JP4229096B2 - 加速度センサ及び磁気ディスクドライブ装置 - Google Patents
加速度センサ及び磁気ディスクドライブ装置 Download PDFInfo
- Publication number
- JP4229096B2 JP4229096B2 JP2005211166A JP2005211166A JP4229096B2 JP 4229096 B2 JP4229096 B2 JP 4229096B2 JP 2005211166 A JP2005211166 A JP 2005211166A JP 2005211166 A JP2005211166 A JP 2005211166A JP 4229096 B2 JP4229096 B2 JP 4229096B2
- Authority
- JP
- Japan
- Prior art keywords
- magnetic field
- pair
- acceleration
- acceleration sensor
- field detection
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 230000005291 magnetic effect Effects 0.000 title claims description 345
- 230000001133 acceleration Effects 0.000 title claims description 153
- 238000001514 detection method Methods 0.000 claims description 140
- 230000005415 magnetization Effects 0.000 claims description 56
- 230000000694 effects Effects 0.000 claims description 21
- 239000000696 magnetic material Substances 0.000 claims description 8
- 239000000758 substrate Substances 0.000 claims description 8
- 239000004020 conductor Substances 0.000 claims description 5
- 238000004519 manufacturing process Methods 0.000 claims description 4
- 238000003475 lamination Methods 0.000 claims description 3
- 239000010410 layer Substances 0.000 description 50
- 230000035945 sensitivity Effects 0.000 description 11
- 239000000463 material Substances 0.000 description 9
- 125000006850 spacer group Chemical group 0.000 description 8
- 239000000853 adhesive Substances 0.000 description 7
- 230000001070 adhesive effect Effects 0.000 description 7
- 238000010586 diagram Methods 0.000 description 4
- 239000002885 antiferromagnetic material Substances 0.000 description 3
- 238000005452 bending Methods 0.000 description 3
- 239000012141 concentrate Substances 0.000 description 3
- 230000005684 electric field Effects 0.000 description 3
- 230000005294 ferromagnetic effect Effects 0.000 description 3
- 239000003302 ferromagnetic material Substances 0.000 description 3
- 239000002184 metal Substances 0.000 description 3
- 229910052751 metal Inorganic materials 0.000 description 3
- 230000004048 modification Effects 0.000 description 3
- 238000012986 modification Methods 0.000 description 3
- 239000011347 resin Substances 0.000 description 3
- 229920005989 resin Polymers 0.000 description 3
- 229910001220 stainless steel Inorganic materials 0.000 description 3
- 239000010935 stainless steel Substances 0.000 description 3
- 229910000859 α-Fe Inorganic materials 0.000 description 3
- 229910018072 Al 2 O 3 Inorganic materials 0.000 description 2
- 239000004642 Polyimide Substances 0.000 description 2
- 210000000078 claw Anatomy 0.000 description 2
- 238000006073 displacement reaction Methods 0.000 description 2
- 230000005484 gravity Effects 0.000 description 2
- 229920001721 polyimide Polymers 0.000 description 2
- 229910001030 Iron–nickel alloy Inorganic materials 0.000 description 1
- 230000001413 cellular effect Effects 0.000 description 1
- PCHJSUWPFVWCPO-UHFFFAOYSA-N gold Chemical compound [Au] PCHJSUWPFVWCPO-UHFFFAOYSA-N 0.000 description 1
- 239000010931 gold Substances 0.000 description 1
- 229910052737 gold Inorganic materials 0.000 description 1
