JP4189089B2 - 電気自動車用ドライブユニット - Google Patents
電気自動車用ドライブユニット Download PDFInfo
- Publication number
- JP4189089B2 JP4189089B2 JP20998199A JP20998199A JP4189089B2 JP 4189089 B2 JP4189089 B2 JP 4189089B2 JP 20998199 A JP20998199 A JP 20998199A JP 20998199 A JP20998199 A JP 20998199A JP 4189089 B2 JP4189089 B2 JP 4189089B2
- Authority
- JP
- Japan
- Prior art keywords
- rotor
- planetary gear
- gear
- thrust load
- electric motor
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images



Landscapes
- Arrangement Or Mounting Of Propulsion Units For Vehicles (AREA)
- Retarders (AREA)
Description
【発明の属する技術分野】
本発明は、2段のプラネタリギヤユニットを内蔵した電気自動車のドライブユニットに係り、特にインホイールタイプの電気自動車用ドライブユニットに用いて好適なものに関する。
【0002】
【従来の技術】
インホイールタイプのドライブユニットは、左右の駆動車輪の中にそれぞれ独立して納められており、該ドライブユニットは、左右の駆動車輪でその電気モータの回転駆動方向が異なる。
【0003】
従来、インホイールタイプのドライブユニットとして、ケース内に、電気モータと共に2段のプラネタリギヤユニットからなる減速装置を収納して、モータ回転を、上記2段の減速装置によりトルク増幅して駆動車輪に伝達するものが案出されている。
【0004】
【発明が解決しようとする課題】
インホイールタイプのドライブユニットは、左右の駆動車輪に同じものがそれぞれ設置されており、従って減速装置を構成するプラネタリギヤユニットのヘリカルギヤの捩れ角方向も同じものが用いられている。前述したように、左右の駆動車輪では、同じドライブユニットが設置されて、その駆動回転方向が異なる関係上、上記減速装置におけるスラスト荷重作用方向も異なる。
【0005】
特に、上述したように、軸方向に並設した2個のプラネタリギヤにて減速する場合、第1段のプラネタリギヤと第2段のプラネタリギヤの捩れ角が同方向であると、2個のプラネタリギヤによるスラスト荷重も大きくなり、上述したように左右の駆動車輌に同じドライブユニットを用いる関係上、左右の駆動車輪において、ドライブユニットに作用するスラスト荷重の差が大きくなる。
【0006】
上記左右駆動輪におけるスラスト荷重方向の異なりに基づき、ステータとロータとの軸方向のずれ量、ロータの回転位置を検出すべくケースに設けられるセンサとロータハブに設けられる上記センサの被検出部との軸方向のずれ量が、左右駆動輪にて異なり、左右の駆動輪でのドライブユニットにおける電気モータ性能に差を生じて電気自動車の走行性能に影響を与えてしまう。
【0007】
特に、スラスト荷重が車輪(ホイール)方向に作用する側では、ホイールベアリングへの押圧力を増大して転がり抵抗が増え、その結果、電気自動車の走行性能に影響を与えてしまうことがある。
【0008】
また反対に、スラスト荷重が機体方向に作用する側では、スラスト荷重を支持するスラストベアリングを大きくせざるを得ず、ドライブユニットの全長が大きくなり、駆動車輪内に配置するためにコンパクト性が要求されているこの種のドライブユニットの搭載性に問題を生じる。
【0009】
また、プラネタリギヤの反力要素、例えばリングギヤをドライブユニットのケースに固定する際、上記大きなスラスト荷重に対抗するために、該反力要素を固定するための手段の剛性をアップする必要があり、コストアップや重量増加の原因になってしまう。
【0010】
そこで、本発明は、電気モータの回転が正逆いずれの方向であっても、スラスト荷重を大きくすることなく、ロータに作用するスラスト荷重が常に一方向に作用するように構成し、もって上述課題を解決した電気自動車のドライブユニットを提供することを目的とするものである。
【0011】
【課題を解決するための手段】
本発明は、電気モータ(5)と、第1及び第2のプラネタリギヤ(6b)(6a)を軸方向に並設したプラネタリギヤユニット(6)と、を備え、電気モータの回転を、ヘリカルギヤからなる前記プラネタリギヤユニットを介して出力軸(10)に伝達してなる、電気自動車用ドライブユニット(1)において、
前記第1及び第2のプラネタリギヤ(6b)(6a)の回転方向及びそのヘリカルギヤの捩れ角方向を、前記電気モータ(15)のロータの回転が正逆いずれの方向であっても、該ロータに作用するスラスト荷重が所定の一方向となるように設定した、ことを特徴とする。
【0012】
前記ロータ(15)が、前記第1のプラネタリギヤ(6b)における入力要素(S1)に一体に結合し、
該第1のプラネタリギヤ(6b)による減速を介して第2のプラネタリギヤ(6a)に伝達することにより、該第2のプラネタリギヤに作用するスラスト荷重(Sb)を前記第1のプラネタリギヤに作用するスラスト荷重(Sa)より大きく設定し、
前記ロータ(15)が正逆いずれか一方に回転する場合、専ら第1のプラネタリギヤ(6b)のスラスト荷重(Sa)が該ロータに作用し、前記ロータ(15)が他方に回転する場合、前記第1及び第2のプラネタリギヤに作用するスラスト荷重の差(Sb−Sa)が該ロータに作用して、前記ロータの回転が正逆いずれの場合でも、該ロータに所定の一方向のスラスト荷重を作用してなる。
【0013】
前記第1及び第2のプラネタリギヤ(6b)(6a)は、それぞれ入力要素(S1)(S2)、出力要素(CR1)(CR2)及び固定要素(R1)(R2)を有し、かつ前記各固定要素(R1)(R2)に、前記ロータの回転が正逆いずれであっても互に逆方向のスラスト荷重(Sa)(Sb)が作用してなる。
【0014】
また、本発明は、前記第1のプラネタリギヤ(6b)の入力要素がサンギヤ(S1)であり、前記第2のプラネタリギヤ(6a)の入力要素がサンギヤ(S2)でありかつ該サンギヤが前記第1のプラネタリギヤの出力要素(CR1)に一体に連結され、
回転自在に支持されているシャフト(20)に前記ロータ(15)を一体に結合し、
前記第1のプラネタリギヤのサンギヤ(S1)を前記シャフト(20)に一体に形成し、前記第2のプラネタリギヤのサンギヤ(S2)を前記シャフト(20)に回転自在に支持すると共に該シャフトに形成した段部(20a)にスラストベアリング(26b)を介して当接して、
前記ロータ(15)が正逆いずれか一方に回転する場合、前記両サンギヤ(S1)(S2)のスラスト荷重(Sa)(Sb)が互に離れる方向に作用して、専ら前記第1のプラネタリギヤのサンギヤ(S1)のスラスト荷重(Sa)が、前記シャフト(20)を介して前記ロータ(15)に作用し、
前記ロータ(15)が他方に回転する場合、前記両サンギヤ(S1)(S2)のスラスト荷重(Sa)(Sb)が互に押合うように作用して、前記シャフト(20)及びロータ(15)に、前記両スラスト荷重の差(|Sb−Sa|)が作用してなる、ことを特徴とする。
【0015】
前記電気モータ(5)のロータ(15)を支持するロータハブ(19)に被検出部(19b)を設け、該被検出部を、ケース(3)に装着した回転位置検出手段(21)により検知して前記ロータの回転位置を検出し、
