JP4199663B2 - ヒューマン−コンピュータインターフェイスにおける視覚画像による触覚調整 - Google Patents
ヒューマン−コンピュータインターフェイスにおける視覚画像による触覚調整 Download PDFInfo
- Publication number
- JP4199663B2 JP4199663B2 JP2003533168A JP2003533168A JP4199663B2 JP 4199663 B2 JP4199663 B2 JP 4199663B2 JP 2003533168 A JP2003533168 A JP 2003533168A JP 2003533168 A JP2003533168 A JP 2003533168A JP 4199663 B2 JP4199663 B2 JP 4199663B2
- Authority
- JP
- Japan
- Prior art keywords
- haptic
- model
- image
- haptic model
- dimensional
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images













Classifications
-
- G—PHYSICS
- G09—EDUCATION; CRYPTOGRAPHY; DISPLAY; ADVERTISING; SEALS
- G09G—ARRANGEMENTS OR CIRCUITS FOR CONTROL OF INDICATING DEVICES USING STATIC MEANS TO PRESENT VARIABLE INFORMATION
- G09G5/00—Control arrangements or circuits for visual indicators common to cathode-ray tube indicators and other visual indicators
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F17/00—Digital computing or data processing equipment or methods, specially adapted for specific functions
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/016—Input arrangements with force or tactile feedback as computer generated output to the user
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/03—Arrangements for converting the position or the displacement of a member into a coded form
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/048—Interaction techniques based on graphical user interfaces [GUI]
- G06F3/0484—Interaction techniques based on graphical user interfaces [GUI] for the control of specific functions or operations, e.g. selecting or manipulating an object, an image or a displayed text element, setting a parameter value or selecting a range
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T17/00—Three-dimensional [3D] modelling for computer graphics
- G06T17/20—Finite element generation, e.g. wire-frame surface description, tesselation
Landscapes
- Engineering & Computer Science (AREA)
- Theoretical Computer Science (AREA)
- General Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Human Computer Interaction (AREA)
- Software Systems (AREA)
- Computer Graphics (AREA)
- Geometry (AREA)
- Databases & Information Systems (AREA)
- Mathematical Physics (AREA)
- Data Mining & Analysis (AREA)
- Computer Hardware Design (AREA)
- Processing Or Creating Images (AREA)
- User Interface Of Digital Computer (AREA)
Description
1.初期視覚画像から始める。
2.画像内の所望のオブジェクトに位相幾何学的に類似する初期触覚モデルを選択する。
3.画像内のオブジェクトと初期触覚モデルとの間に対応関係基準を確立する。
4.触覚及び視覚空間における対応関係基準が十分に満たされるように、触覚モデルを生成する初期触覚モデルの変形を決定する。
[適切な初期触覚モデルを選択する]
オブジェクトに位相幾何学的に類似する触覚モデルを初期触覚モデルとして選択することができる。全体的なサイズ、回転、スケール、モデル内での相対的なスケール等の属性を本発明に従って変形させて信頼度の高い触覚モデルを生成する。位相幾何学的に類似することにより初期触覚モデルが適切な変形の特徴を確実に備えることができる。例えば、立方体は多くの6面体の初期モデルとして機能することができる、一つの4ドアセダンは多くの4ドアセダンの初期触覚モデルとして機能できる、などといったことが挙げられる。
[対応ポイントを設定する]
