JP4239149B2 - 容器の搬送装置 - Google Patents
容器の搬送装置 Download PDFInfo
- Publication number
- JP4239149B2 JP4239149B2 JP2002382251A JP2002382251A JP4239149B2 JP 4239149 B2 JP4239149 B2 JP 4239149B2 JP 2002382251 A JP2002382251 A JP 2002382251A JP 2002382251 A JP2002382251 A JP 2002382251A JP 4239149 B2 JP4239149 B2 JP 4239149B2
- Authority
- JP
- Japan
- Prior art keywords
- chuck
- wheel
- pair
- chuck claws
- arm
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 210000000078 claw Anatomy 0.000 claims description 77
- 230000007246 mechanism Effects 0.000 claims description 23
- 230000002093 peripheral effect Effects 0.000 claims description 8
- 230000000694 effects Effects 0.000 description 4
- 238000000034 method Methods 0.000 description 3
- 235000013405 beer Nutrition 0.000 description 2
- 238000005452 bending Methods 0.000 description 2
- 239000000428 dust Substances 0.000 description 2
- 238000007689 inspection Methods 0.000 description 2
- 229910000831 Steel Inorganic materials 0.000 description 1
- 239000000853 adhesive Substances 0.000 description 1
- 230000001070 adhesive effect Effects 0.000 description 1
- 238000006243 chemical reaction Methods 0.000 description 1
- 238000010227 cup method (microbiological evaluation) Methods 0.000 description 1
- 230000007547 defect Effects 0.000 description 1
- 230000002950 deficient Effects 0.000 description 1
- 238000007599 discharging Methods 0.000 description 1
- 230000001976 improved effect Effects 0.000 description 1
- 239000002184 metal Substances 0.000 description 1
- 230000002265 prevention Effects 0.000 description 1
- 239000004071 soot Substances 0.000 description 1
- 238000001179 sorption measurement Methods 0.000 description 1
- 229910001220 stainless steel Inorganic materials 0.000 description 1
- 239000010935 stainless steel Substances 0.000 description 1
- 239000010959 steel Substances 0.000 description 1
Images




Landscapes
- Filling Of Jars Or Cans And Processes For Cleaning And Sealing Jars (AREA)
- Specific Conveyance Elements (AREA)
Description
【発明の属する技術分野】
本発明は、一対のチャック爪によって容器を掴むようにした容器の搬送装置に関する。
【0002】
【従来の技術】
ビール壜の検査装置等に組み込まれる搬送装置として、壜が嵌り込む多数のポケットが外周に設けられたスターホイールと呼ばれる円盤を回転させつつ、各ポケットにおける壜の保持及び開放を切り替えてスターホイールの回転経路上の適宜の位置で壜の受け渡しを行えるようにしたスターホイール装置が知られている。スターホイール装置における壜の保持手段としては、例えば吸着カップを利用したもの(特許文献1参照)、一対の開閉可能なチャック爪を利用するもの(特許文献2参照)が知られている。
