のように、磁化素子の温度がキュリー点付近であるか否かは確実に検知できるからである。このようにすれば、永久磁石の温度は、磁化素子の温度より高い場合が多いと考えられるので、永久磁石が減磁する前に、モータの制御条件等を変更し、永久磁石の減磁を防止することができる。
【0028】
さらに、上記いずれかに記載の永久磁石モータであって、前記物理量検知手段、磁界検知手段、または、変位検知手段は、少なくともその一部が、前記ロータと共に回転せず、ステータまたは外部装置に固定されてなり、前記ロータの回転角を検知する回転角検知手段を備える永久磁石モータとすると良い。
【0029】
本発明のモータでは、物理量検知手段、磁界検知手段、または変位検知手段は、その全部または一部がステータまたが外部装置に固定されており、ロータと共に回転しない。従って、物理量、磁界、あるいは変位量を検知するに当たり、回転軸の回りに回転する磁化素子及び永久磁石と、検知手段の一部または全部との位置関係を考慮する必要がある。磁化素子や永久磁石が適切な位置に位置するタイミングで物理量、磁界、または変位量を測定するためである。
しかるに、本発明ではさらに、ロータの回転角を検知する回転角検知手段を備える。このため、回転角から、物理量や磁界の強さ、変位量などが適切に測定できるタイミングが判るから、これを用いて、物理量、磁界の強さ、変位量などのデータを各検知手段で得ることができる。従って、より正確に、物理量や磁化素子の磁界の強さ、変位量等を検知することができる。
なお、回転角検知手段としては、公知の手法を用いることができるが、例えば、ロータと共に回転するように設置されたロータリーエンコーダやレゾルバが挙げられる。また、ロータの特定位置に設置した磁石をステータ等に固定したホール素子などの磁気検知素子で検知して回転角を検知するようにしても良い。
【0030】
さらに、上記いずれかに記載の永久磁石モータと、前記物理量検知手段、前記磁界検知手段または変位検知手段の出力に基づいて、前記永久磁石の推定温度を算出する温度算出手段と、前記ステータに形成したコイルに流すコイル電流の電流値を算出するコイル電流算出手段であって、算出した上記永久磁石の磁石温度が所定温度以上であるときには、上記磁石温度が所定温度未満であるとした場合に算出されるコイル電流の電流値よりも小さく、上記永久磁石に減磁が生じない大きさの電流値を算出するコイル電流算出手段と、算出されたコイル電流の電流値に従って、上記コイルに電流を流すコイル電流制御手段と、を備える永久磁石モータの駆動システムとすると良い。
【0031】
本発明の永久磁石モータの駆動システムでは、永久磁石モータのほか、温度算出手段とコイル電流算出手段と、コイル電流制限手段とを有している。温度算出手段で算出した永久磁石の温度が所定温度以上である場合には、永久磁石の減磁を防ぐため、通常(磁石温度が所定値未満であるとした場合)より小さな値となるようにコイル電流の電流値を算出し、これに従ってコイル電流を流す。これにより、永久磁石の減磁を防止し、モータの性能を維持することができる。
【0032】
【発明の実施の形態】
(実施形態1)
本発明の第1の実施形態を、図1〜図6を参照して説明する。図1(a)及び図2に示すモータ1は、ステータ2、ロータ3、及びロータ3を挿通するシャフト4を有する。このうち、ステータ2は、12ヶの内歯部22を有し多数の電磁鋼板を積層してなるステータコア21と、各々の内歯部22に導線を巻回してなる12ヶのステータコイル23(図1では図示しない。図2参照)とを有する。
【0033】
一方、ロータ3は、多数の電磁鋼板を積層してなる、リング状のロータコア31を有する。ロータコア31のうち周縁近傍には、等角度間隔(所定の周方向ピッチ)に配置され、シャフト4の軸線4Xに沿うX方向(図2中上下方向、以下軸線方向、あるいはX方向ともいう)にこのロータコア31を貫通する8ヶのスロット31Sが形成されており、このスロット31S内にその板圧方向に着磁された板状の永久磁石32が挿入、固定されている。さらに、ロータコア31の軸線方向両側には、非磁性材(例えば銅)からなり、このロータコア31を挟むロータエンドプレート33,34が配置されている。ロータコア31及びロータエンドプレート33,34は、シャフト4に圧入され、それらの内周面31N,33N,34Nがシャフト4の外周に密着することによって、各々シャフト4に固定されている。
