JP4166684B2 - 車両安定性向上システムのための方法及び装置 - Google Patents
車両安定性向上システムのための方法及び装置 Download PDFInfo
- Publication number
- JP4166684B2 JP4166684B2 JP2003433653A JP2003433653A JP4166684B2 JP 4166684 B2 JP4166684 B2 JP 4166684B2 JP 2003433653 A JP2003433653 A JP 2003433653A JP 2003433653 A JP2003433653 A JP 2003433653A JP 4166684 B2 JP4166684 B2 JP 4166684B2
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- steering
- control
- response
- torque
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images






Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T8/00—Arrangements for adjusting wheel-braking force to meet varying vehicular or ground-surface conditions, e.g. limiting or varying distribution of braking force
- B60T8/17—Using electrical or electronic regulation means to control braking
- B60T8/1755—Brake regulation specially adapted to control the stability of the vehicle, e.g. taking into account yaw rate or transverse acceleration in a curve
- B60T8/17555—Brake regulation specially adapted to control the stability of the vehicle, e.g. taking into account yaw rate or transverse acceleration in a curve specially adapted for enhancing driver or passenger comfort, e.g. soft intervention or pre-actuation strategies
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G17/00—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load
- B60G17/015—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load the regulating means comprising electric or electronic elements
- B60G17/0195—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load the regulating means comprising electric or electronic elements characterised by the regulation being combined with other vehicle control systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/02—Control of vehicle driving stability
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D6/00—Arrangements for automatically controlling steering depending on driving conditions sensed and responded to, e.g. control circuits
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D6/00—Arrangements for automatically controlling steering depending on driving conditions sensed and responded to, e.g. control circuits
- B62D6/04—Arrangements for automatically controlling steering depending on driving conditions sensed and responded to, e.g. control circuits responsive only to forces disturbing the intended course of the vehicle, e.g. forces acting transversely to the direction of vehicle travel
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G2800/00—Indexing codes relating to the type of movement or to the condition of the vehicle and to the end result to be achieved by the control action
- B60G2800/85—System Prioritisation
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G2800/00—Indexing codes relating to the type of movement or to the condition of the vehicle and to the end result to be achieved by the control action
- B60G2800/90—System Controller type
- B60G2800/92—ABS - Brake Control
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G2800/00—Indexing codes relating to the type of movement or to the condition of the vehicle and to the end result to be achieved by the control action