【0003】
【特許文献1】
特開平11−106039号公報
【特許文献2】
特開平10−7243号公報
【発明が解決しようとする課題】
【0004】
吸着カップを利用する方式では、壜に付着した異物、ラベルかす、ラベルの接着剤等が吸着経路に吸い込まれて吸着力が低下し、吸着ミスを起こすおそれもある。破損した壜が紛れ込んだ場合に吸着パッドが損傷して吸着不能となるおそれもある。これらの理由から、スターホイールを高速化すると吸着カップ方式では容器の排出ミス等が多発し、検査装置の効率化に一定の制限が生じる。
【0005】
一方、壜をチャック爪で掴む方式ではラベルかす等の付着の有無に拘わりなく壜を安定して保持できる。従って、スターホイールの高速化を図る場合にはチャック方式を利用することが有利と考えられている。しかしながら、搬送速度を高速化すると不良壜の転倒等の搬送不良が生じることがあり、壜詰まりや壜の破損の影響でチャック爪が変形してチャック装置の動作に支障を来すおそれがある。
【0006】
そこで、本発明はチャック爪の損傷防止効果を高めた容器の搬送装置を提供することを目的とする。
【0007】
【課題を解決するための手段】
以下、本発明について説明する。なお、本発明の理解を容易にするために添付図面の参照符号を括弧書きにて付記するが、それにより本発明が図示の形態に限定されるものではない。
【0008】
本発明の搬送装置は、容器(BT)を受け入れるポケット(2a、3a)が設けられたホイール(2、3)と、前記ホイールと一体回転可能に設けられたチャック装置(5)とを備え、前記チャック装置には、前記容器を把持すべく開閉可能な一対のチャック爪(10)と、前記一対のチャック爪を前記ホイールの中心側の待機位置と前記ホイールの外周側の掴み位置との間で進退させるとともに、前記待機位置では前記一対のチャック爪が開き、前記掴み位置では前記一対のチャック爪が閉じるように前記一対のチャック爪を開閉駆動するチャック駆動機構(11)とが設けられ、前記待機位置においては前記チャック爪の先端が前記ホイールの外周よりも内側の領域に収容され、前記チャック駆動機構は、前記ホイール上にて半径方向に移動可能に支持された可動体(15)と、前記可動体を前記ホイールの半径方向に駆動する駆動手段(16)と、前記可動体に一対のアーム軸(20)を介してそれぞれ回転自在に支持され、外周側の端部(21a)に前記チャック爪が設けられた一対のアーム(21)と、前記ホイールと前記アームとの間に配置されて前記駆動手段によって駆動される前記可動体の往復動作を前記一対のアームの前記アーム軸を中心とした回転運動に変換するカム機構(25、31)とを備えていることにより、上述した課題を解決する。
【0009】
この発明によれば、容器を保持する必要がない待機位置においてはチャック爪の先端がホイール外周よりもホイール中心側に後退しているので、ホイールを利用して壜詰まりや壜の破損からチャック爪を保護し、チャック爪の変形や破損を抑えることができる。従って、チャック爪の損傷防止効果が高まる。また、チャック爪の損傷を抑えることにより、搬送速度の高速化への対応も容易となる。さらに、駆動手段にて可動体をホイールの半径方向に駆動すると、アームが可動体と一体に半径方向に移動しつつ回転してチャック爪が開閉する。カムを利用して運動を変換しているので動作の確実性、信頼性が高い。
【0012】
前記カム機構は、前記ホイールの半径方向に沿ってカム面(35)が形成されたカム部材(31)と、前記アームに設けられて前記カム面と接するカムフォロア(25)とを備えてもよい。この場合は、駆動手段による可動体の駆動方向に沿ってカム面が延びているので、カムフォロアをカム面に対して容易に追従させることができ、機構の簡素化に有利である。
【0013】
前記ホイールの半径方向に沿った前記カム部材の両側縁部に前記カム面がそれぞれ設けられ、前記カムフォロアは前記アーム軸よりも前記ホイールの中心側に突出したアーム後端部(21b)に前記カム部材を挟み込むようにして設けられ、前記一対のアームの前記アーム後端部間にはこれらのアーム後端部を互いに引き寄せる付勢手段(27)が設けられてもよい。
【0014】
この場合には、付勢手段によってアームが互いに開く方向に付勢されると同時に、その付勢手段を利用してカムフォロアをカム面に押し付けることができる。従って、部品点数を減らしてチャック駆動機構の構成をさらに簡素化できる。
【0015】
前記カム面は前記半径方向の外側に向かうほど前記ホイールの周方向に関して互いに離れる方向に突出する拡大部(35b)を備えてもよい。このような態様によれば、駆動手段によって可動体を半径方向外側に駆動するとカムフォロアが拡大部に乗り上げてアームの後端部が押し広げられる。これにより、アーム先端部のチャック爪を閉じることができる。
【0016】
本発明の搬送装置において、前記チャック駆動機構は、前記待機位置から前記掴み位置へ前記一対のチャック爪が移動する際には把持すべき容器の最大径部分を前記チャック爪の先端が通過した後に前記チャック爪が閉じるように前記一対のチャック爪を動作させ、前記掴み位置から前記待機位置へ前記一対のチャック爪が移動する際には、把持すべき容器が前記チャック爪から開放された後に前記チャック爪の先端が前記ホイール内に収容されるように前記一対のチャック爪を動作させることが好ましい。このようにチャック爪を動作させることにより、チャック爪の先端で容器を引っ掛けることなく、容器をポケットに確実に取り込み、またポケットから確実に排出することができる。