【0034】
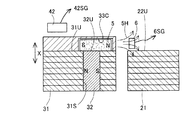
さらに、永久磁石32のうち軸線方向の端面(本例では図2中、上端面32U)及びロータコア31の上面31Uに当接するように、磁化素子5が固定されている。この磁化素子5は、ソフトフェライトからなる。ソフトフェライトの特性を図4に示す。磁化素子は高い透磁率を有しているが、飽和磁束密度や透磁率がその温度によって変化する特性を有している感温磁性材料である。具体的には、温度の上昇と共に、飽和磁束密度が徐々に低下する。しかも、所定の温度(キュリー点)付近の温度になると飽和磁束密度が急激に減少する。そして、温度がキュリー点を超えると、非磁性体となる。なお、図4から容易に理解できるように、キュリー点が異なる磁化素子を適宜選択することができる。
ロータエンドプレート33には、この磁化素子5を収容するための溝部33Cが形成されている。
また、シャフト4には、別途、公知の構成を有し、シャフト4及びロータ3の回転角を検知するためのレゾルバ42が装着されている。
なお、8つの内歯部22のうち1つ内歯部22の上面22Uには、内側端近傍に、ホール素子6が配置固定されている。
【0035】
次いで、このモータ1における永久磁石32の温度計測について説明する。上述したように、磁化素子5はソフトフェライトからなるので、図3に示すように、永久磁石32が発生する磁束のうち、ロータコア31から漏れる漏れ磁束によって永久磁石32とは逆向きに磁化される。このため、磁化素子5自身が磁界5Hを発生する。そこで、磁化素子5が発生する磁界5H中に、ホール素子6を配置すれば、磁界5Hの強さを計測することができる。
ところで、モータ1を駆動することによって、永久磁石32の温度が上昇すると、この永久磁石32の上端面32Uに接する磁化素子5の温度も上昇する。なお、磁化素子5の温度は、磁化素子5が永久磁石32に接していることから、永久磁石32の温度に近い温度になると考えられる。また、永久磁石32の温度が上昇すると、磁化素子5の温度も速やかに追従して昇温すると考えられる。
【0036】
しかるに、前述したように、ソフトフェライトからなる磁化素子5は、その温度が上昇すると飽和磁束密度が低下するから、温度上昇と共に、発生する磁界5Hの強さが低下する。従って、ホール素子6で磁界5Hの強さを計測すれば、磁化素子5の温度、さらには、永久磁石32の温度を推定することができる。
【0037】
ロータ3は回転しているので、ホール素子6から見れば、ロータ3の回転に従って、磁化素子5が近づくと磁界5Hの強さが大きくなり、磁化素子5が遠ざかると磁界5Hの強さも低下する。そして、磁化素子5がホール素子6と正対したときに、磁界5Hの強さは最大になると考えられる。従って、ロータ3の回転角をレゾルバ42で検知し、その回転角信号42SGを用いて磁化素子5がホール素子6と正対するタイミングを割りだし、このタイミングでホール素子6から出力される磁界強度信号6SGを取得するようにする。
このようにすることで、8ヶの永久磁石32それぞれの温度を適切に推定することができる。
【0038】
なお、図4に示すように、磁化素子5として、所望のキュリー点を有するソフトフェライトを選択することができる。従って、磁化素子5を、そのキュリー点が、永久磁石32の減磁が生じる温度よりも若干低い温度となるように選択しておくと良い。永久磁石32の温度が上昇して減磁が生じる温度に近づくと、磁化素子5の温度がキュリー点に近づき、急激に飽和磁束密度が低下するから、ホール素子6によって、容易にその変化を検知することができるからである。
【0039】
次いで、本実施形態1にかかるモータ駆動システム10について説明する。モータ駆動システム10は、上述のモータ1のほか、マイクロコンピュータ11、インバータ12を有する。インバータ12は、バッテリBTから供給される直流電力DCINをインバータ12で3相交流電力に変換してモータ1(ステータコイル23)に供給する。マイクロコンピュータ11は、モータ1の回転数などの動作を指令する動作指令信号ACCに従って、制御信号CTLで、インバータ12を制御する。具体的には、ステータコイル23に流すコイル電流ICLを制御する。