- 230000002452 interceptive effect Effects 0.000 description 1
- 239000007769 metal material Substances 0.000 description 1
- 239000002356 single layer Substances 0.000 description 1
Images












Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01P—MEASURING LINEAR OR ANGULAR SPEED, ACCELERATION, DECELERATION, OR SHOCK; INDICATING PRESENCE, ABSENCE, OR DIRECTION, OF MOVEMENT
- G01P15/00—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration
- G01P15/18—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration in two or more dimensions
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01P—MEASURING LINEAR OR ANGULAR SPEED, ACCELERATION, DECELERATION, OR SHOCK; INDICATING PRESENCE, ABSENCE, OR DIRECTION, OF MOVEMENT
- G01P15/00—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration
- G01P15/02—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses
- G01P15/08—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses with conversion into electric or magnetic values
- G01P15/105—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses with conversion into electric or magnetic values by magnetically sensitive devices
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01P—MEASURING LINEAR OR ANGULAR SPEED, ACCELERATION, DECELERATION, OR SHOCK; INDICATING PRESENCE, ABSENCE, OR DIRECTION, OF MOVEMENT
- G01P15/00—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration
- G01P15/02—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses
- G01P15/08—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses with conversion into electric or magnetic values
- G01P15/11—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses with conversion into electric or magnetic values by inductive pick-up
-
- G—PHYSICS
- G11—INFORMATION STORAGE
- G11B—INFORMATION STORAGE BASED ON RELATIVE MOVEMENT BETWEEN RECORD CARRIER AND TRANSDUCER
- G11B19/00—Driving, starting, stopping record carriers not specifically of filamentary or web form, or of supports therefor; Control thereof; Control of operating function ; Driving both disc and head
- G11B19/02—Control of operating function, e.g. switching from recording to reproducing
- G11B19/04—Arrangements for preventing, inhibiting, or warning against double recording on the same blank or against other recording or reproducing malfunctions
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01P—MEASURING LINEAR OR ANGULAR SPEED, ACCELERATION, DECELERATION, OR SHOCK; INDICATING PRESENCE, ABSENCE, OR DIRECTION, OF MOVEMENT
- G01P15/00—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration
- G01P15/02—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses
- G01P15/08—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses with conversion into electric or magnetic values
- G01P2015/0805—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses with conversion into electric or magnetic values being provided with a particular type of spring-mass-system for defining the displacement of a seismic mass due to an external acceleration