前記ロータの回転が正逆いずれであっても、前記ロータハブ(19)に作用するスラスト荷重が、前記回転位置検出手段(21)側に向って作用するように設定してなる。
【0016】
前記ドライブユニット(1)が、駆動車輪(2)内に配置されかつ前記出力軸(10)を該駆動車輪に連結したインホイールタイプであり、
左右駆動車輪に同じ前記ドライブユニットを配置して、前記左右駆動車輪にて、前記電気モータのロータ(15)が互に逆方向に回転してなる。
【0017】
車輌が前進状態にある場合、前記左右駆動車輪におけるドライブユニットは、いずれも、前記ロータ(15)に作用するスラスト荷重が、機体側に向って作用するように設定してなる。
【0018】
[作用]
以上構成に基づき、電気モータ(5)のロータ(15)の回転は、第1のプラネタリギヤ(6b)の入力要素(S1)を介してその出力要素(CR1)から例えば減速回転が第2のプラネタリギヤ(6a)の入力要素(S2)に伝達され、そして出力軸(10)を介して駆動車輪(2)に伝達される。
【0019】
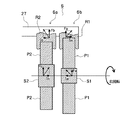
この際、前記ロータの回転が正逆いずれの方向にあっても、ヘリカルギヤに基づくスラスト荷重は、ロータ(15)に対して所定一方向に作用する。例えば図3に基づき説明すると、第1のプラネタリギヤの入力要素であるサンギヤ(S1)と、第2のプラネタリギヤの入力要素であるサンギヤ(S2)とは同じ方向に回転し、かつ異なる方向のヘリカル捩れ角を有しており、ロータ(15)が例えば左回転すると、第1のサンギヤ(S1)は図面左方向、第2のサンギヤ(S2)は図面右方向のスラスト荷重(Sa)(Sb)を生じ、かつ減速してトルク増大されている第2のサンギヤ(S2)のスラスト荷重(Sb)が第1のサンギヤ(S1)のもの(Sa)に比して大きい(Sa<Sb)。
【0020】
この際、例えば第1のサンギヤ(S1)は、ロータハブ(19)に一体のシャフト(20)に形成されて、該サンギヤ(S1)に作用するスラスト荷重(Sa)は直接シャフト(20)を介してロータハブ(19)及びロータ(15)に作用するが、第2のサンギヤ(S2)は、上記シャフト(20)に回転自在にかつその段部(20a)にスラストベアリング(26b)を介して当接しており、そのスラスト荷重は、所定一方向のものしかシャフト(20)を介してロータハブ(19)及びロータ(15)に作用しない。
【0021】
従って、上記第2のサンギヤ(S2)に作用する図面右方向に作用するスラスト荷重(Sb)は、スラストベアリング(26b)及び段部(20a)を介してシャフト(20)に作用し、上記第1のサンギヤ(S1)のスラスト荷重(Sa)と互に押合うように作用し、両スラスト荷重(Sa),(Sb)の差分(|Sb−Sa|)が、シャフト(20)を介してロータハブ(19)及びロータ(15)に対して所定一方向に作用する。
【0022】
また、ロータ(15)を例えば左回転すると、第1のサンギヤ(S1)及び第2のサンギヤ(S2)に作用するスラスト荷重(Sa)(Sb)は、上述と反対方向になり、両荷重は、互に離れる方向に作用する。この際、第2のサンギヤ(S1)のスラスト荷重(Sb)は、上記シャフト(20)に作用せず、専ら第1のサンギヤ(S1)のスラスト荷重(Sa)が、シャフト(20)を介してロータハブ(19)及びロータ(15)に対して所定一方向に作用する。
【0023】
なお、上記カッコ内の符号は図面と対照するためのものであるが、便宜的なものであって、本発明の構成を何等限定するものではない。
【0024】
【発明の効果】
請求項1に係る本発明によると、電気モータの回転が正逆いずれの方向であっても、第1及び第2のプラネタリギヤによりロータに作用するスラスト荷重が所定一方向であるため、電気モータが正逆転してもロータの軸方向位置精度を正確に維持することができ、電気モータの正逆転によって電気モータの性能が変化することなく、安定した電気モータの性能を得て、電気自動車の信頼性及び性能を向上することができる。
【0025】
更に、請求項1に係る本発明によると、第1のプラネタリギヤの減速によるトルク増大により第2のプラネタリギヤに作用するスラスト荷重を第1のプラネタリギヤに作用するスラスト荷重より大きくして、電気モータの一方向回転では、専ら第1のプラネタリギヤのスラスト荷重がロータに作用し、電気モータの他方向回転では、両プラネタリギヤのスラスト荷重の差分がロータに作用して、電気モータの正逆回転に拘らず、常に安定して一方向のスラスト荷重をロータに作用し、ロータの軸方向位置決めの精度を確実に保持することができると共に、最大スラスト荷重を小さくして、ホイールベアリングのロスを低減したり、スラストベアリングの容量を減少して、コンパクト化、特に軸方向の長大化を防止できる。
【0026】
請求項3に係る本発明によると、第1及び第2のプラネタリギヤの固定要素が、電気モータの正逆転に拘らず、常にそのスラスト荷重が反対方向に作用するので、固定要素全体としてのスラスト荷重は互に打消されて低減され、従ってこれら固定要素をケース等に固定する固定手段の剛性を低く又はその数を少なくすることができる。例えば、前記第1及び第2のプラネタリギヤの固定要素がドラム状部材に形成されたリングギヤであると、該ドラム状部(27)をケース(3a)に固定する環状円板(30)及び抜止め・固定用のスナップリング(28)の剛性を高くしなくとも足り(即ち上記円板及びスナップリングの肉厚を薄くすることができ)、また上記円板(30)をケース(3b)に固定するためのボルト(31)の本数を減らすことが可能となり、これらが相俟って、軸方向のコンパクト化、軽量化及びコストダウンを図ることができる。
【0027】
請求項2に係る本発明によると、ロータに一体に結合するシャフトに、第1のプラネタリギヤのサンギヤを一体に形成し、第2のプラネタリギヤのサンギヤを回転自在に支持すると共にその段部にスラストベアリングを介して当接したので、ロータの回転方向により、比較的大きい方のスラスト荷重を、小さい方のスラスト荷重に抗してシャフトに作用するか又は該シャフトに作用させないことにより、簡単で信頼性の高い構成でもってロータに作用するスラスト荷重を常に所定一方向に保持することができる。
【0028】
請求項4に係る本発明によると、電気モータ、特にDCブラシレスモータは、ロータの回転位置を正確に検出することがその性能を発揮する上で好ましいが、電気モータの回転方向に拘らず、常にロータを回転位置手段側に向けてスラスト荷重を発生し、ケースに固定されている回転位置検出手段とロータハブに設けられた被検出部との相対位置を常に高い精度で保持し、ステータとロータとの相対位置も高い精度で保持することと相俟って、電気モータの性能を常に良好な状態に維持することができる。
【0029】
請求項1又は5に係る本発明によると、上述した電気モータの正逆転に拘らず高い性能を維持し得るドライブユニットを、左右駆動輪にて電気モータの回転が逆になるインホイールタイプとして適用することにより、左右駆動車輪に同じドライブユニットを配置して、コストダウンを図ることができるものでありながら、左右駆動輪のドライブユニットは、略々同じ高い性能を維持して、この種のインホイールタイプの電気自動車の性能を向上することができる。
【0030】
請求項6に係る本発明によると、車輌が前進状態にある場合、前記左右駆動車輪に配置されたドライブユニットは、いずれも、前記ロータに作用するスラスト荷重が、機体側に向って作用するので、出力軸をケースに支持するホイールベアリングに作用するスラスト荷重を低減又はなくすことができ、該ホイールベアリングの負荷を減少して、車輌の走行性能を向上することができる。
【0031】
【発明の実施の形態】
