JP4332665B2 - 物品搬送装置 - Google Patents
物品搬送装置 Download PDFInfo
- Publication number
- JP4332665B2 JP4332665B2 JP2003325174A JP2003325174A JP4332665B2 JP 4332665 B2 JP4332665 B2 JP 4332665B2 JP 2003325174 A JP2003325174 A JP 2003325174A JP 2003325174 A JP2003325174 A JP 2003325174A JP 4332665 B2 JP4332665 B2 JP 4332665B2
- Authority
- JP
- Japan
- Prior art keywords
- wheel
- gripping member
- gripping
- gripper
- wheels
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 230000001105 regulatory effect Effects 0.000 claims description 4
- 210000000078 claw Anatomy 0.000 description 14
- 230000002093 peripheral effect Effects 0.000 description 8
- 239000011295 pitch Substances 0.000 description 3
- 238000004519 manufacturing process Methods 0.000 description 2
- 230000000694 effects Effects 0.000 description 1
- 238000000605 extraction Methods 0.000 description 1
Images






Landscapes
- Specific Conveyance Elements (AREA)
Description
また、その他の従来の物品搬送装置として、例えば特許文献2が知られている。この特許文献2においては、重合させて配置した上下のホイールの円周方向における相対位置を変更することで、両ホイールにわたって形成したポケットの大きさを変更するようにしている。それによって、大きさの異なる容器を移送できるようになっている。
さらに、その他の従来の物品搬送装置として、例えば特許文献3が知られている。この特許文献3のグリッパにおいては、重合させて配置した上下のホイールに、それぞれグリッパを構成する把持部材を配置し、各ホイールの回転駆動をサーボモータで制御することにより、容器の把持と移送とを行うようになっている。
また、上記特許文献2の物品搬送装置においては、比較的簡単な構成によって大きさが異なる容器を移送することが可能である。しかしながら、各ポケットは容器を把持する構成にはなっていないので、この特許文献2の物品搬送装置は、PET容器の首部を把持するようなネックグリッパには使用できないという欠点があった。
さらに、上記特許文献3に開示された従来技術においては、上下のホイールを相対移動させることにより全てのグリッパを一斉に開閉させるようにしている。つまり、各グリッパを個別に開閉させることはできないので、連続搬送されるPET容器の首部を把持する場合には特許文献3の装置は適用できないという欠点があった。
上記グリッパは、上記第1ホイールに移動可能に配設した一方の把持部材と、上記一方の把持部材と対向させて上記第2ホイールに移動可能に配設した他方の把持部材と、上記両把持部材を相互に近接する方向に付勢する付勢手段と、上記付勢手段によって付勢された上記両把持部材の停止位置を規制するストッパ手段とを備え、
上記ストッパ手段は、上記第1ホイールに設けられて上記一方の把持部材の停止位置を規制する第1のストッパ部材と、上記第2ホイールに設けられて上記他方の把持部材の停止位置を規制する第2のストッパ部材とからなり、
上記グリッパの両把持部材は、それらに作用する上記付勢手段の付勢力によって物品を把持するようにした物品搬送装置を提供するものである。
したがって、製造コストが低く、かつ兼用性に優れたグリッパを提供することができる。
図2に示すように、図示しないフレームに円筒部材7を鉛直方向に取り付けあり、この円筒部材7にベアリング8、8を介して回転軸11を回転自在に軸支している。この回転軸11の上端に上記ベースホイール2の中央部を嵌着するとともに、回転軸11の下端部に駆動ギヤ12の中央部を嵌着している。駆動ギヤ12は図示しないギヤを介して図示しないモータと連動させてあり、このモータが回転駆動されると、ベースホイール2と両ホイール3,4およびそれらに設けた各グリッパ6が、図1における時計方向に回転されるようになっている。