一旦、初期触覚モデルが選択されると、初期触覚モデルとオブジェクト画像との間に対応関係を確立することができる。例えば、箱の見える角を立方体初期触覚モデルの角に一致するように設定する。ポイントは、例えば立方体の角として定義される、またはユーザが特定できるようにユーザに委ねられる。ポイントはユーザにより、例えば画像上のポイント及び初期触覚モデル上の該当するポイントを選択することにより設定することができる。ポイントはまた、コンピュータの支援により、例えば画像認識により、或いは一旦対応関係が一連のフレームのうちの一フレームにおいて確立されたときの形状追跡により、該当するポイントを決定することによって設定することもできる。この明細書において使用されるように、対応ポイントはモデルか画像のポイント、モデルか画像の表面、モデルか画像の半径または他のパラメータ、或いはモデルと画像とを接続するものとして特定することができる他の全ての特徴を含む。以下にさらに示す例において視覚空間と触覚空間との間の対応ポイントの確立方法を示す。
[変形触覚モデルを生成する]
次に、初期触覚モデルを変形することにより、画像中のオブジェクト用の信頼度の高い触覚モデルを生成する。この変形は種々の態様にて進行するが、この場合、その変形は、画像平面への生成モデルの投影が画像中のオブジェクトの表示に対応するように初期触覚モデルの変形を決定する目的で行なわれる。一例として、種々の態様で触覚モデルを変形させる一連のパラメータ化された演算Oを定義する。Oにおける演算はモデルとの関係で意味のある変形、例えば種々の軸に沿ったスケール、種々の軸を中心とする回転、モデルを構成する部分の間の相対的スケール、形状間の距離などを含む変形であればどのような変形であっても良い。画像平面への触覚モデルの投影を生成する演算子Pを定義する。次にJが画像中のオブジェクトであり、そしてHが初期触覚モデルであるとすると、問題はP(O(H))がJに近似するようにOに用いられるべき一連のパラメータを見付け出すことである。P(O(H))とJとの間の差をエラーメトリックとして定義すると、最新のコンピュータ技術によりエラーメトリックを最小にするパラメータ解が導出される。例えばFosdick, L.D., E.R. Jessup,C.J.C. Schauble,及びG. Domik [1996]による「高性能科学計算入門」, M.I.T. Press, Cambridge, MA; Mitchell, M. [1998]による「遺伝アルゴリズム入門」,M.I.T. Press, Cambridge, MA; Koza, J., F.H. Bennett III, D.Andre,及びM.A. Keane, [1999]による「遺伝子プログラミングIII−ダーウィンの発明及び問題解決法」, Morgan Kaufmann Publishers, San Francisco, CAを参照されたい。
[画像シーケンスへの拡張]
本発明の方法により画像シーケンスに付随する触覚モデルを効率的に生成することもできる。一般的に、初期触覚モデルはシーケンスの各オブジェクトに対して1度だけ選択する必要がある。対応ポイントは操作者により各画像中に特定される。画像追跡技術は、オブジェクトがシーケンス内で画像毎に変化するのに合わせてポイント位置を追跡することにより、このタスクにおいて操作者に代わって機能し、または操作者をアシストする。また、触覚モデルを生成するために一つの画像に関して設定されたパラメータを使用して隣接画像の触覚モデル変形の解から始めることができるので、必要な解の算出時間を短くすることができる。
[触覚モデルを2D画像と一体化する]
ユーザに提供されるインターフェイスは2つの空間、すなわち視覚空間及び触覚空間を有すると考えることができる。視覚空間はユーザに対する表示で表現され、この場合この表示は視覚空間内のユーザ位置を示す可動矢印のような視覚キューで行なわれる。触覚空間は適切な入出力デバイスにおけるユーザに対する力の伝達で表現され、ユーザに力を伝えて触覚空間の力に対するユーザ位置を示す。本方法により、生成触覚モデルを触覚空間に配置してディスプレイ平面への生成触覚モデルの投影がディスプレイにおけるオブジェクトの視覚表示に対応するようにすることができる。その結果、視覚空間のオブジェクトに近づく視覚カーソルが触覚空間のオブジェクトの触覚モデルに近づく触覚カーソルに一致する。
<実施例>
図3は本発明の一の実施形態を示すフロー図である。この方法は一つの画像または画像シーケンス(301)で始まる。初期触覚モデルを画像認識(302)、手動選択または手動定義(303)、或いはこれらの組み合わせにより選択する。一旦、初期触覚モデルを選択(304)すると、触覚モデルは本画像と一致する(305)ように変形される。
<実施例>
[単一オブジェクト、単一画像の例]
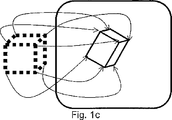
図1(a,b,c,d)は本発明を単一画像中の単一オブジェクトに適用したときの様子を示している。図1bはコンピュータ画面のような表示媒体に表示される画像を示す。オブジェクトは画像において101で示す。この例においては、オブジェクト101は画像中では矩形多面体として示され、観察者に対して回転し、傾いている。図1bは、相互作用するとして定義された6つの面を有する立方体の単純な触覚モデルが力(フォース)フィードバックインターフェイスであることを示している。触覚モデルは立方体角の各々に位置するハンドルを備える。これらのハンドルは共同して立方体の触覚表面を定義することになる。これらのハンドル及びハンドルに従って触覚モデルを変形させる規則は一般的に、触覚モデルが表現するオブジェクトの範囲を決定する。
[単一オブジェクト、画像シーケンスの例]
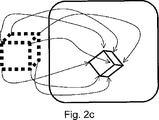
図2(a,b,c,d)は本発明の方法を画像シーケンス中の一オブジェクトに適用したときの様子を示している。オブジェクトは左から右に移動し、そして画像シーケンスの間で回転する。前述同様に、オブジェクトの特徴を表す単純触覚モデルを選択することができる。各画像に対して、単純触覚モデルは図2aに示すようにオブジェクトの特徴との間で確立される対応関係を有する。最新の画像処理技術により、幾つかの後続の画像における対応関係が初期画像に対して確立された対応関係から生成されるので、触覚体験の提示コストをさらに下げることができる。オブジェクトが図2b,2c,2dに示すシーケンスの中で移動し、そして回転すると、触覚モデルが変形されて触覚空間のポイントと視覚画像のポイントとの間の整合が維持される。
[複数オブジェクト画像シーケンスの例]
図4は、異なる視点から眺めたときの、テーブル及び椅子からなる画像シーケンスを示している。図5において3つの椅子及び3つのテーブルにより単純化して示される触覚モデルライブラリを参考にして椅子及びテーブル用の初期触覚モデルを選択することができる。図6は選択された触覚モデルを示している。これらは位相幾何学的に椅子及びテーブルに類似しているが同じではない(限定された範囲の単純化ライブラリを考慮すると)。図7は画像の中のテーブル上のポイントと、選択した触覚モデル上のポイントとの間に確立される対応関係を示している。次に変形を決定して触覚モデルを変形させて画像中のテーブルに一致させる。このプロセスをシーケンスの全ての画像に対して繰り返すことができる。図8は各画像に対するテーブルの変形位置を示している。これらの変形はマットラブ・ソルバー(Matlab solver)により行なった。同様のプロセスを椅子に対して行なう。画像中のオブジェクトの形状が変わらない場合には、同じ初期触覚モデルを各画像に対して使用することができる。対応関係にあるポイントを各画像中に手動にて設定する、または適切な画像処理ソフトウェアにより画像に亘って追跡することができる。