- B60G2800/90—System Controller type
- B60G2800/94—Electronic Stability Program (ESP, i.e. ABS+ASC+EMS)
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G2800/00—Indexing codes relating to the type of movement or to the condition of the vehicle and to the end result to be achieved by the control action
- B60G2800/90—System Controller type
- B60G2800/96—ASC - Assisted or power Steering control
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T2260/00—Interaction of vehicle brake system with other systems
- B60T2260/02—Active Steering, Steer-by-Wire
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Transportation (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Automation & Control Theory (AREA)
- Steering Control In Accordance With Driving Conditions (AREA)
- Regulating Braking Force (AREA)
- Vehicle Body Suspensions (AREA)
Description
図1は車両10の概略図であり、車両10は、シャーシ20、シャーシ20上に配置した車体30、シャーシ20に回転可能に結合された1組の車輪(“W”)40、車輪40を操作するようになされたステアリング機構50、コマンドにより車輪40を減速するようにされた制動機構(“B”)60、前記車輪40とシャーシ20との間に配置されて車輪40での振動を減衰するサスペンション機構(“S”)70、ドライバに指令されたステアリング・トルクをステアリング機構50へ伝達すると共に、ドライバにステアリング機構50に関する触感フィードバックを提供するハンドル80、及び、統合シャーシ制御システム(ICCS)100を備える。ステアリング機構50、制動機構60及びサスペンション機構70は車両サブシステムと呼ばれる。
本発明を実施するに当って使用される術語は下記の変数を含む。
Vx=車速(毎時キロメータ、kph)
δ=舵角
L=車両ホイールベース
Ku=アンダーステア係数
fn=周波数係数、例えば、2Hz
ζ=減衰係数、例えば、0.707
P_term=比例−微分制御理論で使用される比例項
D_term=比例−微分理論で使用される微分項
Kp=例えば、下に示すルックアップ・テーブル1からの比例利得係数(ニュートン*メートル/度/秒)
Kd=例えばルックアップ・テーブル1からの微分利得係数(ニュートン*メートル/度/秒2)
Ycommand=ドライバ入力に基づくヨーレート・コマンド(度/秒)
Yaw=車両の実際のヨーレート(毎秒度、度/秒)
T=制御サンプリング時間、例えば10ミリ秒(msec)
k=制御サンプリング時間
Ye=車両ヨーレート誤差(度/秒)
Ye(k)=時間ステップkでの車両ヨーレート誤差
Ye_est=予測された車両ヨーレート誤差
Ye_est(k)=時間ステップkでの予測された車両ヨーレート誤差
Ye_est(k―1)=時間ステップ(k−1)での予測された車両ヨーレート誤差
VSE_WFlag=VSE車輪フラグ(制御フラグ)であり、VSEシステム制御下で制動状態を経験している右前輪及び右後輪では(+1)であり、VSEシステム制御下で制動状態を経験している左前輪及び左後輪では(−1)である
STA_FB=ステアリング・トルク・アシスト・フィードバック・トルク(ニュートン*メートル)、(N*m)
STA_FF=例えば、図6のグラフからのステアリング・トルク・アシスト・フィードフォワード・トルク(N*m)
STorque=ステアリング・トルク・センサからのステアリング・トルク(N*m)。

コントローラ200は、マイクロプロセッサをベースにした制御システムであって、シャーシ・サブシステムの統合されたセットを能動的に制御する。より詳細には、コントローラ200は、ここに記載する制御論理に従ってステアリング機構50に対するステアリング・トルク・アシストを能動的に提供する。典型的には、コントローラ200は、マイクロプロセッサ、ROM及びRAM、並びに、種々の入力信号を受信すると共に様々なアクチュエータ及び制御システムに対して種々の制御コマンドを出力する公知の形式の適切な入力及び出力回路を含む。コントローラ200により実行される制御論理は制御サンプリング・レートTで繰り返され、図3〜図6を参照すると最も良く理解できる。
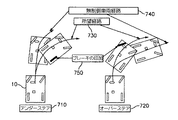
VSE_WFlag及びSTA_FFの符号の正負は、図7を参照すると最も良く理解できる。図7は、VSEシステムが作動した場合(ブロック730)及びVSEシステムが作動しない場合(ブロック740)における、アンダーステア状態710及びオーバーステア状態720に応答する車両10の動作を一般化した図である。
Claims (16)
- 少なくとも1つの車両サブシステムを定義する、ステアリング機構及び制動機構を備える車両のための車両安定性向上システムにおいて、
車両ヨーレートを感知するためのヨー・センサと、前記車両の速度を感知するための速度センサと、前記車両のステアリング角を感知するためのステアリング角センサと、前記ステアリング機構におけるトルクを感知するためのステアリング・トルク・センサとのうちのそれぞれに関連する少なくとも1つの車両パラメータを感知する、これらの前記センサのうちの少なくとも1つのセンサと、
前記少なくとも1つの車両サブシステムのうちの1つと関連する車両サブシステムを調節するための少なくとも1つの車両制御システムを定義する、ステアリング機構制御システム及び制動機構制御システムと、
少なくとも1組の利得係数を備える少なくとも1つのメモリと、
前記少なくとも1つのセンサと前記少なくとも1組の利得係数とに応答して、前記少なくとも1つの車両制御システムを制御するための出力制御コマンドを生成するマイクロプロセッサ型コントローラと、
を具備し、前記制動機構制御システムが、
前記コントローラによって制御されている制動状態に応答する前記制動機構制御システムの状態を示すための車輪制御フラグと、
前記車両の速度と前記ステアリング機構におけるトルクとに応答する第1のステアリング・トルク・アシスト出力と、
前記車両の速度と前記ステアリング角と前記ヨーレートと前記車輪制御フラグとに応答する第2のステアリング・トルク・アシスト出力と、