以下、図面に沿って、本発明の実施の形態について説明する。図1及び図2は、ゴルフカート用電気自動車に用いて好適なインホイールタイプのドライブユニットを示す図であり、図1に示すように、ドライブユニット1は、駆動車輪2のホイールリム2a内に収められている。
【0032】
該ドライブユニット1は、2つ割ケース3a,3bからなる一体ケース3内に収納された電気モータ(電気回転手段)5及びプラネタリギヤユニット6を有しており、上記一体ケース3は、懸架装置7を介して車体9に懸架されている。また、外側ケース3aには出力軸10がホイールベアリング11を介して回転自在に支持されてケース外に突出しており、該出力軸10にホイールリム2a固定用のハブ12がスプライン係合してナット14により抜止め・固定されている。
【0033】
上記電気モータ5は、図2に詳示するように、ブラシレスDCモータからなり、内側ケース3bに固定されているステータ13と、該ステータ13と微小間隔(エアギャップ)Gを存して回転自在に支持されているロータ15とを有している。なお、該電気モータ(電気回転手段)5は、モータとして回転力を出力すると共に、回生ブレーキとしても機能し、上記ブラシレスDCモータに限らず、他の同期式又は誘導式の交流モータ、更には直流モータでもよい。更に、内側ケース3bには多穴形シールコネクタ16のための開口17が穿設されており、車体内のコントローラ及びバッテリと電気的(電力的及び信号的)に連通している。前記ロータ15は、多数の積層板からなるロータ部鉄心15a及び該鉄心の周方向所定間隔毎に埋込まれかつ軸方向に延びる希土類磁石等の永久磁石15bを有しており、該ロータ15はロータハブ19の外周面に固定されて支持されている。一方、前記ステータ13は、多数の積層板からなり、内径側に配置される円環部から外径方向放射状に多数の磁極歯が形成される磁極部鉄心13aと、上記磁極歯に巻回される3相の界磁コイル13bと、上記磁極歯の先端に一体に結合される円環状のヨーク部鉄心13cとを備えており、該ヨーク部鉄心が前記内側ケース3bに一体に固定されている。
【0034】
また、前記ロータハブ19はその内側端に内径方向に延びるフランジ部19aを有しており、該フランジ部19aはシャフト20に固定されている。該シャフト20は、その両端部にてそれぞれラジアルベアリング18,22を介して前記出力軸10及び内側ケース3bに支持されている。また、前記ロータハブ19には内側方向に突出して環状の凹溝を形成する2条の鍔部19b,19bが一体に設けられており、これら鍔部の間には前記内側ケース3bの外方から回転位置センサ(手段)21の検出部21aが嵌挿されて、ロータの回転位置を検出している。なお、該回転位置センサ21は、ホール素子からなるものが好ましいが、シャフトエンコーダ等の光電式、磁気式回転センサ、レゾルバ等の他の回転変位センサでもよい。前記ブラシレスDCモータ5は、ロータ15とステータ13との位置関係を正確に求めながら、ステータに印加する交流電流を正確に制御する必要があり、上記回転位置センサ21の検出精度が、前記電気モータのステータ及びロータの位置精度と合せて、該電気モータの性能に大きく影響を及ぼすため、上記センサ検出部21aとロータハブ19との軸方向位置精度を充分に高める必要がある。
【0035】
一方、前記フランジ部19aの外側(図面左側)におけるロータハブ19内には、前記プラネタリギヤユニット6が収納されている。該ギヤユニット6は、軸方向に並べて設けられた2個のシンプルプラネタリギヤ6a,6bからなり、それぞれサンギヤS1,S2が入力要素、キャリヤCR1,CR2が出力要素、リングギヤR1,R2が固定(反力)要素となり、2段の減速装置を構成している。即ち、内側(第1の)プラネタリギヤ6bのキャリヤCR1が外側(第2の)プラネタリギヤ6aのサンギヤS2に連結していると共に、両リングギヤR1,R2が一体に構成されている。また、内側サンギヤS1は前記シャフト20に一体に形成されて、入力部材を構成しており、外側サンギヤS2はシャフト20にニードルベアリング23を介して回転自在に支持されており、そして外側キャリヤCR2が前記出力軸10に一体に構成されている。なお、各キャリヤCR1,CR2はそれぞれニードルベアリング24,25を介して複数のピニオンギヤP1,P2を回転自在に支持しており、かつ前記リングギヤR1,R2、サンギヤS1,S2、ピニオンギヤP1,P2は、後述するように、所定捩れ角方向のヘリカルギヤからなる。
【0036】
そして、前記フランジ部19aと、内側ケースボス部3b1 にシャフト20の一端を支持するラジアルボールベアリング22のアウタレースとの間、及び外側(第2の)サンギヤS2の先端と、出力軸10にシャフト20の他端を支持するラジアルボールベアリング18のアウタレースとの間に、それぞれスラストベアリング26a,26cが介在しており、またシャフト20の段部20aと、一体の内側(第1の)キャリヤCR1及び外側サンギヤS2との間にレース付きのスラストベアリング26bが介在している。これにより、外側サンギヤS2に作用するスラスト荷重は、機体方向(図面右方向)に対して中間スラストベアリング26b、段部20a及びシャフト20を介してロータハブ19に作用するが、車輪方向(図面左方向)に対してはスラストベアリング26cを介して出力軸10、そしてホイールベアリング11を介してケース3に作用して、シャフト20(従ってロータハブ19)に作用しない。
【0037】
また、前記リングギヤR1,R2は、ドラム状部材27の内周面に形成された歯数の異なる内歯ギヤからなり、該ドラム状部材27の外側外周面にはスプライン27aが形成されている。また、外側ケース3aの内面には、環状に軸方向内方に突出する鍔部29が一体に形成されており、該鍔部29には環状の円板30がボルト31により固定されている。該円板30の内周面にはスプライン30aが形成されており、該スプラインが前記ドラム状部材27のスプライン27aに係合してスナップリング28により抜止めされて、ドラム状部材27従ってリングギヤR1,R2がケース3aに一体に(回転不能に)支持されている。
【0038】
上記ドラム状部材27固定用の環状円板30が、前記環状の鍔部29の先端に密接して固定されることにより、該円板30、外側ケース3a及びその環状鍔部29の間で環状の空部Cが形成され、その底部分、即ちドラム状部材27の内周面より下方部分が、オイルを溜め得るオイルリザーバ室Aとなる。更に、前記環状の鍔部29の最下部分に幅狭の切溝(小開口)39が形成されており、該切溝39は、上記オイルリザーバ室Aに溜められたオイルを所定量ずつ絞って排出する排出路を構成している。一方、一体ケース3の下部はオイル溜りBが形成されており、該オイル溜りBのオイルレベルは、前記オイルリザーバ室Aに溜められるオイル量により変化し得る。
【0039】
そして、図3に示すように、内側(第1の)プラネタリギヤ6bと外側(第2の)プラネタリギヤ6aとは、ヘリカルギヤの捩れ角方向が逆になるように設定されている。具体的には、車輪側からみて、内側サンギヤS1が左ネジ方向、外側サンギヤが右ネジ方向に設定されており、該設定された捩れ角方向にそれぞれ噛合するように、内側ピニオンP1及び内側リングギヤR1、外側ピニオンP2及び外側リングギヤR2の所定捩れ角方向が設定されている。なお、上述したドライブユニット1は、左駆動車輪及び右駆動車輪に対しても同じものが用いられる。
【0040】
