《第1の実施の形態》
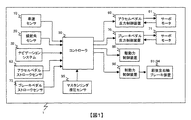
本発明の第1の実施の形態による車両用運転操作補助装置について、図面を用いて説明する。図1は、本発明の第1の実施の形態による車両用運転操作補助装置1の構成を示すシステム図であり、図2は、車両用運転操作補助装置1を搭載した車両の構成図である。なお、第1の実施の形態においては、自動変速機およびコンベンショナルディファレンシャルを備えた後輪駆動車に車両用運転操作補助装置1を搭載する場合を例として説明する。
まず、車両用運転操作補助装置1の構成を説明する。車両用運転操作補助装置1は、車速センサ10と、操舵角センサ20と、ナビゲーションシステム30と、アクセルペダル62に発生する操作反力を制御するアクセルペダル反力制御装置60と、ブレーキペダル72に発生する操作反力を制御するブレーキペダル反力制御装置70と、自車両に発生する駆動力を制御する駆動力制御装置80と、自車両に発生する制動力を制御する制動力制御装置90と、車両用運転操作補助装置1の全体の制御を行うコントローラ50等を備えている。
車速センサ10は、車輪の回転数や変速機の出力側の回転数を計測することにより自車両の車速を検出し、検出した自車速をコントローラ50に出力する。操舵角センサ20は、ステアリングコラムもしくはステアリングホイール21付近に取り付けられた角度センサ等であり、ステアリングシャフトの回転を操舵角として検出し、コントローラ50へ出力する。
ナビゲーションシステム30は、経路探索や経路案内を行う装置であり、車両の位置情報(X0,Y0)を検出するためのGPS(Global Positioning System)と、地図情報を記憶した記憶媒体とを備えている。記憶媒体は、自車両が走行している前方の走行路の情報、走行路の形状情報(例えばカーブ路の半径)、走行路の勾配等の地形情報、交差点やトンネル等の環境情報、さらに走行路上に設定されたノード点の座標を示すノード点情報を保持している。ここで、ノード点は、車両が走行し得る走行経路を点として示すものである。すなわち、ノード点の並んだノード列は、車両が走行する直線または曲線の走行経路を示すものになる。
ナビゲーションシステム30は、GPSで検出した自車両の位置情報(X0,Y0)に基づいて記憶媒体に記憶されている地図情報を参照し、車両前方の道路上にあるノード点までの距離Ln,およびそのノード点の絶対座標(Xn,Yjnからなるノード情報(Xn,Yn,Ln)を算出するように構成されている。ナビゲーションシステム30は、このように算出したノード点(複数ある場合には複数のノード点)のノード点情報を、コントローラ50に出力する。
コントローラ50は、CPUと、ROMおよびRAM等のCPU周辺部品とから構成されており、車両用運転操作補助装置1全体の制御を行う。コントローラ50は、車速センサ10および操舵角センサ20から、自車速および操舵角といった車両状態を読み込む。また、ナビゲーションシステム30から自車両前方の走行路のノード点情報を読み込み、自車両が走行する道路の道路形状を認識する。
そして、コントローラ50は、車両状態および道路形状に関する情報に基づいて、自車両が走行する際のリスクを算出する。具体的には、自車両がカーブに進入する際およびカーブを走行する際の超過車速に関するリスク(以降、コーナースピード超過リスクと呼ぶ)を算出する。そして、コーナースピード超過リスクに基づいて、アクセルペダル62に発生する操作反力およびブレーキペダル72に発生する操作反力をそれぞれ制御する。さらに、コーナースピード超過リスクに基づいて、自車両がカーブを走行する際にオーバースピードとならないように自車両の制駆動力を制御する。
そこで、コントローラ50は、コーナースピード超過リスクに基づく操作反力の指令値をアクセルペダル反力制御装置60およびブレーキペダル反力制御装置70にそれぞれ出力するとともに、コーナースピード超過リスクに基づく制駆動力の指令値を、駆動力制御装置80および制動力制御装置90にそれぞれ出力する。これらの制御の詳細は後述する。
アクセルペダル反力制御装置60は、コントローラ50から入力される反力指令値に応じて、アクセルペダル62のリンク機構に組み込まれたサーボモータ61で発生させるトルクを制御する。サーボモータ61は、アクセルペダル操作反力制御装置60からの指令値に応じて発生させる反力を制御し、運転者がアクセルペダル62を操作する際に発生する踏力を任意に制御することができる。なお、コーナースピード超過リスクに応じたアクセルペダル反力制御を行っていない場合の反力特性(通常反力特性)は、例えばアクセルペダル62の操作量の増加に比例してペダル反力が増加するように設定されている。この通常反力特性は、例えばアクセルペダル62の回動中心に設けられたねじりばね(不図示)のバネ力によって実現することができる。
アクセルペダル62には、アクセルペダル62の踏み込み量(操作量)を検出するアクセルペダルストロークセンサ63が設けられている。アクセルペダルストロークセンサ63によって検出されたアクセルペダル操作量はコントローラ50に出力される。
ブレーキペダル反力制御装置70は、コントローラ50から入力される反力指令値に応じて、ブレーキペダル72のリンク機構に組み込まれたサーボモータ71で発生させるトルクを制御する。サーボモータ71は、ブレーキペダル反力制御装置70からの指令値に応じて発生させる反力を制御し、運転者がブレーキペダル72を操作する際に発生する踏力を任意に制御することができる。なお、コーナースピード超過リスクに応じたブレーキペダル反力制御を行っていない場合の反力特性(通常反力特性)は、例えばブレーキペダル72の操作量の増加に比例してペダル反力が増加するように設定されている。なお、ここでは、サーボモータ71によってブレーキペダルの反力を制御しているが、これには限定されず、例えばコンピュータ制御による油圧力を用いてブレーキアシスト力を発生させることもできる。
ブレーキペダルストロークセンサ73は、リンク機構を介してサーボモータ71の回転角に変換されたブレーキペダル72の操作量を検出する。ブレーキペダルストロークセンサ73は、検出したブレーキペダル操作量をコントローラ50に出力する。
駆動力制御装置80は、コントローラ50からの指令に応じて、例えばスロットルバルブ(不図示)のスロットル開度を制御することにより、エンジンの運転状態を制御して自車両に発生する駆動力を制御する。なお、駆動力制御装置80は、自動変速機(不図示)の選択変速比を制御したり、エンジンへの燃料噴射量や点火時期を制御することによって駆動力を制御することも可能である。
制動力制御装置90は、コントローラ50からの指令に応じて、前後左右の各車輪に与える制動力(制動液圧)を個々に制御することができる。制動力制御装置90は、車両の左前輪に設けられたブレーキ装置91、右前輪に設けられたブレーキ装置92、左後輪に設けられたブレーキ装置93、および右後輪に設けられたブレーキ装置94をそれぞれ制御する。ここで、左右前後輪ブレーキ装置91〜94は、それぞれブレーキディスクと、液圧の供給によりブレーキディスクを摩擦挟持して車輪にブレーキ力(制動力)与えるホイールシリンダとを備えている。制動力制御装置90は、各ブレーキ装置91〜94のホイールシリンダにそれぞれ液圧を供給することにより、各車輪を個々に制動する。
制動力制御装置90は、前後左右の各液圧供給系(各チャンネル)それぞれに対応するアクチュエータを備えている。アクチュエータとしては、例えば各ホイルシリンダ液圧を任意の制動液圧に制御可能なように比例ソレノイド弁を使用する。なお、制動力制御装置90は、コントローラ50からの指令に応じてブレーキペダル72の操作によるマスタシリンダからの油圧を調節し、各輪のホイルシリンダへ供給する制動液圧を制御する。
マスタシリンダ液圧センサ95は、運転者のブレーキ操作に応じたマスタシリンダの液圧Pmを検出し、検出結果をコントローラ50に入力する。
つぎに、第1の実施の形態による車両用運転操作補助装置1の動作を、図3のフローチャートを用いて説明する。図3は、第1の実施の形態のコントローラ50における運転操作補助制御処理の処理手順のフローチャートを示す。本処理内容は、一定間隔、例えば50msec毎に連続的に行われる。