[コンピュータプログラム例]

Claims (29)
- オブジェクトの2次元画像に対応するヒューマン−コンピュータインターフェイスの3次元触覚要素を生成する方法であって、
a)触覚モデルライブラリから前記オブジェクトと位相幾何学的に類似する初期触覚モデルを選択し、
b)3次元初期触覚モデルの一連の対応ポイントと、前記オブジェクトの前記2次元画像の一連の対応ポイントとの間に対応関係を確立し、
c)最終触覚モデルにおける対応ポイントの2次元投影が前記オブジェクトの前記2次元画像における前記対応ポイントと実質的に一致するように前記初期触覚モデルを前記対応関係に基づいて変形させることにより最終触覚モデルを生成することを備える方法。 - 前記ライブラリから選択することは、自動画像認識を使用して前記オブジェクトに類似する2次元投影を有する3次元モデルを選択することを含む、請求項1記載の方法。
- 前記対応関係を確立することは、前記初期触覚モデルの表示がユーザに見えるようにし、そして、前記ユーザから前記初期触覚モデルにおけるポイントの指定を受け入れて前記初期触覚モデルにおけるポイントを前記オブジェクトの表示におけるポイントに一致するように配置することを含む、請求項1記載の方法。
- 前記ユーザから前記初期触覚モデルにおけるポイントの指定を受け入れて前記初期触覚モデルにおけるポイントを前記オブジェクトの表示におけるポイントに一致するように配置することは、カーソルの位置をモニターし、前記触覚モデルにおける前記カーソルの前記位置を前記ユーザからの指示に応答する形の対応ポイントとして特定することを含む、請求項3記載の方法。
- 前記初期触覚モデルを変形させることは、一連のパラメータ化された演算に従って前記初期触覚モデルを変形し、2次元投影における対応ポイントが前記オブジェクトの前記画像における前記対応ポイントの誤差メトリック内に収まる最終触覚モデルを生成する演算パラメータを設定することを含む、請求項1記載の方法。
- 前記一連のパラメータ化された演算が、軸回りの回転、軸方向のスケール、前記モデルの部分間の相対的スケール、及び位置のうちの一つ以上を含む、請求項5記載の方法。
- 前記オブジェクトの前記画像は画像シーケンスのうちの一つであり、方法は更に、前記シーケンスの他の画像におけるオブジェクトの画像に対応ポイントを設定し、前記触覚モデル対応ポイント及び前記シーケンスの前記他の画像の各々における前記オブジェクトに対して設定された前記対応ポイントに従って、前記シーケンスの他の画像のオブジェクトに対する触覚モデルを生成することを備える、請求項1記載の方法。
- 2次元視覚空間及び生成された3次元触覚空間を有するヒューマン−コンピュータインターフェイスを提供する方法であって、
a)触覚モデルライブラリからオブジェクトと位相幾何学的に類似する初期触覚モデルを選択し、
b)3次元初期触覚モデルの一連の対応ポイントと、前記オブジェクトの2次元画像の一連の対応ポイントとの間に対応関係を確立し、
c)最終触覚モデルにおける対応ポイントの2次元投影が実質的に前記オブジェクトの前記2次元画像における前記対応ポイントと一致するように前記初期触覚モデルを前記対応関係に基づいて変形させることにより最終触覚モデルを生成し、
d)前記触覚空間における触覚カーソルと前記視覚空間における視覚カーソルとの間に対応関係を確立し、
e)ユーザによる入力に応答して触覚カーソル位置及び視覚カーソル位置を変化させ、
f)前記触覚モデル及び前記触覚モデルに対する前記触覚カーソルの位置に従って前記ユーザにフォースフィードバックを提供することを備える方法。 - 方法は更に、前記視覚カーソルの前記位置を前記2次元画像に重ねられたカーソルグラフィックにより前記ユーザに対して表示し、前記触覚モデルに対する前記触覚カーソルの前記位置に応じて前記カーソルグラフィックを変化させることを備える、請求項8記載の方法。
- フォースフィードバックを提供することは、前記2次元画像に対応する前記触覚モデルの前記2次元投影に前記触覚カーソルの前記位置を設定し、前記触覚カーソルが最初に触れる前記触覚モデルの一部の前記触覚空間における奥行きとなるように、前記触覚カーソルの投影に対する奥行きを設定することを含む、請求項8記載の方法。
- 視覚画像におけるオブジェクトに対応する触覚モデルを生成する方法であって、
a)一連の触覚モデルから触覚モデルを選択し、ここで、前記選択した触覚モデルが前記オブジェクトの所望の触覚形態に近似し、
b)前記選択した触覚モデルの特徴と前記画像における前記オブジェクトの表示との間に対応関係を確立し、
c)前記選択した触覚モデルを前記対応関係に基づいて変形させることにより触覚モデルを生成することを備える方法。 - 前記一連の触覚モデルは複数の触覚モデルを含み、これらの複数の触覚モデルの各々はオブジェクトのクラスに関連し、かつ前記関連クラス内のオブジェクトの触覚知覚範囲内で触覚モデルを生成するように調整可能な単純化触覚モデルを表す、請求項11記載の方法。
- 前記画像は2次元画像を含む、請求項11記載の方法。
- 前記画像は2次元画像シーケンス内の2次元画像を含む、請求項11記載の方法。
- 前記一連の触覚モデルにおける触覚モデルはハンドルを含み、対応関係を確立することは、前記画像における前記オブジェクトの表示の中に、前記触覚モデルの前記ハンドルに対応するインデックスポイントを特定することを含む、請求項11記載の方法。
- 前記ハンドルは前記触覚モデルの不連続ポイントを含む、請求項15記載の方法。
- 前記ハンドルは前記触覚モデルのスケールを特定するポイントを含む、請求項15記載の方法。
- 前記ハンドルは前記触覚モデルの回転を特定するポイントを含む、請求項15記載の方法。
- 触覚モデルを生成することは、
a)前記オブジェクトの前記表示における前記インデックスポイントからなる画像におけるロケーションから前記選択した触覚モデルの前記ハンドルからなる触覚空間におけるロケーションを設定し、
b)前記ハンドルからなる触覚空間における前記ロケーション及び前記選択した触覚モデルから触覚モデルを生成することを含む、請求項15記載の方法。 - 前記触覚モデルを生成することは、前記触覚空間における前記生成した触覚モデルの前記ハンドルのロケーションが前記画像における前記オブジェクトの表示の前記インデックスポイントのロケーションに対応するように、前記選択した触覚モデルを調整することにより触覚モデルを生成することを含む、請求項15記載の方法。
