JP4367180B2 - 車両用運転操作補助装置および車両用運転操作補助装置を備える車両 - Google Patents
車両用運転操作補助装置および車両用運転操作補助装置を備える車両 Download PDFInfo
- Publication number
- JP4367180B2 JP4367180B2 JP2004059018A JP2004059018A JP4367180B2 JP 4367180 B2 JP4367180 B2 JP 4367180B2 JP 2004059018 A JP2004059018 A JP 2004059018A JP 2004059018 A JP2004059018 A JP 2004059018A JP 4367180 B2 JP4367180 B2 JP 4367180B2
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- risk potential
- reaction
- learning
- driver
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images










Landscapes
- Control Of Vehicle Engines Or Engines For Specific Uses (AREA)
- Auxiliary Drives, Propulsion Controls, And Safety Devices (AREA)
- Controls For Constant Speed Travelling (AREA)
Description
図1は、本発明の第1の実施の形態による車両用運転操作補助装置1の構成を示すシステム図であり、図2は、車両用運転操作補助装置1を搭載する車両の構成図である。
自車両周囲のリスクポテンシャルに応じてアクセルペダル反力制御を行うことにより、先行車に対する接近状態をアクセルペダル82の操作反力として運転者に伝達することができる。ただし、同一のリスクポテンシャル、すなわち先行車への接近状態に対するリスク感覚は人によって異なるため、同一のリスクポテンシャルに対して同一のアクセルペダル反力を発生しても、ドライバによっては反力の大きさや発生タイミングに対して違和感を覚える場合がある。
TTC=−d/vr ・・・(式1)
THW=d/v1 ・・・(式2)
RP=a/THW+b/TTC ・・・(式3)
ここで、a、bは、車間時間THWおよび余裕時間TTCにそれぞれ適切な重み付けをするための定数であり、予め適切な値を設定しておく。定数a、bは、例えばa=1,b=8(a<b)に設定する。
(1)コントローラ50は、自車両周囲の走行状況に基づいてリスクポテンシャルRPを算出し、リスクポテンシャルRPに応じて操作反力制御を行う。さらに、ドライバが自身のリスク感覚に反応して所定の運転動作を行うとき、すなわち所定の反応動作時における車両状態を学習し、学習した車両状態に基づいてリスクポテンシャル式を補正する。具体的には、ドライバの所定の反応動作時における車両状態を学習することにより、ドライバの個人差を学習し、図9に示すようなRP−ΔF特性を補正する。これにより、個人のリスク感覚に合った操作反力制御を行うことができる。
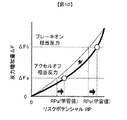
(2)コントローラ50は、ドライバの所定の反応動作時における車両状態として、リスクポテンシャルPRを学習する。そして、学習した反応動作時のリスクポテンシャルRPが大きいほど、走行状況に基づいて算出するリスクポテンシャルRPが小さくなるように、リスクポテンシャル式を補正する。すなわち、所定の反応動作時のリスクポテンシャルRPが常に大きい傾向にあるドライバに対しては、リスクポテンシャルRPが小さくなる方向に補正する。具体的には、反応動作時のリスクポテンシャルRPa、RPbが大きいほど、図10に示すようにリスクポテンシャルRPに対する反力増加量ΔFが減少する方向にRP−ΔF特性を補正する。これにより、個人のリスク感覚に合わせて所定の反応動作時には同一の操作反力を発生させることができる。
(3)コントローラ50は、学習の対象データとする車両状態、すなわちリスクポテンシャルRPを、反応動作についてのドライバの反応または自車両の挙動に基づいて選択する。同一の反応動作を行う際でも、ドライバの反応または自車両の挙動はそれぞれのケースによって異なる。そこで、学習対象のデータをドライバの反応または自車両の挙動に基づいて選択することにより、ドライバの個人差を精度よく学習することができる。
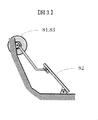
(4)コントローラ50は、所定の反応動作時における車両状態として、アクセルペダル解放時のリスクポテンシャルRPaを学習する。このとき、ドライバの反応または自車両の挙動として、ドライバがアクセルペダル82を解放してからブレーキペダル92を踏み込むまでの踏み換え時間RTを用いる。踏み換え時間RTはドライバのリスク感覚を表すファクターの一つであり、踏み換え時間RTを用いて学習対象のデータを選択することにより、ドライバの個人差を精度よく学習することができる。
(5)踏み換え時間RTが所定値よりも小さい、すなわち緊急度RU1(RU1=1/RT)が所定値RU10よりも大きい場合のリスクポテンシャルRPを学習対象のデータとして選択するので、学習データのばらつきを少なくしてドライバの個人差を精度よく学習することができる。
(6)コントローラ50は、所定の反応動作時における車両状態として、アクセルペダル82を解放した後、ブレーキペダル92を踏み込む時のリスクポテンシャルRPbを学習する。このとき、ドライバの反応または自車両の挙動として、ブレーキペダル92の踏み込みによる自車両の減速度合を用いる。自車両の減速度合はドライバのリスク感覚を表すファクターの一つであり、減速度合を用いて学習対象のデータを選択することにより、ドライバの個人差を精度よく学習することができる。