- G01P2015/0822—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses with conversion into electric or magnetic values being provided with a particular type of spring-mass-system for defining the displacement of a seismic mass due to an external acceleration for defining out-of-plane movement of the mass
- G01P2015/084—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses with conversion into electric or magnetic values being provided with a particular type of spring-mass-system for defining the displacement of a seismic mass due to an external acceleration for defining out-of-plane movement of the mass the mass being suspended at more than one of its sides, e.g. membrane-type suspension, so as to permit multi-axis movement of the mass
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Hall/Mr Elements (AREA)
- Measuring Magnetic Variables (AREA)
Description
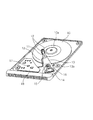
10a 退避ゾーン
11 HGA
12 FPC
13 支持アーム
13a 爪
14 VCM
15 回動軸
16 退避ランプ
17 加速度センサ
18 回路基板
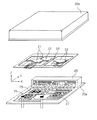
20 ハウジング部材
20a 配線基板
20b カバー部材
21 第1のばね部材
21a 第1の外枠部
21b、21c、21d、21e、22c 支持アーム部
21f 可動部
22 第2のばね部材
22a 第2の外枠部
22b 固定辺
23 第1の磁界発生錘部材
23a、23b、23c、23d、24a、24b 永久磁石
23e、24c ベース部材
23f、24d スペーサ部材
24 第2の磁界発生錘部材
25、25′、25″ 第1の磁界検出センサチップ
25a、25a′、25a″、25b、25b′、25b″、25c、25d、26a、26b、26c、26d、27a、27b、27c、27d スピンバルブGMR素子
26 第2の磁界検出センサチップ
27 第3の磁界検出センサチップ
28 ICチップ
28a 端子電極
29、30 接続パッド
31 リード導体パターン
32a′、32b′ 外部抵抗
33a″、33b″ 定電流源
Sa、Sb、Sc、Sd 信号端子電極
Vcc 電源端子電極
GND 接地端子電極
Claims (18)
- ハウジング部材と、該ハウジング部材に取り付けられており、少なくとも検出すべき加速度の方向に自由度を有するばね部材と、該ばね部材の可動位置に固着された磁界発生錘部材と、該磁界発生錘部材に対向して前記ハウジング部材に取り付けられている少なくとも1つの磁界検出センサとを備えており、該磁界検出センサが磁化固定層及び磁化自由層を含みかつ該磁化固定層が検出すべき加速度の方向と平行な方向に磁化固定された少なくとも1対の多層構造磁気抵抗効果素子を備えており、前記磁界発生錘部材が、前記磁界検出センサに対向する面が互いに逆極性となるように、かつ、対をなす多層構造磁気抵抗効果素子にそれぞれ印加される磁界が互いにほぼ逆方向の磁界となる閉磁路を構成するように並列配置された1対の永久磁石を備えており、前記少なくとも1対の多層構造磁気抵抗効果素子が前記1対の永久磁石にそれぞれ対向して配置されており、該少なくとも1対の多層構造磁気抵抗効果素子が加速度の印加されていない時に積層面とほぼ垂直な方向に磁界が印加されるように前記閉磁路中に配置されていることを特徴とする加速度センサ。
- 前記少なくとも1つの磁界検出センサが少なくとも1対の多層構造磁気抵抗効果素子をそれぞれ備えた2つの磁界検出センサであり、該2つの磁界検出センサの多層構造磁気抵抗効果素子の磁化固定層が該2つの磁界検出センサ相互で互いに直交する方向にそれぞれ磁化固定されていることを特徴とする請求項1に記載の加速度センサ。
- 前記少なくとも1つの磁界検出センサが少なくとも1対の多層構造磁気抵抗効果素子を備えた1つの磁界検出センサであることを特徴とする請求項1に記載の加速度センサ。
- ハウジング部材と、該ハウジング部材に取り付けられており、互いに直交するX軸方向及びY軸方向に自由度を有する第1のばね部材と、前記ハウジング部材に取り付けられており、前記X軸方向及びY軸方向と直交するZ軸方向に自由度を有する第2のばね部材と、前記第1のばね部材の可動位置に固着された第1の磁界発生錘部材と、前記第2のばね部材の可動位置に固着された第2の磁界発生錘部材と、前記第1の磁界発生錘部材に対向して前記ハウジング部材に取り付けられている第1及び第2の磁界検出センサと、前記第2の磁界発生錘部材に対向して前記ハウジング部材に取り付けられている第3の磁界検出センサとを備えており、前記第1及び第2の磁界検出センサの各々が磁化固定層及び磁化自由層を含みかつ該磁化固定層がそれぞれX軸及びY軸方向に磁化固定された少なくとも1対の多層構造磁気抵抗効果素子を備えており、前記第3の磁界検出センサが磁化固定層及び磁化自由層を含みかつX軸又はY軸方向に磁化固定された少なくとも1対の多層構造磁気抵抗効果素子を備えており、前記第1の磁界発生錘部材が、前記第1及び第2の磁界検出センサにそれぞれ対向する面が互いに逆極性となるように、かつ、対をなす多層構造磁気抵抗効果素子にそれぞれ印加される磁界が互いにほぼ逆方向の磁界となる閉磁路を構成するように並列配置された第1及び第2の1対の永久磁石を備えており、前記第1及び第2の磁界検出センサの前記少なくとも1対の多層構造磁気抵抗効果素子が前記第1及び第2の1対の永久磁石にそれぞれ対向して配置されており、該少なくとも1対の多層構造磁気抵抗効果素子が加速度の印加されていない時に積層面とほぼ垂直な方向に磁界が印加されるように前記閉磁路中に配置されており、前記第2の磁界発生錘部材が、前記第3の磁界検出センサに対向する面が互いに逆極性となるように、かつ、対をなす多層構造磁気抵抗効果素子にそれぞれ印加される磁界が互いにほぼ逆方向の磁界となる閉磁路を構成するように並列配置された第3の1対の永久磁石を備えており、前記第3の磁界検出センサの前記少なくとも1対の多層構造磁気抵抗効果素子が前記第3の1対の永久磁石にそれぞれ対向して配置されており、該少なくとも1対の多層構造磁気抵抗効果素子が加速度の印加されていない時に積層面とほぼ垂直な方向に磁界が印加されるように前記閉磁路中に配置されていることを特徴とする加速度センサ。
- 前記少なくとも1対の多層構造磁気抵抗効果素子の磁化固定方向が全て同一の方向であることを特徴とする請求項1から4のいずれか1項に記載の加速度センサ。
- 前記各磁界発生錘部材が、印加される加速度を回転モーメントに変化させるべく前記各ばね部材の一方の面に固着されていることを特徴とする請求項1から5のいずれか1項に記載の加速度センサ。
- 前記少なくとも1対の多層構造磁気抵抗効果素子が、前記各磁界検出センサの前記積層面内において磁化固定方向と垂直方向に延在する少なくとも1つの直線部分を有していることを特徴とする請求項1から6のいずれか1項に記載の加速度センサ。
- 前記少なくとも1対の多層構造磁気抵抗効果素子が、ハーフブリッジ接続された1対の多層構造磁気抵抗効果素子であることを特徴とする請求項1から7のいずれか1項に記載の加速度センサ。
- 前記少なくとも1対の多層構造磁気抵抗効果素子が、フルブリッジ接続された2対の多層構造磁気抵抗効果素子であることを特徴とする請求項1から7のいずれか1項に記載の加速度センサ。
- 前記ばね部材又は前記第1及び第2のばね部材の各々が、加速度の印加されていない時に前記少なくとも1対の多層構造磁気抵抗効果素子の積層面と平行となるように配置されていることを特徴とする請求項1から9のいずれか1項に記載の加速度センサ。
- 前記ばね部材又は前記第1のばね部材が、捩れ動作が可能な少なくとも2つの支持アーム部と、該2つの支持アーム部によって支持されており前記磁界発生錘部材が固着されている可動部とを有していることを特徴とする請求項1から10のいずれか1項に記載の加速度センサ。
- 前記少なくとも2つの支持アーム部が、互いに直交するX軸方向及びY軸方向に沿ってそれぞれ延在しており、各々の一端が前記ハウジング部材に固定された外枠部に結合しており他端が前記可動部に結合している4つの支持アームからなることを特徴とする請求項11に記載の加速度センサ。
- 前記ハウジング部材が、基板と、該基板を覆うカバー部材とを備えており、前記磁界検出センサが該基板に取り付けられていることを特徴とする請求項1から12のいずれか1項に記載の加速度センサ。
- 前記基板が、電源供給端子と、接地端子と、信号出力端子と、該電源供給端子、該接地端子及び該信号出力端子並びに前記各磁界検出センサに電気的に接続された導体パターンとを有する回路基板であることを特徴とする請求項13に記載の加速度センサ。
- 前記少なくとも1対の多層構造磁気抵抗効果素子の出力を増幅する増幅回路を有しており前記導体パターンに電気的に接続されたICチップをさらに備えたことを特徴とする請求項14に記載の加速度センサ。
- 前記カバー部材が、磁性体材料で形成されていることを特徴とする請求項13から15のいずれか1項に記載の加速度センサ。
- 前記各多層構造磁気抵抗効果素子が、巨大磁気抵抗効果素子又はトンネル磁気抵抗効果素子であることを特徴とする請求項1から16のいずれか1項に記載の加速度センサ。
- 請求項1から17のいずれか1項に記載の加速度センサを備えたことを特徴とする磁気ディスクドライブ装置。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005211166A JP4229096B2 (ja) | 2005-07-21 | 2005-07-21 | 加速度センサ及び磁気ディスクドライブ装置 |
| US11/453,090 US7392704B2 (en) | 2005-07-21 | 2006-06-15 | Acceleration sensor and magnetic disk drive apparatus |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005211166A JP4229096B2 (ja) | 2005-07-21 | 2005-07-21 | 加速度センサ及び磁気ディスクドライブ装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2007024818A JP2007024818A (ja) | 2007-02-01 |
| JP4229096B2 true JP4229096B2 (ja) | 2009-02-25 |
Family
ID=37677839
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2005211166A Expired - Fee Related JP4229096B2 (ja) | 2005-07-21 | 2005-07-21 | 加速度センサ及び磁気ディスクドライブ装置 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US7392704B2 (ja) |
| JP (1) | JP4229096B2 (ja) |
Families Citing this family (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007033045A (ja) * | 2005-07-22 | 2007-02-08 | Tdk Corp | 加速度センサ用のばね部材、加速度センサ及び磁気ディスクドライブ装置 |
| JP4460509B2 (ja) * | 2005-08-31 | 2010-05-12 | 新科實業有限公司 | 加速度センサ及びこれを装備した電子装置 |
| US7621185B2 (en) | 2005-07-28 | 2009-11-24 | Sae Magnetics (H.K.) Ltd. | Acceleration sensor and electronic device comprising the same |
| JP2007147304A (ja) * | 2005-11-24 | 2007-06-14 | Tdk Corp | 加速度センサ及び磁気ディスクドライブ装置 |
| JP4367403B2 (ja) * | 2005-11-24 | 2009-11-18 | Tdk株式会社 | 加速度センサ用ばね部材、加速度センサ及び磁気ディスクドライブ装置 |
| JP4222375B2 (ja) * | 2006-02-09 | 2009-02-12 | Tdk株式会社 | 加速度センサ及び磁気ディスクドライブ装置 |
| JP4285488B2 (ja) * | 2006-02-16 | 2009-06-24 | Tdk株式会社 | 加速度センサ及び磁気ディスクドライブ装置 |
| EP2159588A4 (en) * | 2007-06-19 | 2017-11-08 | Alps Electric Co., Ltd. | Magnetic detecting device, method for manufacturing magnetic detecting device, and angle detecting device, position detecting device and magnetic switch using the magnetic detecting device |
| KR20130067336A (ko) * | 2011-11-28 | 2013-06-24 | 삼성전기주식회사 | 관성센서 |