ついで、上述した実施例の作用について説明する。運転者のアクセルペダルの踏込みに基づき、コントローラからの信号により電気モータ5のロータ15が回転する。該ロータ15の回転は、ロータハブ19及びシャフト20を介して内側サンギヤS1に伝達され、内側リングギヤR1が固定されていることにより、内側キャリヤCR1が減速して同方向に回転する。更に、該内側キャリヤCR1は外側サンギヤS2を一体に回転し、外側リングギヤR2が固定されていることにより、同様に外側キャリヤCR2が減速して同方向に回転し、出力軸10に伝達される。即ち、上記ロータ15の回転は、内側プラネタリギヤ6b及び外側プラネタリギヤ6aの2段にて減速されて出力軸10に伝達され、駆動車輪2を走行駆動する。
【0041】
これにより、ゴルフコース等の起伏の多い道であっても、上記2段減速による大きなトルクにより、かつ運転者のアクセルペダル踏量に基づき、電気モータ5は、始動時の低速回転から、中速、高速回転まで制御されて、ゴルフカートは所望速度で走行する。また、操縦者のブレーキ操作により、電気モータ5は回生ブレーキとして機能すると共に、図示しない摩擦ブレーキの作用により、カートは停止する。
【0042】
上述したドライブユニット1の駆動は、左右の両駆動車輪、即ち前輪及び後輪のいずれか一方(2輪駆動)又は両方(4輪駆動)に対して行われるが、左右に同じドライブユニット1が用いられる関係上、電気モータ5は、左右の駆動車輪において逆方向に回転駆動される。即ち、車輌を前進させる場合、機体側から見て、左ドライブユニットの電気モータは右回転し、右ドライブユニットの電気モータは左回転し、それぞれプラネタリギヤユニット6の2段減速を経て、出力軸10及び車輪12を同方向に回転する。
【0043】
左ドライブユニットにあっては、図3に示すように、電気モータのロータ15の右回転に基づく内側(第1の)サンギヤS1の右回転により、左ネジ方向の捩れ角のヘリカルギヤからなる該サンギヤS1には、矢印に示す接線方向荷重Fa及びスラスト荷重Saを生じる。更に、内側プラネタリギヤ6bによる減速を経て右回転する、右ネジ方向の捩れ角のヘリカルギヤからなる外側(第2の)サンギヤS2には、矢印に示す接線方向荷重Fb及びスラスト荷重Sbを生じる。この際、スラスト荷重Sa,Sbは、内側サンギヤS1が車輪方向(図面左方向)であるのに対し、外側サンギヤS2が機体方向(図面右方向)であって、互に押合う方向に作用し、かつ内側プラネタリギヤ6bによる減速を経てトルクが増大されている外側サンギヤS2のスラスト荷重Sbは、内側サンギヤS1のスラスト荷重Saより大きい(Sa<Sb)。
【0044】
そして、外側サンギヤS2のスラスト荷重Sbは、スラストベアリング26b及び段部20aを介してシャフト20に機体方向に作用し、また内側サンギヤS1はシャフト20に直接形成されているので、そのスラスト荷重Saはシャフト20に対して車輪方向に作用する。従って、シャフト20、該シャフトと一体のロータハブ19及びロータ15には、[Sb−Sa]のスラスト荷重が機体方向に作用する。
【0045】
一方、右ドライブユニットにあっては、電気モータ5のロータ15の左回転に基づき、内側サンギヤS1及び外側サンギヤS2も左回転をして、各サンギヤには、図3と逆方向で同じ力(逆方向で同じ長さのベクトル)の荷重を生ずる。即ち、内側サンギヤS1のスラスト荷重Saは機体方向であるのに対し、外側サンギヤS2のスラスト荷重Sbは車輪方向であって、互に離れる方向に作用し、かつ外側サンギヤのスラスト荷重Sbが内側サンギヤのそれSaよりも大きい(Sa<Sb)。
【0046】
そして、内側サンギヤS1のスラスト荷重Saは、シャフト20に直接作用する(機体方向)が、車輪方向に作用する外側サンギヤS2のスラスト荷重Sbは、スラストベアリング26c、ボールベアリング21のアウタレースを介して出力軸10、そしてホイールベアリング11を介してケース3に作用し、シャフト20に対しては作用しない。従って、シャフト20、従ってそれと一体のロータハブ19及びロータ15には、|Sa|のスラスト荷重が機体方向に作用する。
【0047】
これにより、左右の駆動車輪に配置されているドライブユニットは、その両方とも、車輌前進時には、シャフト20、ロータ15及びロータハブ19に機体方向のスラスト荷重が作用する。そして、シャフト20は、機体方向のスラスト荷重に対して、スラストベアリング26a、ボールベアリング22のアウタレースを介して内側ケース3b(3b1 )に高い精度で位置決めされており、従って同じドライブユニット1を用いるものでありながら、左右両ドライブユニットにおいて、ロータハブ19に設けられた被検知部となる鍔部19bと、内側ケース3bに設置された回転位置検知センサ21の検出部21aとの位置精度を良好に保持して、高い精度にてロータの回転変位を検出し得る。また同様に、左右両ドライブユニットにおいて、ロータ15と、内側ケース3bに設置されているステータ13との軸方向の位置精度を良好に保持して、常に所定の高い効率に電気モータ5の性能を維持し得る。また、同様に、ロータ15の軸方向位置精度が良好に保持されている以上、内側ケース3aに支持されているステータ13との位置精度も常に正確に保持される。
【0048】
更に、内側及び外側サンギヤS1,S2に作用するスラスト荷重Sa,Sbは、電気モータ5の回転が正転及び逆転に拘らず、重畳されて車輪方向に作用することはなく、スラストベアリング26c及びボールベアリング21のアウタレースを介して出力軸10に作用するスラスト荷重も減少しており、該出力軸10をケース3に支持するホイールベアリング11の負荷も減少している。即ち、電気モータ5が右回転している場合、内側サンギヤS1及び外側サンギヤS2は互に押合いながら、全体として機体方向に作用するので、スラストベアリング26cを介して出力軸10に作用するスラスト荷重はない。また、電気モータ5が左回転している場合、内側サンギヤS1のスラスト荷重Saは機体方向に作用して車輪方向に作用しないが、外側サンギヤS2のスラスト荷重Sbは、スラストベアリング26c等を介して出力軸10に作用する。
【0049】
一方、反力支持部材としてケースに固定されているリングギヤR1,R2にも、上記ヘリカルギヤに起因するスラスト荷重が作用する。そして、これらリングギヤR1,R2のスラスト荷重は、それぞれサンギヤS1,S2のスラスト荷重と打消し合うように作動し、各プラネタリギヤ6a,6bにあっては、平衡して、スラスト荷重が発生しないように設定されている。
【0050】
左ドライブユニット1にあっては、図3に示すように、内側リングギヤR1には、矢印方向の接線方向荷重Fa及びスラスト荷重Saを生じ、外側リングギヤR2には、矢印方向の接線方向荷重Fb及びスラスト荷重Saを生じる。両スラスト荷重Sa,Sbは互に離れる方向、即ち内側リングギヤR1のものSaは機体方向に、外側リングギヤR2のものは車輪方向に作用し、かつ第1段の減速装置である内側プラネタリギヤ6bを経てトルクが増大されている外側リングギヤR2のスラスト荷重Sbが内側リングギヤR1のそれSaより大きい(Sa<Sb)。
【0051】
前記両リングギヤR1,R2は、ドラム状部材27に直接形成されているため、前記各リングギヤに作用する逆方向のスラスト荷重Sa,Sbは、該ドラム状部材27内にて打消し合い、従ってその差[Sb−Sa]のスラスト荷重が車輪方向に作用する。該ドラム状部材27の車輪方向へのスラスト荷重は、スプライン27a,30aを介して環状円板30に作用し、そしてボルト31にて該円板30が固定されている外側ケース3a(29)にて担持されるが、上記スラスト荷重Sa,Sbが互に逆方向に作用してその差分に減少されているので、上記ドラム状部材27、円板30等に作用する力は大きくない。
【0052】
なお、前記ドラム状部材27と円板30とが係合するスプライン27a,30aに所定方向の捩れ角を形成すると、ドラム状部材27に作用する接線方向力(Fa+Fb)による上記スプラインの捩れ角に基づくスラスト荷重が前記ヘリカルリングギヤによるスラスト荷重(Sb−Sa)と互に打消し合って、ドラム状部材27を正確に位置決めすると共に、円板30に作用する力を低減し得る。