さらに、本実施形態1では、マイクロコンピュータ11は、ステータコア21に設置したホール素子6からの磁界強度信号6SGを取得して、各永久磁石32の温度を推定する。但し、磁化素子5がホール素子6と正対したタイミングで磁界強度信号6SGを取得するため、回転角信号42SGを用いて上述のタイミングに同期して磁界強度信号6SGを取得する。
【0040】
次いで、このモータ駆動システム10のマイクロコンピュータ11における処理の流れを、図5のフローチャートを参照して説明する。このマイクロコンピュータ11の電源が投入され、動作を始めると、まずステップS1で各種の初期設定を行う。その後、ステップS2に進み、レゾルバ42からの回転角信号42SGを取得して、ロータ3の回転角を検知しステップS3に進む。
【0041】
ステップS3では、得られた回転角が所定値であるか否かを判断する。具体的には、回転角が、0度,45度,90度,135度,180度,225度,270度,315度のいずれかであるか否かを判断する。ここで、No、即ち回転角が上述の角度でない場合には、ステップS2に戻り、回転角検知(S2)と回転角の判断(S3)を繰り返す。一方、Yes、即ち回転角が上述の角度となった場合には、ステップS4に進み、磁界5Hの強さを検知する。具体的には、ホール素子6からの磁界強度信号6SGを取得する。
磁界強度信号6SGの取得をステップS3の直後に行ったので、ロータ3の回転角が上述の角度(例えば0度)となったタイミングで、磁界強度信号6SGを得ることができる。
なお、ステップS2における回転角の検知から、ステップS4における磁界強度信号6SGまでの時間経過が問題となる場合には、ステップS3における判断で用いる角度を調整すると良い。
【0042】
次いで、ステップS5に進み、磁界強度信号6SGから永久磁石32の温度を推定する。具体的には、上述したように、磁界強度信号6SGから磁化素子の温度を推定し、さらに永久磁石32の温度を推定する。
さらに、ステップS6に進み、マイクロコンピュータ11に与えられる動作指令信号ACCから、モータ1(ステータコイル23)に流すコイル電流ICLの大きさを算出する。
【0043】
その後、ステップS7に進み、上述のステップS5において推定した永久磁石32の温度が所定値以上であるか否かを判断する。なお、ステップS7では、所定値として、永久磁石32に減磁が起こらない温度を設定しておく。
ここで、No、つまり永久磁石32の温度がそれほど高くない場合には、ステップS9に進み、ステップS6で算出したコイル電流ICLがインバータ12から出力されるように、インバータ12を制御する。
【0044】
一方、Yes、即ち、永久磁石32の温度が所定値を越えている場合には、永久磁石32に減磁が生じる可能性がある。そこで、ステップS8に進んで、一旦ステップS6で算出したコイル電流値を、永久磁石32に減磁が生じない低い値に置き換える。そして、ステップS9に進んで、相対的に抑制された大きさのコイル電流が流れるように、インバータ12を制御する。
かくして、永久磁石32の温度が高くなっている場合でも、コイル電流ICLが抑制されるため、永久磁石32に減磁が生じることが防止される。
【0045】
(実施形態2)
次いで、本発明の第2の実施形態について、図7を参照して説明する。上述した実施形態1では、磁化素子5を永久磁石32の上端面32U及びロータコア31の上面31Uに当接、固定し、磁化素子5の発生する磁界5Hの強さを、ホール素子6によって検知した。これに対し、本実施形態2では、磁化された磁化素子51が永久磁石32に吸引されること、及びこの吸引力が磁化素子51の飽和磁束密度に、従って磁化素子の温度によって変化することを利用して、吸引力の大きさを磁化素子の変位に置き換え、この変位量を検知することで、磁化素子の温度、さらには、永久磁石32の温度を推定する点で異なる。しかし残余の点は、実施形態1と同様であるので、異なる部分を中心に説明し、同様な部分については、記載を省略あるいは簡略化する。
【0046】
本実施形態2にかかるモータ1は、実施形態1に記載のモータ1とほぼ同様の、内歯形状のステータ2及び永久磁石32が周縁近傍に配置されたロータ3を有する(図1参照)。但し、本実施形態2では、ホール素子6は用いない。以降は、図7に示す本実施形態2にかかるモータの要部について説明する。
【0047】