【0017】
【発明の実施の形態】
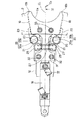
図1〜図3は本発明のチャック装置が適用されたビール壜搬送用のスターホイール装置を示し、図1はホイール内の構成を示す平面図、図2はホイールの情報から見たチャック装置の平面図、図3はチャック装置の側面図である。これらの図から明らかなように、スターホイール装置1は、搬送対象の壜BT(図3参照)を受け入れるポケット2a、3aが周方向に一定のピッチで並べて設けられた上下のホイール2、3と、チャック装置5とを備えている。ホイール2、3は不図示のホイール中心の回りに旋回駆動される。ポケット2a、3aはホイール2、3の外周に略半月状の凹部を形成することによって形成されている。上下のポケット2a、3aの大きさは互いに等しく設定されるか、又は各ポケット2a、3aに対する壜BTの対向部分の形状、直径に応じてポケット2a、3aが互いに異なる大きさや形状に形成される場合もある。上下のホイール2、3の外径は互いに等しい。
【0018】
チャック装置5は、壜BTを把持すべく開閉可能な一対のチャック爪10、10と、一対のチャック爪10をホイール2、3の中心側の待機位置とホイール2、3の外周側の掴み位置との間で進退させるとともに、その進退に連動して開閉させるチャック駆動機構11とを備えている。チャック爪10はステンレス鋼板等の金属鋼板を板金加工して形成されている。左右のチャック爪10は、ポケット2a、3aに保持されるべき壜BTの中心Cbとホイール中心とを結ぶ基準線CLを挟んで対称である。
【0019】
図4及び図5にも示したように、チャック駆動機構11は、下側のホイール3に固定されたベース12と、そのベース12に固定されたガイドブロック13と、ガイドブロック13によってホイール3の半径方向に摺動自在に支持された一対のロッド14、14と、ロッド14、14の先端(図4及び図5において右端)に取り付けられた可動体としてのスライダ15とを備えている。また、チャック駆動機構11には基準線CLに沿って駆動手段としてのエアーシリンダ16が設けられている。エアーシリンダ16のピストンロッド16aは上方からみて基準線CL上を往復移動する。ピストンロッド16aの先端はスイベルジョイント17とボルト18とを介してスライダ15と連結されている。なお、エアーシリンダ16は単動型でもよいし、複動型でもよい。図示の例では複動型のエアーシリンダが使用されている。
【0020】
図4に示すように、スライダ15には一対のアーム軸20、20が基準線CLに関して対称となるように取り付けられている。アーム軸20はホイール2、3の回転中心線と平行な方向に延びている。各アーム軸20にはアーム21が回転自在に取り付けられている。アーム21も基準線CLに関して左右対称である。アーム21の先端部(外周側の端部)21aには肉厚を薄くしたチャック受け部23が設けられている。チャック受け部23の基端部の内側には円柱状に窪んだ受け面21cが形成され、その受け面21cにはチャック爪10の基端側に形成された湾曲部10aが円柱状の押え駒24とボルト24aとを利用して固定されている。なお、湾曲部10aにはボルト24aを通すためのスリットが形成されており、それによりボルト24aを取り外すことなく湾曲部10aを押え駒24と受け面21cとの隙間に対して抜き差しすることができる。
【0021】
アーム21の後端部21bはアーム軸20を越えてホイール中心側(図4において左方)に突出している。図2及び図3に示すように、アーム21の各後端部21bにはカムフォロアとしてのローラ25がアーム軸20と平行なフォロア軸26を中心として回転自在に取り付けられている。さらに、ローラ25の上側にはアーム21の後端部21b同士を互いに引き寄せる付勢手段としての一対のコイルばね27、27が架け渡されている。これらのコイルばね27の引張力によりアーム21、21はアーム軸20を中心として互いのチャック受け部23が開く方向(基準線CLから遠ざかる方向)に付勢されている。
【0022】
図3及び図5に示すようにベース12の上面には一対のステイ30、30が取り付けられ、それらのステイ30の上端にはカム部材31がボルト32を利用して固定されている。カム部材31の外周側の端部は上側のホイール2とボルト33を介して連結されている。ホイール3の半径方向に沿ったカム部材31の両側縁部にはカム面35がローラ25と接触できるようにして設けられている。カムフォロアとしてのローラ25はコイルばね27の力によりカム面35に押し付けられる。各カム面35は基準線CLを挟んで対称である。カム面35には基準線CLと平行な平行部35aと、その平行部35aに対してホイール3の外周側に接続され、ホイール3の半径方向外側に向かうほどホイール3の周方向に関して互いに離れる方向に突出する拡大部35bとを備えている。
【0023】