| CN102841217A (zh) * | 2012-09-07 | 2012-12-26 | 中北大学 | 一种巨磁阻效应三轴加速度计 |
| CN104344845B (zh) * | 2014-10-27 | 2016-08-24 | 北京航空航天大学 | 一种用于巨磁电阻传感器动态特性测试的磁场发生方法 |
| US10386204B2 (en) * | 2017-06-28 | 2019-08-20 | Intel Corporation | Integrated sensor and homologous calibration structure for resonant devices |
| CN111521842B (zh) * | 2020-06-18 | 2025-06-20 | 中北大学 | 基于隧道磁阻检测的静电刚度调节z轴谐振式微加速度计 |
| CN112858720A (zh) * | 2021-02-05 | 2021-05-28 | 东南大学 | 一种基于隧穿式磁电阻阵列的差动式mems加速度计 |
| CN112995861B (zh) * | 2021-03-01 | 2022-12-23 | 歌尔微电子股份有限公司 | 传感器和电子设备 |
| US12228621B2 (en) * | 2021-09-20 | 2025-02-18 | Tdk Corporation | Magnetic sensor device |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH077012B2 (ja) * | 1987-08-18 | 1995-01-30 | 富士通株式会社 | 加速度センサ |
| JP2732287B2 (ja) | 1989-03-23 | 1998-03-25 | 東洋通信機株式会社 | 加速度センサ |
| JP2586406B2 (ja) * | 1994-10-27 | 1997-02-26 | 日本電気株式会社 | 静電容量型加速度センサ |
| JPH11352143A (ja) * | 1998-04-06 | 1999-12-24 | Matsushita Electric Ind Co Ltd | 加速度センサ |
| US6252796B1 (en) * | 1998-08-14 | 2001-06-26 | U.S. Philips Corporation | Device comprising a first and a second ferromagnetic layer separated by a non-magnetic spacer layer |
| US6507187B1 (en) * | 1999-08-24 | 2003-01-14 | The United States Of America As Represented By The Administrator Of The National Aeronautics And Space Administration | Ultra-sensitive magnetoresistive displacement sensing device |
| JP4261468B2 (ja) * | 2004-11-18 | 2009-04-30 | Tdk株式会社 | 加速度センサ |
-
2005
- 2005-07-21 JP JP2005211166A patent/JP4229096B2/ja not_active Expired - Fee Related
-
2006
- 2006-06-15 US US11/453,090 patent/US7392704B2/en not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| US7392704B2 (en) | 2008-07-01 |
| US20070017290A1 (en) | 2007-01-25 |
| JP2007024818A (ja) | 2007-02-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4229096B2 (ja) | 加速度センサ及び磁気ディスクドライブ装置 | |
| US7444871B2 (en) | Acceleration sensor and magnetic disk drive apparatus | |
| CN101065721B (zh) | 用于输入设备的磁传感器 | |
| US7444872B2 (en) | Acceleration sensor and magnetic disk drive apparatus | |
| JP4261468B2 (ja) | 加速度センサ | |
| US7523664B2 (en) | Acceleration sensor and magnetic disk drive apparatus | |
| US20070022813A1 (en) | Acceleration sensor, electronic device comprising the same, and acceleration measuring method | |
| US7679865B2 (en) | Spring member for acceleration sensor, acceleration sensor and magnetic disk drive apparatus | |
| JP4367403B2 (ja) | 加速度センサ用ばね部材、加速度センサ及び磁気ディスクドライブ装置 | |
| US7403352B2 (en) | Acceleration sensor and magnetic disk drive apparatus | |
| JP4556933B2 (ja) | 加速度センサ及び磁気ディスクドライブ装置 | |
| JP2005337992A (ja) | 慣性センサ及び慣性センサを有するディスク記録再生装置 | |
| JP2005069963A (ja) | 加速度センサ | |
| JP2005201699A (ja) | 慣性センサ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20080422 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20080805 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20080925 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20081111 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20081124 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20111212 Year of fee payment: 3 |
|
| LAPS | Cancellation because of no payment of annual fees |