- 前記選択した触覚モデルを調整することは、前記触覚モデルをスケーリングする、前記触覚モデルをポジショニングする、前記触覚モデルを回転させる、前記触覚モデルをストレッチさせる、前記触覚モデルを捻る、及び前記触覚モデルを変形することのうちの少なくとも一つを含む、請求項20記載の方法。
- 視覚画像シーケンスにおける一のオブジェクトに対応する触覚モデルを生成する方法であって、
a)一連の触覚モデルからある触覚モデルを選択し、ここで、前記選択した触覚モデルが前記オブジェクトの所望の触覚形態に近似しており、
b)前記選択した触覚モデルの特徴と前記シーケンスの第1画像における前記オブジェクトの表示との間に対応関係を確立し、
c)前記選択した触覚モデルを前記対応関係に基づいて変形させることにより前記第1画像の触覚モデルを生成し、
d)前記シーケンスの第2画像における前記オブジェクトの表示の変化を求め、
e)前記選択した触覚モデルを前記対応関係に基づいて変形させることにより前記第2画像の触覚モデルを生成することを備える方法。 - 視覚画像の複数のオブジェクトに対応する触覚モデルを生成する方法であって、前記視覚画像の各オブジェクトに対して、
a)一連の触覚モデルから触覚モデルを選択し、ここで、前記選択した触覚モデルが前記オブジェクトの所望の触覚形態に近似しており、
b)前記選択した触覚モデルの特徴と前記画像における前記オブジェクトの表示との間に対応関係を確立し、
c)前記選択した触覚モデルを前記対応関係に基づいて変形させることにより触覚モデルを生成することを備える方法。 - オブジェクトの2次元画像に対応するヒューマン−コンピュータインターフェイスの3次元触覚要素を生成する方法であって、
a)触覚モデルライブラリから前記オブジェクトと位相幾何学的に類似する初期触覚モデルを選択し、
b)3次元初期触覚モデルの一連の対応ポイントと前記オブジェクトの前記2次元画像の一連の対応ポイントとの間に対応関係を確立し、
c)触覚モデルの2次元投影と前記オブジェクトの前記2次元画像との間のエラーを求め、ここで、前記触覚モデルが一連のパラメータ化した演算を前記初期触覚モデルに適用することにより決定され、
d)エラー許容範囲内のエラーに対応する触覚モデルを生成する、前記パラメータ化された演算に対するパラメータを前記対応関係に基づいて設定することを備える方法。 - 2次元画像に対応するヒューマン−コンピュータインターフェイスの3次元触覚要素を生成する方法であって、
a)触覚モデルライブラリから前記オブジェクトと位相幾何学的に類似する3次元触覚モデルを選択し、
b)前記2次元画像との相互作用が前記3次元触覚モデルとの相互作用にリンクするように、前記2次元画像と前記3次元触覚モデルとの間に関係を確立し、
c)前記選択した触覚モデルを前記関係に基づいて変形させることにより3次元触覚要素を生成することを備える方法。 - 前記2次元画像との相互作用は、ユーザによる入力デバイスの操作に応答する前記画像の視覚表示におけるカーソルの動きを含み、前記3次元触覚モデルとの相互作用は、ユーザによる入力デバイスの操作に応答して前記入力デバイスにフィードバックされるフォースを含む、請求項25記載の方法。
- ユーザが前記3次元触覚モデルに加えるフォースが前記2次元画像の表示に影響するように相互作用がリンクされる、請求項25記載の方法。
- 前記関係を確立することは、前記3次元触覚モデルと前記2次元画像との間の知覚的不一致が最小化されるように、前記3次元触覚モデルと前記2次元画像との間に対応関係を確立することを含む、請求項25記載の方法。
- 前記関係を確立することは、前記画像の平面への前記触覚モデルの2次元投影と前記2次元画像との間の相違を表すエラーが最小化されるように、前記3次元触覚モデルと前記2次元画像との間に対応関係を確立することを含む、請求項25記載の方法。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US09/971,379 US7225115B2 (en) | 2001-10-04 | 2001-10-04 | Coordinating haptics with visual images in a human-computer interface |
| PCT/US2002/031536 WO2003030037A1 (en) | 2001-10-04 | 2002-10-02 | Coordinating haptics with visual images in a human-computer interface |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2005505060A JP2005505060A (ja) | 2005-02-17 |
| JP4199663B2 true JP4199663B2 (ja) | 2008-12-17 |
Family
ID=25518303
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2003533168A Expired - Fee Related JP4199663B2 (ja) | 2001-10-04 | 2002-10-02 | ヒューマン−コンピュータインターフェイスにおける視覚画像による触覚調整 |
Country Status (7)
| Country | Link |
|---|---|
| US (2) | US7225115B2 (ja) |
| EP (1) | EP1444615A4 (ja) |
| JP (1) | JP4199663B2 (ja) |
| KR (1) | KR20040048932A (ja) |
| CN (1) | CN1659551A (ja) |
| CA (1) | CA2461724A1 (ja) |
| WO (1) | WO2003030037A1 (ja) |
Families Citing this family (31)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6985145B2 (en) * | 2001-11-09 | 2006-01-10 | Nextengine, Inc. | Graphical interface for manipulation of 3D models |
| US11202676B2 (en) | 2002-03-06 | 2021-12-21 | Mako Surgical Corp. | Neural monitor-based dynamic haptics |
| US8996169B2 (en) | 2011-12-29 | 2015-03-31 | Mako Surgical Corp. | Neural monitor-based dynamic haptics |
| US7206627B2 (en) | 2002-03-06 | 2007-04-17 | Z-Kat, Inc. | System and method for intra-operative haptic planning of a medical procedure |
| US8010180B2 (en) * | 2002-03-06 | 2011-08-30 | Mako Surgical Corp. | Haptic guidance system and method |
| US7181685B2 (en) * | 2004-03-24 | 2007-02-20 | Rex Sandwith | XML generator for objects with binary branching topology |
| WO2007110005A1 (de) * | 2006-03-28 | 2007-10-04 | Siemens Aktiengesellschaft | Verfahren zum projektieren einer technischen anlage unter berücksichtigung von topologie und visualisierungsvorgaben |
| KR100860412B1 (ko) * | 2007-02-02 | 2008-09-26 | 한국전자통신연구원 | 촉각체험 서비스 방법 및 그 시스템 |
| KR100835297B1 (ko) * | 2007-03-02 | 2008-06-05 | 광주과학기술원 | 촉감 정보 표현을 위한 노드 구조 및 이를 이용한 촉감정보 전송 방법과 시스템 |
| BRPI0804355A2 (pt) * | 2008-03-10 | 2009-11-03 | Lg Electronics Inc | terminal e método de controle do mesmo |
| US20090251421A1 (en) * | 2008-04-08 | 2009-10-08 | Sony Ericsson Mobile Communications Ab | Method and apparatus for tactile perception of digital images |
| EP3220616B1 (en) | 2008-07-15 | 2019-09-04 | Immersion Corporation | Systems and methods for haptic message transmission |
| US20100214243A1 (en) * | 2008-07-15 | 2010-08-26 | Immersion Corporation | Systems and Methods For Interpreting Physical Interactions With A Graphical User Interface |
| US8009022B2 (en) * | 2009-05-29 | 2011-08-30 | Microsoft Corporation | Systems and methods for immersive interaction with virtual objects |
| KR20110051044A (ko) * | 2009-11-09 | 2011-05-17 | 광주과학기술원 | 사용자에게 3차원 객체의 촉감 정보를 제공하는 방법 및 장치 |
| US9384308B2 (en) * | 2010-01-05 | 2016-07-05 | Bentley Systems, Inc. | Multi-dimensional artifact assemblage for infrastructure and other assets with interface node mediators |
| US20120327006A1 (en) * | 2010-05-21 | 2012-12-27 | Disney Enterprises, Inc. | Using tactile feedback to provide spatial awareness |
| US8297435B2 (en) | 2010-06-22 | 2012-10-30 | Ncr Corporation | Methods and apparatus for germicidal irradiation of checkout system surfaces |
| US8798534B2 (en) | 2010-07-09 | 2014-08-05 | Digimarc Corporation | Mobile devices and methods employing haptics |
| US8710968B2 (en) | 2010-10-07 | 2014-04-29 | Motorola Mobility Llc | System and method for outputting virtual textures in electronic devices |
| US8716973B1 (en) | 2011-02-28 | 2014-05-06 | Moog Inc. | Haptic user interface |
| WO2013068860A1 (en) * | 2011-11-08 | 2013-05-16 | Koninklijke Philips Electronics N.V. | Interacting with a three-dimensional object dataset |
| US8493354B1 (en) | 2012-08-23 | 2013-07-23 | Immersion Corporation | Interactivity model for shared feedback on mobile devices |
| US8711118B2 (en) | 2012-02-15 | 2014-04-29 | Immersion Corporation | Interactivity model for shared feedback on mobile devices |
| US8570296B2 (en) | 2012-05-16 | 2013-10-29 | Immersion Corporation | System and method for display of multiple data channels on a single haptic display |
| US9280206B2 (en) * | 2012-08-20 | 2016-03-08 | Samsung Electronics Co., Ltd. | System and method for perceiving images with multimodal feedback |