以上のように構成されたチャック装置5においては、エアーシリンダ16によってスライダ15をホイール3の半径方向に駆動することによりローラ25をカム面35に沿って移動させてアーム21、21をチャック爪10とともに一体的に開閉させることができる。
【0024】
すなわち、ピストンロッド16aを格納した場合にはアーム21がホイール中心側に後退してローラ25がカム面35の平行部35aと接触してアーム21の先端部21aが互いに開かれる。このとき、チャック爪10はアーム21とともにホイール中心側に後退しかつ互いに開かれた待機位置(図1の実線で示す位置)に保持される。一方、ピストンロッド16aを伸ばした場合にはアーム21がホイール3の外周側に進んでローラ25がカム面35の拡大部35bに乗り上げる。これにより、左右のアーム21の後端部21bが押し広げられ、チャック爪10はホイール2、3の外側に突出しかつ互いに閉じられた掴み位置(図1に想像線で示す位置)に移動する。
【0025】
なお、エアーシリンダ16に対する圧縮空気の供給及び排出は、吸着カップやエアーシリンダを利用する公知のスターホイール装置と同様の空気圧回路を利用してホイール2、3の周方向に関する任意の位置で行うことができる。圧縮空気の供給及び排出のための構造は本発明の要旨ではないので詳細は省略する。
【0026】
以上の構成のチャック装置5においては、待機位置及び掴み位置のそれぞれにおけるチャック爪10の先端10bの位置、及び両位置間を移動する際のチャック爪10の動作は、カム面35の形状、エアーシリンダ16による駆動量、アーム21やチャック爪10の形状等の様々な要素を調整することによって変化させることができる。本実施形態ではチャック爪10が以下の通りに動作するようにカム面35の形状等を設定している。
【0027】
まず、図1に示すように、チャック爪10が待機位置にあるときには、その先端10bがホイール2、3の外周2b、3bよりもホイール中心側に位置決めされる。言い換えれば、チャック爪10の先端10bはホイール外周2b、3bよりも内側の領域Aに収容される。また、待機位置から掴み位置へチャック爪10が移動する際には、把持すべき壜BTの最大径部分をチャック爪10の先端10bが通過した後にチャック爪10が閉じるように一対のチャック爪10を動作させている。さらに、掴み位置から待機位置へチャック爪10が移動する際には、把持すべき壜BTがチャック爪10から開放されるまでチャック爪10が開いた後にチャック爪10の先端10bがホイール2、3の外周2b、3bの内側に後退するように一対のチャック爪10を動作させている。
【0028】
以上のスターホイール装置1によれば、待機位置においてチャック爪10の先端10bがホイール2、3内に位置決めされているので、壜BTの転倒等により壜詰まりや壜の破損が生じても、チャック爪10をホイール2、3によって保護してチャック爪10の損傷防止効果を高めることができる。
【0029】
本発明は以上の実施形態に限定されることなく、種々の形態で実施してよい。例えば駆動手段はエアーシリンダに限らず適宜に変更してよい。駆動手段はホイールに設けられていることを必須としない。例えば、ホイールの周囲の定位置に配置され、チャック装置が特定の回転位置又は範囲にあるときにチャック駆動機構と係わり合って駆動力を入力するように駆動手段を構成してもよい。駆動手段から伝達される運動をチャック爪の開閉運動に変換する機構はカム機構に限らず、リンク機構等の種々の運動変換機構を用いてよい。搬送対象の容器は壜に限らず、種々の容器を本発明の搬送装置にて搬送してよい。
【0030】
なお、直径が互いに異なる複数のホイールが設けられている場合、待機位置においてチャック爪の先端が最も径の大きいホイールよりも内側に収容されていれば本発明の技術的範囲に含まれる。
【0031】
【発明の効果】
以上説明したように、本発明によれば、容器を保持する必要がない待機位置においてチャック爪の先端がホイール外周よりもホイール中心側に後退しているので、ホイールを利用して壜詰まりや壜の破損からチャック爪を保護し、チャック爪の変形や破損を抑えることができる。従って、チャック爪の損傷防止効果が高まる。チャック爪の損傷を抑えることにより、搬送速度の高速化への対応も容易となる。
【図面の簡単な説明】
【図1】本発明の一実施形態に係るスターホイール装置におけるホイール内の構成を示す平面図。
【図2】ホイールの上面側からみたチャック装置の平面図。
【図3】チャック装置の側面図。
【図4】図1の要部の拡大図。
【図5】図4のV−V線に沿った断面図。
【符号の説明】
1 スターホイール装置(搬送装置)
2、3 ホイール
2a、3a ポケット
2b、3b ホイールの外周
5 チャック装置
10 チャック爪
10b チャック爪の先端
11 チャック駆動機構
15 スライダ(可動体)
16 エアーシリンダ(駆動手段)
20 アーム軸
21 アーム
21a アームの先端部
21b アームの後端部
23 チャック受け部
24 押え駒
25 ローラ(カムフォロア、カム機構)
27 コイルばね(付勢手段)
31 カム部材(カム機構)
35 カム面
35b カム面の拡大部
BT 壜(容器)
Claims (5)
