JP4333055B2 - 変形計測システム及び方法 - Google Patents
変形計測システム及び方法 Download PDFInfo
- Publication number
- JP4333055B2 JP4333055B2 JP2001159040A JP2001159040A JP4333055B2 JP 4333055 B2 JP4333055 B2 JP 4333055B2 JP 2001159040 A JP2001159040 A JP 2001159040A JP 2001159040 A JP2001159040 A JP 2001159040A JP 4333055 B2 JP4333055 B2 JP 4333055B2
- Authority
- JP
- Japan
- Prior art keywords
- measurement
- deformation
- light
- psd
- displacement
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images






Landscapes
- Length Measuring Devices By Optical Means (AREA)
- Measurement Of Optical Distance (AREA)
Description
【発明の属する技術分野】
本発明は、自動車等の対象物の2つの部位間の相対変形を計測するための装置に関する。
【0002】
【従来の技術】
走行状態における車両各部の変形を実測する手法としては、車両各部に加速度ピックアップを取り付け、それらの出力信号を解析する方法が知られている。この方法では、加速度ピックアップで得られる各点の加速度を2回積分することでそれら各点の変位を求める。
【0003】
また、リング状変位センサとワイヤを組み合わせたものを車体に取り付け、2点間の距離を計測する手法も提案されている(マツダ自動車、自動車技術会2000年秋季大会)。
【0004】
また、CCDカメラを用いたステレオペアマッチングにより車両各部の変形を解析する方法も知られている。この方法では、車両にターゲットマークを印すとともに、車両に取り付けた2台のCCDカメラでそれらターゲットマークを撮影し、それら各カメラの撮影画像におけるターゲットマークの位置から、三角法の原理でそのマークの3次元的位置を計算する。同じターゲットマークの車両停止状態での位置と走行状態での位置とを比べることで、変形を求めることができる。
【0005】
【発明が解決しようとする課題】
加速度ピックアップを用いる方式は、シャシーダイナモ等を用いたベンチ試験では有効な方法であるが、テストコース等を実際に走行して行う実走行試験には適用が困難である。その理由は、車両が走行している場合、加速度ピックアップが検出する加速度は、車体変形による成分のみならず、走行による車両全体の加速度成分も含んでおり、これらを分離することが困難なためである。
【0006】
また、リング状変位センサを用いる上記方法は、実走行中ではワイヤが共振してしまうため、正確な変位を求めることが困難という問題がある。
【0007】
CCDカメラ等を用いたステレオペアマッチングは、実走行試験でも高い精度で変形を求めることができるが、計測前のカメラ等のキャリブレーションが繁雑であり、また画像処理に多くの時間を要するという問題がある。特に画像処理では、例えばステレオ画像において右画像と左画像とで同一のターゲットマークを識別したり、それらから三角法の演算を行ったりする必要があり、ターゲットマークの数が多いと非常に計算量が多くなる。さらには、周波数の高い振動的な変形挙動を分析しようとした場合、高フレームレートで撮影したステレオ画像に対して解析計算を行う必要があり、これをリアルタイムで実施することは極めて計算能力の高いコンピュータが必要であり、リアルタイム処理は現実的には非常に困難であった。
【0008】
本発明はこのような問題に鑑みなされたものであり、車両等の対象物の変形を、その対象物自体が全体的に運動する場合(車両が実走行状態にある場合など)でも正確に求めることができ、しかもその変形検出を実質的にリアルタイムで実行可能な技術を提供することを目的とする。
【0009】
【課題を解決するための手段】
上記目的を達成するため、本発明にかかる変形計測システムは、変形計測対象物の第1の部位に取り付けられ、複数の測定光ビームを出力する手段と、前記変形計測対象物の第2の部位に取り付けられ、前記各測定光ビーム毎にその二次元の受光位置を検出する手段と、前記各測定光ビームの二次元の受光位置に基づき、前記第1の部位と前記第2の部位の相対変形を計算する手段と、を備える。
【0010】