【0053】
一方、右ドライブユニット1にあっては、電気モータのロータ15が左回転するので、リングギヤR1,R2にも、図3に示す矢印と反対方向の荷重が作用する。即ち、内側リングギヤR1には車輪方向のスラスト荷重Saが、外側リングギヤR2には機体方向のスラスト荷重Sbがそれぞれ作用し、両スラスト荷重は、互に押合う方向に作用して、かつ外側のスラスト荷重Sbが内側のそれSaよりも大きいので(Sa<Sb)、ドラム状部材27には、|Sb−Sa|のスラスト荷重が機体方向に作用する。
【0054】
そして、該ドラム状部材27の機体方向のスラスト荷重は、スナップリング28、円板30、ボルト31を介して内側ケース3aにて担持されるが、上記スラスト荷重は、互に打消し合って減少されているので大きくはなく、従ってスナップリング28及び円板30の剛性を高める必要がなく、かつ円板30をケースに固定するボルト31の数も多数設ける必要がない。
【0055】
なお同様に、前記ドラム状部材27と円板30とが係合するスプライン27a,30aに捩れ角を形成すると、ドラム状部材に作用する接線方向力(ベクトル矢印が逆方向の|Fa+Fb|)による上記スプライン捩れ角に基づくスラスト荷重が上記ヘリカルリングギヤによるスラスト荷重(ベクトル矢印が逆方向の|Sb−Sa|)と互に打消し合って、ドラム状部材27、円板30、スナップリング28に作用する力を更に低減することができる。
【0056】
従って、前述したように、スラスト荷重が互に打消されて、装置全体としての最大スラスト荷重を低減することができ、これによりスラストベアリングを負荷容量の小さいものを用いることができ、前記スナップリング28及び円板30が剛性の低い薄いものを用いることができることと相俟って、ドライブユニットの軸方向寸法の短縮化を図ることができる。
【0057】
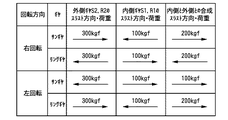
ついで、上述説明を具体化した一実施例を、図4の表に沿って説明する。左ドライブユニットにあっては、車輌前進時、電気モータ5は右回転し、外側サンギヤS2に300[kgf]の機体方向のスラスト荷重が生じ、かつ内側サンギヤS1に100[kgf]の車輪方向のスラスト荷重が生じる。これら両スラスト荷重は、シャフト20の段部20aにて互に押合うように作用し、シャフト20、従ってロータ15及びロータハブ19には、(300−100=200)[kgf]の機体方向のスラスト荷重が作用する。
【0058】
また、外側リングギヤR2に300[kgf]の車輪方向のスラスト荷重が生じ、かつ内側リングギヤR1に100[kgf]の機体方向のスラスト荷重を生じる。これら両スラスト荷重は、一体のドラム状部材27に、(300−100=200)[kgf]のスラスト荷重として車輪方向に作用する。
【0059】
一方、右ドライブユニットにあっては、車輌前進時、電気モータ5は左回転し、外側サンギヤS2に300[kgf]の車輪方向のスラスト荷重が生じ、内側サンギヤS1に100[kgf]の機体方向のスラスト荷重が生じる。外側サンギヤS1のスラスト荷重(300[kgf])は、シャフト20に作用しないので、シャフト20、従ってそれと一体のロータ15及びロータハブ19には、専ら内側サンギヤS1のスラスト荷重(100[kgf])が機体方向に作用する。
【0060】
また、外側リングギヤR2に300[kgf]の機体方向のスラスト荷重が生じ、かつ内側リングギヤR1に100[kgf]の車輪方向のスラスト荷重が生じ、従って各リングギヤが一体に形成されているドラム状部材27には、(300−100=200)[kgf]の機体方向のスラスト荷重が作用する。
【0061】
なお、上述説明は、車輪の前進方向について説明したが、後進する場合、電気モータの回転方向も逆となるため、左右のドライブユニットの関係が逆になるだけで、力関係において同様である。
【0062】
ついで、図5及び図6に沿って、他の実施例について説明する。図5は、先の実施例と同様に、第1の(内側)プラネタリギヤと第2の(外側)プラネタリギヤのヘリカルギヤ、即ち両プラネタリギヤの入力要素の捩れ角方向が逆方向であり、かつこれら両サンギヤが互に同方向に回転する、2段の各プラネタリギヤユニット(ギヤトレイン)を示す図である。
【0063】
図5における1のギヤトレインは、先の実施例(図1ないし(図4参照)のスケルトンで示したものであり、電気モータの回転が第1のプラネタリギヤのサンギヤに入力し、両リングギヤを固定すると共に、第2のプラネタリギヤのキャリヤから出力するものである。該実施例は、先に説明したように、入力回転(電気モータ及び第1のサンギヤの回転)が正転(右ドライブユニットを中心としている本スケルトンにあって、先の説明の左回転が正転となる)の場合、第1及び第2のサンギヤはスラスト荷重が互に離れるように作用し、従って第2のサンギヤの車輪方向のスラスト荷重はシャフト、従ってロータ及びロータハブのセンサ部(図2の19b参照)には第1のサンギヤに基づく機体方向(センサ部方向)のスラスト力が作用する。
【0064】
入力回転が逆転する場合(先の実施例における左ドライブユニットにおける右回転に相当する)、第1及び第2のサンギヤのスラスト荷重が互に押合う方向に作用し、センサ部(ロータハブ)には、その差からなるスラスト荷重が機体方向に作用する。
【0065】
図5における2のギヤトレインは、第1のサンギヤに入力回転を伝達すると共に、第2のリングギヤを出力とし、第1のキャリヤと第2のサンギヤを連結し、かつ第1のリングギヤ及び第2のキャリヤを固定したものである。該ギヤトレインは、第1のプラネタリギヤにて1段減速されて第2のサンギヤに伝達され、更に該第2のサンギヤの回転は、公転が阻止されているピニオンギヤを介してリングギヤから減速して出力する。
【0066】
該実施例にあっても、入力回転が正転の場合(右ドライブユニットの前進方向に相当)、第1及び第2のサンギヤのスラスト荷重が互いに離れる方向に作用し、第2のサンギヤのスラスト荷重は車輪方向に作用して、センサ部(ロータハブ)には、第1のサンギヤのスラスト荷重のみが機体方向に作用する。また、入力回転が逆転の場合(左ドライブユニットの前進方向に相当)、第1及び第2のサンギヤのスラスト荷重が互に押合う方向に作用し、センサ部(ロータハブ)には、両スラスト荷重の差分が機体方向(センサ部方向)に作用する。
【0067】
図5における3のギヤトレインは、第1のサンギヤに入力すると共に第2のサンギヤから出力し、かつ両キャリヤを一体に連結すると共に、両リングギヤを固定したものである。第1のサンギヤの回転は、減速して共通キャリヤに伝達され、そして増速して第2のサンギヤに伝達される。この際、トータルギヤ比が1より大きくなるように、即ち減速するように設定されている。
【0068】
該実施例にあっても、入力回転が正転の場合、第1及び第2のサンギヤのスラスト荷重が互に離れる方向に作用し、第1のサンギヤのスラスト荷重のみが、センサ部(ロータハブ)に機体方向に作用する。また、入力回転が逆転の場合、第1及び第2のサンギヤのスラスト荷重が互に押合う方向に作用し、センサ部(ロータハブ)には、上記両スラスト荷重の差分が機体方向に作用する。
【0069】
図5における4のギヤトレインは、第1のサンギヤに入力すると共に第2のサンギヤから出力し、両リングギヤを連結すると共に両キャリヤを固定したものである。第1のサンギヤの回転は減速して共通リングギヤに伝達され、更に該リングギヤの回転は増速して第2のサンギヤに伝達されるが、この際、トータルギヤ比が1より大きく設定されて全体として減速する。
【0070】