- 容器を受け入れるポケットが設けられたホイールと、前記ホイールと一体回転可能に設けられたチャック装置とを備え、前記チャック装置には、前記容器を把持すべく開閉可能な一対のチャック爪と、前記一対のチャック爪を前記ホイールの中心側の待機位置と前記ホイールの外周側の掴み位置との間で進退させるとともに、前記待機位置では前記一対のチャック爪が開き、前記掴み位置では前記一対のチャック爪が閉じるように前記一対のチャック爪を開閉駆動するチャック駆動機構とが設けられ、前記待機位置においては前記チャック爪の先端が前記ホイールの外周よりも内側の領域に収容され、前記チャック駆動機構は、前記ホイール上にて半径方向に移動可能に支持された可動体と、前記可動体を前記ホイールの半径方向に駆動する駆動手段と、前記可動体に一対のアーム軸を介してそれぞれ回転自在に支持され、外周側の端部に前記チャック爪が設けられた一対のアームと、前記ホイールと前記アームとの間に配置されて前記駆動手段によって駆動される前記可動体の往復動作を前記一対のアームの前記アーム軸を中心とした回転運動に変換するカム機構とを備えていることを特徴とする容器の搬送装置。
- 前記カム機構は、前記ホイールの半径方向に沿ってカム面が形成されたカム部材と、前記アームに設けられて前記カム面と接するカムフォロアとを備えていることを特徴とする請求項1に記載の搬送装置。
- 前記ホイールの半径方向に沿った前記カム部材の両側縁部に前記カム面がそれぞれ設けられ、前記カムフォロアは前記アーム軸よりも前記ホイールの中心側に突出したアーム後端部に前記カム部材を挟み込むようにして設けられ、前記一対のアームの前記アーム後端部間にはこれらのアーム後端部を互いに引き寄せる付勢手段が設けられていることを特徴とする請求項2に記載の搬送装置。
- 前記カム面が前記半径方向の外側に向かうほど前記ホイールの周方向に関して互いに離れる方向に突出する拡大部を備えていることを特徴とする請求項3に記載の搬送装置。
- 前記チャック駆動機構は、前記待機位置から前記掴み位置へ前記一対のチャック爪が移動する際には把持すべき容器の最大径部分を前記チャック爪の先端が通過した後に前記チャック爪が閉じるように前記一対のチャック爪を動作させ、前記掴み位置から前記待機位置へ前記一対のチャック爪が移動する際には、把持すべき容器が前記チャック爪から開放された後に前記チャック爪の先端が前記ホイール内に収容されるように前記一対のチャック爪を動作させることを特徴とする請求項1〜4のいずれか1項に記載の搬送装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002382251A JP4239149B2 (ja) | 2002-12-27 | 2002-12-27 | 容器の搬送装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002382251A JP4239149B2 (ja) | 2002-12-27 | 2002-12-27 | 容器の搬送装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2004210478A JP2004210478A (ja) | 2004-07-29 |
| JP4239149B2 true JP4239149B2 (ja) | 2009-03-18 |
Family
ID=32817872
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2002382251A Expired - Fee Related JP4239149B2 (ja) | 2002-12-27 | 2002-12-27 | 容器の搬送装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4239149B2 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP4183725A1 (de) * | 2021-11-17 | 2023-05-24 | Krones AG | Vorrichtung und verfahren zum transportieren von behältnissen mit rollengestütztem stellmechanismus für greifklammern |
| EP3816077B1 (de) * | 2019-10-30 | 2024-09-18 | Tyrolon-Schulnig GmbH | Greifarm, greifvorrichtung sowie transportvorrichtung zum greifen, halten und führen von insbesondere flaschenartigen behältern |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN100528734C (zh) * | 2006-04-16 | 2009-08-19 | 温州惠利机械有限公司 | 自动液体灌装机的瓶推送装置 |
-
2002
- 2002-12-27 JP JP2002382251A patent/JP4239149B2/ja not_active Expired - Fee Related