| WO2014147443A1 (en) * | 2013-03-20 | 2014-09-25 | Nokia Corporation | A touch display device with tactile feedback |
| US9946348B2 (en) * | 2014-03-21 | 2018-04-17 | Immersion Corporation | Automatic tuning of haptic effects |
| CN107566847B (zh) * | 2017-09-18 | 2020-02-14 | 浙江大学 | 一种将触感数据编码为视频流进行保存和传输的方法 |
| US11036391B2 (en) * | 2018-05-16 | 2021-06-15 | Universal Studios LLC | Haptic feedback systems and methods for an amusement park ride |
| CN109947793B (zh) * | 2019-03-20 | 2022-05-31 | 深圳市北斗智能科技有限公司 | 伴随关系的分析方法、装置和存储介质 |
Family Cites Families (36)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5714977A (en) | 1988-02-24 | 1998-02-03 | Quantel Limited | Video processing system for movement simulation |
| FR2646575A1 (fr) * | 1989-04-26 | 1990-11-02 | Labo Electronique Physique | Procede et structure pour la compression de donnees |
| US5065040A (en) * | 1990-08-03 | 1991-11-12 | Motorola Inc. | Reverse flow neuron |
| US5386507A (en) | 1991-07-18 | 1995-01-31 | Teig; Steven L. | Computer graphics system for selectively modelling molecules and investigating the chemical and physical properties thereof |
| US5889670A (en) * | 1991-10-24 | 1999-03-30 | Immersion Corporation | Method and apparatus for tactilely responsive user interface |
| US5296871A (en) * | 1992-07-27 | 1994-03-22 | Paley W Bradford | Three-dimensional mouse with tactile feedback |
| US6131097A (en) * | 1992-12-02 | 2000-10-10 | Immersion Corporation | Haptic authoring |
| US5389865A (en) * | 1992-12-02 | 1995-02-14 | Cybernet Systems Corporation | Method and system for providing a tactile virtual reality and manipulator defining an interface device therefor |
| US5629594A (en) * | 1992-12-02 | 1997-05-13 | Cybernet Systems Corporation | Force feedback system |
| US5734373A (en) * | 1993-07-16 | 1998-03-31 | Immersion Human Interface Corporation | Method and apparatus for controlling force feedback interface systems utilizing a host computer |
| US5731804A (en) | 1995-01-18 | 1998-03-24 | Immersion Human Interface Corp. | Method and apparatus for providing high bandwidth, low noise mechanical I/O for computer systems |
| US5739811A (en) * | 1993-07-16 | 1998-04-14 | Immersion Human Interface Corporation | Method and apparatus for controlling human-computer interface systems providing force feedback |
| WO1995002801A1 (en) * | 1993-07-16 | 1995-01-26 | Immersion Human Interface | Three-dimensional mechanical mouse |
| US5436638A (en) * | 1993-12-17 | 1995-07-25 | Fakespace, Inc. | Image display method and apparatus with means for yoking viewpoint orienting muscles of a user |
| US5574387A (en) * | 1994-06-30 | 1996-11-12 | Siemens Corporate Research, Inc. | Radial basis function neural network autoassociator and method for induction motor monitoring |
| US6166723A (en) | 1995-11-17 | 2000-12-26 | Immersion Corporation | Mouse interface device providing force feedback |
| US5905499A (en) * | 1995-07-05 | 1999-05-18 | Fakespace, Inc. | Method and system for high performance computer-generated virtual environments |