ステップS100では、車速センサ10、操舵角センサ20、アクセルペダルストロークセンサ62およびマスタシリンダ液圧センサ95による検出信号を入力し、自車両の走行状態データを読み込む。ここで、走行状態データは、自車速V、操舵角θ、アクセルペダル操作量S,およびマスタシリンダ液圧Pm等である。さらに、ナビゲーションシステム30から自車両の位置情報(X0,Y0)および自車両前方の各ノード点のノード点情報(Xn、Yn,Ln)を読み込む。
ステップS110では、ステップS100で読み込んだ走行状態データから、自車両が走行する前方の道路状況を認識する。具体的には、ステップS100で取得したノード点情報(Xn,Yn,Ln)に基づいて、各ノード点における道路の曲率半径Rnを算出する。以下に、曲率半径Rnの算出方法を説明する。
まず、自車位置からn−1番目にあるノード点のノード点情報を(Xn-1、Yn-1,Ln-1)、n番目にあるノード点のノード点情報を(Xn、Yn,Ln)、n+1番目にあるノード点のノード点情報を(Xn+1、Yn+1,Ln+1)とする。そして、以下の(式1)に従って変数xa、ya、xb、ybを算出する。
xa=K・(Xn−Xn-1)
ya=K・(Yn−Yn-1)
xb=K・(Xn+1−Xn-1)
yb=K・(Yn+1−Yn-1) ・・・(式1)
ただし、K0=(Xn−Xn-1)2+(Yn−Yn-1)2
K=(Ln−Ln-1)/(Ko)1/2
ついで、(式1)で算出された変数xa,ya、xb、ybに基づいて、以下の(式2)にしたがって変数XR,YR,Rr、Aを算出する。
XR=(Ca・yb−Cb・ya)/A
YR=(Ca・xa−Cb・xb)/A
Rr=XR2+YR2 ・・・(式2)
ただし、Ca=(xa2+ya2)/2
Cb=(xb2+yb2)/2
A=xb・yb−xb・ya
そして、上記(式2)で算出された変数Aが0.01より小さい場合、または変数Rrが4000000mよりも大きい場合には、自車位置からn番目にあるノード点において道路の曲率半径Rnが2000mであると算出する。それ以外の場合は、以下の(式3)にしたがって、当該曲率半径Rnを算出する。なお、道路の曲率Rnは左旋回時に負値となる。
Rn=A/|A|・(Rr)1/2 ・・・(式3)
なお、ここでは3つのノード点情報から道路の曲率半径Rnを算出する方法を示したが、算出方法はこれには限定されない。例えば曲率半径Rnを算出しようとする地点に対して、前後にあるノード点を結ぶ直線を算出し、その直線の傾きに基づいて曲率半径Rnを算出することもできる。また、ノード点の座標等をナビゲーションシステム30から読み込み、読み込んだ情報に基づいて曲率半径Rnを算出する方法を示したが、ナビゲーションシステム30にノード点情報として曲率半径Rnを予め記憶させておくこともできる。
ステップS120では、ステップS100でノード点情報を読み込んだ複数のノード点の中から、制駆動力制御および操作反力制御の対象とする制御対象点(目標ノード点)を算出する。図4に、ナビゲーションシステム30から得られるノード点の一例を示し、図5に、図4に示すノード点に対応する曲率半径Rnを示す。また、図6に、図4に示すようなカーブを通過する際の操舵角θの変化の一例を示す。ここでは、図5に示すように、自車両前方にあるノード点のうちから、ステップS110で算出した曲率半径Rnが極小となるノード点であって、自車位置から最も近くにある点を目標ノード点として選択する。
さらに、選択した目標ノード点よりも先、すなわち自車位置から遠くにあるノード点の中から曲率半径Rnが最小となる点がある場合は、その点も目標ノード点として選択する。ここでは、自車両の直近にある目標ノード点を制御対象点1、制御対象点1よりも自車位置から遠方にある目標ノード点を制御対象点2とする。なお、制御対象点1は、図4に示すようなカーブにおいてカーブ入り口のノード点に対応し、制御対象点2は、カーブにおいて最小の曲率半径Rnのノード点に対応している。
ステップS130では、ステップS120で算出した制御対象点を走行する際の目標車速V0を算出する。具体的には、制御対象点1,2の曲率半径Rn_1、Rn_2と、予め設定した許容横加速度Yglimitを用いて、以下の(式4)から制御対象点1における目標車速V0_1、および制御対象点2における目標車速V0_2をそれぞれ算出する。
V0_1=(Yglimit・|Rn_1|)0.5
V0_2=(Yglimit・|Rn_2|)0.5 ・・・(式4)
許容横加速度Yglimitは、例えば0.3Gとする。
つづくステップS140では、制御対象点における目標減速度Xgsを算出する。目標減速度Xgsは、自車両が目標車速V0でカーブを逸脱することなく走行するために必要な減速度である。具体的には、ステップS100で読み込んだ現在の自車速V、制御対象点1,2までの車間距離Ln_1、Ln_2、および目標車速V0_1,V0_2に基づいて、以下の(式5)から目標減速度Xgs_1、Xgs_2を算出する。
Xgs_1=(V2−V0_12)/(2・Ln_1)
=(V2−Yglimit・|Rn_1|)/(2・Ln_1)
Xgs_2=(V2−V0_22)/(2・Ln_2)
=(V2−Yglimit・|Rn_2|)/(2・Ln_2) ・・・(式5)
なお、目標減速度Xgsは、減速時に正値となる。
図7に、コーナーに対する自車位置と、必要減速度Xgsとの関係を示す。図7に示すように、自車位置が制御対象点に接近するにつれて、必要減速度Xgsが大きくなる。ここでは、制御対象点2の曲率半径Rn_2の方が制御対象点1の曲率半径Rn_1よりも小さいので、制御対象点2に対する必要減速度Xgs_2の方が相対的に大きく算出される。
ステップS150では、操作反力制御の開始判断を行う。なお、操作反力制御は、後述するコーナースピード超過リスクRcvに基づいて行う。ここでは、ステップS140で算出した目標減速度Xgsに基づいて以下のように操作反力制御開始判断を行う。まず、前回周期において設定された操作反力制御フラグflg_rfが0のリセット状態である場合、ステップS140で算出した自車両の現在位置に対応する目標減速度Xgsが所定の閾値Xgs_warn以上であるときに、操作反力制御フラグflg_rfを1のセット状態にする。
また、前回周期において設定された操作反力制御フラグflg_rfが1のセット状態である場合、自車両の現在位置に対応する目標減速度Xgsが所定値(Xgs_warn−Khwarn)以上であるときに、操作反力制御フラグflg_rfを1のセット状態にする。ここで、Khwarnは、操作反力制御開始/解除のハンチングを防ぐための定数であり、例えば0.03Gに設定する。
一方、自車両の現在位置に対応する目標減速度Xgsが所定値(Xgs_warn−Khwarn)より小さい場合等、上記条件を満たさない場合は、操作反力制御フラグflg_rfを0のリセット状態にする。なお、操作反力制御開始判断は、制御対象点1および制御対象点2に対して算出された目標減速度Xgs_1,Xgs_2の両方について行う。
つづくステップS160では、ステップS140で算出した目標減速度Xgsに基づいて以下のように制駆動力制御開始判断を行う。まず、前回周期において設定された制駆動力制御フラグflg_decが0のリセット状態である場合、ステップS140で算出した自車両の現在位置に対応する目標減速度Xgsが所定の閾値Xgs_start以上であるときに、制駆動力制御フラグflg_decを1のセット状態にする。
また、前回周期において設定された制駆動力制御フラグflg_decが1のセット状態である場合、自車両の現在位置に対応する目標減速度Xgsが所定値(Xgs_start−Kh)以上であるときに、制駆動力制御フラグflg_decを1のセット状態にする。ここで、Khは、制駆動力制御開始/解除のハンチングを防ぐための定数であり、予め適切な値を設定しておく。
一方、自車両の現在位置に対応する目標減速度Xgsが所定値(Xgs_start−Kh)より小さい場合等、上記条件を満たさない場合は、制駆動力制御フラグflg_decを0のリセット状態にする。なお、制駆動力制御開始判断は、制御対象点1および制御対象点2に対して算出された目標減速度Xgs_1,Xgs_2の両方について行う。また、ステップS150およびS160の判断に用いた閾値Xgs_warn、Xgs_startは、固定値に限られるものではない。例えばヘッドライトの作動状態等に基づいて車両周辺の明るさを判断するようにして、車両周辺が暗く、運転者がスピード感を大きく感じるときは、明るさに応じて変わる変動値を用いることも可能である。