本実施形態2では、ソフトフェライトからなる磁化素子51を永久磁石32の上端面32Uと第1間隙K1を空けて配置する。具体的には、予め磁化素子51を保持プレート8に固着しておく。そして、一端がロータコア31の上面31Uに固着したバネ7で、軸線方向(X方向)で、ロータコア31及び永久磁石32から離れる方向(図7中、上方)に、保持プレート8及び磁化素子51を付勢する。磁化素子51は、永久磁石32の漏れ磁束によって永久磁石32とは逆向きに磁化される。このため、磁化素子51は、永久磁石32に吸引される。この吸引力は、磁化素子51及び保持プレートを、軸線方向(X方向)で、ロータコア31及び永久磁石32に近づける方向(図7中、下方)に働く。従って、バネ7の付勢力と永久磁石32による吸引力とが均衡する位置で、磁化素子51及び保持プレート8が安定する。この保持プレート8の位置を、変位計9によって測定する。変位計9はレーザ式変位計であり、モータ1の筐体など、回転しない部材(図示しない)に変位計保持ブラケット91を介して保持されており、変位計9から保持プレートまでの距離K2を測定する。
【0048】
なお、バネ7には、銅系金属などの非磁性材を用いるのが好ましい。また、磁化素子51、バネ7、保持プレート8は、ロータエンドプレート35にこれを貫通して形成された保持孔35S内に配置されている。保持孔35Sには、磁化素子51、バネ7、保持プレート8が保持孔35S内から飛び出すのを防止するため、保持プレート8が図7中上方に大きく移動したときに係合する配置で形成された突出部35Tを有している。
【0049】
ところで、このモータ1を駆動することによって、永久磁石32の温度が上昇すると、この近傍に位置する磁化素子51にも熱が伝わるので、磁化素子51の温度も上昇する。前述したように、磁化素子の温度が上昇すると、ソフトフェライトからなる磁化素子51の飽和磁束密度は減少するので、永久磁石32による吸引力が低下する。すると、バネ7の付勢力が優勢になり、磁化素子51及び保持プレート8は、図7において上方に移動した状態で安定する。つまり、永久磁石32の温度が上昇すると、磁化素子51と保持プレート8が図7における上方に変位する。従って、保持プレート8の変位(距離K2の変化)を変位計9で計測することで、磁化素子51の温度、さらには、永久磁石32の温度を推定することができる。
【0050】
具体的には、図5において破線で示すように、変位計9によって得られる測距信号9SGを、実施形態1における磁界強度信号6SGと同様に、マイクロコンピュータ11に入力するようにすればよい。そして、図6に示すフローチャートにおいて、ステップS4で磁界の強さ検知に代えて変位計9による距離検知を行い、ステップS5において、距離K2の変化から永久磁石32の温度を推定する。かくして、本実施形態2のモータ駆動システム10においても、永久磁石32の減磁が生じないように、モータ1を駆動することができる。
【0051】
以上において、本発明を実施形態1,2に即して説明したが、本発明は上記実施形態に限定されるものではなく、その要旨を逸脱しない範囲で、適宜変更して適用できることはいうまでもない。
例えば、実施形態2においては、変位計9として、レーザ式変位計を用いたが、保持プレート8の変位を測定できるものであれば良く、静電容量式、超音波式など、各種の測定方式による変位計を採用することができる。
また、実施形態1,2においては、ホール素子6あるいは変位計9を回転しないステータ2その他に固定した。このため、磁界強度信号や測距信号をモータ外に容易に取り出すことができた。しかし、磁界の強さや磁化素子の変位を測定できれば、ホール素子や変位計をロータ内に配置しても良い。但し、この場合には、磁界強度信号や測距信号をモータ(ロータ)外に取り出すために、ブラシやスリップリングなどを用いたり、無線通信を行う必要がある。
実施形態1,2においては、磁化素子の温度変化に伴って生じる磁界の強さや、保持プレートの距離変化を物理量として検知し、これを用いて永久磁石の温度を推定した。しかし、磁化素子の磁気特性の変化に応じて物理量が変化するようにしておけば、いずれの物理量を用いて永久磁石の温度を推定しても良い。
【図面の簡単な説明】
【図1】実施形態1にかかるモータの概要を説明する説明図であり、(a)はシャフトの軸線方向からステータ及びロータを見た状態を示し、(b)はエンドプレートを示す。但し、(a)においてロータはエンドプレートを外した状態であり、ステータは内歯に巻いたコイルを省略した状態について示す。
【図2】実施形態1にかかるモータのO−A縦断面図である。
【図3】実施形態1にかかり、磁化素子が発生する磁界とホール素子との関係を示す説明図である。
【図4】磁化素子(感温性磁性材料)の温度と飽和磁束密度の関係を示す説明図である。
【図5】実施形態1,2にかかるモータ駆動システムの概要を示す説明図である。
【図6】実施形態1,2にかかるモータの駆動制御の内容を示すフローチャートである。
【図7】実施形態2にかかり、磁化素子と弾性部材と変位検知手段との関係を示す説明図である。
【符号の説明】
1 モータ
10 モータ駆動システム
12 インバータ(コイル電流制御手段)
ICL コイル電流
2 ステータ
21 ステータコア
22 内歯部
22U 上面
23 ステータコイル
3 ロータ
31 ロータコア
32 永久磁石
33,34,35 ロータエンドプレート
4 シャフト
X 軸線方向、X方向
42 レゾルバ(回転角検知手段)
42SG 回転角信号
5,51 磁化素子
5H (磁化素子による)磁界
6 ホール素子(磁界検知手段、物理量検知手段)
6SG 磁界強度信号
7 バネ(弾性部材)
8 保持プレート(変位検知手段、物理量検知手段)
9 変位計(変位検知手段、物理量検知手段)
9SG 測距信号
91 変位計保持ブラケット
K1 (永久磁石と磁化素子との)第1間隙
K2 (変位計から保持プレートまでの)距離
Claims (10)
- ロータコアに所定の周方向ピッチで複数の永久磁石を配置したロータを有する永久磁石モータにおける上記永久磁石の温度を検知する永久磁石温度センサであって、
自身の温度に応じて磁気特性が変化する感温磁性材料からなり、上記永久磁石の近傍に配置され、上記永久磁石が発生する磁束のうち上記ロータコアから漏れる漏れ磁束により磁化される磁化素子と、
上記磁化素子の磁気特性変化に応じて変化する物理量を検知する物理量検知手段と、
を有する永久磁石温度センサ。 - ロータコアに所定の周方向ピッチで複数の永久磁石を配置したロータを有する永久磁石モータにおける上記永久磁石の温度を検知する永久磁石温度センサであって、
自身の温度に応じて磁気特性が変化する感温磁性材料からなり、上記永久磁石の近傍に配置されて、上記永久磁石が発生する磁束のうち上記ロータコアから漏れる漏れ磁束により磁化される磁化素子と、
ステータに配置されて、上記磁化素子の発生する磁界を検知する磁界検知手段と、
を有する永久磁石温度センサ。 - ロータコアに所定の周方向ピッチで複数の永久磁石を配置したロータを有する永久磁石モータにおける上記永久磁石の温度を検知する永久磁石温度センサであって、
自身の温度に応じて磁気特性が変化する感温磁性材料からなり、上記永久磁石の近傍で、かつ上記永久磁石よりも上記ロータの軸線方向外側に、上記ロータと間隙を介して上記軸線方向に移動可能に配置され、上記永久磁石が発生する磁束のうち上記ロータから漏れる漏れ磁束により磁化される磁化素子と、
上記磁化素子を上記軸線方向外側に付勢する弾性部材と、
上記磁化素子の上記軸線方向変位を検知する変位検知手段と、
を有する永久磁石温度センサ。 - 請求項1〜請求項3のいずれか1項に記載の永久磁石温度センサであって、
前記磁化素子は、ソフトフェライトからなる
永久磁石温度センサ。 - ロータコア及び上記ロータコアに所定の周方向ピッチで配置された複数の永久磁石を有するロータと、
ステータと、
を備える永久磁石モータであって、
自身の温度に応じて磁気特性が変化する感温磁性材料からなり、上記永久磁石の近傍に配置され、上記永久磁石が発生する磁束のうち上記ロータコアから漏れる漏れ磁束により磁化されてなる磁化素子と、
上記磁化素子の磁気特性の変化に応じて変化する物理量を検知する物理量検知手段と、
を有する永久磁石モータ。 - ロータコア及び上記ロータコアに所定の周方向ピッチで配置された複数の永久磁石を有するロータと、
ステータと、
を備える永久磁石モータであって、
自身の温度に応じて磁気特性が変化する感温磁性材料からなり、上記永久磁石の近傍に配置され、上記永久磁石が発生する磁束のうち上記ロータコアから漏れる漏れ磁束により磁化されてなる磁化素子と、
上記ステータに配置され、上記磁化素子の発生する磁界を検知する磁界検知手段と、