(5)減速度合に基づく緊急度RU2が所定値RU20よりも大きい場合のリスクポテンシャルRPを学習対象のデータとして選択するので、学習データのばらつきを少なくしてドライバの個人差を精度よく学習することができる。
以下に、本発明の第2の実施の形態による車両用運転操作補助装置について説明する。第2の実施の形態による車両用運転操作補助装置の構成は、図1および図2に示した第1の実施の形態と同様である。ここでは、上述した第1の実施の形態との相違点を主に説明する。
(1)コントローラ50は、所定の反応動作についてのドライバの反応または自車両の挙動に基づいて、学習する車両状態を補正する。具体的には、図12に示すように所定の反応動作時に得られるリスクポテンシャルデータを補正することにより、リスクポテンシャル学習値RPa、RPbを算出(推定)する。これにより、ドライバの個人差を精度よく学習することができる。
(2)コントローラ50は、アクセルペダル82を解放してからブレーキペダル92を踏み込むまでの踏み換え時間RTに基づく緊急度RU1に応じて、アクセルペダル解放時に得られるリスクポテンシャルデータを補正し、ドライバのアクセルペダル解放時のリスクポテンシャルRPaを学習する。これにより、アクセルペダル82を解放するときのドライバのリスク感覚に関する個人差を精度よく学習することができる。
(3)コントローラ50は、アクセルペダル82を解放した後、ブレーキペダル92を踏み込んだ時の自車両の減速度合に基づく緊急度RU2に応じて、ブレーキペダル踏み込み時に得られるリスクポテンシャルデータを補正し、ドライバのブレーキペダル踏み込み時のリスクポテンシャルRPbを学習する。これにより、ブレーキペダル92を踏み込むときのドライバのリスク感覚に関する個人差を精度よく学習することができる。
30:車速センサ
50:コントローラ
80:アクセルペダル反力制御装置
82:アクセルペダル
84:アクセルオフスイッチ
94:ブレーキオンスイッチ
Claims (7)
- 自車両周囲の走行状況を検出する状況認識手段と、
前記状況認識手段の検出結果に基づいて、自車両周囲のリスクポテンシャルを算出するリスクポテンシャル算出手段と、
前記リスクポテンシャル算出手段によって算出される前記リスクポテンシャルに基づいて、運転操作装置に発生する操作反力を制御する操作反力制御手段と、
ドライバの所定の反応動作時における車両状態を学習する反応学習手段と、
前記反応学習手段によって学習された前記車両状態に基づいて、前記リスクポテンシャル算出手段におけるリスクポテンシャル式を補正する補正手段と、
前記反応学習手段における学習の対象データとする前記車両状態を、前記反応動作についての前記ドライバの反応または前記自車両の挙動に基づいて選択する学習データ選択手段とを備えることを特徴とする車両用運転操作補助装置。 - 請求項1に記載の車両用運転操作補助装置において、
前記反応学習手段は、前記車両状態として、前記反応動作時の前記リスクポテンシャルを学習し、
前記補正手段は、前記反応学習手段によって学習した前記反応動作時の前記リスクポテンシャルが大きいほど、前記リスクポテンシャル算出手段で算出する前記リスクポテンシャルが小さくなるように前記リスクポテンシャル式を補正することを特徴とする車両用運転操作補助装置。 - 請求項1または請求項2に記載の車両用運転操作補助装置において、
前記反応学習手段は、前記所定の反応動作時における前記車両状態として、アクセルペダル解放時の前記車両状態を学習し、
前記学習データ選択手段は、前記ドライバの反応または前記自車両の挙動として、アクセルペダルを解放してからブレーキペダルを踏み込むまでの踏み換え時間を用いることを特徴とする車両用運転操作補助装置。 - 請求項3に記載の車両用運転操作補助装置において、
前記学習データ選択手段は、前記踏み換え時間が所定値よりも小さい場合の前記車両状態を、前記学習の対象データとして選択することを特徴とする車両用運転操作補助装置。 - 請求項1または請求項2に記載の車両用運転操作補助装置において、
前記反応学習手段は、前記所定の反応動作時における前記車両状態として、アクセルペダルを解放した後のブレーキペダル踏み込み時の前記車両状態を学習し、
前記学習データ選択手段は、前記ドライバの反応または前記自車両の挙動として、ブレーキペダルの踏み込みによる前記自車両の減速度合を用いることを特徴とする車両用運転操作補助装置。 - 請求項5に記載の車両用運転操作補助装置において、
前記学習データ選択手段は、前記減速度合が所定値よりも大きい場合の前記車両状態を、前記学習の対象データとして選択することを特徴とする車両用運転操作補助装置。 - 請求項1から請求項6のいずれか1項に記載の車両用運転操作補助装置を備えることを特徴とする車両。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004059018A JP4367180B2 (ja) | 2004-03-03 | 2004-03-03 | 車両用運転操作補助装置および車両用運転操作補助装置を備える車両 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004059018A JP4367180B2 (ja) | 2004-03-03 | 2004-03-03 | 車両用運転操作補助装置および車両用運転操作補助装置を備える車両 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2005247098A JP2005247098A (ja) | 2005-09-15 |
| JP4367180B2 true JP4367180B2 (ja) | 2009-11-18 |
Family
ID=35028009
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004059018A Expired - Fee Related JP4367180B2 (ja) | 2004-03-03 | 2004-03-03 | 車両用運転操作補助装置および車両用運転操作補助装置を備える車両 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4367180B2 (ja) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5185554B2 (ja) * | 2007-03-23 | 2013-04-17 | 富士重工業株式会社 | オンラインリスク学習システム |
| DE102009054650A1 (de) * | 2009-12-15 | 2011-06-16 | Continental Engineering Services Gmbh | Vorrichtung zur Erzeugung einer zusätzlichen Rückstellkraft am Gaspedal und Verfahren zu deren Betrieb |
| JP7597541B2 (ja) * | 2020-09-25 | 2024-12-10 | 株式会社Subaru | 運転支援制御装置 |
-
2004
- 2004-03-03 JP JP2004059018A patent/JP4367180B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2005247098A (ja) | 2005-09-15 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP3873876B2 (ja) | 車両用運転操作補助装置およびその装置を備えた車両 | |
| JP4229051B2 (ja) | 運転意図推定装置、車両用運転操作補助装置および車両用運転操作補助装置を備えた車両 | |
| JP3838166B2 (ja) | 車両用運転操作補助装置 | |
| JP4226455B2 (ja) | 運転意図推定装置、車両用運転操作補助装置および車両用運転操作補助装置を備えた車両 | |
| JP4367319B2 (ja) | 車両用運転操作補助装置および車両用運転操作補助装置を備えた車両 | |
| JP4561092B2 (ja) | 車両用運転操作補助装置および車両用運転操作補助装置を備えた車両 | |
| JP4367254B2 (ja) | 車両用運転操作補助装置および車両用運転操作補助装置を備えた車両 | |
| JP4740684B2 (ja) | 車両用運転操作補助装置および車両用運転操作補助装置を備えた車両 | |
| JP4114470B2 (ja) | 車両用運転操作補助装置およびその装置を備えた車両 | |
| JP4367180B2 (ja) | 車両用運転操作補助装置および車両用運転操作補助装置を備える車両 | |
| JP4055721B2 (ja) | 車両用運転操作補助装置および車両用運転操作補助装置を備えた車両 | |
| JP4483837B2 (ja) | 車両用運転操作補助装置およびその装置を備えた車両 | |
| JP3903913B2 (ja) | 車両用運転操作補助装置およびその装置を備えた車両 | |
| JP2005174218A (ja) | 車両用運転支援装置 | |
| JP2006213276A (ja) | 運転意図推定装置、車両用運転操作補助装置および車両用運転操作補助装置を備えた車両 | |
| JP4622465B2 (ja) | 車両用運転操作補助装置および車両用運転操作補助装置を備えた車両 | |
| JP4063283B2 (ja) | 車両用運転操作補助装置および車両用運転操作補助装置を備えた車両 | |
| JP4947134B2 (ja) | 操作補助方法、操作補助装置、制御プログラム、および車両 | |
| JP2005008147A (ja) | 車両用運転操作補助装置 | |
| JP4124030B2 (ja) | 車両用運転操作補助装置および車両用運転操作補助装置を備えた車両 | |
| JP4079074B2 (ja) | 車両用運転操作補助装置および車両用運転操作補助装置を備える車両 | |
| JP4483827B2 (ja) | 車両用運転操作補助装置 | |
| JP6587803B2 (ja) | 車両用走行制御装置及び車両用走行制御方法 | |
| JP4927056B2 (ja) | 運転意図推定装置、車両用運転操作補助装置および車両用運転操作補助装置を備えた車両 | |
| JP4674465B2 (ja) | 車両用運転操作補助装置および車両用運転操作補助装置を備えた車両 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20070129 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20090421 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20090423 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20090612 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20090804 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20090817 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120904 Year of fee payment: 3 |
|
| LAPS | Cancellation because of no payment of annual fees |