ステップS170では、ステップS140で算出した目標減速度Xgsを補正する。ここでは、例えばステップS160の制駆動力制御開始判断に用いた閾値Xgs_startを用いて目標減速度Xgsを制限する。制限補正した目標減速度Xgsを、目標減速度補正値Xgs_hとする。なお、目標減速度Xgsが閾値Xgs_startを超えない場合は、目標減速度Xgsをそのまま目標減速度補正値Xgs_hとして設定する。
ステップS180では、ステップS140で算出した目標減速度Xgsから、自車両がカーブを走行する際のリスク、すなわちコーナースピード超過リスクRcvを算出する。図8に、目標減速度Xgsとコーナースピード超過リスクRcvとの関係を示す。図8に示すように、目標減速度Xgsが大きくなるほどコーナースピード超過リスクRcvは大きくなる。なお、目標減速度Xgsおよびコーナースピード超過リスクRcvは、ともに自車両が車速超過により前方のコーナーから逸脱するリスクを表すものであり、目標減速度Xgsをそのままコーナースピード超過リスクRcvとして用いることも可能である。
ステップS190では、前後左右輪のブレーキ装置91〜94のホイールシリンダにそれぞれ供給する目標制動液圧を算出する。まず、ステップS160で設定した制駆動力制御フラグflg_decが1のセット状態であるか否かを判定する。flg_dec=1の場合には制駆動力制御を実行するため、ステップS170で算出した目標減速度補正値Xgs_hに、ブレーキ諸元等から定まる定数Kbを乗じて目標制動液圧Pcを算出する。そして、目標制動液圧Pcと、運転者の制動操作によるマスタシリンダ圧Pmのうち、大きいほうを前輪用目標制動液圧Psfとして設定する。さらに、前輪用目標制動液圧Psfに基づいて、最適な前後制動力配分となるように後輪用目標制動液圧Psrを算出する。
なお、自車両が制御対象点を通過した後は、制駆動力制御を突然終了して運転者に違和感を与えないように、目標制動液圧Pc、すなわち自車両に発生させる制駆動力制御量を徐々に0まで低下させる。この場合、例えばリミット値を適切に設定した変化量リミッタを用いる。
一方、制駆動力制御フラグflg_decが0のリセット状態である場合には、制駆動力制御を実行しない。したがって、運転者の制動操作によるマスタシリンダ圧Pmを前輪用目標制動液圧Psfとして設定するとともに、前輪用目標制動液圧Psfに基づいて、最適な前後制動力配分となるように後輪用目標制動液圧Psrを算出する。
つづくステップS200では、自車両に発生する駆動力を算出する。具体的には、制駆動力制御フラグflg_decが1のセット状態である場合には、ステップS100で読み込んだアクセルペダル操作量Sに応じて目標駆動トルクf(S)を算出する。そして、目標駆動トルクf(S)から、ステップS190で算出した目標制動液圧Pcによって発生が予測される制動トルクg(Pc)を差し引いて、目標駆動トルクTrqdsを算出する。
一方、制駆動力制御フラグflg_decが0のリセット状態である場合には、アクセルペダル操作量Sに応じて算出される目標駆動トルクf(S)をそのまま目標駆動トルクTrgdsとして設定する。
ステップS210では、ステップS180で算出したコーナースピード超過リスクRcvに基づいて、アクセルペダル反力およびブレーキペダル反力の制御量をそれぞれ算出する。まず、ステップS150で設定した操作反力制御フラグflg_rfが1のセット状態であるか否かを判定する。flg_rf=1の場合には操作反力制御を実行するため、ステップS180で算出したコーナースピード超過リスクRcvを用いて、以下の(式6)から反力制御量ΔFを算出する。
ΔF=K_rf・Rcv ・・・(式6)
ここで、K_rfは、コーナースピード超過リスクRcvを反力制御量ΔFとして運転者に伝えるように変換する際のゲインであり、予め適切な値を設定しておく。一方、ステップS150で設定した操作反力制御フラグflg_rfが0のリセット状態である場合は、操作反力制御を行わないため、反力制御量ΔFを0にする。また、自車両が制御対象点を通過した後は、操作反力制御を突然終了して運転者に違和感を与えないように、反力制御量ΔFを徐々に0まで低下させる。この場合、例えば予め設定したリミット値による変化量リミッタを用いる。
ステップS220では、ステップS210で算出した反力制御量ΔFを補正する。具体的には、目標減速度Xgsが閾値Xgs_startを超えると、反力制御量ΔFを閾値Xgs_startに対応する値に制限する。さらに、自車両が制御対象点1を通過した後に、制御対象点2に対する操作反力制御および制駆動力制御が開始される場合は、制御対象点1を通過してからの反力制御量ΔFの低下率を小さくする。図9に、コーナーに対する自車位置と、必要減速度Xgsおよび反力制御量ΔFとの関係を示す。
図9に示すように、制御対象点1を通過した後に反力制御量ΔFを補正しない場合、反力制御量ΔFは所定のリミット値で徐々に低下し、制御対象点2に対する目標減速度Xgsの増加に伴って再び増加し始める。したがって、自車両がカーブを走行する際に操作反力が変動し、運転者に違和感を与える可能性がある。そこで、制御対象点1を通過した後に制御対象点2に対する操作反力制御および制駆動力制御が開始される場合は、変化量リミッタのリミット値を小さくする。これにより、図10に示すように制御対象点1を通過した後の反力制御量ΔFの低下が抑制され、制御対象点2に対する操作反力制御に、スムーズに移行することができる。なお、変化量リミッタのリミット値を小さく補正する場合に、リミット値を0に設定ことももちろん可能である。
ステップS230では、ステップS190で算出した目標制動液圧Psf,Psrを制動力制御装置90に出力し、ステップS200で算出した目標駆動トルクTrqdsを駆動力制御装置80に出力する。制動力制御装置90は、コントローラ50から入力される液圧指令値に応じて前後左右輪のブレーキ装置91〜94のホイールシリンダにそれぞれ液圧を供給し、各車輪を個々に制動する。また、駆動力制御装置80は、スロットルバルブの開度等を調整し、自車両に発生する駆動力を制御する。
ステップS240では、ステップS210またはステップS220で設定した反力制御量ΔFを、それぞれアクセルペダル反力制御装置60およびブレーキペダル反力制御装置70に出力する。アクセルペダル反力制御装置60は、コントローラ50からの指令に応じて、アクセルペダル操作量Sに応じた通常反力特性に反力制御量ΔFを加算した値をアクセルペダル反力として発生するようにサーボモータ61を制御する。
また、ブレーキペダル反力制御装置70は、コントローラ50からの指令に応じて、ブレーキペダル操作量に応じた通常反力特性から反力制御量ΔFを減算した値をブレーキペダル反力として発生するように、サーボモータ71を制御する。すなわち、反力制御量ΔFはブレーキアシスト力に相当し、反力制御量ΔFが付加されることにより運転者はブレーキペダル72を踏み込みやすくなる。これにより、今回の処理を終了する。
以下に、図10および図11を用いて第1の実施の形態による車両用運転操作補助装置1の作用を説明する。なお、図11は図10に対応する制駆動力制御量の変化を示している。
図11に示すように、制駆動力制御量は、制御対象点1に対する目標減速度Xgsが制駆動力制御開始の閾値Xgs_startを超えると増加し始め、閾値Xgs_startに対応する値で固定される。自車両が制御対象点1を通過すると、制駆動力制御量は変化量リミッタにより徐々に0まで低下する。その後、制御対象点2に対する目標減速度Xgsが閾値Xgs_startを超えると、再び制駆動力制御量は増加し始め、自車両が制御対象点2を通過した後に徐々に0まで低下する。
一方、図10に示すように、制御対象点1に対する目標減速度Xgsが操作反力制御開始の閾値Xgs_warnを超えると、反力制御量ΔFが増加し始める。目標減速度Xgsが制駆動力制御開始の閾値Xgs_startを超えると、反力制御量ΔFは制駆動力制御開始の閾値Xgs_startによって制限された目標減速度補正値Xgs_hに対応する値に固定される。自車両が制御対象点1を通過すると反力制御量ΔFは変化量リミッタにより徐々に低下するが、その後開始される制御対象点2に対する操作反力制御に備えて低下量は抑制される。その後、制御対象点2に対する目標減速度Xgsが増加すると反力制御量ΔFは再び増加し、目標減速度補正値Xgs_hに対応する値に固定される。自車両が制御対象点2を通過すると、反力制御量ΔFは変化量リミッタにより徐々に0まで低下する。