該実施例にあっても、入力回転が正転の場合、第1及び第2のサンギヤのスラスト荷重が互に離れる方向に作用し、第1のサンギヤのスラスト荷重のみが、センサ部(ロータハブ)に機体方向に作用する。また、入力回転が逆転の場合、第1及び第2のサンギヤのスラスト荷重が互に押合うように作用し、センサ部(ロータハブ)には、両スラスト荷重の差分が機体方向に作用する。
【0071】
図6は、第1の(内側)プラネタリギヤと第2の(外側)プラネタリギヤのヘリカルギヤ、即ち両プラネタリギヤの入力要素の捩れ角方向が同方向であり、かつこれらサンギヤが互に逆方向に回転する。2段の各プラネタリギヤユニット(ギヤトレイン)を示す図である。
【0072】
図6における5のギヤトレインは、第1のサンギヤに入力し、第2のサンギヤから出力し、かつ第1のリングギヤと第2のサンギヤとを連結すると共に、第1のキャリヤ及び第2のリングギヤを固定したものである。第1のサンギヤの回転は、減速されて第1のキャリヤ及び第2のリングギヤに伝達され、更に該リングギヤの回転は増速されてサンギヤに伝達されるが、この際、トータルギヤ比が−1より小さく設定されて全体として減速する。
【0073】
該実施例にあっても、入力回転が正転の場合、第1及び第2のサンギヤのスラスト荷重が互に離れる方向に作用し、第1のサンギヤのスラスト荷重のみが、センサ部(ロータハブ)に機体方向に作用する。また、入力回転が逆転の場合、第1及び第2のサンギヤのスラスト荷重が互に押合うように作用し、センサ部(ロータハブ)には、両スラスト荷重の差分が機体方向に作用する。
【0074】
図6における6のギヤトレインは、第1のサンギヤに入力し、かつ第2のキャリヤから出力し、そして第1のリングギヤと第2のサンギヤとを連結すると共に、第1のキャリヤ及び第2のリングギヤを固定したものである。第1のサンギヤの回転は、減速されて第1のリングギヤ及び第2のサンギヤに伝達され、更に該第2のサンギヤの回転が、減速されて第2のキャリヤから出力される。
【0075】
該実施例にあっても、入力回転が正転の場合、第1及び第2のサンギヤのスラスト荷重が互に離れる方向に作用し、第1のサンギヤのスラスト荷重のみが、センサ部(ロータハブ)に機体方向に作用する。また、入力回転が逆転の場合、第1及び第2のサンギヤのスラスト荷重が互に押合うように作用し、センサ部(ロータハブ)には、両スラスト荷重の差分が機体方向に作用する。
【0076】
図6における7のギヤトレインは、第1のサンギヤに入力し、第2のリングギヤから出力し、かつ第1のリングギヤと第2のサンギヤとを連結すると共に、第1及び第2のキャリヤを固定したものである。第1のサンギヤの回転は、減速されて第1のリングギヤ及び第2のサンギヤに伝達され、更に第2のサンギヤの回転が、減速されて第2のリングギヤから出力される。
【0077】
該実施例にあっても、入力回転が正転の場合、第1及び第2のサンギヤのスラスト荷重が互に離れる方向に作用し、第1のサンギヤのスラスト荷重のみが、センサ部(ロータハブ)に機体方向に作用する。また、入力回転が逆転の場合、第1及び第2のサンギヤのスラスト荷重が互に押合うように作用し、センサ部(ロータハブ)には、両スラスト荷重の差分が機体方向に作用する。
【0078】
図6における8のギヤトレインは、第1のサンギヤに入力し、第2のサンギヤから出力し、かつ第1のリングギヤと第2のキャリヤとを連結すると共に、第1のキャリヤ及び第2のリングギヤを固定したものである。第1のサンギヤの回転は、減速されて第1のリングギヤ及び第2のキャリヤに伝達され、更に該第2のキャリヤの回転は、増速されて第2のサンギヤから出力するが、この際、トータルギヤ比が−1より小さく設定されて全体として減速する。
【0079】
該実施例にあっても、入力回転が正転の場合、第1及び第2のサンギヤのスラスト荷重が互に離れる方向に作用し、第1のサンギヤのスラスト荷重のみが、センサ部(ロータハブ)に機体方向に作用する。また、入力回転が逆転の場合、第1及び第2のサンギヤのスラスト荷重が互に押合うように作用し、センサ部(ロータハブ)には、両スラスト荷重の差分が機体方向に作用する。
【0080】
なお、上記各実施例に示すギヤトレインに限らず、デュアルプラネタリギヤを備えるもの等、2段のプラネタリギヤユニットを備えて、電気モータの回転が正逆に拘らず、常に同方向のスラスト荷重が発生するものに、同様に適用可能である。
【0081】
また、前記実施例は、左右駆動車輪において電気モータの回転が逆になるインホイールタイプのドライブユニットについて説明したが、これに限らず、例えば車体側にドライブユニットを設け、各ドライブユニットの出力回転を直接左右駆動車輪に伝達する、いわゆるデフレス方式、また電気モータの回転を単に減速してかつディファレンシャル装置を介して左右駆動車輪に伝達するノートランスミッション方式等の他の電気自動車のドライブユニットにも同様に適用できる。この場合、上記デフレス方式にあっては、左右駆動車輪用のドライブユニットが電気モータの回転が逆になり、上述したインホイールタイプと同様であるが、他の方式のドライブユニットは、車体に1個設置されているだけで、車輌を前進又は後進に切換える際に電気モータの回転が逆転するので、この際に上述したスラスト荷重が一方向になる技術思想を適用し得る。また、ハイブリッド車輌のドライブユニットついても同様に適用し得る。
【図面の簡単な説明】
【図1】本発明に係るドライブユニットを適用した駆動車輪部分を示す断面図。
【図2】そのドライブユニットを示す拡大した断面図。
【図3】2個のプラネタリギヤのスラスト荷重を示す概略説明図。
【図4】スラスト荷重の方向と大きさの一具体例を示す図。
【図5】2個のプラネタリギヤのヘリカル捩れ方向が逆方向でかつ両プラネタリギヤの入力要素が同方向に回転する各ギヤトレイン(プラネタリギヤユニット)の実施例を示す図。
【図6】2個のプラネタリギヤのヘリカル捩れ方向が同方向でかつ両プラネタリギヤの入力要素が逆方向に回転する各ギヤトレイン(プラネタリギヤユニット)の実施例を示す図。
【符号の説明】
1 ドライブユニット
2 車輪
3 ケース
5 電気モータ
6 プラネタリギヤユニット
6b 第1のプラネタリギヤ
S1 そのサンギヤ(入力要素)
CR1 そのキャリヤ(出力要素)
R1 そのリングギヤ(固定要素)
6a 第1のプラネタリギヤ
S2 そのサンギヤ(入力要素)
CR2 そのキャリヤ(出力要素)
R2 そのリングギヤ(固定要素)
13 ステータ
15 ロータ
19 ロータハブ
19a フランジ部
19b 被検出部(鍔部)
20 シャフト
20a 段部
21 回転位置検出手段(センサ)
26a,26b,26c スラストベアリング
Sa,Sb スラスト荷重
Claims (6)
- 電気モータと、第1及び第2のプラネタリギヤを軸方向に並設したプラネタリギヤユニットと、を備え、電気モータの回転を、ヘリカルギヤからなる前記プラネタリギヤユニットを介して出力軸に伝達してなる、電気自動車用ドライブユニットにおいて、
前記ドライブユニットが、駆動車輪内に配置されかつ前記出力軸を該駆動車輪に連結したインホイールタイプであり、
左右駆動車輪に同じ前記ドライブユニットを配置して、前記左右駆動車輪にて、前記電気モータのロータが互に逆方向に回転してなり、
前記電気モータのロータが、前記第1のプラネタリギヤにおける入力要素に一体に結合し、
該第1のプラネタリギヤによる減速を介して第2のプラネタリギヤに伝達することにより、該第2のプラネタリギヤに作用するスラスト荷重を前記第1のプラネタリギヤに作用するスラスト荷重より大きく設定し、