を有する永久磁石モータ。 - ロータコア及び上記ロータコアに所定の周方向ピッチで配置された複数の永久磁石を有するロータと、
ステータと、
を備える永久磁石モータであって、
自身の温度により磁気特性が変化する感温磁性材料からなり、上記永久磁石の近傍で、かつ上記永久磁石よりも上記ロータの軸線方向外側に、上記ロータと間隙を介して上記軸線方向に移動可能に配置され、上記永久磁石が発生する磁束のうち上記ロータから漏れる漏れ磁束により磁化されてなる磁化素子と、
上記磁化素子を上記軸線方向外側に付勢してなる弾性部材と、
上記磁化素子の上記軸線方向変位を検知する変位検知手段と、
を有する永久磁石モータ。 - 請求項5〜請求項7のいずれか1項に記載の永久磁石モータであって、
前記磁化素子は、ソフトフェライトからなる
永久磁石モータ。 - 請求項5〜請求項8のいずれか1項に記載の永久磁石モータであって、
前記物理量検知手段、磁界検知手段、または、変位検知手段は、少なくともその一部が、前記ロータと共に回転せず、ステータまたは外部装置に固定されてなり、
前記ロータの回転角を検知する回転角検知手段を備える
永久磁石モータ。 - 請求項5〜請求項9のいずれか1項に記載の永久磁石モータと、
前記物理量検知手段、前記磁界検知手段または変位検知手段の出力に基づいて、前記永久磁石の推定温度を算出する温度算出手段と、
前記ステータに形成したコイルに流すコイル電流の電流値を算出するコイル電流算出手段であって、算出した上記永久磁石の磁石温度が所定温度以上であるときには、上記磁石温度が所定温度未満であるとした場合に算出されるコイル電流の電流値よりも小さく、上記永久磁石に減磁が生じない大きさの電流値を算出するコイル電流算出手段と、
算出されたコイル電流の電流値に従って、上記コイルに電流を流すコイル電流制御手段と、
を備える永久磁石モータの駆動システム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003005398A JP4165229B2 (ja) | 2003-01-14 | 2003-01-14 | 永久磁石温度センサ、永久磁石モータ、永久磁石モータの駆動システム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003005398A JP4165229B2 (ja) | 2003-01-14 | 2003-01-14 | 永久磁石温度センサ、永久磁石モータ、永久磁石モータの駆動システム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2004222387A JP2004222387A (ja) | 2004-08-05 |
| JP4165229B2 true JP4165229B2 (ja) | 2008-10-15 |
Family
ID=32896060
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2003005398A Expired - Fee Related JP4165229B2 (ja) | 2003-01-14 | 2003-01-14 | 永久磁石温度センサ、永久磁石モータ、永久磁石モータの駆動システム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4165229B2 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN105424215A (zh) * | 2014-09-12 | 2016-03-23 | 罗伯特·博世有限公司 | 对电的机器的转子温度进行测量 |
| KR20210157561A (ko) * | 2020-06-22 | 2021-12-29 | 현대자동차주식회사 | 차량용 구동모터 |
Families Citing this family (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE502008003332D1 (de) | 2007-05-14 | 2011-06-09 | Ebm Papst St Georgen Gmbh & Co | Elektronisch kommutierter Asynchronmotor |