他方、第2ホイール4は、平坦なリング状の本体部4Aと、その内周部から軸方向の下方側に伸びる筒状部4Bとを備えている。本体部4Aの半径方向の寸法は第1ホイール3の半径方向寸法と同じに設定してあり、筒状部4Bの外径は、上記第1ホイール3の内径と同じ寸法に設定している。
そして、第2ホイール4の本体部4Aを第1ホイール3の上面に載置するとともに、第2ホイール4の筒状部4Bの外周部を第1ホイール3の内周面に接触させている。これにより、第1ホイール3と第2ホイール4は円周方向に相対移動可能となっている。
第2ホイール4の円周方向の等間隔位置に長穴4Cを穿設してあり、それらの長穴4Cの位置に合わせて、第1ホイール3にも長穴3Aを穿設している。また、さらにベースホイール2にも両ホイール3,4の長穴3A、4Cの中央部の位置に合わせて貫通孔2Aを穿設している。そして、両ホイール3,4の長穴3A、4Cおよびベースホイール2の貫通孔2Aにわたってボルト13を挿通して、このボルト13の先端にナット14を螺合することにより各ホイール2,3,4を連結している。ボルト13にナット14で強く締め付けることにより、各ホイール2,3,4が一体に連結されるようになっている。他方、ナット14を緩めることにより、第1ホイール3の長穴3Aの空間分だけ、第1ホイール3はベースホイール2に対して円周方向に相対移動することができるとともに、両ホイール3,4はそれらの長穴3A、4Cの空間分だけ円周方向に相対移動できるようになっている。
これによって、グリッパ6が備える一対の把持部材15,15’の間隔を調整して、各グリッパ6によって大きさが異なる容器5を把持できるようにしている。
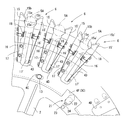
そして、各切欠き部4Dの位置に容器5の首部5Aを把持する各グリッパ6を取り付けている。各グリッパ6は、両ホイール3,4の放射方向に沿って配置した左右一対の把持部材15、15’と、これら両把持部材15、15’を両ホイール3,4に連結する左右一対の板ばね16、16’と、上記両把持部材15、15’の内方側の端部と係合してそれらの各ホイール3,4上における停止位置を規制する左右一対のストッパ部材17、17’とを備えている。すなわち、上記両把持部材15、15’は容器5を把持していない場合、ストッパ部材17、17’と当接することにより、その閉鎖位置を規制されている。
両把持部材15、15’は相互に対向する同じ高さに配置されており、それらの部材における対向位置に円弧状の凹部を形成してあり、そこを係合部15a、15a’としている。両把持部材15,15’にわたって引っ張りばね18を取り付けてあり、それによって、両把持部材15,15’を相互に近接する方向に付勢している。そのため、両係合部15a、15a’は、両板ばね16、16’の弾性および上記引張りばね18によって相互に近接するように付勢されている。これら両係合部15a、15a’によって容器の5の首部5Aを把持するようにしている。
各把持部材15、15’における係合部15a、15a’の隣接外方位置となる先端部は、各ホイール3,4の放射方向に対して傾斜させたガイド部15b、15b’としている。これら両ガイド部15b、15b’が隔てた概略V字形の空間部内に容器5の首部5Aが案内されてから容器5の首部5Aと両把持部材15,15’が近接する方向に相対移動されることで、首部5Aが両ガイド部15b、15b’に係合した後、引っ張りばね18および板ばね16、16’の弾発力に抗して両ガイド部15,15b’が両ストッパ部材17、17’から離れて拡開され、その後、首部5Aが係合部15a、15a’の間に挿入されて、それら両係合部15a、15a’によって把持されるようになっている。つまり、本実施例のグリッパ6においては、両板ばね16,16’の弾発力および引っ張りばね18の引っ張り力を両把持部材15,15’に作用させて、それら両把持部材15,15’によって容器5の首部5Aを把持するようにしている。
他方、右方の板ばね16’の外方側の端部は、右方の把持部材15’の側部に連結してあり、板ばね16’の内方側の端部は、上記切欠き部4Dの空間を介して下方側の第1ホイール3に固定したストッパ部材17’の側部に連結されている。つまり、右方の板ばね16’及びストッパ部材17’を介して右方の把持部材15’は第1ホイール3に連結されるとともに、板ばね16’の弾発力および引っ張りばね18によって左方の把持部材15に向けて常時付勢されている。
このように対向位置の左右の把持部材15,15’は、各板ばね16,16’および引っ張りばね18によって相互に当接する方向に常時付勢されているが、左右一対のストッパ部材17、17’によって、各ホイール3,4上における各把持部材15,15’の停止位置を規制している。