また、参考例にかかるシステムは、変形計測対象物の第1の部位に取り付けられ、複数の測定光ビームを出力してその各々の反射光を受光することにより、それら各測定光ビーム毎にその反射光の反射位置までの距離を計測する変位計と、前記変形計測対象物の第2の部位に取り付けられ、前記各測定光ビームを前記変位計に反射する反射手段と、前記各測定光ビーム毎の反射位置までの距離に基づき、前記第1の部位と前記第2の部位との相対変形を計算する手段と、を備える。
【0011】
また、本発明にかかるシステムは、変形計測対象物の第1の部位に対し相対的に固定状態となるよう取り付けられる変位計測装置であって、複数の測定光ビームを出力してその各々の反射光を受光し、それら各測定光ビーム毎にその反射光の反射位置までの距離を計測する変位計測装置と、変形計測対象物の第2の部位に対し相対的に固定状態となるよう取り付けられる受光位置検出装置であって、前記変位計測装置からの各測定光ビームを受光して各々の二次元の受光位置を検出する位置検出手段と、それら各測定光ビームを前記変位計測装置へと反射する反射手段と、を備えた受光位置検出装置と、前記変位計測装置で求められた前記各測定光ビーム毎の反射位置までの距離と、前記受光位置検出装置で求められる前記各測定光ビームの二次元の受光位置と、に基づいて前記第1の部位と前記第2の部位との間の相対変形を計算する変形演算装置とを備える。
【0012】
この構成の好適な態様では、前記反射手段は、前記位置検出手段の前面側に設けられ、入射する前記各測定光ビームの一部を前記変位計測装置に対して反射すると共に、別の一部を前記位置検出手段へと導くビームスプリッタである。
【0013】
また、本発明に係る方法では、複数の測定光ビームを出力してその各々の反射光を受光し、それら各測定光ビーム毎にその反射光の反射位置までの距離を計測する変位計測装置を、変形計測対象物の第1の部位に対し相対的に固定状態となるよう取り付け、前記変位計測装置からの各測定光ビームを受光して各々の二次元の受光位置を検出する位置検出手段と、それら各測定光ビームを前記変位計測装置へと反射する反射手段と、を備えた受光位置検出装置を、前記変形計測対象物の第2の部位に対し相対的に固定状態となるよう取り付け、前記変位計測装置で求められた前記各測定ビーム毎の反射位置までの距離と、前記受光位置検出装置で求められる前記各測定光ビームの二次元の受光位置と、に基づいて前記第1の部位と前記第2の部位との間の相対変形を計算する。
【0014】
【発明の実施の形態】
以下、本発明の実施の形態(以下実施形態という)について、図面に基づいて説明する。
【0015】
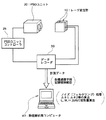
図1は、本発明にかかる変形計測システムの概略構成を示す図である。図に示すように、このシステムでは、2つのレーザ変位計10とPSDユニット20を用いる。このシステムは、車両等の対象物における2つの部位の間の相対変形を求めるためのものである。変形計測を行う場合、レーザ変位計10のペアが一方の部位に対して相対的に固定状態となるように取り付けられ、PSDユニット20がもう一方の部位に対して相対的に固定状態となるように取り付けられる。
【0016】
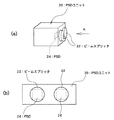
PSDユニット20の構造は図2に示される。図2において(a)は斜視図、(b)は該ユニット20を正面から(すなわち(a)の矢印Aの方向に)見た図である。この図に示すように、PSDユニット20は2つの二次元型のPSD(Position Sensitive Detector:位置検出器)24を内蔵している。2つのPSD24は所定の間隔を隔てて整列状態で配設されている。周知のように、PSDは光ビームの入射スポットの位置に比例したアナログ信号を出力する。矩形の2次元型PSDの場合、該PSDの矩形面内での光入射スポットのx座標を示す信号、及びy座標を示す信号を出力する。各PSD24の前面側(すなわちレーザビーム入射方向側)には、それぞれビームスプリッタ22が設けられる。ビームスプリッタ22は、レーザ変位計10からPSD24に向けて入射してくるレーザビームの一部を反射してレーザ変位計10に返すとともに、別の一部を真っ直ぐ透過させてPSD24に入射させる。PSD24のサイズは、計測対象物の変形により入射スポットの位置が相対的に移動しても、そのスポットがPSD24から出てしまわないような大きさにすることが好ましい。
【0017】
ここでは、レーザビームの受光位置を検出するデバイスとしてPSDを用いるが、これはあくまで一例である。本実施形態の方式は、PSDの代わりに、受光位置の2つの軸方向についての座標値に応じた信号を出力可能な他のデバイス、装置を用いても実現可能である。
【0018】