このように、自車両がカーブに進入していくときに、カーブ入り口(制御対象点1)を車速超過することなく通過するために必要な減速度Xgs_1に応じて操作反力制御および制駆動力制御が行われ、さらに、カーブにおける曲率半径Rnが最小の地点(制御対象点2)に対する必要減速度Xgs_2に応じた操作反力制御および制駆動力制御が行われる。これにより、カーブを走行する際にカーブから逸脱するような超過車速にならないように自車両を減速させることができる。また、制駆動力制御よりも早いタイミングで操作反力制御が行われるので、制駆動力制御が開始される前からカーブ走行に関するリスクを操作反力として運転者に知らせることができる。
制御対象点1を通過した後は制駆動力制御量が徐々に低下して自車両に発生する制動力が低下するが、反力制御量ΔFの低下は抑制される。これにより、制御対象点1を通過してから自車両が不所望に加速してしまうことを抑制し、制御対象点2に対する操作反力制御および制駆動力制御へとスムーズに移行することができる。
このように、以上説明した第1の実施の形態においては、以下のような作用効果を奏することができる。
(1)コントローラ50は、自車両の前方の道路形状を検出し、車両状態および道路形状に基づいて、自車両が前方の道路から逸脱するリスク(目標減速度Xgsもしくはコーナースピード超過リスク)を算出する。そして、算出したリスクに基づいて自車両に発生する制駆動力を制御するとともに、リスクに基づいてアクセルペダル62およびブレーキペダル72等の運転操作装置に発生する操作反力を制御する。これにより、自車両が前方の道路から逸脱しないように自車両を減速させるとともに、逸脱するリスクを、操作反力として運転者に伝達することができる。さらに、制駆動力制御および操作反力制御がともに行われる領域において、制駆動力制御および/または操作反力制御の作動状態が変化する際に制駆動力制御と操作反力制御が連動してスムーズに作動するようにそれぞれの制御を調整する。すなわち、制駆動力制御と操作反力制御によって運転者が受ける減速感がスムーズに変化するように各制御を調整する。これにより、制駆動力制御と操作反力制御とがともに行われる状態で、制駆動力および操作反力が不所望に変動して運転者に違和感やわずらわしさを与えることを抑制できる。
(2)コントローラ50は、制駆動力制御および操作反力制御が終了するときに、操作反力制御による操作反力(反力制御量ΔF)の低下速度を、制駆動力制御による制御量(目標制動液圧Pc)の低下速度よりも遅くする。これにより、図10および図11に示すように、自車両が制御対象点1を通過すると制駆動力制御量は速やかに減少するのに対し、反力制御量ΔFの低下速度は抑制される。その結果、とくに自車両がコーナーに進入してからコーナー内の最小曲率半径の地点に接近するときに、操作反力が大きく変動して運転者に違和感を与えることを抑制できる。さらに、反力制御量ΔFの低下が抑制されても制駆動力制御量は速やかに低下するので、自車両がコーナーに進入してから不所望に大きな減速感を運転者に与えることがない。このように、反力制御量ΔFの低下速度と制駆動力制御量の低下速度とが異なるように設定することにより、制御対象点1に対する制御から、制御対象点2に対する制御へと滑らかに移行することができる。
(3)コントローラ50は、車両状態、例えば自車速Vと、自車両前方の道路の曲率半径Rnとに基づいて、自車両が前方のカーブから逸脱するリスクを算出する。具体的には、曲率半径Rnと所定の許容横加速度Yglimitから自車両がカーブを走行する際の目標車速V0を算出し、目標車速V0と現在の自車速Vとから自車両がコーナーを逸脱することなく走行するときに必要となる目標減速度Xgsを算出する。目標減速度Xgsまたは目標減速度Xgsから算出されるコーナースピード超過リスクRcvを、カーブからの逸脱リスクとする。これにより、自車両が前方のカーブに進入し、通過するときに、自車両がカーブから逸脱しないような減速制御を行うとともに、カーブからの逸脱の可能性を操作反力として運転者に知らせることができる。
なお、上述した第1の実施の形態では自車両が制御対象点1を通過した後に反力制御量ΔFの低下速度を遅くしたが、制御対象点2の通過後も同様に反力制御量ΔFの低下を遅くすることもできる。
《第2の実施の形態》
本発明の第2の実施の形態による車両用運転操作補助装置について、図面を用いて説明する。第2の実施の形態による車両用運転操作補助装置の構成は、図1および図2に示した第1の実施の形態と同様である。ここでは、第1の実施の形態との相違点を主に説明する。
上述した第1の実施の形態では、制御対象点を車速超過することなく通過するために必要な目標減速度Xgsを、操作反力制御および制駆動力制御について同一の値に設定した。第2の実施の形態では、操作反力制御における目標減速度Xgs_rfと、制駆動力制御における目標減速度Xgs_decをそれぞれ異なる値として設定する。
以下に、第2の実施の形態による車両用運転操作補助装置の動作を、図12のフローチャートを用いて説明する。図12は、第2の実施の形態のコントローラ50における運転操作補助制御処理の処理手順のフローチャートを示す。本処理内容は、一定間隔、例えば50msec毎に連続的に行われる。ステップS300〜S320における処理は、図3に示したフローチャートのステップS100〜S120における処理と同様であるので説明を省略する。
ステップS330では、制御対象点1および制御対象点2を走行する際の目標車速V0を、操作反力制御および制駆動力制御についてそれぞれ算出する。制駆動力制御については、上述した第1の実施の形態と同様に予め設定した許容横加速度Yglimitを用い、操作反力制御については、Yglimitよりも小さい所定の許容横加速度Yglimit_rfを用いる。制駆動力制御に関する目標車速V0_decおよび操作反力制御に関する目標車速V0_rfは、それぞれ以下の(式7)から算出する。なお、以下の(式7)において添え字nは、制御対象点1、2を表す。
V0_dec_n=(Yglimit・|Rn_n|)0.5
V0_rf_n=(Yglimit_rf・|Rn_n|)0.5 ・・・(式7)
つづくステップS340では、制御対象点における目標減速度Xgsを算出する。ここでは、ステップS330で算出した目標車速V0_decおよびV0_rfを用いて、制駆動力制御を行う際の目標減速度Xgs_decおよび操作反力制御を行う際の目標減速度Xgs_rfを、以下の(式8)からそれぞれ算出する。以下の(式8)において添え字nは、制御対象点1,2を表す。
Xgs_dec_n=(V2−V0_dec_n2)/(2・Ln_n)
=(V2−Yglimit・|Rn_n|)/(2・Ln_n)
Xgs_rf_n=(V2−V0_rf_n2)/(2・Ln_n)
=(V2−Yglimit_rf・|Rn_n|)/(2・Ln_n) ・・・(式8)
なお、目標減速度Xgsは、減速時に正値となる。
図13に、コーナーに対する自車位置と、目標減速度Xgs_dec,Xgs_rfとの関係を示す。ここでは、説明を簡単にするために制御対象点1に対する目標減速度Xgs_dec,Xgs_rfのみを示している。目標減速度Xgs_dec,Xgs_rfは、自車両が制御対象点1に接近するにつれて大きくなる。ただし、操作反力制御についての許容横加速度Yglimit_rfが制駆動力制御についての許容横加速度Yglimitよりも小さいので(Yglimit_rf<Yglimit)、図13に示すように操作反力制御における目標減速度Xgs_rfが相対的に大きく設定される。
つづくステップS350では、上述した図3のステップS150と同様に、所定の閾値Xgs_warnを用いて操作反力制御開始の判断を行う。ステップS360では、上述した図3のステップS160と同様に、所定の閾値Xgs_startを用いて制駆動力制御開始の判断を行う。
ステップS370では、ステップS340で算出した目標減速度Xgsを補正する。ここでは、制駆動力制御における目標減速度Xgs_decを、所定値(例えばXgs_start)によって制限し、補正した値を目標減速度補正値Xgs_dec_hとする。
つづくステップS380ではステップS340で算出した操作反力制御における目標減速度Xgs_rfに基づいてコーナースピード超過リスクRcvを算出する。具体的には、上述した図8と同様のマップを用いて目標減速度Xgs_rfに応じたコーナースピード超過リスクRcvを算出する。
ステップS390では、ステップS370で算出した目標減速度補正値Xgs_dec_hに基づいて、前後左右輪のブレーキ装置91〜94のホイールシリンダにそれぞれ供給する目標制動液圧を算出する。ステップS400では、自車両に発生する駆動力を算出する。
ステップS410では、ステップS380で算出したコーナースピード超過リスクRcvに基づいて、反力制御量ΔFを算出する。反力制御量ΔFは、上述した(式6)から算出することができる。つづくステップS420では、ステップS410で算出した反力制御量ΔFを補正する。具体的には、図14(a)に示すように、制駆動力制御における目標減速度Xgs_decが制駆動力制御開始判断の閾値Xgs_startを超えると、反力制御量ΔFを閾値Xgs_startに対応する値に制限する。また、自車両が制御対象点1を通過すると、所定のリミット値による変化量リミッタにより反力制御量ΔFを徐々に低下させる。
さらに、制駆動力制御における目標減速度Xgs_decが閾値Xgs_startを超えてから反力制御量ΔFを閾値Xgs_startに対応する値に制限する際に、反力制御量ΔFに徐々に低下する。これにより、図14(a)に示すように制駆動力制御の目標減速度Xgs_decが閾値Xgs_startに達する位置で反力制御量ΔFがピークとなり、その後閾値Xgs_startに対応する値まで徐々に低下する。
ステップS430では、ステップS390およびS400で算出した駆動信号を制動力制御装置90および駆動力制御装置80にそれぞれ出力する。ステップS440では、ステップS420で補正した反力制御量ΔFをアクセルペダル反力制御装置60およびブレーキペダル反力制御装置70にそれぞれ出力する。これにより、今回の処理を終了する。
以下に、図14(a)(b)および図15を用いて第2の実施の形態による車両用運転操作補助装置1の作用を説明する。図14(b)は図14(a)に対応する制駆動力制御量の変化を示している。なお、図14(a)(b)においては、説明を簡単にするため制御対象点1に対する反力制御量ΔFおよび制駆動力制御量の変化のみを示している。
図14(b)に示すように、制駆動力制御量は、制駆動力制御における目標減速度Xgs_decが閾値Xgs_startを超えると増加し始め、閾値Xgs_startに対応する値で固定される。自車両が制御対象点1を通過すると、制駆動力制御量は変化量リミッタにより徐々に低下する。
一方、図14(a)に示すように、操作反力制御における目標減速度Xgs_rfが閾値Xgs_warnを超えると、反力制御量ΔFが増加し始める。制駆動力制御における目標減速度Xgs_decが制駆動力制御開始の閾値Xgs_startを超えると、反力制御量ΔFは徐々に低下し、閾値Xgs_startに対応する値に固定される。自車両が制御対象点1を通過すると反力制御量ΔFは変化量リミッタにより徐々に低下する。
図15(a)(b)に、制御対象点1および制御対象点2に対する反力制御量ΔFおよび制駆動力制御量の変化を示す。制御対象点1に対する反力制御量ΔFおよび制駆動力制御量の変化は、図14(a)(b)と同様である。制御対象点1を通過した後、図15(a)に示すように反力制御量ΔFは徐々に低下する。その後、制御対象点2に対する目標減速度Xgs_rfの増加に伴って反力制御量ΔFが再び増加する。制駆動力制御量は、図15(b)に示すように制御対象点1および制御対象点2に対する目標減速度Xgs_decにしたがって変化する。
このように、制駆動力制御における目標減速度Xgs_decと、操作反力制御における目標減速度Xgs_rfをそれぞれ異なる値として設定することにより、自車両がカーブから逸脱しないように制駆動力制御および操作反力制御を効果的に行うことができる。
とくに、操作反力制御における目標減速度Xgs_rfを制駆動力制御における目標減速度Xgs_decよりも大きく設定することにより、目標減速度Xgs_decに基づいて反力制御量ΔFを算出する場合よりも大きな反力制御量ΔFが発生する。また、目標減速度Xgs_decと目標減速度Xgs_rfが異なる値として算出されるので、制駆動力制御が開始するときに目標減速度Xgs_decと目標減速度Xgs_rfに差をつけて、反力制御量ΔFにピークを持たせることができる。このように制駆動力制御における目標減速度Xgs_decおよび操作反力制御における目標減速度Xgs_rfをそれぞれ適切に設定することにより、カーブの走行に関するリスクを運転者により確実に知らせることができる。また、制駆動力制御における目標減速度Xgs_decが閾値Xgs_startを超えると制駆動力制御量が増加するとともに反力増加量ΔFが減少するので、不所望に大きな減速感を運転者に与えることを抑制しつつ、カーブを逸脱しないで走行できるように自車両を適切に減速させることができる。
なお、第2の実施の形態においても、上述した第1の実施の形態と同様に、制御対象点1の後に制御対象点2が設定されている場合は、制御対象点1を通過してからの反力制御量ΔFの低下を抑制することもできる。
このように、以上説明した第2の実施の形態においては、上述した第1の実施の形態による効果に加えて以下のような作用効果を奏することができる。
(1)コントローラ50は、制駆動力制御が開始するときに、操作反力制御に対して制駆動力制御を優先して行う。具体的には、操作反力制御による操作反力の伝達を抑えるとともに、制駆動力制御による制駆動力を増加して自車両の減速と減速によって運転者に与える減速感を強調するようにする。これにより、制駆動力制御が開始し、操作反力制御と制駆動力制御がともに行われる状態において、運転者に過度の減速感を与えることなく制御状態をスムーズに移行することができる。
(2)コントローラ50は、制駆動力制御が開始するときに、前方道路からの逸脱のリスクが上昇していることを運転者に認識させるような操作反力を発生させる。これにより、制駆動力制御の開始時に逸脱のリスクが上昇していることを運転者に認識させることができ、その後の制駆動力制御を効果的に行うことができる。
(3)コントローラ50は、制駆動力制御が開始するときに操作反力制御による操作反力がピークとなり、制駆動力制御による制駆動力制御量の増加に伴って操作反力が低下するようにする。具体的には、図14(a)(b)に示すように、制駆動力制御の目標減速度Xgs_decが閾値Xgs_startに達する減速制御開始点において、反力制御量ΔFがピークとなるとともに、制駆動力制御量の増加に対して反力制御量ΔFが徐々に低下するように反力制御量ΔFを補正する。制駆動力制御の開始により制駆動力制御量が徐々に増加するときに、反力制御量ΔFも目標減速度Xgs_rfに従って増加すると、運転者は操作反力と制動力とによる過度の減速感を感じる可能性がある。そこで、制駆動力制御の開始時に反力制御量ΔFを補正することにより、運転者に過度の減速感を与えることなく、自車両が走行する際のリスクを確実に運転者に知らせることができる。さらに、操作反力制御のみが行われていた状態から、操作反力制御および制駆動力制御が行われる状態への移行をスムーズに行うことができる。
《第3の実施の形態》
本発明の第3の実施の形態による車両用運転操作補助装置について、図面を用いて説明する。第3の実施の形態による車両用運転操作補助装置の構成は、図1および図2に示した第1の実施の形態と同様である。ここでは、上述した第2の実施の形態との相違点を主に説明する。
第2の実施の形態においては、ナビゲーションシステム30から得られるノード点情報に基づいて道路の曲率半径Rnを算出した。第3の実施の形態においては、ナビゲーションシステム30から得られるノード点情報の信頼性が低い場合には、運転者による操舵角θに基づいて曲率半径を推定し、推定した曲率半径に基づいて目標減速度を算出する。なお、第3の実施の形態による車両用運転操作補助装置は、自車両の左右方向に発生する加速度(横加速度)を検出する加速度センサ(不図示)をさらに備えている。
以下に、第3の実施の形態による車両用運転操作補助装置の動作を説明する。ここで、例えば自車両が図4に示すようなノード点で表されるカーブに進入する場合を考える。コントローラ50は、カーブ入り口に対応する制御対象点1と、カーブにおける最小曲率半径を有する制御対象点2を設定し、それぞれに対する目標減速度を算出する。自車両がカーブ入り口の制御対象点1に接近すると、図15(a)(b)に示したように制御対象点1に対応する反力制御量ΔFおよび制駆動力制御量が発生し、自車両がカーブから逸脱しないように操作反力制御および制駆動力制御が行われる。自車両が制御対象点1を通過すると、制御対象点2に対する操作反力制御および制駆動力制御が行われる。
ただし、制御対象点1に対する操作反力制御および制駆動力制御が行われても自車両がカーブに適した減速を行わない場合は、ナビゲーションシステム30から得られるノード点情報の信頼性が低いことが考えられる。したがって、このような場合はナビゲーションシステム30からのノード点情報を用いずに、自車両の車両状態に基づいて道路の曲率半径を推定し、推定した曲率半径に基づいて操作反力制御および制駆動力制御を行うようにする。
そこで、自車両の車両状態、ここでは運転者による操舵角θ、ヨーレイト、および横加速度等に基づいて曲率半径(推定曲率半径Rn_est)を推定する。そして、推定曲率半径Rn_estに基づいて、自車両がカーブを逸脱しないように走行するための許容車速を算出する。具体的には、以下の(式9)にしたがって、制駆動力制御における許容車速V_limit_decと、操作反力制御における許容車速V_limit_rfを算出する。
V_limit_dec=(Yglimit・|Rn_est|)0.5
V_limit_rf=(Yglimit_rf・|Rn_est|)0.5 ・・・(式9)
(式9)において、Yglimit_rf<Yglimitである。
つぎに、推定曲率半径Rn_estと、加速度センサによって検出される現在の横加速度Ygとに基づいて、目標減速度Xgsの算出に用いる推定車速を算出する。推定車速V_estは、以下の(式10)で表される。
V_est=(Yg・|Rn_est|)0.5 ・・・(式10)
制駆動力制御および操作反力制御における目標減速度Xgsは、(式9)から算出した許容車速V_limit、(式10)から算出した推定車速V_est、および目標減速距離D_estを用いて、以下の(式11)にしたがって算出する。(式11)において、制駆動力制御における目標減速度をXgs_est_dec、操作反力制御における目標減速度Xgs_est_rfとする。
Xgs_est_dec=(V_est2−V_limit_dec2)/(2・D_est)
Xgs_est_rf=(V_est2−V_limit_rf2)/(2・D_est) ・・・(式11)
なお、目標減速距離D_estは、自車両の現在の車速Vが大きくなるほど大きくなるように適切に設定する。
さらに、(式11)から算出した制駆動力制御における目標減速度Xgs_est_decを制限値Xgs_limitによって制限し、補正した値を目標減速度補正値Xgs_dec_hとする。ここで、制限値Xgs_limitは、例えば図16に示すように運転者による操舵角θが大きくなるほど大きくなるように設定する。
コントローラ50は、上述した図8と同様のマップを用いて操作反力制御における目標減速度Xgs_est_rfからコーナースピード超過リスクRcvを算出し、上記(式6)から反力制御量ΔFを算出する。ただし、第2の実施の形態と同様に、制駆動力制御における目標減速度Xgs_est_decが閾値Xgs_startを超えると、反力制御量ΔFは徐々に低下し目標減速度補正値Xgs_dec_hに対応する値で固定される。
以上説明した第3の実施の形態による車両用運転操作補助装置の作用を、図17(a)(b)を用いて説明する。制御対象点1に対する操作反力制御および制駆動力制御は、上述した第2の実施の形態と同様である。自車両が制御対象点1を通過した後、自車両が十分に減速していない場合は、ナビゲーションシステム30からのノード点情報に基づく制御に代えて、車両状態に基づいて推定した曲率半径Rn_estに基づく操作反力制御および制駆動力制御を行う。
図17(a)に示すように、自車両が制御対象点1を通過した後、反力制御量ΔFは徐々に低下し、推定曲率半径Rn_estに基づいて算出した目標減速度Xgs_est_rfの増加に伴って再び増加する。制駆動力制御における目標減速度Xgs_est_decが閾値Xgs_startを超えると、反力制御量ΔFは徐々に低下し、目標減速度補正値Xgs_dec_hに対応する値で固定される。このとき、運転者による操舵角θが大きくなるほど制限値Xgs_limitが大きくなり、目標減速度補正値Xgs_dec_hも大きくなるので、反力制御量ΔFも大きくなる。
一方、制駆動力制御量は、図17(b)に示すように目標減速度Xgs_est_decが閾値Xgs_startを超えると徐々に増加し、目標減速度補正値Xgs_dec_hに応じた値に設定される。反力制御量ΔFおよび制駆動力は、自車両が例えばナビゲーションシステム30から得られるノード点情報に基づいて設定される制御対象点2を越えると、徐々に低下する。
このように、以上説明した第3の実施の形態においては、上述した第1および第2の実施の形態による効果に加えて、以下のような作用効果を奏することができる。
コントローラ50は、操舵角θ、ヨーレイト、および横加速度等の車両状態に基づいて曲率半径Rn_estを推定し、推定した曲率半径Rn_estに基づいて制駆動力制御および操作反力制御を行う。これにより、ナビゲーションシステム30から得られるノード点情報の信頼性が低い場合でも、制駆動力制御および操作反力制御を確実に行うことができる。また、運転者による操舵角θに応じて、図17(a)(b)に示すように反力制御量ΔFおよび制駆動力制御量を補正する。これにより、例えばきついカーブを走行する場合に、より大きな減速度を発生してカーブからの逸脱を防止するとともに、大きな操作反力により運転者の注意の喚起および減速操作への移行を促すことができる。
なお、ナビゲーションシステム30によるノード点情報に基づいて曲率半径Rnを算出する場合でも、図16に従って操舵角θに応じて目標減速度制限値Xgs_limitを設定することも可能である。
《第4の実施の形態》
本発明の第4の実施の形態による車両用運転操作補助装置について、図面を用いて説明する。第4の実施の形態による車両用運転操作補助装置の構成は、図1および図2に示した第1の実施の形態と同様である。ここでは、上述した第1の実施の形態との相違点を主に説明する。
第4の実施の形態においては、制駆動力制御を開始するための目標減速度Xgs_deの閾値Xgs_startを、自車両の走行状況に応じて変更する。具体的には、自車両が進入するカーブが交差点内のものであることを検出した場合には、制駆動力制御の開始を遅くするように閾値Xgs_startを設定する。また、制駆動力制御の開始を遅くする場合は、操作反力制御の開始を早める。
以下に、第4の実施の形態においてどのように操作反力制御および制駆動力制御を行うかを、図18を用いて説明する。図18は、第4の実施の形態のコントローラ50における運転操作補助制御処理の処理手順のフローチャートを示す。本処理内容は、一定間隔、例えば50msec毎に連続的に行われる。
ステップS500およびS510における処理は、図3に示したフローチャートのステップS100およびS110における処理と同様であるので説明を省略する。なお、ステップS500においてナビゲーションシステム30からノード点情報を読み込む際に、ノード点の付加情報である道路の幅、道路の種別、交差点やトンネルの有無、および進入禁止路等の情報をあわせて読み込む。
ステップS520では、走行経路上の一つの分岐路を制御対象経路として選択する。ここで選択した制御対象経路は、操作反力制御および制駆動力制御の目標(対象)となる経路である。第4の実施の形態においては交差点を検出することを前提とするものであり、ここでは、交差点内を通る、あるいは交差点を形成する複数の分岐路から一つの分岐路を制御対象経路として選択する。
具体的には、例えば運転者が自車両の走行経路として予め一つの分岐路を指定している場合、指定された分岐路を制御対象経路として選択する。また、運転者が一つの分岐路を指定していない場合は、ステップS510で算出した各ノード点における曲率半径Rnを参照して、一つの分岐路を制御対象経路として選択する。例えば、曲率半径Rnが最大である分岐路を選択する。
ステップS530では、ステップS520で選択した分岐路(制御対象経路)がT字交差点のものであるか否かを判定する。具体的には、選択した分岐路内のノード点情報に付加されている、例えば交差点種別の情報に基づいて、その分岐路がT字交差点内のものであるか否かを判定する。
なお、交差点形状が異なり、形式的にはT字交差点でない場合でも、実質的にT字交差点であるとみなされる場合は、T字交差点であると判定することも可能である。例えば運転者が予め走行経路を設定しており、設定した走行経路内の交差点、例えば十字交差点で右左折を行う場合や、交差点(例えば十字交差点)の直進路が一方通行路で進入できない場合は、実質的にT字交差点と同様に車両が進入するので、T字交差点と判定してもよい。
このようにT字交差点を検出した場合、当該交差点内のコーナ(ノード点)に対する交差点フラグflg_crにTRUEを付与する(flg_cr=TRUE)。一方、T字交差点でない場合は、コーナ(ノード点)に対する交差点フラグflg_crにFALSEを付与する(flg_cr=FALSE)。ここで、交差点コーナとなるノード点は、交差点判定で使用したノード点、例えば交差点属性が付与されているノード点である。図19に、ナビゲーションシステム30を用いてノード点から取得できるT字交差点の例を示す。図19に示すように、交差点内の一つのノード点が交差点コーナとされる。
ステップS540では、ステップS530で検出したT字交差点を、運転者が自車位置から認識しやすいか否かを判定する。具体的には、T字交差点の手前の走行環境に基づいて、T字交差点が自車位置から認識しやすいか否かを判定する。そこで、T字交差点に接続する道路形状、すなわち現在走行中の交差点手前の道路形状を基準としたT字交差点の認識のしやすさを第1の評価値Srとし、信号機やトンネル等の道路に存在する設備の有無を基準としたT字交差点の認識のしやすさを第2の評価値Sfとし、前方車両を基準としたT字交差点の認識のしやすさを第3の評価値Soとして以下のように設定する。
(1)第1の評価値Srの設定
T字交差点の手前の道路形状に基づいて第1の評価値Srを設定する。ここで、T字交差点の手前の道路形状については、図20に示すようにT字交差点の手前のノード点に基づいて得る。T字交差点の手前の道路形状が「直線」「緩カーブ」「中カーブ」「急カーブ」である場合、評価値Srは、それぞれ「1」「0.8」「0.5」「0.2」に設定する。すなわち、カーブが緩くなるほど第1の評価値Srを大きい値に設定し、前方のT字交差点を自車位置から運転者が認識しやすいと考えられるほど、第1の評価値Srを大きい値とする。
ここで、例えば「直線」「緩カーブ」「中カーブ」「急カーブ」の区別は、T字交差点に接続するカーブの長さ、およびそのカーブの積算旋回角により行う。例えば、カーブの長さが長いほど、または積算旋回角が大きいほど、急なカーブとする。なお、T字交差点に接続するカーブのノード点(T字交差点として選択したノード点を除いたノード点)の曲率半径Rnのうち、最小である曲率半径Rnに基づいてカーブ種別を区別することもできる。
(2)第2の評価値Sfの設定
T字交差点の手前の道路に存在する設備(以下、道路付帯設備という)に基づいて第2の評価値Sfを設定する。具体的には、T字交差点の手前の道路付帯設備との関係で、前方のT字交差点を自車位置から運転者が認識しにくいと考えられるほど、第2の評価値Sfを小さい値に設定する。
例えば、T字交差点に図21に示すような信号機301がない場合、第2の評価値Sfを0.5に設定する。また、図22に示すようにT字交差点の手前にトンネル302がある場合、第2の評価値Sfを0.5に設定する。なお、T字交差点の手前にトンネルがある場合でも、交差点に進入するよりも十分手前でトンネルを抜けることができるような場合には、第2の評価値Sfを1にリセットすることもできる。なお、信号機は、実際には交差点に設置されている設備であるが、運転者による交差点の認識性に着目した場合、信号機は交差点の手前の道路に存在する道路付帯設備とみなすことができる。
(3)第3の評価値Soの設定
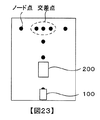
レーザレーダまたはミリ波レーダ等の検出器(不図示)により、先行車の有無、先行車までの車間距離および先行車の大きさ等を検出する。そして、検出された先行車がバスやトラック程度の大きさで自車両の視界を遮る大きさである場合は、図23に示すように自車両100と先行車200との車間時間THWに応じて第3の評価値Soを設定する。例えば、車間時間THWが5secよりも大きい場合は第3の評価値So=1、車間時間THWが3〜5secの場合は第3の評価値So=0.6、車間時間THWが3sec未満の場合は第3の評価値So=0.2に設定する。
また、先行車200の大きさが、自車両の運転者の視界を遮らない程度である場合は、第3の評価値Soを1に設定する。また、前方車両が存在しない場合も、第3の評価値Soを1に設定する。なお、自車両と先行車との車間時間THWに応じて第3の評価値Soを連続的に設定することもできる。この場合、車間時間THWが大きくなるほど第3の評価値Soが大きくなるように設定する。
以上のように設定した第1から第3の評価値Sr、Sf、Soから、以下の(式12)により総合評価値Stを得る。
St=Sr・Sf・So ・・・(式12)
(式12)から算出される総合評価値Stは、自車位置を基準としたT字交差点の認識のしやすさを示す値となり、0〜1で変化する。すなわち、自車両の走行環境を総合的に判断して前方のT字交差点を運転者が自車位置から認識しやすい場合は、総合評価値Stが大きな値となる。
つづくステップS550では、ステップS500でノード点情報を読み込んだ複数のノード点の中から、制駆動力制御および操作反力制御の対象とする制御対象点(目標ノード点)を算出する。ここでは、T字交差点を示すフラグが付与されたノード点およびその前後のノード点のうち、曲率半径Rnが最小となるノード点を目標ノード点として選択する。
ステップS560では、ステップS550で算出した制御対象点を走行する際の目標車速V0を算出する。目標車速V0は、制御対象点の曲率半径Rnと、予め設定した許容横加速度Yglimit(例えば0.3G)を用いて、以下の(式13)から算出することができる。
V0=(Yglimit・|Rn|)0.5・・・(式13)
ステップS570では、制御対象点における目標減速度Xgsを、自車速Vおよび制御対象点までの距離Lnを用いて以下の(式14)に従って算出する。
Xgs=(V2−V02)/(2・Ln)
=(V2−Yglimit・|Rn|)/(2・Ln) ・・・(式14)
なお、目標減速度Xgsは、減速時に正値となる。
つづくステップS580では、制駆動力制御開始の判断に用いる閾値Xgs_startと、操作反力制御開始の判断に用いる閾値Xgs_warnを設定する。具体的には、ステップS530においてT字交差点を検出した場合(flg_cr=TRUE)に、以下のようにして制駆動力制御開始判断閾値Xgs_startを設定する。
まず、ステップS540で算出したT字交差点の認識しやすさの総合評価値Stを用いて、以下の(式15)から第1の判断許容値Xgs_max1を算出する。
Xgs_max1=Xgs_norm+Xgs_tup・St ・・・(式15)
ここで、Xgs_normは、通常の制駆動力制御の作動開始タイミングを決定するための通常設定値であり、第1の実施の形態で用いた閾値Xgs_startに相当する。Xgs_normは、例えば0.1Gとする。Xgs_tupは、T字交差点の検出によって設定変更するための基準値であり、例えば0.1Gとする。
そして、(式15)から算出した第1の判断許容値Xgs_max1を、制駆動力制御開始判断閾値Xgs_startとして設定する(Xgs_start=Xgs_max1)。
さらに、制御対象点と自車両との間の距離Lnと自車速Vとを用いて、以下の(式16)から到達時間Tlnを算出する。
Tln=Ln/V ・・・(式16)
(式16)から算出された到達時間Tlnが所定値以下の場合は、到達時間Tlnに対応する第2の判断許容値Xgs_max2を設定する。そして第1の判断許容値Xgs_max1と、第2の判断許容値Xgs_max2のいずれか大きいほうを、以下の(式17)より制駆動力制御開始判断閾値Xgs_startとして設定する。
Xgs_start=max(Xgs_max1、Xgs_max2) ・・・(式17)
以上より、例えば制駆動力制御開始判断閾値Xgs_startとして第1の判断許容値Xgs_max1が設定された場合、制駆動力制御開始判断閾値Xgs_startはT字交差点の認識しやすさの総合評価値Stに応じて変化する。したがって、制駆動力制御開始判断閾値Xgs_startは、前方のT字交差点を自車位置から運転者が認識しやすいほど大きい値となる。
なお、T字交差点が検出されない場合(flg_cr=FALSE)は、制駆動力制御開始判断閾値Xgs_startとして通常設定値Xgs_normを設定する。
さらに、(式15)または(式17)から算出した制駆動力制御開始判断閾値Xgs_startを用いて、以下のように操作反力制御開始判断閾値Xgs_warnを設定する。ここでは、T字交差点が検出されない場合の制駆動力制御開始判断閾値をXgs_start(=Xgs_norm)、T字交差点が検出された場合の制駆動力制御開始判断閾値をXgs_start_aftとして説明する。
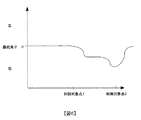
図24に示すように、制駆動力制御開始判断閾値Xgs_startがXgs_start_aftに補正されると、制駆動力制御が開始されてから自車両が制御対象点を通過するまでの時間(減速制御時間b)が短くなる。そこで、減速制御時間bが短くなる、すなわち制駆動力制御の開始タイミングが遅くなる場合は、操作反力制御開始判断閾値Xgs_warnを小さくして操作反力制御の開始タイミングを早める。
具体的には、図25に示すように減速制御時間bが短くなるほど、操作反力制御を開始してから制駆動力制御を開始するまでの時間(反力制御時間a)が長くなるように設定する。反力制御時間aは、目標減速度XgsがXgs_warnからXgs_start_aftまで増加するまでに予測される時間である。これにより、減速制御時間bは短縮されるが、反力制御時間aは延長され、操作反力制御の開始タイミングが早くなる。なお、図24においてT字交差点が検出されない場合の操作反力制御開始判断閾値をXgs_warn、制駆動力制御開始判断閾値Xgs_startの補正に応じて設定された操作反力制御開始判断閾値をXgs_warn_aftとする。
操作反力制御開始判断閾値Xgs_warnの変化に応じて、操作反力制御を開始するときの反力制御量ΔFは図26に示すように変化する。すなわち、操作反力制御開始判断閾値Xgs_warnが小さいほど操作反力制御の開始タイミングは早くなるが、発生する反力制御量ΔFは小さいので運転者にわずらわしさを与えることがない。
なお、制駆動力制御開始判断閾値Xgs_start(またはXgs_start_aft)および操作反力制御開始判断閾値Xgs_warn(またはXgs_warn_aft)は、減速制御時間bおよび反力制御時間aがそれぞれ所定値、例えば4secを超えないように設定する。
このようにステップS580で制駆動力制御開始判断閾値Xgs_startおよび操作反力制御開始判断閾値Xgs_warnを設定した後、ステップS590へ進む。
ステップS590では、ステップS570で算出した目標減速度Xgsと、ステップS580で算出した操作反力制御開始判断閾値Xgs_warnに基づいて、図3のフローチャートのステップS150と同様に操作反力制御開始判断を行う。つづくステップS600では、ステップS570で算出した目標減速度Xgsと、ステップS580で算出した制駆動力制御開始判断閾値Xgs_startに基づいて、図3のステップS160と同様に制駆動力制御開始判断を行う。
ステップS610では、ステップS570で算出した目標減速度Xgsを補正する。ここでは、例えばステップS580で算出した制駆動力制御開始判断閾値Xgs_startを用いて目標減速度Xgsを制限し、目標減速度補正値Xgs_hを算出する。なお、目標減速度Xgsが制駆動力制御開始判断閾値Xgs_startを超えない場合は、目標減速度Xgsをそのまま目標減速度補正値Xgs_hとして設定する。
つづくステップS620〜S680での処理は、図3のステップS180〜S240での処理と同様であるので説明を省略する。
−第4の実施の形態の変形例−
自車両の前方にT字交差点が検出された場合に、制駆動力制御開始判断閾値Xgs_startを小さくするように設定することもできる。具体的には、図27に示すように通常設定値Xgs_startよりも閾値Xgs_start_aftを小さい値に設定する。この場合、減速制御時間bが長くなるので、図25の関係に従って反力制御時間aを短くする。なお、この場合も減速制御時間bおよび反力制御時間aはそれぞれ所定値(例えば4sec)を超えないように設定する。閾値Xgs_startを通常設定値Xgs_normよりも小さい値に設定する場合は、目標減速度Xgsを補正後の閾値Xgs_start_aftで制限する。
また、自車両の前方にT字交差点を検出したときだけでなく、自車両のカーブ進入時に減速を開始していない先行車があるときに、制駆動力制御の開始タイミングおよび操作反力制御の開始タイミングを変更することもできる。
このように、以上説明した第4の実施の形態においては、上述した第1から第3の実施の形態による効果に加えて以下のような作用効果を奏することができる。
コントローラ50は、自車両周囲の走行状況に基づいて制駆動力制御および操作反力制御の開始タイミングを調整する。具体的には、走行状況に応じて制駆動力制御開始判断閾値Xgs_startを変更し、目標減速度Xgsが閾値Xgs_startを超えてから自車両が制御対象点を通過するまでの減速制御時間bに応じて操作反力制御開始判断閾値Xgs_warnを変更する。例えば図24に示すように閾値Xgs_startを通常値Xgs_normよりも大きくする場合は、閾値Xgs_warnを通常値よりも小さくする。これにより、閾値Xgs_startが大きくなって制駆動力制御の開始タイミングが遅くなる場合は、操作反力制御の開始タイミングが早くなる。その結果、早い段階から逸脱のリスクを運転者に伝達しながら、違和感なく制駆動力制御を開始することができる。また、閾値Xgs_startの増加によって制駆動力制御によって発生する制駆動力制御量も大きくなるが、操作反力制御を早いタイミングで開始し、徐々に反力制御量ΔFを大きくしていくので、運転者に違和感を与えることなく制御の作動状態を移行することができる。
一方、図27に示すように制駆動力制御開始判断閾値Xgs_startが通常値Xgs_normよりも小さくなる場合は、操作反力制御開始判断閾値Xgs_warnが大きくなる。これにより、操作反力制御の開始タイミングが遅い場合は速やかに制駆動力制御を開始して自車両がカーブから逸脱しないような減速度を与えることができる。
上述した第1から第4の実施の形態においては、運転操作装置としてアクセルペダル62およびブレーキペダル72を用い、逸脱のリスクに応じてアクセルペダル反力制御およびブレーキペダル反力制御を行った。しかしこれには限定されず、アクセルペダル反力制御およびブレーキペダル反力制御のいずれか一方を行うこともできる。
上述した第1から第4の実施の形態においては、自車両が図4に示すようなノード点で表されるコーナーに進入する場合を例とし、コーナー入り口の制御対象点1およびコーナー内の最小曲率半径を有する地点である制御対象点2を設定して操作反力制御および制駆動力制御を行った。ただしこれには限定されず、あるコーナーにおいて一つの制御対象点を設定したり、3つ以上の制御対象点を設定することももちろん可能である。
以上説明した第1から第4の実施の形態においては、車両状態検出手段として車速センサ10を用い、道路形状検出手段としてナビゲーションシステム30、コントローラ50、操舵角センサ20を用い、逸脱リスク算出手段としてコントローラ50を用いた。また、制駆動力制御手段としてコントローラ50、駆動力制御装置80および制動力制御装置80を用い、操作反力制御手段としてコントローラ50、アクセルペダル反力制御装置60およびブレーキペダル反力制御装置70を用い、制御調整手段としてコントローラ50を用いた。さらに、走行状況検出手段としてナビゲーションシステム30を用い、タイミング調整手段としてコントローラ50を用いた。ただし、これらには限定されず、道路形状検出手段として、路車間通信によって道路の曲率半径を取得することも可能である。また、走行状況検出手段として自車両の前方領域を撮像する小型のCCDカメラ等を使用することも可能である。