左方側のストッパ部材17は、切欠き部4Dの隣接位置となる第2ホイール4上の放射方向に固定している。このストッパ部材17の左方側の側部に板ばね16の端部を連結してあり、それによって板ばね16の先端に連結した把持部材15における右方側の内方部がストッパ部材17の先端側部に当接して、把持部材15はその位置に停止している。つまり、ガイド部15bに容器5の首部5Aが係合しない状態では、把持部材15は第2ホイール4の円周方向所定位置に、放射方向に沿って維持されている。
これと同様に、右方側のストッパ部材17’は、切欠き部4Dの空間部を介して第1ホイール3の上面に、その放射方向に沿って固定されている。そして、このストッパ部材17’の右方側の側面に板ばね16’の端部を連結してあり、この板ばね16’の付勢力によってストッパ部材17’の先端部の側面に把持部材15’の内方側の側面が当接している。これにより、把持部材15’は、第1ホイール3の円周方向所定位置に位置決めされる。つまり、ガイド部15b’に容器5の首部5Aが係合しない状態では、把持部材15’は第2ホイール4の円周方向所定位置に放射方向に沿って維持されている。
そして、本実施例では、上述したように第1ホイール3と第2ホイール4は、円周方向に相対移動されるようになっており、それらの円周方向における相対移動量を調整することで、各グリッパ6の両把持部材15,15’の間隔を一斉に調整して、それらの両係合部15a、15a’の間隔を調整するようにしている。
両ホイール3,4の内周部の2箇所に同一形状の切欠き部3C,4Fを形成してあり、それらの円周方向の周面に等ピッチで上記係合溝3B、4Eを形成している。両ホイール3,4の係合溝3B、4Eの寸法と円周方向におけるピッチは同じに設定している。
他方、係合爪22の下端部は断面を楕円形とした嵌合部22Aとしてあり、この嵌合部22Aをベースホイール2に形成した放射方向の長穴2Bに摺動自在に係合させている。これにより、係合爪22は各ホイール2,3,4の放射方向に進退移動できるようになっている。係合爪22の先端部22Bは、上記係合溝3B、4Eと係合出来るクサビ状に形成している。この係合爪22とベースホイール2上のピン23にわたってばね24を弾装してあるので、係合爪22は常時放射方向外方側に向けて付勢されて、先端部22Bが両ホイール3、4の係合溝3B、4Eと係合するようになっている。
本実施例では、各ホイール3,4に各4個の係合溝3B、4Eをそれぞれ形成してあり、各ホイール3,4の何れの係合溝3B、4Eを係合爪22に係合させるかによって、両ホイール3,4の円周方向の相対位置を決めるようになっている。
図5に示すように、第1ホイール3の左方端にある係合溝3Bと第2ホイール4の左方端にある係合溝4Eに係合爪22が係合した状態では、各グリッパ6における両把持部材15,15’の係合部15a、15a’の間隔が最小となる。
つまり、首部5Aの外径が最小の容器5をグリッパ6で把持する場合には、この状態とする。
他方、第1ホイール3の右方端にある係合溝3Bと第2ホイール4の左方端にある係合溝4Eとが係合爪22に係合した状態では、各グリッパ6における両把持部材15,15’の係合部15a、15a’の間隔が最大となる。つまり、首部5Aの外径が最大の容器5をグリッパ6で把持する場合にはこの状態にする。
係合爪22に対して両ホイール3,4の各係合溝3B、4Eの何れを係合させるかによって、首部5Aの大きさが異なる複数種の容器5を各グリッパ6で把持 出来るようになっている。
係合爪22に対して係合する両ホイール3,4の各係合溝3B、4Eを変更する場合には、先ずボルト13とナット14を緩めてから両ホイール3,4を円周方向に所要量だけ相対移動させる。このように相対移動させると、係合溝3B,4Eに係合している状態の係合爪22がばね24に抗して半径方向内方に押し戻された後、順次隣接位置の係合溝3B、4Eと係合するようになっている。これにより、各グリッパ6の左右の把持部材15,15’の間隔を一斉に調整できるようになっている。
このように調整作業が終わったら、上記ボルト13とナット14を再度締め付けて、両ホイール3,4の円周方向における相対位置の位置決めが終了する。これにより、両ホイール3,4にわたって設けたグリッパ6の把持部材15,15’の間隔を、容器5の首部5Aに応じた間隔に調整することが出来る。
そして、各グリッパ6が備える把持部材15、15’の間隔は、両ホイール3,4を円周方向に相対移動させてから、位置決め手段21の係合爪22を両ホイール3,4における所要の係合溝3B、4Eと係合させることにより、容器5の首部5Aの大きさに応じて調整できるようになっている。
上記構成のグリッパ6においては、各ホイール2、3、4の半径方向外方側から容器5がグリッパ6に向けて供給されると、容器5の首部5Aは両把持部材15,15のガイド部15b、15b’に押し付けられる。これに伴い、両板ばね16,16’の付勢力および引っ張りばね18に抗してガイド部15b、15b’が拡開されるので、容器5の首部5Aはガイド部15b、15b’に係合したままその隣接内方位置の係合部15a、15a’まで送り込まれてそれらによって把持されるようになっている。
このように容器5の首部5Aを把持した状態の各グリッパ6は、各ホイール2、3、4の時計方向の回転に伴って移動されるようになっている。
そして、容器5の首部5Aを把持した状態のグリッパ6が所定の排出位置間で搬送されると、その位置に設けた取り出し用の係合部材に容器5の首部5Aが係合するようになっている。それにより、両板ばね16、16’および引っ張りばね18に抗して両把持部材15,15’の間隔が広げられて、両把持部材15,15’による容器5の首部5Aの把持状態が解除されて、図示しない隣接位置の機械に向けて容器5が受け渡されるようになっている。
したがって、本実施例によれば、製造コストが低く、かつ兼用性に優れたグリッパ6を提供することができる。
なお、板ばね16、16’による付勢力が充分であれば、グリッパ6の引っ張りばね18は省略しても良い。
また、容器5以外の物品を搬送する物品搬送装置のグリッパにも本発明を適用することが出来る。
両把持部材15、15’によって容器5の首部5Aを把持していない状態では、一方の把持部材15がストッパ部材17に当接するとともに、他方の把持部材15’がストッパ部材17’に当接することで、両ホイール4,3上での停止位置を規制されるようになっている。その他の構成は、上述した第1の実施例と同じである。
このような第2実施例のグリッパ6を用いた物品搬送装置1であっても上記第1の実施例と同様の作用・効果を得る事ができる。
15…把持部材 15’…把持部材
16…板ばね(付勢手段) 16’…板ばね(付勢手段)
17…ストッパ部材(ストッパ手段)
17’…ストッパ部材(ストッパ手段)
Claims (2)
- 回転方向において相対移動可能な第1ホイールおよび第2ホイールと、これら第1ホイールおよび第2ホイールを一体的に回転させる駆動源と、上記両ホイールにわたってそれらの円周方向の複数箇所に配設されて物品を把持するグリッパとを備えた物品搬送装置であって、
上記グリッパは、上記第1ホイールに移動可能に配設した一方の把持部材と、上記一方の把持部材と対向させて上記第2ホイールに移動可能に配設した他方の把持部材と、上記両把持部材を相互に近接する方向に付勢する付勢手段と、上記付勢手段によって付勢された上記両把持部材の停止位置を規制するストッパ手段とを備え、
上記ストッパ手段は、上記第1ホイールに設けられて上記一方の把持部材の停止位置を規制する第1のストッパ部材と、上記第2ホイールに設けられて上記他方の把持部材の停止位置を規制する第2のストッパ部材とからなり、
上記グリッパの両把持部材は、それらに作用する上記付勢手段の付勢力によって物品を把持することを特徴とする物品搬送装置。 - 上記付勢手段は、第1ホイールに上記一方の把持部材を連結し、かつ、その把持部材を他方の把持部材に向けて付勢する第1の板ばねと、
上記第2ホイールに上記他方の把持部材を連結し、かつ、その把持部材を上記一方の把持部材に向けて付勢する第2の板ばねとからなることを特徴とする請求項1に記載の物品搬送装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003325174A JP4332665B2 (ja) | 2003-09-17 | 2003-09-17 | 物品搬送装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003325174A JP4332665B2 (ja) | 2003-09-17 | 2003-09-17 | 物品搬送装置 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2003425572A Division JP2005089182A (ja) | 2003-12-22 | 2003-12-22 | 物品搬送装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2005089110A JP2005089110A (ja) | 2005-04-07 |
| JP4332665B2 true JP4332665B2 (ja) | 2009-09-16 |
Family
ID=34455705
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2003325174A Expired - Fee Related JP4332665B2 (ja) | 2003-09-17 | 2003-09-17 | 物品搬送装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4332665B2 (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102014103956A1 (de) * | 2014-03-21 | 2015-09-24 | Khs Gmbh | Sterntaschenverstellung |
-
2003
- 2003-09-17 JP JP2003325174A patent/JP4332665B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2005089110A (ja) | 2005-04-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP2262708B1 (en) | Resilient clamp for holding a container by the neck | |
| JP3793271B2 (ja) | 容器用搬送星形車 | |
| JP2826544B2 (ja) | ベアリングの組立装置、その組立治具およびその組立ロボット | |
| JP5367056B2 (ja) | 容器保持搬送装置および容器保持搬送方法 | |
| RU2384519C2 (ru) | Передаточное устройство для машин для обработки сосудов | |
| US12187475B2 (en) | Variable pitch starwheel for container carrier applicating machine | |
| WO2012155208A1 (en) | A capping chuck | |
| JP3390326B2 (ja) | 回転式物品移送装置 | |
| JP4332665B2 (ja) | 物品搬送装置 | |
| JP5592916B2 (ja) | ワーク把持装置 | |
| JP2005089182A (ja) | 物品搬送装置 | |
| CN217373566U (zh) | 胎圈保持设备与胎圈操纵组件 | |
| KR20010034729A (ko) | 공구 링 및 그러한 공구 링을 포함하는 못 제조기 | |
| JP4301437B2 (ja) | 異径ボトル対応ボトルグリップ装置及びそれを用いたボトル搬送装置 | |
| JP2004307066A (ja) | グリップ装置 | |
| JP2009286565A (ja) | 容器保持装置 | |
| JP3209252B2 (ja) | クランプ式容器搬送装置のクランプアーム | |
| JP5592915B2 (ja) | ワーク把持装置 | |
| JP4310384B2 (ja) | ワークのハンドリング方法およびハンドリング装置 | |
| JP4418918B2 (ja) | 把持装置 | |
| JP6366350B2 (ja) | ラベル拡開機構 | |
| JPH08133251A (ja) | 容器位置決め装置 | |
| JPH11320293A (ja) | 扱胴の自動組立施設 | |
| JPH10230490A (ja) | 把持装置 | |
| JPH11130239A (ja) | ワーク整列装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20060428 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20090223 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20090225 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20090423 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20090526 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20090608 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120703 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4332665 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130703 Year of fee payment: 4 |
|
| LAPS | Cancellation because of no payment of annual fees |