を備える車両安定性向上システム。 - 請求項1記載の車両安定性向上システムであって、前記車輪制御フラグが、右側車輪に対しては正の、左側車輪に対しては負の値を持つ車両安定性向上システム。
- 請求項2記載の車両安定性向上システムであって、前記ステアリング機構制御システムが、前記少なくとも1つのセンサからの信号及び前記車輪制御フラグに応答するアクチュエータを備える車両安定性向上システム。
- 請求項記載3の車両安定性向上システムであって、前記アクチュエータが電気モータを備える車両安定性向上システム。
- 請求項1記載の車両安定性向上システムであって、前記少なくとも1組の利得係数が、前記車両の速度に応答する比例利得係数及び微分利得係数を備える車両安定性向上システム。
- 請求項1記載の車両安定性向上システムであって、前記少なくとも1つの車両制御システムが、前記第1のステアリング・トルク・アシスト・コマンド及び前記第2のステアリング・トルク・アシスト・コマンドに応答するトルク・アシスト・コマンドを更に含む車両安定性向上システム。
- 請求項6記載の車両安定性向上システムであって、前記トルク・アシスト・コマンドの値が、前記アクチュエータを第1の方向へ作動する場合には正であり、前記アクチュエータを第2の方向へ作動する場合には負である車両安定性向上システム。
- 請求項6記載の車両安定性向上システムであって、前記トルク・アシスト・コマンドの値が、前記ステアリング機構のトルクが増大するにつれて増大し、前記トルク・アシスト・コマンドの値が、前記車両の速度が増大するにつれて減少する車両安定性向上システム。
- 請求項1記載の車両安定性向上システムであって、前記ステアリング機構制御システムが、前記車輪制御フラグに応答するステアリング・アシスト・アクチュエータを備える車両安定性向上システム。
- 請求項9記載の車両安定性向上システムであって、前記ステアリング・アシスト・アクチュエータが、前記車両のオペレータに向けた触感フィードバックを生成することができる車両安定性向上システム。
- 少なくとも1つの車両サブシステムを定義する、ステアリング機構及び制動機構を備える車両において、車両安定性向上システムを能動的に制御する方法であって、
前記車両のヨーレート、前記車両の速度、前記車両のステアリング角及び前記ステアリング機構におけるトルクのうちの少なくとも1つを感知して、少なくとも1つの車両パラメータを感知する段階と、
前記少なくとも1つの車両パラメータに応答して少なくとも1つの制御利得係数を決定する段階と、
前記制動機構に関連する制動機構制御システムの動作に応答して、メモリに記憶された制御フラグの状態を決定する段階と、
前記少なくとも1つの制御利得係数及び前記制御フラグに応答して、マイクロプロセッサ型コントローラによって少なくとも1つの制御コマンドを計算する段階と、
前記少なくとも1つの制御コマンドに応答して、前記少なくとも1つの車両サブシステムの触感作動を提供する段階と、
を備え、
前記制御フラグの状態を決定する前記段階が、電子制御車両安定性向上車輪制動状態に応答して車両安定性向上車輪フラグを決定する段階を含み、
少なくとも1つの制御利得係数を決定する前記段階が、前記少なくとも1つの車両パラメータに応答して比例利得係数と微分利得係数とを決定する段階を含む制御方法。 - 請求項11記載の制御方法であって、前記少なくとも1つの車両サブシステムの触感作動を提供する前記段階が、前記ステアリング機構の触感作動を提供する段階を更に備える制御方法。
- 請求項11記載の制御方法であって、比例利得係数及び微分利得係数を決定する前記段階が、前記比例利得係数及び前記微分利得係数を決定するルックアップ・テーブルにアクセスする段階を更に備え、前記比例利得係数及び前記微分利得係数が前記車両の速度に応答する制御方法。
- 請求項12記載の制御方法であって、前記少なくとも1つの制御コマンドを計算する前記段階が、
前記車両の速度と前記ステアリング機構におけるトルクとに応答して第1のステアリング・トルク・アシスト出力を計算する段階と、
前記車両の速度と前記ステアリング角と前記ヨーレートと前記車両安定性向上車輪フラグの状態とに応答して第2のステアリング・トルク・アシスト出力を計算する段階と、
前記第1のステアリング・トルク・アシスト出力及び前記第2のステアリング・トルク・アシスト出力に応答してトルク・アシスト・コマンドを計算する段階と、
を更に備える制御方法。 - 請求項14記載の制御方法であって、前記車両ステアリング機構の触感作動を提供する前記段階が、アクチュエータを、正のトルク・アシスト・コマンドに応答して第1の方向へ作動させ、負のトルク・アシスト・コマンドに応答して第2の方向へ作動させる段階を更に備える制御方法。
- 請求項15記載の制御方法であって、前記アクチュエータを作動させる段階が、電気モータを作動させる段階を更に備える制御方法。
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US10/336,252 US6968261B2 (en) | 2003-01-03 | 2003-01-03 | Method and apparatus for vehicle stability enhancement system |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2004210270A JP2004210270A (ja) | 2004-07-29 |
| JP4166684B2 true JP4166684B2 (ja) | 2008-10-15 |
Family
ID=32507408
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2003433653A Expired - Fee Related JP4166684B2 (ja) | 2003-01-03 | 2003-12-26 | 車両安定性向上システムのための方法及び装置 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US6968261B2 (ja) |
| EP (1) | EP1435318B1 (ja) |
| JP (1) | JP4166684B2 (ja) |
| DE (1) | DE60317451T2 (ja) |
Families Citing this family (30)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4294389B2 (ja) * | 2003-06-18 | 2009-07-08 | 本田技研工業株式会社 | 車両用操舵装置 |
| US8380416B2 (en) | 2004-03-18 | 2013-02-19 | Ford Global Technologies | Method and apparatus for controlling brake-steer in an automotive vehicle in reverse |
| US7165644B2 (en) * | 2004-03-18 | 2007-01-23 | Ford Global Technologies, Llc | Method and apparatus of controlling an automotive vehicle using brake-steer as a function of steering wheel torque |
| SE526936C2 (sv) * | 2004-04-01 | 2005-11-22 | A2 Acoustics Ab | Anordning för vibrationsstyrning i motorfordon på så sätt att önskad vibrationskaraktär i ratten erhålles |
| US7502675B2 (en) * | 2004-04-01 | 2009-03-10 | Delphi Technologies, Inc. | Feedforward control of motor vehicle roll angle |
| JP4453514B2 (ja) * | 2004-06-09 | 2010-04-21 | 日産自動車株式会社 | 車両用運転操作補助装置および車両用運転操作補助装置を備えた車両 |
| JP2006060936A (ja) * | 2004-08-20 | 2006-03-02 | Denso Corp | 車両挙動制御システム |
| US7191047B2 (en) | 2004-09-27 | 2007-03-13 | Delphi Technologies, Inc. | Motor vehicle control using a dynamic feedforward approach |
| KR100675480B1 (ko) * | 2005-06-13 | 2007-01-29 | 주식회사 만도 | 전자제어 현가장치 |
| US7747359B2 (en) * | 2005-06-20 | 2010-06-29 | Gm Global Technology Operations, Inc. | Vehicle state determination integrity |
| US7684911B2 (en) * | 2005-06-20 | 2010-03-23 | Gm Global Technology Operations, Inc. | Suspension control calibration integrity |
| US7706941B2 (en) * | 2006-07-20 | 2010-04-27 | Gm Global Technology Operations, Inc. | Method and system for coordinating a vehicle stability control system with a suspension damper control sub-system |
| JP5037156B2 (ja) * | 2006-09-26 | 2012-09-26 | 株式会社ジェイテクト | 電動パワーステアリング装置 |
| US8566375B1 (en) * | 2006-12-27 | 2013-10-22 | The Mathworks, Inc. | Optimization using table gradient constraints |
| US20120150376A1 (en) * | 2010-12-14 | 2012-06-14 | Amp Electric Vehicles Inc. | Independent control of drive and non-drive wheels in electric vehicles |
| USD689794S1 (en) | 2011-03-21 | 2013-09-17 | Polaris Industries Inc. | Three wheeled vehicle |
| US8544587B2 (en) | 2011-03-21 | 2013-10-01 | Polaris Industries Inc. | Three wheeled vehicle |
| US8996250B2 (en) * | 2011-09-09 | 2015-03-31 | Steering Solutions Ip Holding Corporation | Inertia compensation with frequency dependent damping |
| JP6036538B2 (ja) * | 2013-05-15 | 2016-11-30 | 株式会社ジェイテクト | 電動パワーステアリング装置 |
| DE102014200299A1 (de) * | 2013-07-31 | 2015-02-05 | Robert Bosch Gmbh | Verfahren und Vorrichtung zum Betreiben eines Fahrzeugs, Computerprogramm, Computer-Programmprodukt |
| KR101491391B1 (ko) * | 2013-12-30 | 2015-02-06 | 현대자동차주식회사 | 자동차의 주행 경로 이탈 감지 방법 |
| US9481256B2 (en) | 2014-01-30 | 2016-11-01 | Amp Electric Vehicles Inc. | Onboard generator drive system for electric vehicles |
| US9821837B2 (en) * | 2014-07-31 | 2017-11-21 | Nsk Ltd. | Electric power steering apparatus |
| DE102016010849A1 (de) * | 2016-09-07 | 2018-03-08 | Institut für Kraftfahrzeuge - RWTH Aachen University | Stellteil und Steuerung für ein Kraftfahrzeug |
| WO2020150522A1 (en) * | 2019-01-16 | 2020-07-23 | ClearMotion, Inc. | Method and apparatus for the dynamic control of the suspension system of a vehicle |
| US11396287B2 (en) | 2020-02-14 | 2022-07-26 | GM Global Technology Operations LLC | Architecture and methodology for real-time target wheel slip identification to optimally manage wheel stability and vehicle lateral grip |
| US11338796B1 (en) | 2020-12-17 | 2022-05-24 | GM Global Technology Operations LLC | Apparatus and methodology for wheel stability monitoring system |
| US11318924B1 (en) | 2021-01-11 | 2022-05-03 | GM Global Technology Operations LLC | Torque distribution system for redistributing torque between axles of a vehicle |
| US11702133B2 (en) | 2021-04-21 | 2023-07-18 | GM Global Technology Operations LLC | Yaw stability control system for a motor vehicle |
| USD1032429S1 (en) | 2021-12-06 | 2024-06-25 | Polaris Industries Inc. | Vehicle bonnet |
Family Cites Families (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5153946A (en) * | 1990-02-27 | 1992-10-13 | Calvin Yoke W | Apparatus and method for automatically closing a toilet bowl lid and seat |
| EP0499027A3 (en) | 1991-01-10 | 1993-03-17 | Nsk Ltd | Four-wheel steering apparatus |
| US5524079A (en) | 1992-09-01 | 1996-06-04 | Matsushita Electric Industrial Co., Ltd. | Rear wheel steering angle controlling apparatus of four-wheel steering vehicle |
| US5667286A (en) * | 1996-05-29 | 1997-09-16 | General Motors Corporation | Brake control system |
| US5720533A (en) | 1996-10-15 | 1998-02-24 | General Motors Corporation | Brake control system |
| US5746486A (en) | 1996-10-16 | 1998-05-05 | General Motors Corporation | Brake control system |
| EP0842841B1 (en) | 1996-11-19 | 2002-05-29 | Delphi Technologies, Inc. | Electric power steering control |
| FR2761039B1 (fr) | 1997-03-22 | 2002-05-31 | Bosch Gmbh Robert | Procede et dispositif de mise en oeuvre d'un systeme de guidage d'un vehicule automobile |
| JP3108389B2 (ja) | 1997-07-08 | 2000-11-13 | アイシン精機株式会社 | 後輪操舵装置 |
| US6205391B1 (en) | 1998-05-18 | 2001-03-20 | General Motors Corporation | Vehicle yaw control based on yaw rate estimate |
| US6125319A (en) | 1998-08-17 | 2000-09-26 | General Motors Corporation | Brake system control method responsive to measured vehicle acceleration |
| US6112147A (en) | 1998-08-17 | 2000-08-29 | General Motors Corporation | Vehicle yaw rate control with bank angle compensation |
| US6169951B1 (en) | 1998-08-21 | 2001-01-02 | General Motors Corporation | Active brake control having yaw rate estimation |
| US6175790B1 (en) | 1998-08-24 | 2001-01-16 | General Motors Corporation | Vehicle yaw rate control with yaw rate command limiting |
| US6062336A (en) | 1998-11-13 | 2000-05-16 | General Motors Corporation | Adaptive variable effort power steering system |
| US6161905A (en) | 1998-11-19 | 2000-12-19 | General Motors Corporation | Active brake control including estimation of yaw rate and slip angle |
| US6195606B1 (en) | 1998-12-07 | 2001-02-27 | General Motors Corporation | Vehicle active brake control with bank angle compensation |
| US6591179B1 (en) * | 2002-01-04 | 2003-07-08 | Delphi Technologies, Inc. | Method and system for progressive engagement of all-wheel drive |
-
2003
- 2003-01-03 US US10/336,252 patent/US6968261B2/en not_active Expired - Fee Related
- 2003-11-17 EP EP03026502A patent/EP1435318B1/en not_active Expired - Lifetime
- 2003-11-17 DE DE60317451T patent/DE60317451T2/de not_active Expired - Lifetime
- 2003-12-26 JP JP2003433653A patent/JP4166684B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2004210270A (ja) | 2004-07-29 |
| EP1435318A3 (en) | 2004-12-01 |
| DE60317451D1 (de) | 2007-12-27 |
| DE60317451T2 (de) | 2008-09-18 |
| EP1435318B1 (en) | 2007-11-14 |
| US20040133321A1 (en) | 2004-07-08 |
| EP1435318A2 (en) | 2004-07-07 |
| US6968261B2 (en) | 2005-11-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4166684B2 (ja) | 車両安定性向上システムのための方法及び装置 | |
| JP4083676B2 (ja) | 車両統合シャーシ制御システムのための方法及び装置 | |
| JP4166676B2 (ja) | 車両安定性向上システムのための方法及び装置 | |
| EP1510438B1 (en) | Control device for vehicle power steering | |
| US6813552B2 (en) | Method and apparatus for vehicle stability enhancement system | |
| EP0465958A1 (en) | System for controlling the behavior of a vehicle during braking | |
| JP7379450B2 (ja) | オンセンターステアリングおよび高速反応車両のための方法および装置 | |
| JP5732499B2 (ja) | 運転支援を行う方法および装置 | |
| KR101288749B1 (ko) | 차량 다이나믹 콘트롤에 기초하여 스티어링 인게이지먼트에적용되는 드라이빙 컨디션 | |
| US12509148B2 (en) | Yaw compensation system, method for restoring a safe driving state, vehicle brake system and motor vehicle | |
| JP2005534558A (ja) | 自動車内でのハンドル操作中に作用する操舵トルクを決定する方法 | |
| CN115605392B (zh) | 具有与加速度相关的转向转矩反馈的线控转向系统 | |
| JP4297150B2 (ja) | Osまたはusを段階的に異なる手段で抑制する車輌 | |
| JPS63101158A (ja) | アンチスキツド制御装置 | |
| JP2008247067A (ja) | 車両の運動制御装置 | |
| JP2008528351A (ja) | 車両の走行動特性制御装置及び方法 | |
| JP2001030931A (ja) | 車両の操舵装置 | |
| JP4604685B2 (ja) | 車輌旋回走行アシストヨーモーメントを求める装置 | |
| JP4959277B2 (ja) | 車両運動制御装置 | |
| JP7016301B2 (ja) | 操舵制御装置及び操舵制御方法 | |
| JP2006117067A (ja) | 車両挙動制御装置 | |
| JP2020118057A (ja) | 駆動力制御装置 | |
| JP5004798B2 (ja) | 自動車の制御方法、自動車の制御装置及び自動車 | |
| JP2006021589A (ja) | 車輌の操舵制御装置 | |
| JPS6393657A (ja) | アンチスキツド制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20051201 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20060228 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20060303 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20060531 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20060822 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20061121 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20061128 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20070221 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20071002 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20071228 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20080108 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20080401 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20080701 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20080730 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110808 Year of fee payment: 3 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313113 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110808 Year of fee payment: 3 |
|
| S303 | Written request for registration of pledge or change of pledge |
Free format text: JAPANESE INTERMEDIATE CODE: R316303 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110808 Year of fee payment: 3 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110808 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120808 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130808 Year of fee payment: 5 |
|
| LAPS | Cancellation because of no payment of annual fees |