前記第1及び第2のプラネタリギヤのヘリカルギヤの捩れ角方向を、前記ロータが正逆いずれか一方に回転する場合、専ら第1のプラネタリギヤのスラスト荷重が該ロータに作用し、前記ロータが他方に回転する場合、前記第1及び第2のプラネタリギヤに作用するスラスト荷重の差が該ロータに作用するように設定し、
前記電気モータのロータの回転が正逆いずれの方向であっても、該ロータに作用するスラスト荷重が所定の一方向となるように設定した、
ことを特徴とする電気自動車用ドライブユニット。 - 電気モータと、第1及び第2のプラネタリギヤを軸方向に並設したプラネタリギヤユニットと、を備え、電気モータの回転を、ヘリカルギヤからなる前記プラネタリギヤユニットを介して出力軸に伝達してなる、電気自動車用ドライブユニットにおいて、
前記電気モータのロータが、前記第1のプラネタリギヤにおける入力要素に一体に結合し、
該第1のプラネタリギヤによる減速を介して第2のプラネタリギヤに伝達することにより、該第2のプラネタリギヤに作用するスラスト荷重を前記第1のプラネタリギヤに作用するスラスト荷重より大きく設定し、
前記第1のプラネタリギヤの入力要素がサンギヤであり、前記第2のプラネタリギヤの入力要素がサンギヤでありかつ該サンギヤが前記第1のプラネタリギヤの出力要素に一体に連結され、
回転自在に支持されているシャフトに前記ロータを一体に結合し、
前記第1のプラネタリギヤのサンギヤを前記シャフトに一体に形成し、前記第2のプラネタリギヤのサンギヤを前記シャフトに回転自在に支持すると共に該シャフトに形成した段部にスラストベアリングを介して当接して、
前記第1及び第2のプラネタリギヤのヘリカルギヤの捩れ角方向を、前記ロータが正逆いずれか一方に回転する場合、前記両サンギヤのスラスト荷重が互に離れる方向に作用して、専ら前記第1のプラネタリギヤのサンギヤのスラスト荷重が、前記シャフトを介して前記ロータに作用し、前記ロータが他方に回転する場合、前記両サンギヤのスラスト荷重が互に押合うように作用して、前記シャフト及びロータに、前記両スラスト荷重の差が作用するように設定し、
前記電気モータのロータの回転が正逆いずれの方向であっても、該ロータに作用するスラスト荷重が所定の一方向となるように設定した、
ことを特徴とする電気自動車用ドライブユニット。 - 前記第1及び第2のプラネタリギヤは、それぞれ入力要素、出力要素及び固定要素を有し、かつ前記各固定要素に、前記ロータの回転が正逆いずれであっても互に逆方向のスラスト荷重が作用してなる、
請求項1又は2記載の電気自動車用ドライブユニット。 - 前記電気モータのロータを支持するロータハブに被検出部を設け、該被検出部を、ケースに装着した回転位置検出手段により検知して前記ロータの回転位置を検出し、
前記ロータの回転が正逆いずれであっても、前記ロータハブに作用するスラスト荷重が、前記回転位置検出手段側に向って作用するように設定してなる、
請求項1ないし3のいずれか記載の電気自動車用ドライブユニット。 - 前記ドライブユニットが、駆動車輪内に配置されかつ前記出力軸を該駆動車輪に連結したインホイールタイプであり、
左右駆動車輪に同じ前記ドライブユニットを配置して、前記左右駆動車輪にて、前記電気モータのロータが互に逆方向に回転してなる、
請求項2記載の電気自動車用ドライブユニット。 - 車輌が前進状態にある場合、前記左右駆動車輪におけるドライブユニットは、いずれも、前記ロータに作用するスラスト荷重が、機体側に向って作用するように設定してなる、
請求項1又は5記載の電気自動車用ドライブユニット。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP20998199A JP4189089B2 (ja) | 1999-07-23 | 1999-07-23 | 電気自動車用ドライブユニット |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP20998199A JP4189089B2 (ja) | 1999-07-23 | 1999-07-23 | 電気自動車用ドライブユニット |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2001032888A JP2001032888A (ja) | 2001-02-06 |
| JP4189089B2 true JP4189089B2 (ja) | 2008-12-03 |
Family
ID=16581892
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP20998199A Expired - Fee Related JP4189089B2 (ja) | 1999-07-23 | 1999-07-23 | 電気自動車用ドライブユニット |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4189089B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102792564A (zh) * | 2011-03-07 | 2012-11-21 | Ntn株式会社 | 电动车用驱动装置 |
Families Citing this family (29)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4348941B2 (ja) | 2002-11-26 | 2009-10-21 | 日産自動車株式会社 | 車輪用回転電機の取付構造 |
| JP2005231564A (ja) * | 2004-02-23 | 2005-09-02 | Ntn Corp | 電動式車輪駆動装置 |
| JP2006290039A (ja) * | 2005-04-06 | 2006-10-26 | Hitachi Constr Mach Co Ltd | 走行装置 |
| JP2007022386A (ja) | 2005-07-19 | 2007-02-01 | Ntn Corp | 電動式車輪駆動装置 |
| JP4894215B2 (ja) | 2005-10-05 | 2012-03-14 | 日産自動車株式会社 | インホイールドライブユニット |
| JP4501910B2 (ja) | 2006-08-11 | 2010-07-14 | トヨタ自動車株式会社 | インホイールモータ車 |
| JP4920456B2 (ja) * | 2007-03-06 | 2012-04-18 | Ntn株式会社 | インホイールモータ駆動装置 |
| WO2008131358A1 (en) * | 2007-04-19 | 2008-10-30 | Bluwav Systems Llc | Wheel motor |
| KR100897092B1 (ko) | 2007-10-18 | 2009-05-14 | 현대자동차주식회사 | 수동변속기의 니들 볼베어링 지지구조 |
| JP2010195316A (ja) * | 2009-02-26 | 2010-09-09 | Nsk Ltd | インホイールモータ及びその製造方法 |
| JP2012163186A (ja) * | 2011-02-09 | 2012-08-30 | Toyota Central R&D Labs Inc | 遊星歯車速度変換機 |
| JP5604338B2 (ja) | 2011-03-07 | 2014-10-08 | Ntn株式会社 | 電気自動車用駆動装置 |
| JP5685111B2 (ja) | 2011-03-07 | 2015-03-18 | Ntn株式会社 | 電気自動車用駆動装置 |
| JP5685113B2 (ja) | 2011-03-07 | 2015-03-18 | Ntn株式会社 | 電気自動車用駆動装置 |