| JP2009303403A (ja) * | 2008-06-13 | 2009-12-24 | Nissan Motor Co Ltd | 発電機の制御装置及び制御方法 |
| CN102624323B (zh) * | 2011-01-31 | 2014-02-26 | 上海捷能汽车技术有限公司 | 一种实现在线估算永磁电机转子磁钢温度的方法 |
| JP5707195B2 (ja) | 2011-03-24 | 2015-04-22 | 株式会社神戸製鋼所 | モータの温度推定装置並びにこれを備えた発電システム及びモータの温度推定方法 |
| JP5895578B2 (ja) * | 2012-02-15 | 2016-03-30 | Tdk株式会社 | 非接触温度センサ |
| JP6095004B2 (ja) * | 2013-08-08 | 2017-03-15 | 日立オートモティブシステムズ株式会社 | 回転電機制御装置 |
| US9602043B2 (en) * | 2014-08-29 | 2017-03-21 | General Electric Company | Magnet management in electric machines |
| JP6939474B2 (ja) * | 2017-11-28 | 2021-09-22 | トヨタ自動車株式会社 | モータ |
| JP7056218B2 (ja) * | 2018-02-23 | 2022-04-19 | 株式会社デンソー | モータ |
| EP3556699A1 (en) | 2018-04-19 | 2019-10-23 | KONE Corporation | A monitoring solution for a conveyor system |
| JP7040335B2 (ja) * | 2018-07-24 | 2022-03-23 | トヨタ自動車株式会社 | モータの制御方法 |
| JP7339802B2 (ja) * | 2019-07-22 | 2023-09-06 | ジヤトコ株式会社 | 回転電機のセンサ構造 |
| JP7342536B2 (ja) * | 2019-09-04 | 2023-09-12 | Tdk株式会社 | 磁石温度情報出力装置及び回転電機 |
| WO2021199419A1 (ja) * | 2020-04-03 | 2021-10-07 | 三菱電機株式会社 | 電動機、圧縮機、及び空気調和機 |
| IT202100012575A1 (it) * | 2021-05-17 | 2022-11-17 | Eldor Corp Spa | Metodo di stima della temperatura di magnete in una macchina elettrica, un metodo di controllo di detta macchina elettrica, dispositivo elettronico per la stima della temperatura di magnete in una macchina elettrica e sistema di controllo per detta macchina elettrica |
| CN113258727B (zh) * | 2021-06-01 | 2022-05-03 | 广东威灵电机制造有限公司 | 电机及家用电器 |
| WO2023248777A1 (ja) * | 2022-06-22 | 2023-12-28 | 日立Astemo株式会社 | ブラシレスモータ |
-
2003
- 2003-01-14 JP JP2003005398A patent/JP4165229B2/ja not_active Expired - Fee Related
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN105424215A (zh) * | 2014-09-12 | 2016-03-23 | 罗伯特·博世有限公司 | 对电的机器的转子温度进行测量 |
| KR20210157561A (ko) * | 2020-06-22 | 2021-12-29 | 현대자동차주식회사 | 차량용 구동모터 |