このシステムで用いられる2つのレーザ変位計10は、PSDユニット20の2つのPSD24にそれぞれ対応している。これら2つのレーザ変位計10を変形計測のために対象物に取り付ける場合、各レーザ変位計10の出力ビームがそれぞれ対応するPSD24に入射するよう、それらレーザ変位計10の配置を定める。もちろん、2つのレーザ変位計10を相互に固定して1つのユニットとすることも好適である。この場合、2つのレーザ変位計10の間隔(より端的には各変位計10が出力する平行なレーザビーム同士の間隔)がPSDユニット20における2つのPSD24の間隔と等しくなるよう、両変位計10の配置構成を定めればよい。
【0019】
レーザ変位計は、周知のように出力したレーザビームの反射光を受光し、該変位計から反射点までの距離を示す信号を出力する。ここでは、レーザ変位計として、反射光をPSD等の位置検出用素子で検出し、この検出信号から三角法の原理で反射位置までの距離を求めるタイプのものを用いる。もちろん、これはあくまで一例であり、このようなタイプのレーザ変位計でなくても、出力したレーザビームに基づき、そのレーザビームの反射点までの距離を求めることが可能なものであれば用いることができる。ただし、想定される対象物の変形量を測定できる測定範囲を持つことが必要である。各レーザ変位計10の出力信号(レーザ反射位置までの距離を示す信号)も、データレコーダ30に入力される。
【0020】
PSDユニットコントローラ25は、PSDユニット20を制御し、その中の各PSD24の出力信号(入射光スポットのx、y座標を示す信号)をデータレコーダ30に供給する。
【0021】
データレコーダ30は、レーザ変位計10及びPSDユニットコントローラ25から入力される各検出信号を、所定の記録媒体に記録したり、LANや無線LANなどの各種通信手段に対して出力したりする。また、データレコーダ30に表示装置や印刷出力装置を設け、それら各検出信号をリアルタイムで表示又は出力することも好適である。
【0022】
数値解析用コンピュータ40は、データレコーダ30から、記録媒体又は通信手段を介してそれら検出信号の情報を受け取り、それら検出信号から、計測対象である2つの部位間の相対変形を計算する。なお、この計算の詳細は後で説明する。
【0023】
図3は、このシステムの設置構成例を示した図である。この例は、自動車ボデーへの1つの取り付け例である。この例では、ボデーのフロントサイドメンバ100に対してレーザ変位計10のペアが、前輪サスペンション上部のスプリングサポートが取り付けられるサスペンションタワー110に対してPSDユニット20が取り付けられ、フロントサイドメンバ100とサスペンションタワー110との相対変形を計測する。フロントサイドメンバ100は比較的変形しにくい部位であり、この例では、この部位に対するサスペンションタワー110の変形を計測する。
【0024】
ここで、車両の各部位にレーザ変位計10やPSDユニット20をそのまま取り付けることは困難な場合が多いので、ここでは取り付け対象部位(この例ではサスペンションタワー110とフロントサイドメンバ100)に合わせた取付治具50、52を用意し、これを用いて取り付けている。レーザ変位計10の場合、フロントサイドメンバ100に存在する穴部を利用して取付治具50をフロントサイドメンバ100に対して固定し、この治具50に対してレーザ変位計10のペアを固定している。このように設置したレーザ変位計10のペアに対し、PSDユニット20は、その正面(ビームスプリッタ22の設置面)がレーザ変位計10のビーム出力面と対向するように取り付ける必要がある。そこで、この例では、サスペンションタワー110からレーザ変位計10設置部の上に張り出すように取付治具52を設け、この取付治具52の下面にPSDユニット20を取り付けることにより、上記配置構成を実現している。取付治具52は、サスペンションタワー110が備えているサスペンション取付用ナット等を利用してサスペンションタワー110に取付固定される。
【0025】
このようにして、各レーザ変位計10と、これらにそれぞれ対応するPSDユニット20の各PSD24とが、光学系を共用する状態で取り付けられる。すなわち、レーザ変位計10から発せられたレーザの一部が、対応するビームスプリッタ22により反射されてレーザ変位計10に戻ると共に、他の一部がそのビームスプリッタ22を透過してPSD24に入射するようになる。これにより、レーザ変位計10と対応PSD24とが、同じレーザビームを用いて各々の計測を行える状態となる。
【0026】
ここで、取付治具50,52は剛性の十分高いものとすることで、取付治具50,52自体の変形、振動などが実質上無視できる程度にする。これによりレーザ変位計10のペア及びPSDユニット20は、それぞれの計測対象の部位に対して相対的に固定状態となる形で取り付けられたこととなる。