| US5825308A (en) * | 1996-11-26 | 1998-10-20 | Immersion Human Interface Corporation | Force feedback interface having isotonic and isometric functionality |
| US6169540B1 (en) | 1995-12-01 | 2001-01-02 | Immersion Corporation | Method and apparatus for designing force sensations in force feedback applications |
| US6147674A (en) | 1995-12-01 | 2000-11-14 | Immersion Corporation | Method and apparatus for designing force sensations in force feedback computer applications |
| US5956484A (en) * | 1995-12-13 | 1999-09-21 | Immersion Corporation | Method and apparatus for providing force feedback over a computer network |
| US6028593A (en) * | 1995-12-01 | 2000-02-22 | Immersion Corporation | Method and apparatus for providing simulated physical interactions within computer generated environments |
| US6161126A (en) | 1995-12-13 | 2000-12-12 | Immersion Corporation | Implementing force feedback over the World Wide Web and other computer networks |
| US6075502A (en) * | 1996-07-17 | 2000-06-13 | Fakespace, Inc. | Adjustable immersive projection table |
| US6125385A (en) * | 1996-08-01 | 2000-09-26 | Immersion Corporation | Force feedback implementation in web pages |
| US5859642A (en) * | 1996-09-26 | 1999-01-12 | Sandia Corporation | Virtual button interface |
| US6535241B1 (en) * | 1996-11-13 | 2003-03-18 | Fakespace Labs, Inc. | Multi-person stereo display system |
| US6154201A (en) | 1996-11-26 | 2000-11-28 | Immersion Corporation | Control knob with multiple degrees of freedom and force feedback |
| US5990900A (en) * | 1997-12-24 | 1999-11-23 | Be There Now, Inc. | Two-dimensional to three-dimensional image converting system |
| US6421048B1 (en) * | 1998-07-17 | 2002-07-16 | Sensable Technologies, Inc. | Systems and methods for interacting with virtual objects in a haptic virtual reality environment |
| JP4100531B2 (ja) * | 1998-08-11 | 2008-06-11 | 株式会社東京大学Tlo | 情報提示方法及び装置 |
| US6659939B2 (en) * | 1998-11-20 | 2003-12-09 | Intuitive Surgical, Inc. | Cooperative minimally invasive telesurgical system |
| US6650338B1 (en) * | 1998-11-24 | 2003-11-18 | Interval Research Corporation | Haptic interaction with video and image data |
| US6522906B1 (en) * | 1998-12-08 | 2003-02-18 | Intuitive Surgical, Inc. | Devices and methods for presenting and regulating auxiliary information on an image display of a telesurgical system to assist an operator in performing a surgical procedure |
| FR2808366B1 (fr) * | 2000-04-26 | 2003-12-19 | Univ Paris Vii Denis Diderot | Procede et systeme d'apprentissage en realite virtuelle, et application en odontologie |
| US6801187B2 (en) * | 2001-06-22 | 2004-10-05 | Ford Global Technologies, Llc | System and method of interactive evaluation and manipulation of a geometric model |
-
2001
- 2001-10-04 US US09/971,379 patent/US7225115B2/en not_active Expired - Lifetime
-
2002
- 2002-10-02 JP JP2003533168A patent/JP4199663B2/ja not_active Expired - Fee Related
- 2002-10-02 WO PCT/US2002/031536 patent/WO2003030037A1/en not_active Ceased
- 2002-10-02 KR KR10-2004-7004961A patent/KR20040048932A/ko not_active Ceased