| KR102791573B1 (ko) | 2020-06-22 | 2025-04-03 | 현대자동차주식회사 | 차량용 구동모터 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2004222387A (ja) | 2004-08-05 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4165229B2 (ja) | 永久磁石温度センサ、永久磁石モータ、永久磁石モータの駆動システム | |
| JP7342536B2 (ja) | 磁石温度情報出力装置及び回転電機 | |
| JP4520507B2 (ja) | 遠隔ホール検知を用いるブラシレス直流モータおよびそれを製造する方法 | |
| JP2001298932A (ja) | 電動機の磁極位置検出装置 | |
| Ito et al. | Electromagnetic force acquisition distributed in electric motor to reduce vibration | |
| JP2005192325A (ja) | 永久磁石電動機の減磁検出方法 | |
| US8466648B2 (en) | Motor control device and out-of-step detecting method | |
| JP6213407B2 (ja) | モータのトルクを推定する方法及び装置 | |
| KR20010050733A (ko) | 자기 투자율을 이용한 위치 검출기 | |
| US7518332B2 (en) | Brushless synchronous motor and driving control apparatus therefor | |
| CN115987030A (zh) | 无刷电机和无刷电机转子位置检测方法 | |
| JPH09304345A (ja) | 磁気ヘッド装置 | |
| KR101268973B1 (ko) | 전기 기기 | |
| JP5255345B2 (ja) | コギングトルクの測定方法及びコギングトルク測定装置 | |
| CN109617504A (zh) | 一种防退磁的系统及方法 | |
| JP2017078687A (ja) | 永久磁石式回転電機の無負荷損失の測定方法、および測定装置 | |
| JP4668046B2 (ja) | 回転位置検出装置の位相調整方法および回転位置検出装置の位相検出装置 | |
| JP2009027799A (ja) | 円筒形同期電動機システム、並びに円筒形同期電動機の磁極位置検出方法およびその駆動方法 | |
| CN117713626A (zh) | 永磁辅助同步磁阻电机零或低速控制系统及方法 | |
| JP2004229436A (ja) | 永久磁石劣化センサ、永久磁石モータ | |
| JP4714445B2 (ja) | 永久磁石型電動機の着磁方法および装置 | |
| CN105807150B (zh) | 永磁取向环检测系统及方法 | |
| WO2020084810A1 (ja) | 筒型リニアモータ | |
| KR100997538B1 (ko) | 속도센서용 마그네트의 착자방법 | |
| JP2014027705A (ja) | 回転機 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20050804 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20080229 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20080401 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20080708 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20080721 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110808 Year of fee payment: 3 |
|
| LAPS | Cancellation because of no payment of annual fees |