【0027】
以上、レーザ変位計10のペア及びPSDユニット20の取り付け例について説明したが、このほかにPSDユニットコントローラ25やデータレコーダ30も、同じ車両の空きスペースに設置する。数値解析用コンピュータ40は車載することもできるし、別の場所に置かれたコンピュータをこの数値解析用コンピュータ40として利用することもできる。前者の場合、データレコーダ30から数値解析用コンピュータ40への計測データの供給は、LANなどを介して行えばよい。後者の場合は、可搬型の記録媒体にいったん記録したり、あるいは無線通信を利用したりするなどして、計測データを数値解析用コンピュータ40に供給することができる。
【0028】
次に図4及び図5を参照して、本実施形態のシステムによる相対変形の計算原理を説明する。
【0029】
まず図4を用いて、PSDユニット20の検出信号から計算される変形について説明する。ここで、説明をわかりやすくするため図示のごとく直交座標系L,W,Hをとる。L軸は対象物(例えば車両)の長さ方向の軸、W軸は幅方向の軸、H軸は高さ方向の軸である。ここで示した座標系の取り方は、レーザ変位計10及びPSDユニット20を図3のように取り付けた場合に対応しており、H軸が変位計10のレーザビーム源と対応PSD24とも結ぶ方向と一致している。
【0030】
ここでは、説明を簡単にするため、PSDユニット20のWL面内での位置・姿勢が、時刻t1を境に、図4(a)に示すように変化する場合を例にとる。なお図4で示しているPSDユニット20の位置・姿勢は、レーザ変位計10を基準とした相対的な位置・姿勢である。このようにPSDユニット20のWL面内での位置・姿勢が変化すると、各PSD24(以下、PSD1,PSD2と呼ぶ)のビーム受光スポットの当該PSD内での位置が変化する。すなわち、レーザ変位計10から見た場合のスポットの位置は変わらないが、PSDユニットが相対移動するため、個々のPSD1,2内での受光スポットの位置が変わり、それに応じてPSD1,2のL信号及びW信号が変化する。
【0031】
図4(b)はその変化を示しており、縦軸は変位(mm)、横軸は時間(秒)である。この例は、時刻t1以前の状態を変位0としてキャリブレーションされており、t1以後になってPSD1,2のL,W出力に変位量が現れている。
【0032】
ここでt1以前を基準状態(変形が起こっていない状態)し、この基準状態に対するt1以後の変形を計算する。PSDユニット20の検出結果からは、レーザ変位計10ペアとPSDユニット20との間の相対的なL方向変位、W方向変位、及びH軸回りのねじれ(回転)の合計3軸の変形(変位)が計算できる。
【0033】
まずある時点でのL方向変位,W方向変位は、その時点での例えばPSD1と2とのL出力信号の平均、W出力信号の平均からそれぞれ求めることができる。ただし、基準状態でのL,W信号がそれぞれ変位0を示すようにキャリブレーションされているものとする。キャリブレーションは、例えば変位計10からのレーザビームが対応するPSD24のちょうど中央に入射するよう変位計10ペア及びPSDユニット20を正確に位置決めして取り付けることで行ってもよい。また、この代わりに、基準状態でレーザビームがPSD24に入射した位置がL=0,W=0を示すよう例えばPSDユニットコントローラ25にてPSD24の出力を調整したり、あるいはそれより後段のデータレコーダ30や数値解析用コンピュータ40にその基準状態での入射スポット位置(L,W)を基準値として記憶し、計測値からその基準値を引くことで正しい変位を求めるようにしたりすることもできる。
【0034】
一方、H軸回りのねじれ角Δθ1は、次の関係式から計算することができる、[関係式1]
Δθ1=tan-1{(L1−L2)/(PSD1と2の間隔)}
ここで、L1はPSD1の受光スポットのL変位であり、L2はPSD2の受光スポットのL変位である。また、PSD1と2の間隔は、PSD1の中心点とPSD2と中心点との間隔のことである。ただし、ここでは、PSD1とPSD2は基準状態ではW方向に沿って並んでいるものとする。
【0035】
次に、図5を参照してレーザ変位計10のペアから計算される相対変形について説明する。この図に示している座標系は図4と同じ設定である。
【0036】
図5に示すように、各レーザ変位計10は、それぞれ対向位置にあるビームスプリッタ22により反射されてきたレーザビームを受光し、これに基づいて各変位計10からビーム反射位置(すなわち対応ビームスプリッタ22)までの距離H1,H2を求める。これら各距離H1,H2の例えば平均をとることにより、レーザ変位計10ペアとPSDユニット20との相対的なH方向変位が求められる(ただし、基準状態でのH方向距離0となるようにキャリブレーションされているものとする)。
【0037】
さらに、次の関係式から、L軸回りのねじれ角Δθ2を求めることができる。
【0038】
[関係式2]
Δθ2=tan-1{(H1−H2)/(PSD1と2の間隔)}
このようにして、レーザ変位計10のペアにより、H方向変位とL軸回りのねじれ角の合計2軸についての相対変形を求めることができる。
【0039】
以上説明したように、レーザ変位計10のペアとPSDユニット20とを上記のごとく光学系を共用するように設置して計測を行うことにより、L,W,H方向の各変位とH軸回り、L軸回りの各ねじれ角Δθ1,Δθ2という、合計5軸についての相対変形情報を得ることができる。
【0040】
なお、本実施形態では、レーザ変位計10及びPSDユニット20を、相対変形を計測したい2つの部位に対して直接ではなく、取付治具50及び52を介して取り付けている。上記測定原理は、レーザ変位計10とPSDユニット20との間の相対変形(変位)を求めるものであるが、取付治具50,52として十分変形しにくいものを用いていれば、当業者ならば明らかなように、その原理で求められる相対変形に対して簡単な変換(拡大、縮小など)を施すことにより、注目する2部位間の相対変形を求めることができる。
【0041】
図6は、本実施形態のシステムを図3のように車両に取り付けて行った実験で得られた、変形状態の時間変化の様子を示す図である。この例は、車両が正弦波状カーブに沿ってスラローム走行した場合の例であり、繁雑さを避けるため、W,H,L方向の3つの変位量の時間波形のみを示している。この図から、例えば、各方向の変位量がスラローム走行に従って変化しており、その変位の大きさが方向によって異なることが分かる。
【0042】
以上例示したシステムによれば、2つのレーザ変位計10と、2つのPSD24を備えたPSDユニット20とを、変位計10と対応PSD24とが光学系を共用する(すなわち同一レーザビームで計測できる)よう設置し計測を行うことで、比較的コンパクトな構成で5軸についての変形量を計測することができる。また、このシステムによれば、対象物(例えば車両)全体が運動しているような場合でも、レーザ変位計10ペアとPSDユニット20の間の相対変形成分のみが検出される。したがって、例えば自動車の実走行試験の場合にも、このシステムは適用可能である。また、このシステムによれば、各レーザ変位計10の出力信号、及び各PSD24の出力信号をデータレコーダ30でリアルタイム表示することができる。これら各出力信号はそれ自体が一種の変形情報を示しているといえるので、これをリアルタイム表示すれば、分析者は変形の様子をリアルタイムで知ることができる。また、これら各センサからの出力信号から上述の合計5軸の変形情報を得る計算自体も非常に簡単な計算なので、それら5軸の変形情報自体も実質的にリアルタイムで計算することができる。このように、本実施形態によれば、時々刻々の変形の様子をリアルタイムで求めることができる。
【0043】
以上、本発明の好適な実施の形態を説明したが、これはあくまで一例であり、本発明の技術的思想の範囲内で様々な変形が可能である。例えば、上述のレーザ変位計10ペアとPSDユニット20との組を複数組用意し、1対の部位間の相対変形を複数組同時に計測することも可能である。この場合、図1に示したシステム構成におけるデータレコーダ30や数値解析用コンピュータ40は、それら複数組で共用することができる。
【0044】
例えば自動車の例で言えば、図3に示した設置部位の他に、例えば図7に示すように、フロントサイドメンバ100の先端部に取付治具(図示省略)を介してPSDユニット20を取り付け、クロスメンバ下部に取付治具を介して前記ユニット20と光学系を共用するようにレーザ変位計10のペアを取り付けることで、フロントサイドメンバの変形計測も可能になる。この他、自動車で言えば、左右のフロントサイドメンバに対して一方にレーザ変位計10ペア、他方にPSDユニット20を取り付けることで、それら相互間の相対変形の計測を行うこともできる。また、リア側でも上記フロント側と同様の各部位についての相対変形を求めることができる。
【0045】
また、以上の例では、1対のレーザ変位計10と1対のPSD24を用いることで合計5軸(L,W,H方向の各変位、及びH軸回り、L軸回りの各ねじれ角)についての同時計測を行ったが、さらにレーザ変位計10とPSD24の1ずつ増やすことで、W軸回りのねじれ角が計測できるようにすることもできる。この場合3つのPSD24は、一直線に並ばなければよい。例えば図8のように、3つのPSD24(及びその前に設けられるビームスプリッタ22)を正三角形状に並べたPSDユニット60などが考えられる。なお当然ながら、これに対応する3つのレーザ変位計10は、それぞれ対応するPSD24に対して光学系を共用できる配置で、対象部位に対して取り付ける必要がある。このように3対のPSD−レーザ変位計を用いることで、合計6軸についての相対変形を計測できる。
【図面の簡単な説明】
【図1】 実施形態のシステムの概略構成を示す図である。
【図2】 PSDユニットの構成を説明するための図である。
【図3】 実施形態のシステムの取付構成例を示した図である。
【図4】 実施形態のシステムによる相対変形の計算原理を説明するための図である。
【図5】 実施形態のシステムによる相対変形の計算原理を説明するための図である。
【図6】 実施形態のシステムを用いた実験で求められた各軸方向の変形(変位量)の時間変化の例を示す図である。
【図7】 実施形態のシステムの別の取付構成例を示した図である。
【図8】 実施形態の変形としての、6軸計測用のPSDユニットの構成例を示す図である。
【符号の説明】
10 レーザ変位計、20 PSDユニット、22 ビームスプリッタ、24PSD、25 PSDユニットコントローラ、30 データレコーダ、40 数値解析用コンピュータ。
Claims (4)
- 変形計測対象物の第1の部位に取り付けられ、複数の測定光ビームを出力する手段と、
前記変形計測対象物の第2の部位に取り付けられ、前記各測定光ビーム毎にその二次元の受光位置を検出する手段と、
前記各測定光ビームの二次元の受光位置に基づき、前記第1の部位と前記第2の部位の相対変形を計算する手段と、
を備える変形計測システム。 - 変形計測対象物の第1の部位に対し相対的に固定状態となるよう取り付けられる変位計測装置であって、複数の測定光ビームを出力してその各々の反射光を受光し、それら各測定光ビーム毎にその反射光の反射位置までの距離を計測する変位計測装置と、
変形計測対象物の第2の部位に対し相対的に固定状態となるよう取り付けられる受光位置検出装置であって、前記変位計測装置からの各測定光ビームを受光して各々の二次元の受光位置を検出する位置検出手段と、それら各測定光ビームを前記変位計測装置へと反射する反射手段と、を備えた受光位置検出装置と、
前記変位計測装置で求められた前記各測定光ビーム毎の反射位置までの距離と、前記受光位置検出装置で求められる前記各測定光ビームの二次元の受光位置と、に基づいて前記第1の部位と前記第2の部位との間の相対変形を計算する変形演算装置と、
を備える変形計測システム。 - 前記反射手段は、前記位置検出手段の前面側に設けられ、入射する前記各測定光ビームの一部を前記変位計測装置に対して反射すると共に、別の一部を前記位置検出手段へと導くビームスプリッタであることを特徴とする請求項2記載の変形計測システム。
- 複数の測定光ビームを出力してその各々の反射光を受光し、それら各測定光ビーム毎にその反射光の反射位置までの距離を計測する変位計測装置を、変形計測対象物の第1の部位に対し相対的に固定状態となるよう取り付け、
前記変位計測装置からの各測定光ビームを受光して各々の二次元の受光位置を検出する位置検出手段と、それら各測定光ビームを前記変位計測装置へと反射する反射手段と、を備えた受光位置検出装置を、前記変形計測対象物の第2の部位に対し相対的に固定状態となるよう取り付け、
前記変位計測装置で求められた前記各測定ビーム毎の反射位置までの距離と、前記受光位置検出装置で求められる前記各測定光ビームの二次元の受光位置と、に基づいて前記第1の部位と前記第2の部位との間の相対変形を計算する、
変形計測方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2001159040A JP4333055B2 (ja) | 2001-05-28 | 2001-05-28 | 変形計測システム及び方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2001159040A JP4333055B2 (ja) | 2001-05-28 | 2001-05-28 | 変形計測システム及び方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2002350115A JP2002350115A (ja) | 2002-12-04 |
| JP4333055B2 true JP4333055B2 (ja) | 2009-09-16 |
Family
ID=19002682
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2001159040A Expired - Fee Related JP4333055B2 (ja) | 2001-05-28 | 2001-05-28 | 変形計測システム及び方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4333055B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN109612399A (zh) * | 2018-09-26 | 2019-04-12 | 中铁第勘察设计院集团有限公司 | 基于psd和激光测距的位移形变测量装置及方法 |
Families Citing this family (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN107655420A (zh) * | 2017-11-14 | 2018-02-02 | 云南省建筑科学研究院 | 一种在建隧道围岩变形自动监测装置 |
| CN109099841B (zh) * | 2018-09-14 | 2020-01-31 | 中国科学院长春光学精密机械与物理研究所 | 一种位置测量传感器和位置测量系统 |
| CN111707211B (zh) * | 2019-03-18 | 2022-03-29 | 江苏理工学院 | 汽车复合材料模压成形件的圆度及圆柱度测量装置 |
| CN111707213B (zh) * | 2019-03-18 | 2022-04-19 | 江苏理工学院 | 汽车复合材料模压成形件的圆柱度测量方法 |
| CN111707209B (zh) * | 2019-03-18 | 2022-04-19 | 江苏理工学院 | 汽车复合材料模压成形件的圆度测量方法 |
| CN111707212B (zh) * | 2019-03-18 | 2022-03-29 | 江苏理工学院 | 汽车复合材料模压成形件的线轮廓度测量方法及装置 |
| CN111707214B (zh) * | 2019-03-18 | 2022-03-29 | 江苏理工学院 | 汽车复合材料模压成形件的线轮廓度测量装置及方法 |
| CN111707210B (zh) * | 2019-03-18 | 2022-04-19 | 江苏理工学院 | 测量汽车复合材料模压成形件的圆度及圆柱度的装置 |
| CN113108708A (zh) * | 2021-03-30 | 2021-07-13 | 上海利正卫星应用技术有限公司 | 基于psd位置敏感器在太阳帆板变形测试系统及方法 |
| CN115164756B (zh) * | 2022-06-29 | 2023-11-03 | 上海市安装工程集团有限公司 | 支吊架变形量智能监测系统及方法 |
| CN119268642B (zh) * | 2024-12-06 | 2025-02-18 | 靖江市永固汽配制造有限公司 | 一种汽车后纵梁集成结构件形变检测设备 |
-
2001
- 2001-05-28 JP JP2001159040A patent/JP4333055B2/ja not_active Expired - Fee Related
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN109612399A (zh) * | 2018-09-26 | 2019-04-12 | 中铁第勘察设计院集团有限公司 | 基于psd和激光测距的位移形变测量装置及方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2002350115A (ja) | 2002-12-04 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US12467747B2 (en) | Wheel aligner with improved accuracy and no-stop positioning using a drive direction calculation | |
| JP4559681B2 (ja) | 自動車のホイールジオメトリ及び/又は軸線ジオメトリを規定する装置 | |
| US20210387637A1 (en) | Apparatus and method for calibrating and aligning automotive sensors | |
| US7952728B2 (en) | Robot-controlled optical measurement array, and method and auxiliary mechanism for calibrating said measurement array | |
| US6460004B2 (en) | Method and apparatus for calibrating a non-contact gauging sensor with respect to an external coordinate system | |
| JP4333055B2 (ja) | 変形計測システム及び方法 | |
| EP1295086B1 (en) | Glint-resistant position determination system | |
| US8448342B2 (en) | Unit of at least two target arrangements for optically measuring an axle and device for optically measuring an axle | |
| US20110100107A1 (en) | Method and device for wheel suspension alignment | |
| US7535558B2 (en) | Method for optical chassis measurement | |
| JP4567268B2 (ja) | 試験台上で車両の動的挙動を測定する方法 | |
| EP1091186A2 (en) | Method and apparatus for calibrating a non-contact gauging sensor with respect to an external coordinate system | |
| KR101337938B1 (ko) | 레이저 변위센서를 이용한 비접촉식 각도 측정 장치 및 방법, 그리고 이를 이용한 차량 사이드 미러의 비접촉식 진동 측정 방법 | |
| JPH09133510A (ja) | ホイールアライメント測定方法 | |
| JP2003121121A (ja) | 変形計測装置及び方法 | |
| JP7200780B2 (ja) | 情報処理装置、情報処理方法、及び情報処理システム | |
| JPH1089957A (ja) | 構造部材の三次元計測方法 | |
| JP3918732B2 (ja) | 非接触式三次元相対変位計測装置 | |
| CN111678451B (zh) | 运载体的变形测量方法、装置以及存储介质 | |
| CN221174968U (zh) | 一种车载多激光雷达标定装置及系统 | |
| JP2003097915A (ja) | 車輪挙動計測装置及び当該システム、並びに車輪状態解析装置 | |
| JPH11337328A (ja) | 路面測定装置 | |
| JP2000205815A (ja) | 3次元変位検出装置、ホイ―ルアラインメント測定装置、および3次元変位検出方法 | |
| ES2221877T3 (es) | Metodo y dispositivo para detectar la posicion de una rueda de vehiculo en un sistema de referencia ligado al vehiculo. | |
| JPH0829164A (ja) | 路面形状測定装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20070306 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20090303 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20090310 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20090511 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20090511 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20090602 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20090615 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120703 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120703 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130703 Year of fee payment: 4 |
|
| LAPS | Cancellation because of no payment of annual fees |