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3816077B1 (de) * | 2019-10-30 | 2024-09-18 | Tyrolon-Schulnig GmbH | Greifarm, greifvorrichtung sowie transportvorrichtung zum greifen, halten und führen von insbesondere flaschenartigen behältern |
| EP4183725A1 (de) * | 2021-11-17 | 2023-05-24 | Krones AG | Vorrichtung und verfahren zum transportieren von behältnissen mit rollengestütztem stellmechanismus für greifklammern |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2004210478A (ja) | 2004-07-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2527724B2 (ja) | 単一グリッパ搬送装置の連結部材 | |
| JP2002020002A (ja) | ボビンを取扱う装置 | |
| EP2509769B1 (fr) | Machine et procédé de soufflage avec préchargement des préformes | |
| JP4239149B2 (ja) | 容器の搬送装置 | |
| JP5315731B2 (ja) | キャッパに備えられたグリッパ | |
| RU2260554C2 (ru) | Устройство для отвода и/или дальнейшей транспортировки гибких плоских изделий | |
| CN111703183B (zh) | 一种撕膜装置 | |
| JP4452796B2 (ja) | 容器の搬送装置 | |
| CN204713549U (zh) | 一种湿巾包装装置 | |
| US6386816B1 (en) | Printed matter transport device | |
| JPS6274654A (ja) | 輪転機の刷版自動着脱装置 | |
| EP1775126B1 (fr) | Dispositif de transfert d'un objet pour machine d'impression, machine d'impression et procédé de transfert | |
| JP2011073777A (ja) | 袋詰め包装機における袋放出補助装置 | |
| JP4585105B2 (ja) | ドラム缶のクランプ装置 | |
| JP4106249B2 (ja) | シート加工機械においてシート形の材料を裏返す装置 | |
| JP2005029225A (ja) | ボトルグリップ装置 | |
| CN113165814B (zh) | 用于热塑性材料的容器的传送星形轮 | |
| JP4734535B2 (ja) | 容器のチャック装置 | |
| JP5273848B2 (ja) | ベールグリッパ | |
| JP2001233448A (ja) | 容器搬送システム | |
| JPH0643067Y2 (ja) | クランプ式容器搬送装置のリジェクト装置 | |
| CN214559815U (zh) | 一种钢管抛光机 | |
| JP4306869B2 (ja) | ラベル拡開機構 | |
| EP1081078A2 (en) | Printed matter transport device | |
| US20080283363A1 (en) | Apparatus and Method for Feeding Pouches and Spouts for Processing |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20050707 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20080623 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20080701 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20080826 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20081118 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20081211 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120109 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |