以下、本発明の実施の形態につき、図面を参照して具体的に説明する。参照される各図において、同一の部分には同一の符号を付し、同一の部分に関する重複する説明を原則として省略する。
<<第1実施形態>>
まず、本発明の第1実施形態について説明する。後に、第1実施形態における第1〜第5実施例を説明するが、まず、それらの各実施例に共通する事項及び各実施例にて参照される事項について説明する。図1は、第1実施形態に係るモータ駆動システムのブロック構成図である。
図1のモータ駆動システムは、三相永久磁石同期モータ1(以下、単に「モータ1」と記す)と、PWM(Pulse Width Modulation)インバータ2(以下、単に「インバータ2」という)と、制御部3と、直流電源4と、電流センサ5と、を備える。直流電源4は、負出力端子4bを低電圧側として、正出力端子4aと負出力端子4bとの間に直流電圧を出力する。図1のモータ駆動システムは、1シャント電流検出方式を採用している。
モータ1は、永久磁石が設けられた回転子6と、U相、V相及びW相の電機子巻線7u、7v及び7wが設けられた固定子7と、を備えている。電機子巻線7u、7v及び7wは、中性点14を中心にY結線されている。電機子巻線7u、7v及び7wにおいて、中性点14の反対側の非結線端は、夫々、端子12u、12v及び12wに接続されている。
インバータ2は、U相用のハーフブリッジ回路、V相用のハーフブリッジ回路及びW相用のハーフブリッジ回路を備える。各ハーフブリッジ回路は、一対のスイッチング素子を有する。各ハーフブリッジ回路において、一対のスイッチング素子は、直流電源4の正出力端子4aと負出力端子4bとの間に直列接続され、各ハーフブリッジ回路に直流電源4からの直流電圧が印加される。
U相用のハーフブリッジ回路は、高電圧側のスイッチング素子8u(以下、上アーム8uとも呼ぶ)及び低電圧側のスイッチング素子9u(以下、下アーム9uとも呼ぶ)から成る。V相用のハーフブリッジ回路は、高電圧側のスイッチング素子8v(以下、上アーム8vとも呼ぶ)及び低電圧側のスイッチング素子9v(以下、下アーム9vとも呼ぶ)から成る。W相用のハーフブリッジ回路は、高電圧側のスイッチング素子8w(以下、上アーム8wとも呼ぶ)及び低電圧側のスイッチング素子9w(以下、下アーム9wとも呼ぶ)から成る。また、スイッチング素子8u、8v、8w、9u、9v及び9wには、夫々、並列に、直流電源4の低電圧側から高電圧側に向かう方向を順方向としてダイオード10u、10v、10w、11u、11v及び11wが接続されている。各ダイオードは、フリーホイールダイオードとして機能する。
直列接続された上アーム8uと下アーム9uの接続点、直列接続された上アーム8vと下アーム9vの接続点、直列接続された上アーム8wと下アーム9wの接続点は、夫々、端子12u、12v及び12wに接続される。尚、図1では、各スイッチング素子として電界効果トランジスタが示されているが、それらをIGBT(絶縁ゲートバイポーラトランジスタ)などに置き換えることもできる。
インバータ2は、制御部3から与えられた三相電圧指令値に基づいて各相に対するPWM信号(パルス幅変調信号)を生成し、該PWM信号をインバータ2内の各スイッチング素子の制御端子(ベース又はゲート)に与えることで、各スイッチング素子をスイッチング動作させる。制御部3からインバータ2に供給される三相電圧指令値は、U相電圧指令値vu *、V相電圧指令値vv *及びW相電圧指令値vw *から構成され、vu *、vv *及びvw *によって、夫々、U相電圧vu、V相電圧vv及びW相電圧vwの電圧レベル(電圧値)が表される。そして、インバータ2は、vu *、vv *及びvw *に基づいて、各スイッチング素子のオン(導通)又はオフ(非導通)を制御する。
同一の相の上アームと下アームが同時にオンとなるのを防ぐためのデッドタイムを無視すると、各ハーフブリッジ回路において、上アームがオンである時は下アームはオフであり、上アームがオフである時は下アームはオンである。以下の説明は、上記デッドタイムを無視して行うものとする。
インバータ2に印加されている直流電源4からの直流電圧は、インバータ2内の各スイッチング素子のスイッチング動作によって、例えば、PWM変調(パルス幅変調)された三相交流電圧に変換される。該三相交流電圧がモータ1に印加されることによって、各電機子巻線(7u、7v及び7w)に、三相交流電圧に応じた電流が流れてモータ1が駆動される。
電流センサ5は、インバータ2の母線13に流れる電流(以下、「母線電流」という)を検出する。母線電流は直流成分を有するため、それを直流電流と解釈することもできる。インバータ2において、下アーム9u、9v及び9wの低電圧側は共通結線されて直流電源4の負出力端子4bに接続される。下アーム9u、9v及び9wの低電圧側が共通結線される配線が母線13であり、電流センサ5は、母線13に直列に介在している。電流センサ5は、検出した母線電流(検出電流)の電流値を表す信号を制御部3に伝達する。制御部3は、電流センサ5の出力信号等を参照しつつ上記三相電圧指令値を生成及び出力する。尚、電流センサ5は、例えば、シャント抵抗又はカレントトランス等である。また、下アーム9u、9v及び9wの低電圧側と負出力端子4bとを接続する配線(母線13)にではなく、上アーム8u、8v及び8wの高電圧側と正出力端子4aとを接続する配線に電流センサ5を設けるようにしてもよい。
ここで、図2〜図6を用いて、母線電流と各相の電機子巻線に流れる相電流との関係等について説明する。電機子巻線7u、7v及び7wに流れる電流を、夫々、U相電流、V相電流及びW相電流と呼び、それらの夫々を(或いはそれらを総称して)相電流と呼ぶ(図1参照)。また、相電流において、端子12u、12v又は12wから中性点14に流れ込む方向の電流の極性を正とし、中性点14から流れ出す方向の電流の極性を負とする。
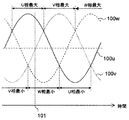
図2は、モータ1に印加される三相交流電圧の典型的な例を示す。図2において、100u、100v及び100wは、夫々、モータ1に印加されるべきU相電圧、V相電圧及びW相電圧の波形を表す。U相電圧、V相電圧及びW相電圧の夫々を(或いはそれらを総称して)相電圧と呼ぶ。モータ1に正弦波状の電流を流す場合、インバータ2の出力電圧は正弦波状とされる。尚、図2の各相電圧は理想的な正弦波となっているが、本実施形態において、実際には該正弦波に歪みが加えられる(詳細は後述)。
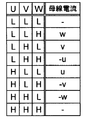
図2に示す如く、U相電圧、V相電圧及びW相電圧の間の電圧レベルの高低関係は、時間の経過と共に変化していく。この高低関係は三相電圧指令値によって定まり、インバータ2は三相電圧指令値に従って各相に対する通電パターンを決定する。図3に、この通電パターンを表として示す。図3の左側から第1列目〜第3列目に通電パターンを表す。第4列目については後述する。
通電パターンには、
U、V及びW相の下アームが全てオンの通電パターン「LLL」と、
W相の上アームがオン且つU及びV相の下アームがオンの通電パターン「LLH」と、
V相の上アームがオン且つU及びW相の下アームがオンの通電パターン「LHL」と、
V及びW相の上アームがオン且つU相の下アームがオンの通電パターン「LHH」と、
U相の上アームがオン且つV及びW相の下アームがオンの通電パターン「HLL」と、
U及びW相の上アームがオン且つV相の下アームがオンの通電パターン「HLH」と、
U及びV相の上アームがオン且つW相の下アームがオンの通電パターン「HHL」と、
U、V及びW相の上アームが全てオンの通電パターン「HHH」と、
がある(上アーム及び下アームの符号(8u等)を省略して記載)。
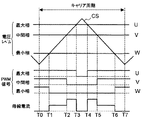
図4に、3相変調を行う場合における、各相電圧の電圧レベルとキャリア信号との関係、並びに、その関係に応じたPWM信号及び母線電流の波形を示す。各相電圧の電圧レベルの高低関係は様々に変化するが、説明の具体化のため、図4は、図2に示す或るタイミング101に着目している。即ち、図4は、U相電圧の電圧レベルが最大であって且つW相電圧の電圧レベルが最小である場合を示している。電圧レベルが最大の相を「最大相」、電圧レベルが最小の相を「最小相」、電圧レベルが最大でも最小でもない相を「中間相」と呼ぶ。図4に示す状態では、最大相、中間相及び最小相は、夫々、U相、V相及びW相となっている。図4において、符号CSは各相電圧の電圧レベルと比較されるキャリア信号を表す。キャリア信号は周期的な三角波信号となっており、その信号の周期をキャリア周期という。尚、キャリア周期は、図2に示す三相交流電圧の周期よりも遥かに短いため、仮に図4に示すキャリア信号の三角波を図2上で表すと、その三角波は1本の線となって見える。
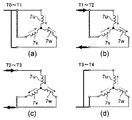
図5(a)〜(d)を更に参照して相電流と母線電流との関係について説明する。図5は、図4の各タイミングにおける、電機子巻線周辺の等価回路である。
各キャリア周期の開始タイミング、即ちキャリア信号が最低レベルにあるタイミングをT0と呼ぶ。タイミングT0において、各相の上アーム(8u、8v及び8w)はオンとされる。この場合、図5(a)に示す如く、短絡回路が形成されて直流電源4への電流の出入りがない状態となるため、母線電流はゼロとなる。
インバータ2は、vu *、vv *及びvw *を参照して各相電圧の電圧レベルとキャリア信号を比較する。そして、キャリア信号のレベル(電圧レベル)の上昇過程において、最小相の電圧レベルがキャリア信号と交差するタイミングT1に至ると、最小相の下アームがオンとされ、図5(b)に示す如く、最小相の電流が母線電流として流れる。図4に示す例の場合、タイミングT1から後述のタイミングT2に至るまでの間は、W相の下アーム9wがオンとなるため、W相電流(極性は負)が母線電流として流れる。
更にキャリア信号のレベルが上昇して中間相の電圧レベルがキャリア信号と交差するタイミングT2に至ると、最大相の上アームがオン且つ中間相及び最小相の下アームがオンとなって、図5(c)に示す如く、最大相の電流が母線電流として流れる。図4に示す例の場合、タイミングT2から後述のタイミングT3に至るまでの間は、U相の上アーム8uがオン且つV相及びW相の下アーム9v及び9wがオンとなるため、U相電流(極性は正)が母線電流として流れる。
更にキャリア信号のレベルが上昇して最大相の電圧レベルがキャリア信号と交差するタイミングT3に至ると、全ての相の下アームがオンとなって、図5(d)に示す如く、短絡回路が形成されて直流電源4への電流の出入りがない状態となるため、母線電流はゼロとなる。
タイミングT3と後述するタイミングT4の中間タイミングにおいて、キャリア信号が最大レベルに達した後、キャリア信号のレベルは下降していく。キャリア信号のレベルの下降過程では、図5(d)、(c)、(b)及び(a)に示す状態が、この順番で訪れる。即ち、キャリア信号のレベルの下降過程において、最大相の電圧レベルがキャリア信号と交差するタイミングをT4、中間相の電圧レベルがキャリア信号と交差するタイミングをT5、最小相の電圧レベルがキャリア信号と交差するタイミングをT6、次のキャリア周期の開始タイミングをT7とすると、タイミングT4−T5間、タイミングT5−T6間、タイミングT6−T7間は、夫々、タイミングT2−T3間、タイミングT1−T2間、タイミングT0−T1間と同じ通電パターンとなる。
従って例えば、タイミングT1−T2間或いはT5−T6間で母線電流を検出すれば、母線電流から最小相の電流を検出することができ、タイミングT2−T3間或いはT4−T5間で母線電流を検出すれば、母線電流から最大相の電流を検出することができる。そして、中間相の電流は、三相電流の総和が0になることを利用して計算で得ることができる。図3の表の第4列目には、各通電パターンにおいて母線電流として流れる電流の相を、電流極性付きで示している。例えば、図3の表の8行目に対応する通電パターン「HHL」においては、母線電流としてW相電流(極性は負)が流れる。
尚、キャリア周期からタイミングT1とT6との間の期間を除いた期間は最小相に対するPWM信号のパルス幅を表し、キャリア周期からタイミングT2とT5との間の期間を除いた期間は中間相に対するPWM信号のパルス幅を表し、キャリア周期からタイミングT3とT4との間の期間を除いた期間は最大相に対するPWM信号のパルス幅を表す。
U相が最大相且つW相が最小相の場合を例に挙げたが、最大相、中間相及び最小相の組み合わせは、6通りある。図6に、この組み合わせを表として示す。U相電圧、V相電圧及びW相電圧を、夫々、vu、vv及びvwで表した場合において、
vu>vv>vw、が成立する状態を第1モード、
vv>vu>vw、が成立する状態を第2モード、
vv>vw>vu、が成立する状態を第3モード、
vw>vv>vu、が成立する状態を第4モード、
vw>vu>vv、が成立する状態を第5モード、
vu>vw>vv、が成立する状態を第6モード、
と呼ぶ。図4及び図5に示した例は、第1モードに対応している。また、図6には、各モードにおいて検出される電流の相も示されている。
U相電圧指令値vu *、V相電圧指令値vv *及びW相電圧指令値vw *は、具体的には、夫々、カウンタの設定値CntU、CntV及びCntWとして表される。相電圧が高いほど、大きな設定値が与えられる。例えば、第1モードにおいては、CntU>CntV>CntW、が成立する。
制御部3に設けられたカウンタ(不図示)は、キャリア周期ごとに、タイミングT0を基準としてカウント値を0からアップカウントする。そして、そのカウント値がCntWに達した時点でW相の上アーム8wがオンの状態から下アーム9wがオンの状態に切り替えられ、そのカウント値がCntVに達した時点でV相の上アーム8vがオンの状態から下アーム9vがオンの状態に切り替えられ、そのカウント値がCntUに達した時点でU相の上アーム8uがオンの状態から下アーム9uがオンの状態に切り替えられる。キャリア信号が最大レベルに達した後は、カウント値はダウンカウントされ、逆の切り替え動作が行われる。
従って、第1モードにおいては、上記のカウンタ値がCntWに達した時点がタイミングT1に対応し、CntVに達した時点がタイミングT2に対応し、CntUに達した時点がタイミングT3に対応することになる。このため、第1モードにおいては、カウンタ値がアップカウントされている状態で、カウンタ値がCntWより大きく且つCntVより小さいタイミングに電流センサ5の出力信号をサンプリングすることにより母線電流として流れるW相電流(極性は負)を検出することができ、カウンタ値がCntVより大きく且つCntUより小さいタイミングに電流センサ5の出力信号をサンプリングすることにより、母線電流として流れるU相電流(極性は正)を検出することができる。
同様に考えて、図6に示す如く、第2モードにおいては、上記のカウンタ値がCntWに達した時点がタイミングT1に対応し、CntUに達した時点がタイミングT2に対応し、CntVに達した時点がタイミングT3に対応することになる。このため、第2モードにおいては、カウンタ値がアップカウントされている状態で、カウンタ値がCntWより大きく且つCntUより小さいタイミングの母線電流からW相電流(極性は負)を検出することができ、カウンタ値がCntUより大きく且つCntVより小さいタイミングの母線電流からV相電流(極性は正)を検出することができる。第3〜第6モードについても同様である。
また、タイミングT1−T2間の、最小相の相電流を検出するサンプリングタイミング(例えば、タイミングT1とT2の中間タイミング)をST1にて表し、タイミングT2−T3間の、最大相の相電流を検出するサンプリングタイミング(例えば、タイミングT2とT3の中間タイミング)をST2にて表す。
尚、三相電圧指令値(vu *、vv *及びvw *)としてのカウンタの設定値CntU、CnuV及びCntWによって、各相に対するPWM信号のパルス幅(及びデューティ)は特定される。
上述の原理に基づき母線電流から各相電流を検出することができるのであるが、図4を参照して理解されるように、例えば最大相と中間相の電圧レベルが接近するとタイミングT2−T3間及びT4−T5間の時間長さが短くなる。母線電流は図1の電流センサ5からのアナログ出力信号をデジタル信号に変換することによって検出されるが、この時間長さが極端に短いと、必要なA/D変換時間やリンギング(スイッチングに由来して生じる電流脈動)の収束時間を確保できなくなって、最大相の相電流を検出できなくなる。同様に、最小相と中間相の電圧レベルが接近すると、最小相の相電流を検出できなくなる。2相分の電流を実測できなければ、3相分の相電流を再現することはできず、モータ1をベクトル制御することはできない。
本実施形態(後述する各実施例)では、このような2相分の電流を実測できなくなると考えられる期間において、モータ1への印加電圧を表す電圧ベクトル(電圧指令ベクトル)を補正して各相電圧間の電圧レベル差を所定値以上に保ち、これによって上記の不具合を解消する。
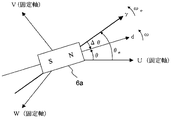
この補正手法の詳細な説明の前に、各種の状態量(状態変数)の説明及び定義等を行う。図7は、モータ1の解析モデル図である。図7には、U相、V相、W相の電機子巻線固定軸(以下、それらを、単に、U相軸、V相軸及びW相軸とも呼ぶ)が示されている。6aは、モータ1の回転子6に設けられた永久磁石である。永久磁石6aが作る磁束と同じ速度で回転する回転座標系において、永久磁石6aが作る磁束の方向をd軸にとる。また、図示していないが、d軸から電気角で90度進んだ位相にq軸をとる。
また、モータ1にベクトル制御を行うに際して回転子位置検出用の位置センサを用いない場合は、真のd軸及びq軸が不明であるため、制御上の推定軸が定義される。d軸に対応する制御上の推定軸をγ軸とし、q軸に対応する制御上の推定軸をδ軸とする。δ軸は、γ軸から電気角で90度進んだ軸である(図7において不図示)。通常、ベクトル制御は、γ軸及びδ軸がd軸及びq軸と一致するように実施される。d軸とq軸は、実軸の回転座標系の座標軸であり、それらを座標軸に選んだ座標をdq座標とよぶ。γ軸とδ軸は、制御上の回転座標系(推定回転座標系)の座標軸であり、それらを座標軸に選んだ座標をγδ座標とよぶ。
d軸(及びq軸)は回転しており、その回転速度(電気角速度)を実モータ速度ωと呼ぶ。γ軸(及びδ軸)も回転しており、その回転速度(電気角速度)を推定モータ速度ωeと呼ぶ。また、ある瞬間の回転しているdq座標において、d軸の位相をU相の電機子巻線固定軸を基準としてθ(実回転子位置θ)により表す。同様に、ある瞬間の回転しているγδ座標において、γ軸の位相をU相の電機子巻線固定軸を基準としてθe(推定回転子位置θe)により表す。そうすると、d軸とγ軸との軸誤差Δθは、Δθ=θ―θeで表される。
また、インバータ2からモータ1に印加される全体のモータ電圧をVaにて表し、インバータ2からモータ1に供給される全体のモータ電流をIaにて表す。そして、
モータ電圧Vaのγ軸成分、δ軸成分、d軸成分及びq軸成分を、それぞれγ軸電圧vγ、δ軸電圧vδ、d軸電圧vd及びq軸電圧vqで表し、
モータ電流Iaのγ軸成分、δ軸成分、d軸成分及びq軸成分を、それぞれγ軸電流iγ、δ軸電流iδ、d軸電流id及びq軸電流iqで表す。
また、後の各実施例でも参照されるが、γ軸電圧vγ、δ軸電圧vδ、d軸電圧vd及びq軸電圧vqに対する指令値(電圧指令値)を、夫々、γ軸電圧指令値vγ*、δ軸電圧指令値vδ*、d軸電圧指令値vd *及びq軸電圧指令値vq *にて表す。vγ*、vδ*、vd *及びvq *は、モータ駆動システム内において算出され、夫々、vγ、vδ、vd及びvqが追従すべき電圧(電圧値)を表す。
また更に、γ軸電流iγ、δ軸電流iδ、d軸電流id及びq軸電流iqに対する指令値(電流指令値)を、夫々、γ軸電流指令値iγ*、δ軸電流指令値iδ*、d軸電流指令値id *及びq軸電流指令値iq *にて表す。iγ*、iδ*、id *及びiq *は、モータ駆動システム内において算出され、夫々、iγ、iδ、id及びiqが追従すべき電流(電流値)を表す。
[補正手法について]
以下に、本実施形態の特徴的な機能である、電圧ベクトルの補正手法について説明する。
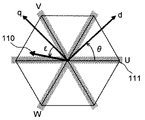
図8に、固定軸であるU相軸、V相軸及びW相軸と、回転軸であるd軸及びq軸と、電圧ベクトルと、の関係を表す空間ベクトル図を示す。符号110が付されたベクトルが、電圧ベクトルである。q軸から見た電圧ベクトル110の位相をεにて表す。U相軸を基準とした電圧ベクトル110の位相は、(θ+ε+π/2)にて表される。
電圧ベクトル110は、モータ1に印加される電圧をベクトルとして捉えたものであり、例えばdq座標に着目した場合、電圧ベクトル110のd軸成分及びq軸成分は、それぞれvd及びvqである。実際には、モータ駆動システム内においてd軸電圧指令値vd *及びq軸電圧指令値vq *が算出され、vd *及びvq *によって電圧ベクトル110が表される。このため、電圧ベクトルは、電圧指令ベクトルとも読み替えられる。
U相軸近傍、V相軸近傍及びW相軸近傍のハッチングが施されたアスタリスク状の領域111は、2相分の電流が検出できない領域を表している。例えば、V相電圧とW相電圧が近くて2相分の電流が検出できない場合、電圧ベクトル110はU相軸近傍に位置することになり、U相電圧とW相電圧が近くて2相分の電流が検出できない場合、電圧ベクトル110はV相軸近傍に位置することになる。
このように、2相分の電流が検出不可能な領域111は、U相軸を基準として電気角で60度ごとに存在し、電圧ベクトル110が、その領域111に位置すると2相分の電流が検出できない。従って、電圧ベクトルが領域111内にある場合に、電圧ベクトルが領域111外のベクトルとなるように電圧ベクトルを補正してやればよい。
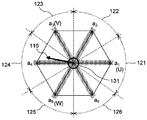
この補正を実行するべく、今、2相分の電流を検出不可能な領域111の特性に着目して、電気角60度ごとにステップ的に回転する座標を考える。この座標を、ab座標と呼ぶ(尚、dq座標やγδ座標は連続的に回転する座標である)。ab座標は、互いに直交するa軸とb軸を座標軸としている。図9に、a軸がとり得る6つの軸を示す。a軸は、電圧ベクトル110の位相(θ+ε+π/2)に応じて、a1軸〜a6軸の何れかとなる。a1軸、a3軸及びa5軸は、それぞれU相軸、V相軸及びW相軸に一致し、a2軸、a4軸及びa6軸は、それぞれa1軸とa3軸の中間軸、a3軸とa5軸の中間軸及びa5軸とa1軸の中間軸である。尚、符号131が付された円については後述する。
電圧ベクトル110が、符号121が付された範囲に位置する場合、即ち、
11π/6≦(θ+ε+π/2)<0、又は、0≦(θ+ε+π/2)<π/6、が成立する場合、a軸はa1軸となり、
電圧ベクトル110が、符号122が付された範囲に位置する場合、即ち、
π/6≦(θ+ε+π/2)<π/2、が成立する場合、a軸はa2軸となり
電圧ベクトル110が、符号123が付された範囲に位置する場合、即ち、
π/2≦(θ+ε+π/2)<5π/6、が成立する場合、a軸はa3軸となり
電圧ベクトル110が、符号124が付された範囲に位置する場合、即ち、
5π/6≦(θ+ε+π/2)<7π/6、が成立する場合、a軸はa4軸となり
電圧ベクトル110が、符号125が付された範囲に位置する場合、即ち、
7π/6≦(θ+ε+π/2)<3π/2、が成立する場合、a軸はa5軸となり
電圧ベクトル110が、符号126が付された範囲に位置する場合、即ち、
3π/2≦(θ+ε+π/2)<11π/6、が成立する場合、a軸はa6軸となる。
例えば、電圧ベクトル110が図9に示す位置にある場合、a軸はa4軸となる。
このように、a軸は、電圧ベクトルの回転に伴って、60度ごとにステップ的に回転し、b軸も、a軸と直交しつつa軸と共に60度ごとにステップ的に回転する。a軸及びb軸は60度ごとに量子化されて60度ごとに回転する座標軸である、とも表現できる。このため、a軸は、常に、2相分の電流を検出不可能な領域の中心に位置することになる。本補正手法では、dq座標上の電圧ベクトルをab座標上に変換し、そのab座標上に変換された電圧ベクトルのa軸成分及びb軸成分を参照して、必要に応じてそれらを補正する(例えば、補正によってb軸成分を大きくする)。
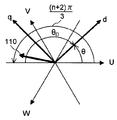
この補正処理のより具体的な実現方法について説明する。a1軸〜a6軸の内、電圧ベクトル110が最も近い軸の位相は、U相軸を基準として、「(n+2)π/3」にて表される。ここで、nは、(θ+ε)をπ/3で割った時に得られる商である。便宜上、図10に示す如く、θを、上記の位相(n+2)π/3と、その位相(n+2)π/3とθとの差分位相θDと、に分解する。これらの位相の関係は、式(1−1)及び式(1−2)にて表される。
dq座標を差分位相θDだけ座標変換することにより、電圧ベクトル110をab座標上における電圧ベクトルとして捉える。ab座標上で考え、電圧ベクトル110のa軸成分及びb軸成分をa軸電圧va及びb軸電圧vbとすると、d軸電圧vd及びq軸電圧vqとa軸電圧va及びb軸電圧vbは、下記式(1−3)の座標変換式を満たす。
差分位相θDは、以下のように算出できる。下記式(1−4)を用いて算出されるεに合致するn(即ち、(θ+ε)をπ/3で割った時に得られる商)を、θを参照して求める。その求めたnとθを上記式(1−2)に代入すれば、差分位相θDが得られる。
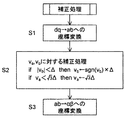
そして、式(1−3)に従って算出されたa軸電圧va及びb軸電圧vbを参照して補正処理を行う。図11に、この補正処理の手順を示すフローチャートを示す。ステップS1では、式(1−3)に従う座標変換が行われる。続くステップS2において、va及びvbに対する補正処理が行われる。
ステップS2では、まず、b軸電圧vbの大きさ(絶対値)が所定の閾値Δ(但し、Δ>0)より小さいか否かを判断する。即ち、下記式(1−5)が満たされるか否かを判断する。そして、b軸電圧vbの大きさが閾値Δより小さい場合であって且つb軸電圧vbが正である場合は、vbがΔとなるように補正する。b軸電圧vbの大きさが閾値Δより小さい場合であって且つb軸電圧vbが負である場合は、vbが(−Δ)となるように補正する。b軸電圧vbの大きさが閾値Δ以上の場合、vbに対して補正は施されない。
また、ステップS2において、a軸電圧vaが下記式(1−6)を満たすか否かも判断する。そして、式(1−6)を満たす場合、vaが式(1−6)の右辺と等しくなるようにvaを補正する。vaが下記式(1−6)を満たさない場合、vaに対して補正は施されない。尚、式(1−6)によって、電圧ベクトル110が図9の円131の内部に含まれるかを判断している。電圧ベクトル110が円131の内部に含まれる状態は、三相の相電圧が互いに接近している状態に対応しており、この状態においては、b軸電圧vbの大きさに関わらず2相分の電流は検出できない。
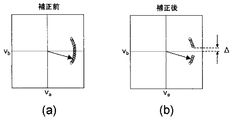
図12に、ステップS2による補正処理の前後の、ab座標上における電圧ベクトル(110)の軌跡を示す。図12(a)は、ab座標上における補正前の電圧ベクトル軌跡を表し、図12(b)は、ab座標上における補正後の電圧ベクトル軌跡を表す。図12(a)及び(b)は、b軸電圧vbが補正される場合を例示している。図12(a)及び(b)の夫々に、各タイミングの電圧を表すプロットが多数記されている。図12(a)に対応する補正前の電圧ベクトルは、2相分の電流を検出不可能なa軸近傍にも位置しうるが、図12(b)に対応する補正後の電圧ベクトルは、vbに対する補正によってa軸近傍に位置することがない。
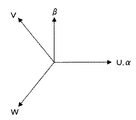
ステップS2による補正処理の後、ステップS3に移行し、補正後の電圧ベクトル110を「位相(n+2)π/3」だけ座標変換する。即ち、ab座標上における補正後の電圧ベクトル110を、αβ座標上の電圧ベクトル110に変換する。αβ座標(αβ固定座標)は、α軸とα軸に直交するβ軸とを座標軸に選んだ固定座標である。図13に示す如く、α軸はU相軸と一致している。電圧ベクトル110のα軸成分及びβ軸成分をα軸電圧vα及びβ軸電圧vβとすると、α軸電圧vα及びβ軸電圧vβと補正後のa軸電圧va及びb軸電圧vbは、下記式(1−7)の座標変換式を満たす。
また、補正後のa軸電圧va及びb軸電圧vbを、下記式(1−8)に従ってU相電圧vu及びV相電圧vvに変換することもできる。また、W相電圧vwは、下記式(1−9)に従って算出される。
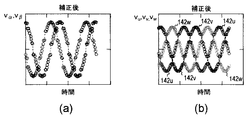
上記の補正処理を経た電圧ベクトルのαβ座標上の軌跡を図14に示す。この補正処理により、固定座標であるαβ座標において、電圧ベクトルが位置しない領域が電気角60度ごとに存在するようになる。また、上記の補正処理を経て得られるvα及びvβの電圧波形を、横軸を時間にとり、図15(a)に示す。また、上記の補正処理を経て得られるvu、vv及びvwの電圧波形を、横軸を時間にとり、図15(b)に示す。図15(b)において、歪んだ正弦波上に並ぶプロット群142uはvuの軌跡を、歪んだ正弦波上に並ぶプロット群142vはvvの軌跡を、歪んだ正弦波上に並ぶプロット群142wはvwの軌跡を表す。図15(b)からも分かるように、上記の補正処理によって各相電圧間の電圧差が所定値以上、確保されている。
このように、本補正手法では、dq座標から固定座標(例えば、αβ座標)へ座標変換する際、ab座標を介して2段階の座標変換を行うようにする。そして、補正のしやすいab座標上において電圧ベクトルに対する補正処理を実行することで、必要な補正を、簡素に且つ確実に実現する。ab座標において、電圧ベクトル(電圧指令ベクトル)の座標軸成分va及びvbを独立して補正するだけで済むため、補正内容が簡素である。特に印加電圧が低い時には3相全てに対して補正が必要となるが、このような場合にも補正量の決定が容易である。
尚、この2段階の座標変換と、dq座標とαβ座標との座標変換(通常の1段階の座標変換)とが等価であること、即ち下記式(1−10)が成立することは、上記式(1−2)より明らかである。
また、ステップS2でのb軸電圧vbに対する補正処理において、過去の補正を考慮して補正を行うようにしてもよい。この過去の補正を考慮した、vbに対する補正処理を、図16を参照して説明する。図16は、この補正処理の手順を示すフローチャートである。
モータ駆動システム内において、vbの値は所定のサンプリング周期Tsにて逐次更新されていく。vbをサンプリング周期Tsにて離散化して考え、各サンプリング周期Tsにおけるvbをvb(k)、vb(k−1)、vb(k−2)、・・・と表記する。また、変数Δbを定義し、各サンプリング周期Tsにおける変数ΔbをΔb(k)、Δb(k−1)、Δb(k−2)、・・・と表記する。
カッコ“( )”内に表記される記号(kまたは(k−1)など)は、サンプリング周期Tsで離散化した場合のサンプリングタイミングを表している。kは自然数であり、(k)は、(k−1)の次に訪れるサンプリングタイミングを表す。vb(k)及びΔb(k)は、k番目のサンプリングタイミングにおけるvb及びΔbであり、vb(k−1)及びΔb(k−1)は、(k−1)番目のサンプリングタイミングにおけるvb及びΔbである。尚、サンプリング周期TSは、キャリア信号のキャリア周期(図4参照)の整数倍とされる。キャリア周期が1/(10×103)[秒]の場合、TSは、例えば、1/(10×103)、1/(5×103)又は1/(2.5×103)[秒]とされる。
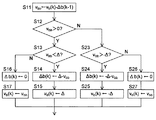
図16は、k番目のサンプリングタイミングに着目したフローチャートである。まず、ステップS11において、今回の補正前のvb(k)から前回の補正を考慮した変数Δb(k−1)を差し引いた値を変数vbbに代入する。そして、ステップS12において、変数vbbが正であるかを判断する。変数vbbが正である場合はステップS13に移行し、変数vbbが負(或いはゼロ)である場合はステップS23に移行する。
ステップS13では、変数vbbと上記の閾値Δ(式(1−5)など参照)を比較し、不等式「vbb<Δ」が成立する場合はステップS14に移行する一方、該不等式が不成立の場合はステップS16に移行する。ステップS14に移行した場合は、閾値ΔからステップS11で算出した変数vbbを差し引いた値を変数Δb(k)に代入し、続くステップS15において、閾値Δをvb(k)に代入する。他方、ステップS16に移行した場合は、変数Δb(k)にゼロを代入し、続くステップS17において変数vbbをvb(k)に代入する。ステップS15又はS17の処理を終えると図16の処理は終了する。
ステップS23では、変数vbbと(−Δ)を比較し、不等式「vbb>−Δ」が成立する場合はステップS24に移行する一方、該不等式が不成立の場合はステップS26に移行する。ステップS24に移行した場合は、(−Δ)からステップS11で算出した変数vbbを差し引いた値を変数Δb(k)に代入し、続くステップS25において、(−Δ)をvb(k)に代入する。他方、ステップS26に移行した場合は、変数Δb(k)にゼロを代入し、続くステップS27において変数vbbをvb(k)に代入する。ステップS25又はS27の処理を終えると図16の処理は終了する。
図16のステップS15、S17、S25又はS27の処理を経て得られたvb(k)は、今回の補正後のb軸電圧vbとして取り扱われる(但し、実際の補正が施されない場合もある)。ステップS14、S16、S24又はS26の処理を経て得られた変数Δb(k)は、(k+1)番目のサンプリングタイミングにおけるvbの補正処理に利用される。
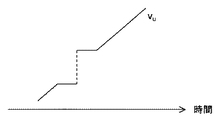
図8等の電圧ベクトル110が領域111外に位置するようにvbに対して補正を行うことにより、図15(b)に示す如く各相電圧が不連続となってしまう。図17に、この不連続部分における電圧(例えばvu)の様子を示す。この不連続性は、モータ1の滑らかな駆動にとって望ましいものではない。
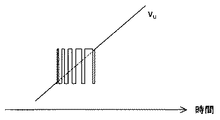
補正が必要な期間において(即ち、式(1−5)が満たされる期間において)、上述のステップS2(図11参照)の如く、単純に、vbが正ならvbにΔを代入し且つvbが負ならvbに(−Δ)を代入する手法を採用すれば、その不連続性は比較的大きくなるが、図16に示すような過去の補正を考慮した補正処理を実施することによって、vbがΔと(−Δ)との間を行ったりきたりする。この結果、例えば図18に示すように、電圧の不連続部分で電圧(例えばvu)がPWM変調されるかのように変動することになり、電圧の不連続性が緩和される。
以下に、上述の補正処理(補正手法)を適用した実施例として、第1〜第5実施例を例示する。尚、或る実施例(例えば第1実施例)に記載した事項は、矛盾なき限り、他の実施例にも適用される。
<<第1実施例>>
まず、第1実施例について説明する。図19は、第1実施例に係るモータ駆動システムの全体構成ブロック図である。図19において、図1と同一の部分には同一の符号を付す。
図19のモータ駆動システムは、モータ1、インバータ2、直流電源4及び電流センサ5を備えていると共に、図1の制御部3を形成する「電流検出部21、座標変換器22、電圧演算部23、電圧ベクトル補正部24、座標変換器25、位置センサ27、位置検出部28及び微分器29」を備えている。
位置センサ27は、ロータリエンコーダ等であり、モータ1の回転子6の実回転子位置θ(位相)に応じた信号を位置検出部28に送る。位置検出部28は、位置センサ27の出力信号に基づいて実回転子位置θを検出する。微分器29は、その実回転子位置θを微分することにより、実モータ速度ωを算出して出力する。
上述の如く、電流センサ5は、母線電流を検出し該母線電流の電流値を表す信号を出力する。母線電流をidcにて表す。電流検出部21は、座標変換器25が出力する三相電圧指令値vu *、vv *及びvw *を参照して、何れの相が最大相、中間相及び最小相であるかを特定すると共に電流センサ5の出力信号をサンプリングするタイミングST1及びST2(図6参照)を決定し、そのタイミングにおいて得た母線電流の電流値からU相電流iu及びV相電流ivを算出及び出力する。この際、必要に応じて、iu+iv+iw=0、の関係式を用いる(iwはW相電流を表す)。
座標変換器22は、実回転子位置θに基づいてU相電流iu及びV相電流ivをd軸電流id及びq軸電流iqに変換して出力する。
電圧演算部23には、外部から、モータ1(回転子6)を所望の速度で回転させるための指令値としてモータ速度指令値ω*が与えられる。また、電圧演算部23には、微分器29から実モータ速度ωが与えられ、座標変換器22からd軸電流id及びq軸電流iqが与えられる。電圧演算部23は、速度誤差(ω*−ω)に基づいて、q軸電流iqが追従すべきq軸電流指令値iq *を算出する。例えば、比例積分制御によって(ω*−ω)がゼロに収束するようにiq *を算出する。更に、電圧演算部23は、iq *を参照して、d軸電流idが追従すべきd軸電流指令値id *を算出する。例えば、最大トルク制御を実現するためのid *を算出する。そして、電圧演算部23は、電流誤差(id *−id)及び(iq *−iq)がゼロに収束するように比例積分制御を行って、d軸電圧vdが追従すべきd軸電圧指令値vd *及びq軸電圧vqが追従すべきq軸電圧指令値vq *を算出及び出力する。
電圧ベクトル補正部24は、vd *及びvq *並びにθに基づき、vd *及びvq *を座標変換を介して補正しつつα軸電圧vαが追従すべきα軸電圧指令値vα*及びβ軸電圧vβが追従すべきβ軸電圧指令値vβ*を算出して出力する。座標変換器25は、実回転子位置θに基づいてvα*及びvβ*を三相電圧指令値(vu *、vv *及びvw *)に変換し、該三相電圧指令値をインバータ2に出力する。インバータ2は、該三相電圧指令値に従って、上述の如く三相交流電流をモータ1に供給する。
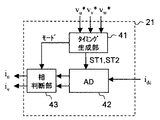
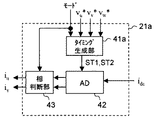
図20に、電流検出部21の内部ブロック図を示す。電流検出部21の動作の説明に、図6も参照される。電流検出部21は、タイミング生成部41と、AD変換器42と、相判断部43と、を有する。図6を参照して説明したように、vu *、vv *及びvw *は、夫々、カウンタの設定値CntU、CntV及びCntWとして表される。タイミング生成部41は、vu *、vv *及びvw *に基づき、カウンタの設定値CntU、CntV及びCntWの大小関係を判断して現時点が第1〜第6モードの何れに属するかを特定すると共に、特定されたモードを考慮して母線電流を検出すべきタイミングST1及びST2を決定する。例えば、「CntU>CntV>CntW」である場合、現時点は第1モードに属すると判断し、設定値CntWとCntVの間に対応するタイミングをST1、設定値CntVとCntUの間に対応するタイミングをST2と定める。
以下、現時点が属するモードを表す情報を、「モード情報」と呼ぶ。
AD変換器42は、タイミングST1とST2の夫々において電流センサ5の出力信号(アナログ出力信号)をサンプリングすることにより、タイミングST1とST2の夫々における母線電流idcの電流値をデジタル値として検出及び出力する。相判断部43は、タイミング生成部41にて特定されたモード情報を参照して、AD変換器42の出力信号からiu及びivを算出する。例えば、モード情報が第1モードを表す場合、タイミングST1及びST2にて検出される母線電流は、それぞれ、(−iw)及びiuである。iu+iv+iw=0、の関係式を用いれば、iu及びivを算出可能である。
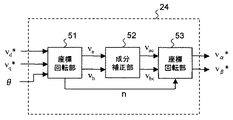
図21に、電圧ベクトル補正部24の内部ブロック図を示す。電圧ベクトル補正部24は、座標回転部51及び53と、成分補正部52と、を有する。電圧ベクトル補正部24では、上記式(1−3)及び(1−4)におけるvd及びvqとしてvd *及びvq *が用いられる。
座標回転部51は、vd *及びvq *並びにθに基づき、上記式(1−3)に従って、vd *及びvq *をva及びvbに変換する。つまり、vd *及びvq *によって表される、dq座標上の2相の電圧指令ベクトルを、va及びvaによって表される、ab座標上の2相の電圧指令ベクトルに変換する(これらの電圧指令ベクトルは、図8の電圧ベクトル110に相当する)。
式(1−3)に基づく演算を実施する上で差分位相θDが必要となるが、差分位相θDは、式(1−4)を参照して上述した手法を用いて算出される。また、差分位相θDを算出する際に座標回転部51にて求められたnは、座標回転部53での演算に利用される。
成分補正部52は、図11のステップS2における補正処理又は図16に示す補正処理をva及びvbに対して施し、補正後のva及びvbを、夫々vac及びvbcとして出力する。但し、補正が不要の場合は、vac=va且つvbc=vb、となる。
座標回転部53は、上記式(1−7)に従って、補正後のa軸電圧及びb軸電圧(即ちvac及びvbc)をvα*及びvβ*に変換する。つまり、vac及びvbcによって表される、ab座標上の2相の電圧指令ベクトルを、vα*及びvβ*によって表される、αβ座標(αβ固定座標)上の2相の電圧指令ベクトルに変換する。この際、式(1−7)におけるva、vb、vα及びvβとして、それぞれvac、vbc、vα*及びvβ*が用いられる。
第1実施例では、vu *、vv *及びvw *の大小関係に基づいて現時点が属するモードを特定することにより、タイミングST1及びST2において母線電流として母線13(図1参照)に流れる電流の相を判断する。そして、その判断結果(即ち、モード情報)に従って、vu *、vv *及びvw *からタイミングST1及びST2を決定する。
<<第2実施例>>
次に、第2実施例について説明する。図22は、第2実施例に係るモータ駆動システムの全体構成ブロック図である。図22において、図1及び図19と同一の部分には同一の符号を付す。
図22のモータ駆動システムは、モータ1、インバータ2、直流電源4及び電流センサ5を備えていると共に、図1の制御部3を形成する「電流検出部21a、座標変換器22、電圧演算部23、電圧ベクトル補正部24a、座標変換器25、位置センサ27、位置検出部28及び微分器29」を備えている。
図22のモータ駆動システムは、図19のモータ駆動システムにおける電流検出部21及び電圧ベクトル補正部24が電流検出部21a及び電圧ベクトル補正部24aに置換されている点において図19のモータ駆動システムと相違しており、その他の点において両モータ駆動システムは同様である。相違点に関して詳細に説明する。尚、第1実施例に記載した事項を第2実施例に適用する場合、符号21と21aの相違と符号24と24aの相違は、適宜、無視される。
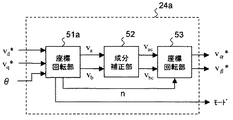
図23に、電圧ベクトル補正部24aの内部ブロック図を示す。電圧ベクトル補正部24aは、座標回転部51a及び53と、成分補正部52と、を有する。電圧ベクトル補正部24aでは、上記式(1−3)及び(1−4)におけるvd及びvqとしてvd *及びvq *が用いられる。
座標回転部51aは、vd *及びvq *並びにθに基づき、上記式(1−3)に従って、vd *及びvq *をva及びvbに変換する。式(1−3)に基づく演算を実施する上で差分位相θDが必要となるが、差分位相θDは、式(1−4)を参照して上述した手法を用いて算出される。また、差分位相θDを算出する際に座標回転部51aにて求められたnは、座標回転部53での演算に利用される。
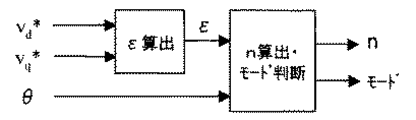
更に、座標回転部51aは、vd *及びvq *に基づいて求めたεをも参照して現時点が属するモードを特定し、モード情報を作成する。図24に、座標回転部51aの処理内容をブロック図として示す。図25に、座標回転部51aによるモード特定手法を説明するための表を示す。図6を参照して説明したように、例えば、第1モードにおいては「vu>vv>vw」が成立する。一方、図8を参照して説明したように、U相軸を基準とした電圧ベクトル(電圧指令ベクトル)の位相は(θ+ε+π/2)によって表され、「0<(θ+ε+π/2)<π/3」が成立する場合に、「vu>vv>vw」が成立する。
これを考慮し、座標回転部51aは、θ及びεを参照し、「0<(θ+ε+π/2)<π/3」が成立する場合は、現時点が第1モードに属すると判断する。同様に考えて、現時点は、
「π/3<(θ+ε+π/2)<2π/3」が成立する場合、第2モードに属し、
「2π/3<(θ+ε+π/2)<π」が成立する場合、第3モードに属し、
「π<(θ+ε+π/2)<4π/3」が成立する場合、第4モードに属し、
「4π/3<(θ+ε+π/2)<5π/3」が成立する場合、第5モードに属し、
「5π/3<(θ+ε+π/2)<2π」が成立する場合、第6モードに属すると判断する。
図23における成分補正部52及び座標回転部53は、図21におけるそれらと同じものである。
図26に、電流検出部21aの内部ブロック図を示す。電流検出部21aは、タイミング生成部41aと、AD変換器42と、相判断部43と、を有する。タイミング生成部41aは、vu *、vv *及びvw *に基づき、電圧ベクトル補正部24aにて作成されたモード情報を考慮して母線電流を検出すべきタイミングST1及びST2を決定する。電圧ベクトル補正部24aからモード情報が与えられるため、第1実施例(図20)のタイミング生成部41と異なり、タイミング生成部41aにてモードを特定するための判断を行う必要はない。
図26におけるAD変換器42及び相判断部43は、図20におけるそれらと同じのものである。但し、図26の相判断部43に対し、モード情報は、電圧ベクトル補正部24aから与えられる。
第2実施例では、U相軸を基準とした電圧指令ベクトルの位相(θ+ε+π/2)に基づいて現時点が属するモードを特定することにより、タイミングST1及びST2において母線電流として母線13(図1参照)に流れる電流の相を判断する。そして、その判断結果(即ち、モード情報)に従って、vu *、vv *及びvw *からタイミングST1及びST2を決定する。
<<第3実施例>>
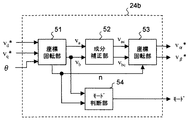
次に、第3実施例について説明する。第3実施例に係るモータ駆動システムの全体構成ブロック図は、第2実施例(図22)におけるそれと同様である。但し、第3実施例における電圧ベクトル補正部は、第2実施例におけるそれと異なる。第3実施例における電圧ベクトル補正部24bの内部ブロック図を図27に示す。第3実施例では、図22の電圧ベクトル補正部24aが電圧ベクトル補正部24bにて置き換えられる。電圧ベクトル補正部24bは、図26の電流検出部21aと組み合わせて用いられる。
電圧ベクトル補正部24bは、座標回転部51及び53と、成分補正部52と、モード判断部54と、を有する。電圧ベクトル補正部24bでは、上記式(1−3)及び(1−4)におけるvd及びvqとしてvd *及びvq *が用いられる。
座標回転部51及び53並びに成分補正部52は、図21におけるそれらと同じものである。座標回転部51にて算出されたn及びvbは、モード判断部54に送られる。
モード判断部54は、vb及びnに基づいて現時点が属するモードを特定してモード情報を作成し、該モード情報を電流検出部21a(図22)に送る。図28に、モード判断部54によるモード特定手法を説明するための表を示す。
図6を参照して説明したように、例えば、第1モードにおいては「vu>vv>vw」が成立する。一方、「3π/2<(θ+ε)<11π/6」が成立する場合に、「vu>vv>vw」が成立する。また、「3π/2<(θ+ε)<5π/3」が成立する場合は、n=4且つvb>0であり、「5π/3<(θ+ε)<11π/6」が成立する場合は、n=5且つvb<0である。
このような関係を考慮し、モード判断部54は、vbの極性とnの値に基づいて現時点が属するモードを特定する。具体的には、現時点は、
n=4且つvb>0の場合或いはn=5且つvb<0の場合、第1モードに属し、
n=5且つvb>0の場合或いはn=0且つvb<0の場合、第2モードに属し、
n=0且つvb>0の場合或いはn=1且つvb<0の場合、第3モードに属し、
n=1且つvb>0の場合或いはn=2且つvb<0の場合、第4モードに属し、
n=2且つvb>0の場合或いはn=3且つvb<0の場合、第5モードに属し、
n=3且つvb>0の場合或いはn=4且つvb<0の場合、第6モードに属すると判断する。
第3実施例では、ab座標上における2相の電圧指令ベクトルの座標軸成分であるvbと、ab座標の座標軸(a軸)とU相軸との位相差を電気角60度を単位として表した変数nと、に基づいて現時点が属するモードを特定し、これによってタイミングST1及びST2において母線電流として母線13(図1参照)に流れる電流の相を判断する。そして、その判断結果(即ち、モード情報)に従って、vu *、vv *及びvw *からタイミングST1及びST2を決定する。
<<第4実施例>>
次に、第4実施例について説明する。第4実施例では2相変調を用いる。このため、3相変調を前提として上述してきた内容の一部(図4に示すPWM信号など)は、第4実施例において、適宜変更して解釈される。今、dq座標、ab座標又はαβ座標における電圧ベクトル(電圧指令ベクトル)の大きさをVa2とし、その電圧ベクトルを3相電圧に変換した時の1相の電圧の振幅をVa3とすると、下記式(2−1)が成り立つ。
また、3相の電圧の内の2相の電圧が交差するとき、交差している2相の電圧が「+(1/2)・Va3」であって且つ交差しない残りの1相の電圧が「−Va3」であるか、或いは、交差している2相の電圧が「−(1/2)・Va3」であって且つ交差しない残りの1相の電圧が「+Va3」である。このため、2相の電圧が交差するとき、交差する2相の電圧と残りの1相の電圧との電圧差の絶対値は、(3/2)・Va3、である。
2相変調は、3相の電圧の最小相の電圧だけ各相の電圧(指令電圧)をシフトする変調方式であり、2相変調を行うと、最小相に対するPWM信号のパルス幅は常にゼロとなる(即ち、最小相に対する下アームが常にオンとなる)。2相変調を行う場合におけるU相電圧、V相電圧及びW相電圧を、それぞれvu '、vv '及びvw 'とした場合、それらと3相変調を行う場合におけるvu *、vv *及びvw *との関係は、下記式(2−2)、(2−3)及び(2−4)によって表される。ここで、min(vu *,vv *,vw *)は、最小相の電圧、即ち、3相変調を行う場合におけるvu *、vv *及びvw *の内の最小値を表す。
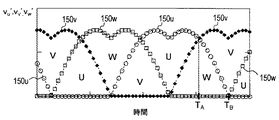
図29に、横軸を時間にとり、vu '、vv '及びvw 'の電圧波形を示す。図29において、丸状のプロット群にて形成される曲線150u、菱形状のプロット群にて形成される曲線150v及び正方形状のプロット群にて形成される曲線150wは、夫々、vu '、vv '及びvw 'の電圧波形を表す。但し、曲線150u、150v及び150wは、図11のステップS2等に示す補正処理を実行していない場合における電圧波形を表す。尚、図29並びに後に示す図30及び図31において、縦軸の長さは、キャリア信号(図4参照)の振幅に相当する。
3相変調を行う場合と同様、vu '、vv '及びvw 'の内の2つの電圧が交差するタイミングでは、2相分の電流を母線電流から検出することはできない。例えば、W相が最小相である場合においてU相電圧とV相電圧が交差するタイミングTAや、最小相がW相からU相に切り替わるタイミングTBでは、2相分の電流を母線電流から検出することはできない。
最小相から見て他の2相が交差する電圧をVXとする。そうすると、上述の説明から明らかなように、VXは、Va2又はVa3を用いて下記(2−5)のように表される。
ここで、式(2−6)が満たされるので、式(2−5)から、式(2−7)、(2−8)及び(2−9)が導かれる。
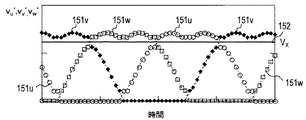
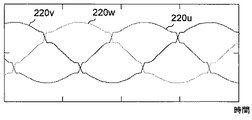
図30に、横軸を時間にとり、図11のステップS2等に示す補正処理を実行した場合におけるvu '、vv '及びvw 'の電圧波形を示す。図30において、丸状のプロット群にて形成される曲線151u、菱形状のプロット群にて形成される曲線151v及び正方形状のプロット群にて形成される曲線151wは、夫々、上記補正処理が施されたvu '、vv '及びvw 'の電圧波形を表す。図30において、破線152は、電圧VXの電圧レベル(電圧値)を表す。
図30にも表されているように、電圧VXは必ず最大相の電圧と中間相の電圧との間に存在する。従って、電圧VXを用いて母線電流を検出するタイミングを決定することができる。つまり、式(2−7)、(2−8)又は(2−9)から算出される電圧VXに相当するカウンタの設定値CntVXを生成し、カウンタの設定値CntVXを、母線電流から1相分の電流を検出するタイミングとして取り扱えばよい。
図4〜図6等を参照して説明したように、制御部3に設けられたカウンタは、キャリア周期ごとに、キャリア信号が最低レベルにあるタイミングを基準としてカウンタ値を0からアップカウントする。このため、各キャリア周期において、そのカウント値がCntVXに達したタイミングにて電流センサ5の出力信号をサンプリングすれば、母線電流を表す該出力信号から最大相の相電流を検出することができる。電圧VXは最大相の電圧と中間相の電圧との間に存在するため、カウント値がCntVXに達したタイミングは、三相変調を行う場合におけるタイミングT2とT3(図4参照)の間のタイミングに対応することになるからである。第4実施例では、カウント値がCntVXに達したタイミングをタイミングST2として取り扱う。
2相変調を行う場合、最小相の下アームが常にオン(最小相のカウンタの設定値がゼロ)とされるため、キャリア信号が最低レベルにあるタイミングは、図4のタイミングT1又はT6に相当することになる。従って、例えば、キャリア信号が最低レベルにあるタイミングにて電流センサ5の出力信号をサンプリングすれば、母線電流を表す該出力信号から最小相の相電流を検出することができる。第4実施例では、キャリア信号が最低レベルにあるタイミング、即ち、カウンタのカウント値がゼロであるタイミングをタイミングST1として取り扱う。
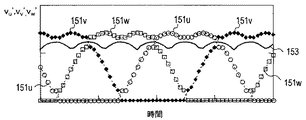
また、電圧VXの計算を簡略化するために、VXを下記式(2−10)のような近似式にて算出することもできる。図31の曲線153は、式(2−10)に従って算出された電圧VXの電圧レベル(電圧値)を表す。図31における曲線151u、151v及び151wは、図30のそれらと同じものである。図31に示す如く、式(2−10)に従って電圧VXを算出したとしても、電圧VXは必ず最大相の電圧と中間相の電圧との間に存在する。従って、式(2−10)から算出される電圧VXに相当するカウンタの設定値をCntVXとして設定するようにしても良い。
また、リンギング(スイッチングに由来して生じる電流脈動)等の存在を考慮すると、電流センサ5の出力信号をサンプリングするタイミングは、なるだけ、インバータ2内のスイッチング素子のスイッチングタイミングから離れていた方がよい。このため、補正幅に対応するΔ(上記式(1−5)等参照)を考慮して、式(2−7)、(2−8)、(2−9)又は(2−10)に基づいて決定されるCntVXに補正を加えるようにしてもよい。
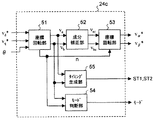
上述の電圧VXの算出を利用した、モータ駆動システムの全体構成ブロック図を図32に示す。図32において、図1及び図19と同一の部分には同一の符号を付す。
図22のモータ駆動システムは、モータ1、インバータ2、直流電源4及び電流センサ5を備えていると共に、図1の制御部3を形成する「電流検出部21c、座標変換器22、電圧演算部23、電圧ベクトル補正部24c、座標変換器25、位置センサ27、位置検出部28及び微分器29」を備えている。
図32のモータ駆動システムは、図19のモータ駆動システムにおける電流検出部21及び電圧ベクトル補正部24が電流検出部21c及び電圧ベクトル補正部24cに置換されている点において図19のモータ駆動システムと相違しており、その他の点において両モータ駆動システムは同様である。相違点に関して詳細に説明する。尚、第1実施例に記載した事項を第4実施例に適用する場合、符号21と21cの相違と符号24と24cの相違は、適宜、無視される。
図32のモータ駆動システムでは2相変調が行われる。3相変調を行う場合におけるvu *、vv *及びvw *が式(2−2)〜式(2−4)に従ってvu '、vv '及びvw 'に変換され、これらのvu '、vv '及びvw 'が2相変調におけるvu *、vv *及びvw *とされる。図32の座標変換部25からは、この2相変調におけるvu *、vv *及びvw *がインバータ2に与えられる。
図33に、電圧ベクトル補正部24cの内部ブロック図を示す。電圧ベクトル補正部24cは、座標回転部51及び53と、成分補正部52と、モード判断部54と、タイミング生成部55と、を有する。つまり、電圧ベクトル補正部24cは、図27の電圧ベクトル補正部24bにタイミング生成部55を追加したものであり、この追加を除いて、両電圧ベクトル補正部は同様のものである。
尚、本実施例では、第3実施例と同様、モード判断部54を設けてモード情報を作成しているが、現時点が属するモードを特定するための手法として、第1又は第2実施例で説明した手法を用いるようにしてもよい。
タイミング生成部55は、座標回転部51からのva及びvbを用い或いはvaのみを用い、上記式(2−7)又は式(2−10)に従って電圧VXを算出する。そして、算出した電圧VXに相当するカウンタの設定値CntVXを設定する。この設定によってタイミングST2が定まり、また、上述したように、カウント値が0であるタイミングがタイミングST1とされる。
また、vd *及びvq *を式(2−8)におけるvd及びvqとして用いつつ、式(2−8)に従って電圧VXを算出するようにしてもよい。また、vd *及びvq *をαβ座標上に変換して(即ち、θだけ座標回転させて)電圧ベクトルのα軸成分及びβ軸成分を算出し、このα軸成分及びβ軸成分を式(2−9)におけるvα及びvβとして用いつつ、式(2−9)に従って電圧VXを算出するようにしてもよい。
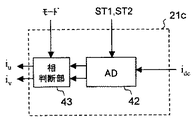
図34に、電流検出部21cの内部ブロック図を示す。電流検出部21cは、AD変換器42及び相判断部43から成り、図20のタイミング生成部41のようなタイミングST1及びST2を決定する部位を備えていない。電流検出部21cのAD変換器42は、図33のタイミング生成部55にて決定されたタイミングST2及びST1の夫々において、即ち、カウント値が設定値CntVXとなるタイミングと0となるタイミングの夫々において、電流センサ5の出力信号(アナログ出力信号)をサンプリングし、これによってタイミングST1とST2の夫々における母線電流の電流値をデジタル値として検出及び出力する。相判断部43は、タイミング生成部55にて特定されたモード情報を参照して、AD変換器42の出力信号からiu及びivを算出する。
第4実施例では、電圧ベクトル(電圧指令ベクトル)の大きさに基づいて、電流センサ5の出力信号をサンプリングするタイミングが決定される。また、ab座標上の電圧ベクトルのa軸成分から、該タイミングを決定することも可能である。
<<第5実施例>>
第1〜第4実施例では、回転子位置検出用の位置センサ27が設けられたモータ駆動システムを取り扱ったが、上述した全ての内容は、位置センサ27が設けられていない場合、即ち、所謂センサレス制御を実行する場合にも適用可能である。例として、図22及び図32に示すモータ駆動システムにセンサレス制御を適用した実施例を、第5実施例として説明する。図22及び図32に対応する、第5実施例に係るモータ駆動システムの全体ブロック図を、夫々、図35及び図36に示す。
図35のモータ駆動システムは、「図22のモータ駆動システムにおける位置センサ27、位置検出部28及び微分器29」を「速度推定器30及び積分器31」に置換した点において図22のモータ駆動システムと相違しており、その他の点において両モータ駆動システムは同様である。図36のモータ駆動システムは、「図32のモータ駆動システムにおける位置センサ27、位置検出部28及び微分器29」を「速度推定器30及び積分器31」に置換した点において図32のモータ駆動システムと相違しており、その他の点において両モータ駆動システムは同様である。
但し、図35及び図36のモータ駆動システムでは、位置センサが設けられていないため、適宜、上述の説明文及び各式における「d」、「q」、「θ」及び「ω」は、夫々「γ」、「δ」、「θe」及び「ωe」に読み替えられる。
従って、図35又は図36において、座標変換器22は、推定回転子位置θeに基づいてiu及びivをiγ及びiδに変換し、座標変換器25は、推定回転子位置θeに基づいてvα*及びvβ*を三相電圧指令値(vu *、vv *及びvw *)に変換し、電圧演算部23は、iγ及びiδ並びにω*及び推定モータ速度ωeに基づいて、iγ及びiδが追従すべきγ軸電流指令値iγ*及びδ軸電流指令値iδ*を算出し、更にvγ及びvδが追従すべきγ軸電圧指令値vγ*及びδ軸電圧指令値vδ*を算出する。勿論、図35又は図36において、電圧ベクトル補正部24a又は24cは、vd *及びvq *並びにθの代わりにvγ*及びvδ*並びにθeを用いて、上述と同様の補正処理を行う。
速度推定器30は、iγ、iδ、vγ*及びvδ*の全部又は一部を用いて、推定モータ速度ωeを算出する。ωeの算出法として様々な手法が知られており、その何れをも用いることができる。例えば、iγ、iδ、vγ*及びvδ*を用いてモータ1内に生じる誘起電圧を見積もることにより軸誤差Δθを算出し、軸誤差Δθがゼロに収束するように比例積分制御を行うことによりωeを算出する。積分器31は、ωeを積分することによりθeを算出する。
各実施例では、2相分の電流を検出できない領域に電圧ベクトル(電圧指令ベクトル)が位置する場合、回転座標から3相の固定座標へ座標変換する過程において、電圧ベクトルが該領域外に位置するように電圧ベクトルを補正する。これにより、確実にモータ電流(各相電流)を検出することができる。モータ1の回転の停止状態又は低速状態においても確実にモータ電流を検出できるため、停止状態からのモータ駆動が確実に行えるようになり、特に、モータにて駆動する電動車(Electric Vehicle;電動バイクを含む)等において滑らかな始動を実現できる。尚、上記特許文献2のように電流の推定を行う方式を採用すると、検出ではなく推定を行うが故に、ベクトル制御に用いる電流値に多少なりとも誤差が含まれることになる。この誤差は、滑らかな始動にとって好ましくない。
また、電圧ベクトル(電圧指令ベクトル)の座標軸成分va及びvbを独立して補正するだけで済むため、補正内容が簡素である。特に印加電圧が低い時には3相全てに対して補正が必要となるが、このような場合にも補正量の決定が容易である。
本発明を適用したモータ駆動システムの実施例を上述したが、本発明は、様々な変形例(又は他の実施例)を含む。以下に、第1実施形態に対する変形例(又は他の実施例)又は注釈事項として、注釈1〜注釈5を記す。各注釈に記載した内容は、矛盾なき限り、任意に組み合わせることが可能である。
[注釈1]
第4実施例を除き、インバータ2にて3相変調を用いる場合を取り扱ったが、本発明は変調方式に依存しない。例えば、インバータ2にて2相変調を行う場合、通電パターンは、図3に示した3相変調のそれと異なってくる。2相変調では、最小相の下アームが常にオンとされるため、図4におけるタイミングT0−T1間及びT6−T7間に対応する通電パターンが存在しない。しかしながら、結局、タイミングT1−T2間及びT2−T3間に対応する通電パターンにて母線電流を検出するようにすれば、最大相及び最小相の電流を検出できることに変わりはない。
尚、2相変調を行うことにより、相電圧の基本波成分の振幅を3相変調(正弦波変調)におけるそれよりも拡大することができる。これにより、最大相のパルス幅に対する制限が緩和され、該最大相のパルス幅を最大限に利用可能となる(即ち、パルスのデューティを100%まで拡大することができる)。また、最小相に対するPWM信号のパルス幅は常にゼロとされるため、1相分のスイッチングロスが低減される。
[注釈2]
第1〜第5実施例に示したモータ駆動システムにおいては、補正されたa軸電圧及びb軸電圧を、一旦、α軸電圧及びβ軸電圧に変換し、その後三相電圧に変換している。しかしながら、α軸電圧及びβ軸電圧への変換を省略することも可能である。
即ち、図21等の成分補正部52にて算出されたvac及びvbcを、上記式(1−8)及び(1−9)に従って、αβ座標を介することなく、vu *、vv *及びvw *に変換するようにしてもよい。この際、式(1−8)及び(1−9)におけるva及びvb並びにvu、vv及びvwとして、vac及びvbc並びにvu *、vv *及びvw *が用いられる。尚、この場合、図21等の座標回転部53は不要である。
[注釈3]
また、上述のモータ駆動システムを構成する各部位は、必要に応じてモータ駆動システム内で生成される値の全てを自由に利用可能となっている。
[注釈4]
また、制御部3(図1参照)の機能の一部または全部は、例えば汎用マイクロコンピュータ等に組み込まれたソフトウェア(プログラム)を用いて実現される。ソフトウェアを用いて制御部3を実現する場合、制御部3の各部の構成を示すブロック図は機能ブロック図を表すこととなる。勿論、ソフトウェア(プログラム)ではなく、ハードウェアのみによって制御部3を構成しても構わない。
[注釈5]
また、例えば、制御部3は、モータ制御装置として機能する。モータ制御装置内に、図1等の電流センサ5が含まれていると考えても構わない。また例えば、図19等の電圧演算部23と図21等の座標回転部51(又は51a)は、電圧指令ベクトル作成手段として機能する。また例えば、図21等の成分補正部52は、電圧指令ベクトル補正手段として機能する。また例えば、図19等の座標変換器25は、三相電圧指令値作成手段として機能する。
<<第2実施形態>>
次に、本発明の第2実施形態について説明する。第2実施形態では、上述の第1実施形態で述べた技術を系統連系に利用する。第1実施形態の記載内容は、適宜、第2又は後述の第3実施形態に適用されるが、第1実施形態と異なる点は、第2又は後述の第3実施形態における説明文中で記述される。
図39は、第2実施形態に係る系統連系システムの全体構成図である。図39の系統連系システムでは、太陽電池で発電した電力を三相式のインバータを用いて三相の系統に連系する。本実施形態では、電流制御系電圧連系三相インバータを組み込んだ系統連系システムを例にとる。この種の系統連系インバータでは、電流指令値に追従するように連系点に電圧を印加することによって系統との連系がなされる(例えば、上記非特許文献1を参照)。
第2及び後述の第3実施形態間の共通事項を適宜指摘しながら、図39の各部位の接続関係等を説明する。図39において、符号304は、直流電源としての太陽電池である。図39には、太陽電池304の等価回路が示されている。太陽電池304は、太陽エネルギーに基づく発電を行い、直流電圧を発生させる。その直流電圧は、負出力端子304bを低電圧側として、正出力端子304aと負出力端子304bとの間に生じる。平滑化コンデンサCdの両端子間には正出力端子304aと負出力端子304bとの間の直流電圧が印加され、平滑化コンデンサCdは該直流電圧に応じた電荷を蓄える。電圧検出器306は、平滑化コンデンサCdの両端子間電圧の電圧値を検出し、検出値を制御部303に送る。
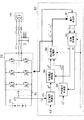
図39におけるPWMインバータ302(以下、単に「インバータ302」という)は、図1のインバータ2と同じ三相式のインバータであり、それの内部構成はインバータ2と同じである。
インバータ302は、U相用のハーフブリッジ回路、V相用のハーフブリッジ回路及びW相用のハーフブリッジ回路を備える。各ハーフブリッジ回路は、一対のスイッチング素子を有する。各ハーフブリッジ回路において、一対のスイッチング素子は、正出力端子304aと負出力端子304bとの間に直列接続され、各ハーフブリッジ回路に平滑化コンデンサCdの両端子間電圧が印加される。尚、u、v及びwは、一般的に、三相式のモータにおける各相を表す記号として用いられ、第2及び後述の第3実施形態で想定されるようなシステムでは、各相を表す記号としてu、v及びw以外の記号(例えば、a、b及びc)が用いられることも多い。しかしながら、第2及び後述の第3実施形態では、説明の便宜上、インバータ302の各相を表す記号としてu、v及びwを用いる。
系統連系システムにおいて、直列接続された上アーム8uと下アーム9uの接続点、直列接続された上アーム8vと下アーム9vの接続点、直列接続された上アーム8wと下アーム9wの接続点は、夫々、インバータ302のU相の出力端子である端子312u、インバータ302のV相の出力端子である端子312v、インバータ302のW相の出力端子である端子312wに接続される。尚、図39では、各スイッチング素子として電界効果トランジスタが示されているが、それらをIGBT(絶縁ゲートバイポーラトランジスタ)などに置き換えることもできる。
端子312u、312v及び312wは、夫々、連系用リアクトル(インダクタ)及び屋内配線を介して連系点330u、330v及び330wに接続される。端子312uと連系点330uとの間に介在する連系用リアクトル及び屋内配線のリアクタンス成分をLCにて表す。同様に、端子312vと連系点330vとの間におけるそれ、及び、端子312wと連系点330wとの間におけるそれもLCにて表す。尚、端子312u、312v及び312wと連系点330u、330v及び330wとの間に三相変圧器(トランス;不図示)を介在させ、該三相変圧器を用いて系統連系を行うようにしてもよい。この三相変圧器は、インバータ302側と系統側(後述の電力系統340側)との絶縁や変圧を目的として設けられる。
符号340は、三相交流電力を供給する電力系統(系統側電源)である。電力系統340を、3つの交流電圧源340u、340v及び340wに分解して考えることができ、交流電圧源340u、340v及び340wの夫々は、基準点341を基準として角周波数(角速度)ωSの交流電圧を出力する。但し、交流電圧源340u、340v及び340wが出力する交流電圧の位相は、互いに、電気角で120度ずつ異なっている。
電力系統340は、基準点341を基準とした交流電圧源340u、340v及び340wの出力電圧を、夫々、端子342u、342v及び342wから出力する。端子342u、342v及び342wは、夫々、屋外配線を介して連系点330u、330v及び330wに接続される。ここで、各屋外配線における線路インピーダンスのリアクタンス成分及び抵抗成分を夫々LS及びRSにて表す。
異なる連系点間には家電製品等の負荷が接続される。図39に示す例では、連系点330uと330vとの間に線形負荷である負荷335が接続され、連系点330vと330wとの間に非線形負荷である負荷336が接続されている。このため、負荷335は、連系点330u−330v間電圧を駆動電圧として駆動され、負荷336は、連系点330v−330w間電圧を駆動電圧として駆動される。線形負荷とは、オームの法則に従う負荷であり、非線形負荷とは、オームの法則に従わない負荷である。例えば、AC/DCコンバータのような整流回路を含む負荷が負荷336として想定される。
インバータ302は、制御部303から与えられた三相電圧指令値に基づいて各相に対するPWM信号(パルス幅変調信号)を生成し、該PWM信号をインバータ302内の各スイッチング素子の制御端子(ベース又はゲート)に与えることで、各スイッチング素子をスイッチング動作させる。制御部303からインバータ302に供給される三相電圧指令値は、U相電圧指令値vu *、V相電圧指令値vv *及びW相電圧指令値vw *から構成され、vu *、vv *及びvw *によって、夫々、U相電圧vu、V相電圧vv及びW相電圧vwの電圧レベル(電圧値)が表される。そして、インバータ302は、vu *、vv *及びvw *に基づいて、各スイッチング素子のオン(導通)又はオフ(非導通)を制御する。尚、第2及び後述の第3実施形態においても、第1実施形態と同様、デッドタイムの存在を無視する。
太陽電池304からの直流電圧は、インバータ302内の各スイッチング素子のスイッチング動作によって、PWM変調(パルス幅変調)された三相交流電圧に変換される。図39の系統連系システムでは、直流電源としての太陽電池304と電力系統340との系統連系が行われ、電力系統340に連係しつつインバータ302からの三相交流電圧に応じた交流電力が負荷335及び336に供給される。
電流センサ305は、インバータ302の母線313に流れる電流を検出する。この電流を、第1実施形態と同様、第2及び及び後述の第3実施形態においても、母線電流と呼ぶ。母線電流は直流成分を有するため、それを直流電流と解釈することもできる。インバータ302において、下アーム9u、9v及び9wの低電圧側は共通結線されて太陽電池304の負出力端子304bに接続される。下アーム9u、9v及び9wの低電圧側が共通結線される配線が母線313であり、電流センサ305は、母線313に直列に介在している。電流センサ305は、検出した母線電流(検出電流)の電流値を表す信号を制御部303に伝達する。制御部303は、電流センサ305の出力信号等を参照しつつ上記三相電圧指令値を生成及び出力する。尚、電流センサ305は、例えば、シャント抵抗又はカレントトランス等である。また、下アーム9u、9v及び9wの低電圧側と負出力端子304bとを接続する配線(母線313)にではなく、上アーム8u、8v及び8wの高電圧側と正出力端子304aとを接続する配線に電流センサ305を設けるようにしてもよい。
第1実施形態におけるU相電圧vu、V相電圧vv及びW相電圧vwは、図1の中性点14から見た端子12u、12v及び12wの電圧を意味していたが、第2及び後述の第3実施形態におけるU相電圧vu、V相電圧vv及びW相電圧vwは、夫々、或る固定電位を有する基準電位点から見た端子312u、312v及び312wの電圧を指す。例えば、第2実施形態では、基準点341を上記基準電位点として捉えることができる。U相電圧、V相電圧及びW相電圧の夫々を(或いはそれらを総称して)相電圧と呼ぶ。更に、第2及び後述の第3実施形態において、端子312u、312v及び312wを介して流れる電流を、夫々、U相電流iu、V相電流iv及びW相電流iwと呼び、それらの夫々を(或いはそれらを総称して)相電流と呼ぶ。また、相電流において、端子312u、312v又は312wから流れ出す方向の電流の極性を正とする。
第2及び後述の第3実施形態における各相電圧は、第1実施形態における各相電圧と同様(図2参照)、正弦波状とされ且つ各相電圧間の電圧レベルの高低関係は時間と共に変化していく。この高低関係は三相電圧指令値によって定まり、インバータ302は与えられた三相電圧指令値に従って各相に対する通電パターンを決定する。合計8通りの通電パターンは、第1実施形態におけるそれ(図3参照)と同じである。
また、第2及び後述の第3実施形態において、各相電圧の電圧レベルとキャリア信号との関係、並びに、その関係に応じたPWM信号及び母線電流の波形も、第1実施形態におけるそれら(図4参照)と同じである。キャリア信号は、各相電圧の電圧レベルと比較するために制御部303(第1又は第3実施形態では制御部3又は503)内で生成される周期的な三角波信号であり、その周期をキャリア周期という。また、第2及び後述の第3実施形態において、第1実施形態と同じように、最大相、中間相及び最小相を定義する。最大相、中間相及び最小相の組み合わせは、第1実施形態と同様に6通り存在し(図6参照)、第2及び後述の第3実施形態において、それらの6通りの組み合わせを第1実施形態と同様に第1〜第6モードにて分類する。
vu *、vv *及びvw *に基づくインバータ302の各アームに対するスイッチング動作は、第1実施形態と同様である。即ち、インバータ302は、第1実施形態のインバータ2と同様、vu *、vv *及びvw *によって表される各相電圧の電圧レベルとキャリア信号を比較し、その比較結果に基づいて各アームのオン/オフを制御する。図4に示すような状況を想定した場合、タイミングT1−T2間或いはT5−T6間で母線電流を検出すれば、母線電流から最小相の電流を検出することができ、タイミングT2−T3間或いはT4−T5間で母線電流を検出すれば、母線電流から最大相の電流を検出することができる。そして、中間相の電流は、三相電流の総和が0になることを利用して計算で得ることができる。
また、第2及び後述の第3実施形態において、第1実施形態と同様、最小相の相電流を検出するサンプリングタイミング(例えば、タイミングT1とT2の中間タイミング)をST1にて表し、最大相の相電流を検出するサンプリングタイミング(例えば、タイミングT2とT3の中間タイミング)をST2にて表す。
第2実施形態では、端子312u、312v及び312wを介してインバータ302から出力される電流を、総称して「連系電流」と呼ぶ。U相電流iu、V相電流iv及びW相電流iwは、夫々、連系電流のU相軸成分、V相軸成分及びW相軸成分に相当する。
図40に、制御部303の内部ブロック図を含む、第2実施形態に係る系統連系システムの全体構成図を示す。制御部303は、符号351〜356で参照される各部位を含む。制御部303では、母線電流から各相電流を検出し、検出した3相の相電流を有効電流及び無効電流に変換することにより(即ち、連系電流をP−Q変換することにより)、瞬時有効電流iP及び瞬時無効電流iQを算出する。そして、平滑化コンデンサCdの両端子間電圧の電圧値が所望値に保たれるように且つ瞬時無効電流iQがゼロとなるように電圧指令ベクトルが作成される。各相電流の検出を常時可能とするために、電圧指令ベクトルは、第1実施形態と同様にしてab座標上で補正され、補正後の電圧指令ベクトルから三相電圧指令値(vu *、vv *及びvw *)が生成される。
図40に示される各部位の動作を詳説する前に、制御部303内で参照される複数の軸の関係について説明する。図41は、固定軸であるU相軸、V相軸及びW相軸と、回転軸であるP軸及びQ軸と、の関係を表す空間ベクトル図である。第1実施形態と同様、V相軸の位相は、U相軸を基準として電気角で120度だけ進んでおり、W相軸の位相は、V相軸を基準として更に電気角で120度だけ進んでいる。P軸の回転における角周波数(角速度)は、各交流電圧源340u、340v及び340wが出力する交流電圧の角周波数ωSと同じとする。図39の連系点330u、330v及び330wにおける各電圧の合成電圧を二次元座標面上のベクトル量として捉え、その電圧のベクトルをeCによって表す。仮に、インバータ302がeCと同位相の電流(eCと向きが一致する電流ベクトルによって表される電流)を出力すれば、インバータ302は、有効電力のみを出力することになる(この場合、無効電力は電力系統340から供給されることになる)。
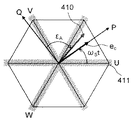
従って、P軸の向きは、電圧ベクトルeCの向きと同じとされる(故に、電圧ベクトルeCはP軸上にのることになる)。そして、P軸から電気角で90度進んだ位相にQ軸をとり、P軸及びQ軸を座標軸に選んだ座標をPQ座標と呼ぶ。また、U相軸とP軸が一致する時点からの経過時間をtで表し、U相軸から見たP軸の位相をωStにて表す(t=0の時、U相軸とP軸は一致する)。インバータ302の出力電圧の位相は、LCで表される連系用リアクトルの分だけ電圧ベクトルeCから進められる。図41において、符号410が付されたベクトルが、インバータ302の出力電圧の電圧ベクトルである。Q軸から見た電圧ベクトル410の位相をεAにて表す。図41において、半時計回り方向を位相の進み方向と考え、εA<0とする。そうすると、U相軸を基準とした電圧ベクトル410の位相は、(ωSt+εA+π/2)にて表される。
第1実施形態における電圧ベクトル110と同様(図8参照)、電圧ベクトル410は、U相電圧vu、V相電圧vv及びW相電圧vwの合成電圧を二次元座標面上のベクトル量として捉えたものであり、電圧ベクトル410のU相軸成分、V相軸成分及びW相軸成分が、vu、vv及びvwに相当する。また、PQ座標に着目すれば、電圧ベクトル410をP軸成分とQ軸成分に分解することができる。電圧ベクトル410のP軸成分とQ軸成分を、それぞれP軸電圧vP及びQ軸電圧vQで表す。実際には、制御部303内においてP軸電圧指令値vP*及びQ軸電圧指令値vQ*が算出され、vP*及びvQ*によって電圧ベクトル410が表される。このため、符号410に対応する電圧ベクトルは、電圧指令ベクトルとも読み替えられる。
U相軸近傍、V相軸近傍及びW相軸近傍のハッチングが施されたアスタリスク状の領域411は、2相分の電流が検出できない領域を表している。例えば、V相電圧とW相電圧が近くて2相分の電流が検出できない場合、電圧ベクトル410はU相軸近傍に位置することになり、U相電圧とW相電圧が近くて2相分の電流が検出できない場合、電圧ベクトル410はV相軸近傍に位置することになる。領域411は、図8の領域111と同様、U相軸を基準として電気角で60度ごとに存在する。このため、第1実施形態と同様の考え方にて、第1実施形態と同様の、電気角60度ごとにステップ的に回転するab座標を定義することができる(尚、PQ座標は連続的に回転する座標である)。具体的には、第1実施形態における図8の電圧ベクトル110及び電圧ベクトル110の位相(θ+ε+π/2)を、電圧ベクトル410及び電圧ベクトル410の位相(ωSt+εA+π/2)に読み替えた上で、第1実施形態で述べたab座標の定義を本実施形態にも適用すればよい(図8及び図9参照)。この結果、a軸は、電圧ベクトル410の位相(ωSt+εA+π/2)に応じて、電気角60度ごとにステップ的に回転し、b軸も、a軸と直交しつつa軸と共に60度ごとにステップ的に回転することになる。
図40に示される各部位の動作の説明を行う。電流センサ305によって検出された母線電流(検出電流)の電流値を表す信号は、電流検出部351に伝達される。電流検出部351は、図19の電流検出部21と同様の動作を行う。即ち、電圧指令処理部356が出力する三相電圧指令値vu *、vv *及びvw *を参照して、何れの相が最大相、中間相及び最小相であるかを特定すると共に電流センサ305の出力信号をサンプリングするタイミングST1及びST2(図6参照)を決定し、そのタイミングにおいて得た母線電流の電流値からU相電流iu及びV相電流ivを算出及び出力する。この際、必要に応じて、iu+iv+iw=0、の関係式を用いる。
座標変換器352は、位相ωStに基づいて電流検出部351からのiu及びivをPQ座標上に座標変換することにより、連系電流における有効電流及び無効電流を算出する。算出された有効電流及び無効電流は、有効電流の瞬時値及び無効電流の瞬時値を表すため、それらを、それぞれ瞬時有効電流及び瞬時無効電流と呼ぶ。また、瞬時有効電流及び瞬時無効電流を、それぞれiP及びiQで表す。iP及びiQは、夫々、連系電流におけるP軸成分及びQ軸成分を表している。具体的には、iP及びiQは、下記式(3−1)に従って算出される。
位相ωStは、インバータ302の出力電圧の位相に対応している。図41を参照して説明したように、U相軸とP軸が一致する時点からの経過時間をtで表し、U相軸から見たP軸の位相をωStにて表すこととしているため、U相電圧vuの位相から位相ωStを定めればよい。実際には、インバータ302による電圧出力を行う前に端子312uに現れる交流電圧源340uからの交流電圧の角周波数及び位相を検出し、検出した角周波数及び位相に合わせてωSの値及びt=0となる時点を定めればよい。vu、vv及びvwは角周波数ωSの正弦波電圧とされ(但し、電圧指令処理部356の補正処理による歪みを含む)、それらの位相は互いに電気角で120度ずつ異なる。
直流電圧制御部353には、電圧検出器306によって検出された平滑化コンデンサCdの両端子間電圧Edと、その両端子間電圧Edの目標値を表す直流電圧指令値Ed*とが与えられる。直流電圧指令値Ed*は、太陽電池304から最大電力を得るためのEd(換言すれば、インバータ302の出力電力を最大とするためのEd)と合致する。直流電圧制御部353は、比例積分制御によって(Ed−Ed*)がゼロに収束するように有効電流指令値iP*を算出及び出力する。また、無効電流指令値iQ*はゼロとされる。iP*はiPが追従すべき目標値を表し、iQ*はiQが追従すべき目標値を表す。
有効電流制御部354は、直流電圧制御部353からのiP*と座標変換器352からのiPとに基づき、電流誤差(iP*−iP)がゼロに収束するように比例積分制御を行うことにより、P軸電圧vPが追従すべきP軸電圧指令値vP*を算出する。無効電流制御部355は、与えられたiQ*と座標変換器352からのiQに基づき、電流誤差(iQ*−iQ)がゼロに収束するように比例積分制御を行うことにより、Q軸電圧vQが追従すべきQ軸電圧指令値vQ*を算出する。
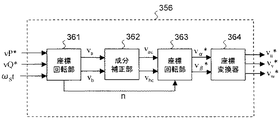
電圧指令処理部356の機能は、図19の電圧ベクトル補正部24及び座標変換器25を組み合わせた部位の機能と略同じである。図42に、電圧指令処理部356の内部ブロック図を示す。図42の電圧指令処理部356は、符号361〜364にて参照される各部位を備える。
座標回転部361は、vP*及びvQ*並びにωStに基づき、上記式(1−3)の変形式に従って、vP*及びvQ*をva及びvbに変換する。つまり、vP*及びvQ*によって表される、PQ座標上の2相の電圧指令ベクトルを、va及びvaによって表される、ab座標上の2相の電圧指令ベクトルに変換する。
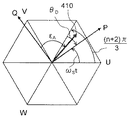
上記式(1−3)の変形式とは、式(1−3)におけるvd及びvqをvP*及びvQ*に置換することによって得られる式を指す。また、図43に示す如く、a1軸〜a6軸の内(図9参照)、電圧ベクトル410が最も近い軸の、U相軸を基準とした位相は「(n+2)π/3」にて表される。第2実施形態におけるnは、(ωSt+εA)をπ/3で割った時に得られる商である。そして、下記式(3−2)を満たすθDを、座標回転部361による式(1−3)の変形式の演算に用いる。
式(3−2)を満たすθDは、以下のように算出できる。下記式(3−3)を用いて算出されるεAに合致するn(即ち、(ωSt+εA)をπ/3で割った時に得られる商)を、ωStを参照して求める。その求めたnとωStを上記式(3−2)に代入すれば、θDが得られる。また、このθDを算出する際に求められたnは、座標回転部363での演算に利用される。尚、Q軸を基準としたεAの代わりに、P軸を基準としたεA’を用いて各演算を行うようにしてもよい。εA’は、P軸から見た電圧ベクトル410の位相を表す。この場合、関係式「εA=εA’−π/2」を用いて変数nの算出等が行われる。
図42の成分補正部362、座標回転部363及び座標変換器364の機能は、夫々、第1実施形態における成分補正部52、座標回転部53及び座標変換器25(図19及び図21参照)の機能と同様である。
即ち、成分補正部362は、図11のステップS2における補正処理又は図16に示す補正処理を、座標回転部361にて得られたva及びvbに対して施し、補正後のva及びvbを、夫々vac及びvbcとして出力する。但し、補正が不要の場合は、vac=va且つvbc=vb、となる。
座標回転部363は、上記式(1−7)に従って、成分補正部362から出力された補正後のa軸電圧及びb軸電圧(即ちvac及びvbc)をvα*及びvβ*に変換する。つまり、vac及びvbcによって表される、ab座標上の2相の電圧指令ベクトルを、vα*及びvβ*によって表される、αβ座標(αβ固定座標)上の2相の電圧指令ベクトルに変換する。この際、式(1−7)におけるva、vb、vα及びvβとして、それぞれvac、vbc、vα*及びvβ*が用いられる。尚、αβ座標は、第1実施形態で定義したそれと同じものである。但し、勿論、第2実施形態におけるvα*及びvβ*は、インバータ302の出力電圧に対する電圧指令ベクトルの直交2軸成分である。
座標変換器364は、座標回転部363にて得られたvα*及びvβ*を三相電圧指令値(vu *、vv *及びvw *)に変換し、該三相電圧指令値をインバータ302に出力する。また、この三相電圧指令値は、電流検出部351にも与えられる。
このように、第1実施形態で述べた補正手法を系統連系システムに適用することが可能であり、これによって第1実施形態と同様の効果を得ることが可能である。即ち例えば、補正の簡素化や補正量の決定の容易化が図られる。
尚、系統連系システムの制御部303によって実行される制御は、有効電流及び無効電流に対する制御と言えるが、有効電力及び無効電力に対する制御とも言える。電力系統340からの交流電圧は振幅が略一定の交流電圧であるがゆえ、その交流電圧と連系して有効電流及び無効電流が所望値となるように制御するということは、有効電力及び無効電力を所望値となるように制御していることに他ならないからである(電圧に有効電流を掛けたものが有効電力であり、無効電流を掛けたものが無効電力である)。従って、制御部303を、電流制御装置と呼ぶことができると共に電力制御装置と呼ぶこともできる。
また、インバータ302に対する直流電源の例として太陽電池304を挙げたが、太陽電池304の代わりに燃料電池や風力発電機等を用いるようにしてもよい。
<<第3実施形態>>
第1及び第2実施形態に係るシステムでは、検出した電流を電流制御(又は電力制御)に利用した。しかしながら、検出した電流を電流制御(又は電力制御)に用いるのではなく、保護等を目的として電流検出を行うシステムにも第1又は第2実施形態で述べた技術は適用可能である。この種のシステムを本発明の第3実施形態として説明する。
図44は、第3実施形態に係る三相負荷駆動システムの全体構成図である。図44において、インバータ302、太陽電池304、電流センサ305及び平滑化コンデンサCdは、第2実施形態の図39に示すそれらと同じものであり、それらの間の接続関係も第2実施形態と同じであるとする。説明の便宜上、三相負荷駆動システムのインバータ302に対する直流電源を第2実施形態と同じく太陽電池304としているが、インバータ302に対する直流電源として任意の直流電源を用いることができる。
第2実施形態と異なり、三相負荷駆動システムでは、インバータ302の出力端子である端子312u、312v及び312wが、系統側に接続されること無く、三相負荷に接続されている。より具体的には、端子312uは負荷540uを介して基準点541に接続され、端子312vは負荷540vを介して基準点541に接続され、端子312wは負荷540wを介して基準点541に接続されている。
図44の三相負荷駆動システムにおけるU相電圧vu、V相電圧vv及びW相電圧vwは、夫々、基準点541の電位を基準とする端子312u、312v及び312wの電圧であり、負荷540u、540v及び540wは、夫々、U相電圧vu、V相電圧vv及びW相電圧vwを駆動電圧として受ける。負荷540u、540v及び540wは、夫々、例えば、インダクタや抵抗素子等の負荷である。vu、vv及びvwは角周波数(角速度)ωSの正弦波電圧とされ(但し、電圧指令処理部553の補正処理による歪みを含む)、それらの位相は互いに電気角で120度ずつ異なる。尚、説明の便宜上、第2実施形態でも導入した記号「ωS」を本実施形態でも用いているが、本実施形態におけるωSは、図39の電力系統340の交流電圧の角周波数とは無関係であるとする。
与えられた三相電圧指令値(vu *、vv *及びvw *)に基づくインバータ302の動作は、第2実施形態におけるそれと同じである。但し、図44の三相負荷駆動システムにおいては、三相電圧指令値(vu *、vv *及びvw *)が制御部503から与えられる。
制御部503は、符号551〜554にて参照される各部位を含む。制御部503内では、第2実施形態のP軸及びQ軸に対応するX軸及びY軸が定義される。尚、本実施形態において記述される記号「X」は、第1実施形態の第4実施例で記述される同記号とは別のものを指す。
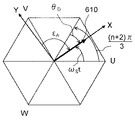
図45は、固定軸であるU相軸、V相軸及びW相軸と、回転軸であるX軸及びY軸と、の関係を表す空間ベクトル図である。V相軸の位相は、U相軸を基準として電気角で120度だけ進んでおり、W相軸の位相は、V相軸を基準として更に電気角で120度だけ進んでいる。X軸の回転における角周波数(角速度)はωSである。符号610は、本実施形態におけるインバータ302の出力電圧の電圧ベクトルを表す。
X軸の向きは、電圧ベクトル610の向きと同じとされる(故に、電圧ベクトル610はX軸上にのることになる)。そして、X軸から電気角で90度進んだ位相にY軸をとり、X軸及びY軸を座標軸に選んだ座標をXY座標と呼ぶ。また、本実施形態では、U相軸とX軸が一致する時点からの経過時間をtで表し、U相軸から見たX軸の位相をωStにて表し(t=0の時、U相軸とX軸は一致する)、Y軸から見た電圧ベクトル610の位相をεAにて表す。図45において、半時計回り方向を位相の進み方向と考え、εA<0とする。そうすると、U相軸を基準とした電圧ベクトル610の位相は、(ωSt+εA+π/2)=ωSt、にて表される。
電圧ベクトル610は、U相電圧vu、V相電圧vv及びW相電圧vwの合成電圧を二次元座標面上のベクトル量として捉えたものであり、電圧ベクトル610のU相軸成分、V相軸成分及びW相軸成分が、vu、vv及びvwに相当する。また、XY座標に着目すれば、電圧ベクトル610をX軸成分とY軸成分に分解することができる。電圧ベクトル610のX軸成分とY軸成分を、それぞれX軸電圧vX及びY軸電圧vYで表す。実際には、制御部503内においてX軸電圧指令値vX*及びY軸電圧指令値vY*が算出され、vX*及びvY*によって電圧ベクトル610が表される。このため、符号610に対応する電圧ベクトルは、電圧指令ベクトルとも読み替えられる。
図41の領域411と同等の、U相軸近傍、V相軸近傍及びW相軸近傍の領域は、U相軸を基準として電気角で60度ごとに存在する。このため、第1実施形態と同様の考え方にて、第1実施形態と同様の、電気角60度ごとにステップ的に回転するab座標を定義することができる(尚、XY座標は連続的に回転する座標である)。具体的には、第1実施形態における図8の電圧ベクトル110及び電圧ベクトル110の位相(θ+ε+π/2)を、電圧ベクトル610及び電圧ベクトル610の位相(ωSt+εA+π/2)に読み替えた上で、第1実施形態で述べたab座標の定義を本実施形態にも適用すればよい(図8及び図9参照)。この結果、a軸は、電圧ベクトル610の位相(ωSt+εA+π/2)に応じて、電気角60度ごとにステップ的に回転し、b軸も、a軸と直交しつつa軸と共に60度ごとにステップ的に回転することになる。尚、図45に示されるθD及び(n+2)π/3は、第2実施形態と同様に定義される角度量である(図43参照)。
図44に示される各部位の動作の説明を行う。電流センサ305は、インバータ302の母線313に流れる母線電流を検出する。検出された母線電流(検出電流)の電流値を表す信号は、電流検出部551に伝達される。電流検出部551は、図19の電流検出部21と同様の動作を行う。即ち、電圧指令処理部553が出力する三相電圧指令値vu *、vv *及びvw *を参照して、何れの相が最大相、中間相及び最小相であるかを特定すると共に電流センサ305の出力信号をサンプリングするタイミングST1及びST2(図6参照)を決定し、そのタイミングにおいて得た母線電流の電流値からU相電流iu、V相電流iv及びW相電流iwを算出及び出力する。この際、必要に応じて、iu+iv+iw=0、の関係式を用いる。
検出電流処理部552は、電流検出部551から出力されたiu、iv及びiwに基づいた所定の処理を行う。例えば、iu、iv及びiwが異常に大きくなっていないか(即ち、インバータ302の出力電流が過電流となっていないか)を検出し、その検出結果に応じた保護動作を行う。
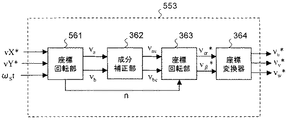
電圧指令処理部553の機能及び内部構成は、図42の電圧指令処理部356のそれらと同様であり、電圧指令処理部356に対する「P軸、Q軸及び電圧ベクトル410」を「X軸、Y軸及び電圧ベクトル610」に置き換えて構成したものが電圧指令処理部553となる(図42、図43及び図45参照)。電圧指令処理部553の内部ブロック図を、図46に示す。図46の電圧指令処理部553は、符号561及び362〜364にて参照される各部位を備える。図42の電圧指令処理部356に対して説明した手法は、電圧指令処理部553にも適用される。
座標回転部561は、与えられたvX*及びvX*並びにωStに基づき、上記式(1−3)の変形式に従って、vX*及びvY*をva及びvbに変換する。つまり、vX*及びvY*によって表される、XY座標上の2相の電圧指令ベクトルを、va及びvaによって表される、ab座標上の2相の電圧指令ベクトルに変換する。上記式(1−3)の変形式とは、式(1−3)におけるvd及びvqをvX*及びvY*に置換することによって得られる式を指す。
電圧指令処理部553における成分補正部362、座標回転部363及び座標変換器364の動作は、図42のそれらと同様であるため重複する説明を割愛する。但し、成分補正部362へのva及びvbは、座標回転部561から得られる。座標変換器364は、算出した三相電圧指令値(vu *、vv *及びvw *)をインバータ302及び電流検出部551に与える。
電圧指令処理部553に与えられるvX*及びvY*は、夫々、X軸電圧vXが追従すべきX軸電圧指令値及びY軸電圧vYが追従すべきY軸電圧指令値を表し、それらは電圧決定部554から出力される。図45に示したように、電圧ベクトル610はX軸上にあるためvY*はゼロとされ、三相負荷に供給したい所望電力値に応じた値がvX*に代入される。第1実施形態ではd軸とU相軸に一致する時点がモータの回転子位置に依存し、第2実施形態ではP軸とU相軸に一致する時点が系統側の交流電圧の位相に依存するが、第3実施形態ではそのような依存は存在しないため、t=0の時点を自由に定めることができる。ωSについても同様である。
このように、第1実施形態で述べた補正手法を三相負荷駆動システムに適用することが可能であり、これによって第1実施形態と同様の効果を得ることが可能である。即ち例えば、補正の簡素化や補正量の決定の容易化が図られる。
以下に、各実施形態(特に、第2及び第3実施形態)に対する変形例などを記述する。
第2及び第3実施形態において、現時点が属するモードの特定手法及びタイミングST1及びST2の決定手法(図6参照)として、第1実施形態で述べた任意の手法(即ち、第1実施形態における第1〜第3実施例に記載の手法の何れか)を用いることができる。
また、第2又は第3実施形態において、成分補正部362(図42、図46参照)にて算出されたvac及びvbcを、上記式(1−8)及び(1−9)に従って、αβ座標を介することなく、vu *、vv *及びvw *に変換するようにしてもよい。この際、式(1−8)及び(1−9)におけるva及びvb並びにvu、vv及びvwとして、vac及びvbc並びにvu *、vv *及びvw *が用いられる。尚、この場合、座標回転部363は不要となる。
また、第2又は第3実施形態において、制御部(303又は503)の機能の一部または全部は、例えば汎用マイクロコンピュータ等に組み込まれたソフトウェア(プログラム)を用いて実現される。ソフトウェアを用いて制御部(303又は503)を実現する場合、制御部(303又は503)の各部の構成を示すブロック図は機能ブロック図を表すこととなる。勿論、ソフトウェア(プログラム)ではなく、ハードウェアのみによって制御部(303又は503)を構成しても構わない。
第1、第2又は第3実施形態において、上述の各種の指令値(vd *及びvq *、vP*及びvQ*並びにvX*及びvY*等)やその他の状態量(ε、εA等)を含む、導出されるべき全ての値の導出手法は任意である。即ち、例えば、それらを、制御部(3、303又は503)内での演算によって導出するようにしてもよいし、予め設定しておいたテーブルデータから導出するようにしてもよい。
また例えば、以下のように考えることができる。
第2実施形態において、図40の系統連系システムは電流検出ユニットを備え、この電流検出ユニットは、電流検出部351、有効電流制御部354、無効電流制御部355及び電圧指令処理部356を含み、更に電流センサ305をも含みうる。そして例えば、図40の有効電流制御部354及び無効電流制御部355と図42の座標回転部361は、電圧指令ベクトル作成手段として機能し、図42の成分補正部362は、電圧指令ベクトル補正手段として機能する。また例えば、第2実施形態に係る制御部303は、インバータ制御装置(又は電流制御装置若しくは電力制御装置)として機能し、そのインバータ制御装置に電流検出ユニットは内包される。また例えば、図40の系統連系システムは系統連系装置を含み、該系統連系装置はインバータ302及び制御部303を含む。該系統連系装置が、更に、直流電源としての太陽電池304、電流センサ305、電圧検出器306及び平滑化コンデンサCdの一部又は全部を含むと考えることもできる。
第3実施形態において、図44の三相負荷駆動システムは電流検出ユニットを備え、この電流検出ユニットは、電流検出部551、電圧決定部554及び電圧指令処理部553を含み、更に電流センサ305をも含みうる。そして例えば、図44の電圧決定部554と図46の座標回転部561は、電圧指令ベクトル作成手段として機能し、図46の成分補正部362は、電圧指令ベクトル補正手段として機能する。第3実施形態に係る制御部503をインバータ制御装置と捉えることも可能であるが、該インバータ制御装置は、電流検出部551の検出結果に基づいて電圧指令ベクトルを作成するわけではない。
電流検出ユニットは、第1実施形態におけるモータ駆動システムにも内在していると考えることが可能である。第1実施形態に係る電流検出ユニットは、図19等に示される電流検出部21、21a又は21cと、図19等に示される電圧演算部23と、図19等に示される電圧ベクトル補正部24、24a、24b又は24cと、を含み、更に電流センサ5及び/又は図19等に示される座標変換器25を含みうる。
尚、本明細書では、記述の簡略化上、記号(iγなど)のみの表記によって、その記号に対応する状態量(状態変数)などを表現している場合もある。即ち、本明細書では、例えば、「iγ」と「γ軸電流iγ」は同じものを指す。
また、本明細書等において下記の点に留意すべきである。上記の数m(mは1以上の整数)と表記した墨付きかっこ内の式(式(1−7)等)の記述又は図面において、所謂下付き文字として表現されているα、β、γ及びδ(等)は、それらの墨付きかっこ外において、下付き文字でない標準文字として表記されうる。このγ及びδの下付き文字と標準文字との相違は無視されるべきである。