| JP5676314B2 (ja) | 2011-03-07 | 2015-02-25 | Ntn株式会社 | 電気自動車用駆動装置 |
| KR101655402B1 (ko) * | 2011-04-26 | 2016-09-07 | 현대모비스 주식회사 | 인휠 구동장치 |
| JP5913925B2 (ja) * | 2011-11-16 | 2016-04-27 | Ntn株式会社 | インホイール型モータ内蔵車輪用軸受装置 |
| WO2013047695A1 (ja) * | 2011-09-28 | 2013-04-04 | Ntn株式会社 | インホイール型モータ内蔵車輪用軸受装置 |
| JP2013071698A (ja) * | 2011-09-29 | 2013-04-22 | Ntn Corp | 電気自動車用駆動装置 |
| JP5990997B2 (ja) | 2012-02-29 | 2016-09-14 | 日本精工株式会社 | インホイールモータ |
| JP5956552B2 (ja) * | 2014-12-22 | 2016-07-27 | Ntn株式会社 | 電気自動車用駆動装置 |
| CN104696445B (zh) * | 2015-03-19 | 2017-05-03 | 黄玲艳 | 轮边减速器 |
| KR101841009B1 (ko) | 2016-11-01 | 2018-03-23 | 현대모비스 주식회사 | 인휠 구동장치 |
| US11241947B2 (en) * | 2017-10-13 | 2022-02-08 | Aisin Corporation | Vehicle driving device |
| CN111148921A (zh) * | 2017-10-13 | 2020-05-12 | 爱信艾达株式会社 | 车辆用驱动装置 |
| JP2020128788A (ja) * | 2019-02-08 | 2020-08-27 | ジヤトコ株式会社 | 動力伝達装置 |
| CN113612347B (zh) * | 2021-08-27 | 2025-07-08 | 深圳哈工拓普智能传动科技有限公司 | 一种减速器居中布置的直流减速电机 |
| KR102760129B1 (ko) | 2022-03-02 | 2025-01-24 | 현대모비스 주식회사 | 동력 전달 장치 및 그 동력 전달 장치를 포함하는 자동차 |
| IT202300020271A1 (it) * | 2023-10-02 | 2025-04-02 | Iveco Spa | Mozzo ruota a trazione elettrica migliorato |
-
1999
- 1999-07-23 JP JP20998199A patent/JP4189089B2/ja not_active Expired - Fee Related
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102792564A (zh) * | 2011-03-07 | 2012-11-21 | Ntn株式会社 | 电动车用驱动装置 |
| CN102792564B (zh) * | 2011-03-07 | 2016-08-10 | Ntn株式会社 | 电动车用驱动装置 |
| US9705378B2 (en) | 2011-03-07 | 2017-07-11 | Ntn Corporation | Drive device for electric vehicle |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2001032888A (ja) | 2001-02-06 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4189089B2 (ja) | 電気自動車用ドライブユニット | |
| US11091021B2 (en) | Power plant | |
| JP4130154B2 (ja) | 車輌用駆動装置 | |
| CN102844213B (zh) | 包含耦合和解耦装置的机动化轮毂 | |
| CN103373342B (zh) | 区分车轮之间的扭矩的系统和方法 | |
| US20090038866A1 (en) | Power unit | |
| JP2000324612A (ja) | 前後輪駆動車両 | |
| CN102403833B (zh) | 电动车自动变速轮毂电机 | |
| JP3660460B2 (ja) | 電動自転車用駆動装置 | |
| EP3584102A1 (en) | Electric vehicle drive device | |
| WO2005051698A1 (ja) | 車両の駆動機構 | |
| KR101139552B1 (ko) | 변속기 일체형 모터 및 그 제어 방법 | |
| KR20140081351A (ko) | 인휠 모터 어셈블리 | |
| EP2894055B1 (en) | Motor drive unit | |
| JP3515628B2 (ja) | 電気自動車の駆動機構 | |
| JP2545733B2 (ja) | 電気自動車の駆動装置 | |
| JP2014177265A (ja) | 駆動装置 | |
| CN214728160U (zh) | 配备有减速装置的车辆用驱动装置 | |
| CN111497596A (zh) | 一种电动汽车双电机驱动装置 | |
| JP4524536B2 (ja) | 電動式車輪駆動装置 | |
| CN102514677A (zh) | 一种磁控式力矩感应传动系统 | |
| JP2002079838A (ja) | 駆動装置 | |
| WO2005030518A1 (ja) | 電動式車輪駆動装置 | |
| CN202414079U (zh) | 一种磁控式力矩感应传动系统 | |
| CN1315245C (zh) | 轮毂电机 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20051219 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20080411 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20080415 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20080616 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20080909 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20080912 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110919 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110919 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120919 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130919 Year of fee payment: 5 |
|
| LAPS | Cancellation because of no payment of annual fees |