- 2002-10-02 CA CA002461724A patent/CA2461724A1/en not_active Abandoned
- 2002-10-02 CN CN028190416A patent/CN1659551A/zh active Pending
- 2002-10-02 EP EP02766477A patent/EP1444615A4/en not_active Withdrawn
-
2007
- 2007-05-26 US US11/754,279 patent/US20070296692A1/en not_active Abandoned
Also Published As
| Publication number | Publication date |
|---|---|
| US20070296692A1 (en) | 2007-12-27 |
| CA2461724A1 (en) | 2003-04-10 |
| WO2003030037A1 (en) | 2003-04-10 |
| US7225115B2 (en) | 2007-05-29 |
| KR20040048932A (ko) | 2004-06-10 |
| EP1444615A4 (en) | 2008-12-03 |
| CN1659551A (zh) | 2005-08-24 |
| JP2005505060A (ja) | 2005-02-17 |
| US20030100969A1 (en) | 2003-05-29 |
| EP1444615A1 (en) | 2004-08-11 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4199663B2 (ja) | ヒューマン−コンピュータインターフェイスにおける視覚画像による触覚調整 | |
| Gregory et al. | intouch: Interactive multiresolution modeling and 3d painting with a haptic interface | |
| JP5385921B2 (ja) | 可視率を利用するモデルのサイズ縮小 | |
| US7728848B2 (en) | Tools for 3D mesh and texture manipulation | |
| Tolba et al. | A projective drawing system | |
| US8791958B2 (en) | Method, apparatus, and program for displaying an object on a computer screen | |
| US20220122303A1 (en) | Intuitive 3d transformations for 2d graphics | |
| CN114648619A (zh) | 用于通过使用虚拟3d网格和手绘草图来设计3d对象的方法 | |
| WO2021154101A1 (en) | Software broker for assets managed with nested instancing | |
| Akeo et al. | Computer Graphics System for Reproducing Three‐Dimensional Shape from Idea Sketch | |
| Santos et al. | 3D Interactive Augmented Reality in Early Stages of Product Design. | |
| Dani et al. | COVIRDS: a conceptual virtual design system | |
| Fiorentino et al. | Surface design in virtual reality as industrial application | |
| US20080252661A1 (en) | Interface for Computer Controllers | |
| Levene | A framework for non-realistic projections | |
| US8890889B1 (en) | System and method for generating a pose of an object | |
| JP2001209826A (ja) | 仮想空間の編集方法、仮想空間の編集装置、コンピュータプログラム記憶媒体および仮想現実感提示装置 | |
| JPH0935087A (ja) | 陰影処理方法及び装置 | |
| CN117853320B (zh) | 一种基于多媒体操控的图像映射方法、系统及存储介质 | |
| JPH07271998A (ja) | 立体表示方法および装置 | |
| Perles et al. | Interactive virtual tools for manipulating NURBS surfaces in a virtual environment | |
| Fei et al. | 3d animation creation using space canvases for free-hand drawing | |
| CN118411498A (zh) | 一种虚拟空间中的图像处理方法、装置和电子设备 | |
| Zhen et al. | Research and implementation of modeling in virtual environment based on OpenGL | |
| JPH08235382A (ja) | 3次元コンピュータグラフィックス編集装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20050916 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20070925 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20071225 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20080107 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20080321 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20080916 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20081003 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20111010 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |