JP4468401B2 - 医療用マニピュレータ - Google Patents
医療用マニピュレータ Download PDFInfo
- Publication number
- JP4468401B2 JP4468401B2 JP2007109607A JP2007109607A JP4468401B2 JP 4468401 B2 JP4468401 B2 JP 4468401B2 JP 2007109607 A JP2007109607 A JP 2007109607A JP 2007109607 A JP2007109607 A JP 2007109607A JP 4468401 B2 JP4468401 B2 JP 4468401B2
- Authority
- JP
- Japan
- Prior art keywords
- cleaning
- medical manipulator
- manipulator according
- medical
- channel
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Lifetime
Links
Images

















Landscapes
- Manipulator (AREA)
Description
本発明は、医療用マニピュレータ等の医療用器具に関し、特に内部に複雑な構造を有し、洗浄や滅菌が必要なものに関する。
胆のう摘出手術等の腹腔鏡下手術においては、患者の腹部に小さな穴をあけ、その部分にトラカールを取り付け、トラカールを介して内視鏡や鉗子を挿入し、術者が内視鏡の映像をモニタで見ながら鉗子を操作して手術を行っている。このような手術方法は開腹を必要としないため患者への負担が少なく、術後の回復や退院までの日数が大幅に低減される。このように腹腔鏡下手術は患者への負担が少ないという点で優れ、適用分野の拡大が期待されものである。
しかしその反面、術者にとっては直接患部が見られない、開閉グリッパしか設けられていない操作性に乏しい鉗子を使用し、必ずしも手術に適したものとはいえず、その上術者の熟練した技術を要するものであった。
そこで、鉗子先端に姿勢の自由度を与え、複数の自由度を持つ操作部(マスタ部)を術者が操作し、複数の自由度を持つ先端の作業部(スレーブ部)が操作部の動きに合わせて動作するマスタスレーブ方式によって腹腔鏡下手術を行うことが研究され導入されている。マスタスレーブ方式の医療用マニピュレータの1つとして、操作部と作業部とが離れたところに位置する遠隔操作型がある。遠隔操作型の医療用マニピュレータは、スレーブアームを患者の側に複数配し、患者から離れた所にあるマスタを操作し、医療用マニピュレータ先端の位置と姿勢を制御するものである。
また、マスタスレーブ方式の医療用マニピュレータ構造として、操作部と作業部が一部の共通軸を持ち簡素なシステムで導入しやすい一体型の医療用マスタスレーブマニピュレータがある(例えば、特許文献1参照)。
先に挙げた遠隔操作型の医療マニピュレータに対して、この一体型の医療用マニピュレータは術者が患者の側に立ち、直接マニピュレータを操作するので、安全性の問題が大幅に軽減する。他にも、電動式ではなく機械式で器具の作業部の自由度を駆動する多自由度鉗子や、電気メスまたは超音波メスであって、それら先端処置部が術者の操作通りに動作する器具等、高機能化の研究が進められ導入されている。
特開2000−350735号公報
上述した医療用器具であると次のような問題があった。すなわち、これらの医療用器具が高機能化、細径化されるとともに、その構造はより複雑になる。このような医療用器具を洗浄する場合、一般に広く使われている超音波洗浄機やウォッシャーディスインフェクタ等の洗浄装置では、これら複雑な構造を有する医療用器具の内部を完全に洗浄することが困難である。細部に溜まった血液や組織片等の汚れが、従来の洗浄方法では十分に落とせないためである。そのため医療機関では、これら複雑化された器具に対し、作業者が丹念にブラッシングし、長時間にわたって中空管内を流水洗浄し、必要ならば器具を一旦分解し、部品毎に洗浄を実施した後、再組み立てを行う必要がある。
このように人手による作業が多く、一般的に確立した方法でないため、洗浄性を必ずしも保障できるものではないのが現状である。さらには、洗浄残しがあると、この後の滅菌過程において滅菌不良の要因ともなる。高機能化され様々な電子機器を内蔵するようになった医療用器具は、高圧蒸気滅菌には耐えることができず、酸化エチレンガス滅菌にて処理されることが多い。しかし医療用器具の構造が複雑化されるとともに、細部にわたって滅菌ガスが行き渡らず滅菌不良が発生しやすくなるといった問題が発生する。これは医療事故にもつながる重大な問題である。
このように、医療機関内で洗浄、滅菌処理を行うだけでは医療用器具を再利用する際に安全性を確保できないと判断される場合、医療用器具はディスポーザブル(使い捨て)医療用器具として扱われることが多い。ディスポーザブル医療用器具は製造過程において洗浄され、梱包後にそのままγ線滅菌されることが多く、洗浄滅菌に関しての安全性は確保される。しかし、高機能化されるとともに医療用器具のコストは増大し、このような医療用器具を使い捨てとして扱うのは不経済であり、さらには、環境的観点からも医療廃棄物の要因となることは好ましくない。
また、医療用器具の構造の複雑化に伴い発生する洗浄不良、滅菌不良の問題を、洗浄装置、洗浄剤、滅菌装置やそれらの方法の改良によって解決しようとする試みもあり一部導入されているが、それらは、すべての医療用器具にわたって十分な洗浄・滅菌能力を示すものとは言えない。
以上述べたように、様々な高機能化された医療用器具が研究導入されつつある中でありながらも、技術面、コスト面から、十分な洗浄性、滅菌性を確保できない環境にあり、その器具の使用において安全性を十分に確保できないといった問題がいまだ残っている。
そこで、本発明は、洗浄性、滅菌性を簡単な構造により確保することで、安全性を向上させることができる医療用器具を提供することを目的としている。
上記課題を解決し目的を達成するために、本発明の医療用マニピュレータは次のように構成されている。
内部に中空部が形成された構造体と、
この構造体に設けられ上記構造体の外側から上記中空部内へ流体を導入するための洗浄ポートと、
上記中空部に形成された第1の凹部を有する軸受部と、
前記第1の凹部の外周部から外側に突き出して形成された第2の凹部を少なくともその一部に有し、上記中空部に設けられ、上記洗浄ポートから流入する流体を前記軸受部に導入する洗浄流路と、
前記軸受部に回転可能に支持された回転部と、
患部に挿入するための処置部と、
前記回転部の動力を前記処置部に伝達するための動力伝達部材と、
前記回転部を回転させるための動力源と、
前記動力源を制御するための制御部と、
前記制御部に制御指令を入力するための入力部と、
を備えていることを特徴とする医療用マニピュレータ。
この構造体に設けられ上記構造体の外側から上記中空部内へ流体を導入するための洗浄ポートと、
上記中空部に形成された第1の凹部を有する軸受部と、
前記第1の凹部の外周部から外側に突き出して形成された第2の凹部を少なくともその一部に有し、上記中空部に設けられ、上記洗浄ポートから流入する流体を前記軸受部に導入する洗浄流路と、
前記軸受部に回転可能に支持された回転部と、
患部に挿入するための処置部と、
前記回転部の動力を前記処置部に伝達するための動力伝達部材と、
前記回転部を回転させるための動力源と、
前記動力源を制御するための制御部と、
前記制御部に制御指令を入力するための入力部と、
を備えていることを特徴とする医療用マニピュレータ。
本発明によれば、洗浄性、滅菌性を簡単な構造により確保することで、安全性を向上させることが可能となる。
図1は本発明の第1の実施の形態に係る医療用マニピュレータシステム100を示す斜視図である。ここでは一体型の医療用マニピュレータを例にとって説明する。医療用マニピュレータシステム100は、マスタスレーブ方式で動作する医療用マニピュレータ(医療用器具)200と、医療用マニピュレータ200を制御駆動させる制御装置300と、術者の指令を入力する指令入力装置400と、医療用マニピュレータ本体200の動作状態を表示する動作状態表示器500とを備えている。
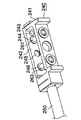
図2及び図3に示すように医療用マニピュレータ200は、分離結合自在に設けられた操作部210及び作業部220を備えている。操作部210は、フレーム211を備えている。フレーム211の一端側には、回転軸P廻りに回動自在に設けられたハンドルフレーム212と、このハンドルフレーム212に回転軸Q廻りに回動自在に設けられた開閉部213とを備えている。フレーム211の他端側には、駆動部214が設けられている。駆動部214には、駆動モータ215〜217が設けられている。操作部210の各回転軸及び開閉部213には、その回転角度及び開閉角度を読み取る角度センサが取り付けられ、術者が操作した角度情報を逐次、制御装置300に送信する。
作業部220は、患部に挿入される処置部230と、軸ケース240と、処置部230と軸ケース240とを連結する連結部250とを備えている。
処置部230には、開閉自在に設けられたグリッパ231と、このグリッパ231をロール方向(矢印S方向)に回動自在に支持するロール方向支持部232と、このロール方向支持部232をヨー方向(矢印Y方向)に回動自在に支持するヨー方向支持部233とを備えている。
軸ケース240及び連結部250内部には、駆動部214の駆動モータ215〜217の駆動力を処置部230に伝達するための動力伝達部260が収容されている。
軸ケース240は、筐体241を備えている。図5において筐体241の一方の壁面が省略されて図示されている。筐体241は、中空部242を備えており、後述するように動力伝達部260の回転軸261〜263が収容されている。さらに筐体241には、筐体241の外部と中空部242とを連通する洗浄ポート243が形成されており、中空部242内を洗浄するための洗浄水が流入させることができる。なお、洗浄ポート243には気密性を保持するために栓によって閉じられている。
中空部242には、軸受部(凹部)244〜246が形成されており、回転軸261〜263の軸受261c〜263cが着脱自在に配置されている。軸受部244〜246には、それぞれ洗浄流路247が形成されており、回転軸261〜263の軸受261c〜263cが取り付けられた状態で洗浄流路247が中空部242側に露出する構成となっている。
動力伝達部260は、図5に示すように、軸ケース240の中空部242に回転自在に配置された回転軸261〜263と、後述するシャフト261a〜263aにそれぞれ掛け渡されたワイヤ264〜266と、これらワイヤ264〜266により作動するギア部267とを備えている。
回転軸261〜263は、シャフト261a〜263a(262aは不図示)と、これらシャフト261a〜263aの一端側に形成され、それぞれ駆動モータ215〜217と噛合せられる噛合部261b〜263b(262bは不図示)と、シャフト261a〜263aの他端側に形成され、軸ケース240の軸受部244〜246に取り付けられる軸受261c〜263c(262cは不図示)とを備えている。
グリッパ231の開閉動作及び姿勢、ロール方向支持部232の回動動作、ヨー方向支持部233と回動動作は、上述した動力伝達部260を介して術者の指令に応じて動作する。
制御装置300は、電源部301、演算部302、モータ駆動回路部303、安全保護装置304、各種スイッチ305,306から構成される。
電源部301は、外部電源からトランスを介して演算部302とモータ駆動回路部303へ必要な電力を供給する機能を有している。演算部302は、CPU、記憶装置、論理回路、インターフェイス等で構成され、操作部210の操作角度を読み取り作業部220を駆動する駆動モータ215〜217の制御目標値を生成する機能と、駆動モータ215〜217の動作角度を測定する角度センサの情報を読み込み駆動モータ215〜217の制御目標値を比較し、その偏差を解消するようにモータ指令入力を算出する機能とを有している。また各種スイッチ305,306等の信号入力を監視し、予め決められたプログラムに沿って制御演算を行う。演算部302は、これらの処理を、予め決められた制御周期に従って繰り返す。
モータ駆動回路303は、演算部302からの指令入力に従って駆動モータ215〜217ヘ電力を出力する回路である。安全保護装置304は、演算部302の演算周期異常、モータ駆動回路異常、緊急停止指令等の異常事態に備えて、医療用マニピュレータ200への電力を遮断し、その動作を直ちに停止させる装置である。各種スイッチ305,306は、制御装置300の筐体に装備され、医療用マニピュレータ200の動作状態の切換指令、電源切換等に使われる。
指令入力装置400は、術者が直接操作することで医療用マニピュレータの動作開始や終了、動作状態の切換等の指令をスムーズに行うための装置であって、通常は手技の阻害とならないようにフットスイッチを用いることが多い。音声入力や医療用マニピュレータ200に装着したスイッチによって行うこともできる。
動作状態表示器500は、医療用マニピュレータ200の動作状態を表示するもので、術者や手術に携わる助手等が操作状態の確認が容易であるようにして手術の安全性を高めるものである。表示結果が術者の視野に違和感無く入りやすいように、内視鏡用モニタ付近に設置されることが多い。
このように構成された医療用マニピュレータシステム100では、次のようにして操作が行われる。すなわち、術者が操作部210を操作することにより、その操作角度が角度センサによって読み込まれ、操作角度が制御装置300によって駆動量が算出さる。この駆動量に基づいて駆動モータ215〜217が作動し、動作伝達部260により駆動力が処置部230を動作させる。
このとき、連結部であるシャフト部分の先が処置部であり、体腔内に挿入され血液等によって直接汚染される部分である。処置部に対して動力を伝えるワイヤやそれを通しているシャフト内を伝って、血液等が軸ケースまで進入してくる。そのため動力軸やベアリングが汚染される。作業部220は気密性が保たれている。これは腹腔鏡下手術が気腹法によって行われることが多いためである。それゆえ処置部230で付着した血液等の汚れは動力伝達部260を介して軸ケース240に伝わってきても作業部220側から流出することはない。洗浄ポート243には気密性を保持するための栓がしてある。
次に、処置後の医療用マニピュレータ200の洗浄方法について詳述する。医療用マニピュレータ200の操作部210と作業部220とを結合分離自在にすることで洗浄性を向上させることができる構成となっている。すなわち、モータやスイッチ、センサ等の電子機器をすべて操作部210側に配し、機械構成部品のみからなる処置部230及び動力伝達部260を作業部220側に配している。
作業部220側は術部に直接接触する部分であり、汚染度の最も高い部分であるが、電子機器が配置されていないため、超音波洗浄装置やウォッシャディスインフェクタ等の洗浄装置で洗浄する際には、洗浄水にそのまま浸かっても問題のない構造となっている。このため、汚染度の度合いと、それにより決まる洗浄方法に対する適合度合いとを一致させた構成とし、それら度合いの違いが生じる部分で分離結合できるようにした構成である。
作業部220は物理的に動力を伝える動力伝達部260が処置部230まで接続されていることが必要なため、連結部250は中空であり、処置部230側は開口している。連結部250内を洗浄するために軸ケース240側に洗浄ポート243を設けて、洗浄水を流すことができるようにしてある。
一方、軸ケース240においては、軸受261c〜263cは外輪と内輪との間のベアリング玉がある部分に空隙があるため、連結部250内を伝ってきた汚染物は軸受261c〜263c側に到達する。軸受261c〜263cは袋小路構造であるが、洗浄流路247が設けられているため、流水を容易に通流させることができる。
なお、図7に比較例として示すように、洗浄流路247が設けられていない軸ケース240の場合には、流水洗浄を行っても効果的な流れが生じず、汚れを落とすことができない。このことは、試作モデルに対して実施した洗浄試験にて実証されている。血液によって汚染した試作モデルをウォッシャディスインフェクタにて洗浄した後に、たんぱく質と反応するアミドブラック溶液にて反応させた結果、3ヶ所の軸受け部分にたんぱく質残存による染色反応が出た。ゆえにこの構造は十分な洗浄性を有していないことが実証された。
これに対し、本実施の形態に係る図5に示す軸ケース240においては、洗浄流路247が設けられているため、効果的に洗浄を行うことができ、染色反応が出ない。
図8は上述した本実施の形態における第1の変形例に係る軸ケース240を示す斜視図である。本第1の変形例においては、軸受部244〜246において洗浄流路247を延ばし、さらに一方の流入出口を設けるようにした。これにより、洗浄流路247を流れる流量を増大させることができ、流水洗浄を効果的に行うことができる。
図9は上述した本実施の形態における第2の変形例に係る軸ケース240を示す斜視図である。本第2の変形例においては、洗浄流路247の向きを変化させたものである。中空部242内の流水の流れ方向を鑑みて最も効果的に汚れを流れ落とすことができる方向に配置する。
図10は上述した実施の形態における第3の変形例に係る軸ケース240を示す斜視図である。通常は洗浄ポート243側から連結部250側に向けて洗浄水は流れるが、軸ケース240の壁部が着脱自在の蓋部248から形成されており、蓋部248を外した開口部から洗浄水を導入するような場合には、図9に示すような洗浄流路247が設けられている方向が効果的に汚れを落とすことができる。なお、筐体241に設けられた蓋受け241aに蓋部248の一端を合わせて嵌め込み、蓋止めネジ248aにより締め付け固定できる。図10中248bはゴム溝、248cはゴムパッキンを示しており、気密性を保つことができる。
このように構成されていると、洗浄時は、蓋部248を外して洗浄水を内部に行き渡らせることが容易になるとともに、洗浄流路247に流水を流しやすくし、乾燥時は、中空部242内部の蒸気が拡散しやすくなることで乾燥不良がなくなり、滅菌時は、滅菌ガスが行き渡りやすくなるので滅菌不良が生じなくなる、エアレーションにおいてガスが残留しなくなる、といった効果が生まれる。この他、汚れが実際に落ちているか否かを視認できるという効果がある。
図11は上述した実施の形態における第4の変形例に係る軸ケース240を示す斜視図である。本第4の変形例においては、各軸受部244〜246に設けられた洗浄流路247が互いに接続され、洗浄ポート243とも連結されている。
本変形例によれば、洗浄流路247と洗浄ポート243とが直結されているので、流入する洗浄水の流水圧を効果的に伝えることができ、より洗浄効果を増大させることができる。
図12は上述した実施の形態における第5の変形例に係る軸ケース240を示す斜視図である。本第5の変形例においては、洗浄流路247とは直交する向きに副洗浄流路249が設けられている。
このように構成されていると、さらに洗浄効果を高めることができる。すなわち、洗浄ポート243は通常、筐体242から突出した形状をしており、洗浄槽内で洗浄ポート243を上方に向けた状態は必ずしも安定した状態とはいえず、図12に示すような向きに置かれることが自然である。このような状態で、軸受部244〜246に溜まった空気を排出するために、さらに副洗浄流路249を鉛直上向きに設けることで、洗浄流路247の一方側から洗浄液が流入してくると、他方側からだけでなく副洗浄流路249からも空気が押し出されるために軸受部244〜246に空気が残ることがなく、洗浄阻害が発生しない。また、副洗浄流路249のように流路を複数用意することで、軸受部244〜246に溜まった汚れをより効率的に流し落とすことができるようになる。
なお、洗浄処理後に行われる、乾燥、滅菌工程においても次の点で有効である。内空構造、袋小路構造は、乾燥されにくい部分である。洗浄後に残った水滴をエアガンで吹き飛ばし乾燥機にかけて処理をする。エアガンでは十分には水滴を飛ばせないが、副洗浄流路249を設けることで袋小路構造部にある水滴を飛ばしやすくする。さらには、袋小路構造部において水滴が残存し乾燥されにくいといったことを発生しにくくする。エアガンで水滴を飛ばさなくとも乾燥機のみの処理で十分乾燥できるようにもなる。滅菌処理においても、使用される滅菌ガスが細部に行き渡りやすくなるとともに、滅菌後のエアレーションにおいてもガスが抜けやすくなるといった効果が生じる。このように、副洗浄流路249は、洗浄時に使用される洗浄液のような液体以外にも、乾燥、滅菌時において流れうる気体の通り道としても効果を発揮するものである。
図13は、洗浄流路247の変形例を示す図である。洗浄流路247を形成する少なくとも一つの面を表面粗さ0.8以下に加工するようにしてもよい。また、洗浄流路247を形成する少なくとも一つの角に丸め加工を施すようにしてもよい。さらに、洗浄流路247を形成する少なくとも一つの面をフッ素樹脂コーティングを施すようにしてもよい。
このように構成されていると、流水が流れやすいこととともに、汚れが付着しにくくなり、洗浄流路247が洗浄不良個所とならない。
この他、洗浄流路247は、筐体241全体と比較すれば狭い流路であるため、流水洗浄のために設けられた洗浄流路が洗浄不良となる要素とならない設計が必要である。このため、洗浄流路247の断面積は可能な範囲で大きいことが望ましい。可能な範囲とは、例えば軸受部244〜246の場合、軸を受けているベアリングの位置や姿勢が軸ケースに対して変動しないような十分な接触面積が必要である。
洗浄流路247によってこの接触面積を減らし過ぎないようにすることが肝心である。洗浄ポート243から離れた位置にある洗浄流路247では洗浄水の流量の減少による流水圧の減少に伴い、洗浄効果が低下することがある。そこで洗浄流路247の断面積を洗浄ポートからの距離に応じて減少させることで流水圧を保持し洗浄効果を維持することができる。これは洗浄ポート243から離れるほどすなわち処置部230に近づくほど断面積が小さくなることによる処置部からの汚れ流入を抑える効果もある。
なお、洗浄ポート243からの距離に応じて洗浄流路247の断面積を変化させるようにしてもよい。洗浄ポートから効率よく流水圧減少を軽減して洗浄水を流すことができ、洗浄効果を低下させることがない。
ここでは、洗浄流路247が熱膨張率(線膨張率)の異なる複数の構成要素で構成される場合について述べる。軸ケース240の材質をPEEK(ポリエーテルエーテルケトン)とし、動力軸の材質をアルミニウムとする。PEEKは耐熱性に優れるため、高圧蒸気滅菌にて処理しても変形しないため医療用器具の材料として用いられることがある。
動力軸及び軸受部244〜246の内径を10mmとする。洗浄時に使われる洗浄水は55℃の温水であることが一般的であるため、洗浄時には常温25℃から55℃まで30℃の温度上昇がある。PEEK、アルミニウムの線膨張率はそれぞれ5.0×10−5、2.3×10−5である。
一般的に、線膨張率をα、温度変化をΔT、元の長さをL0、伸びをΔLとすると次のような関係式がある。ΔL=α×L0×ΔT
PEEK及びアルミニウムそれぞれ10mmの部材は30℃の温度上昇により、
(PEEK)5.0×10−5×10×30=15.0×10−3mm
(アルミニウム)2.3×10−5×10×30=6.9×10−3mm
の伸びが生じる。ゆえに両者間に約8×10−3mmすなわち8μmの隙間ができる。そもそも軸受部244〜246と動力軸との間には、動力軸が回転するための隙間管理と加工精度上の都合で数μmの隙間がある。血液成分のほとんどが大きさ数μmであり、軸受部244〜246の隙間に血液成分が入り込み汚れとして溜まってしまう。
PEEK及びアルミニウムそれぞれ10mmの部材は30℃の温度上昇により、
(PEEK)5.0×10−5×10×30=15.0×10−3mm
(アルミニウム)2.3×10−5×10×30=6.9×10−3mm
の伸びが生じる。ゆえに両者間に約8×10−3mmすなわち8μmの隙間ができる。そもそも軸受部244〜246と動力軸との間には、動力軸が回転するための隙間管理と加工精度上の都合で数μmの隙間がある。血液成分のほとんどが大きさ数μmであり、軸受部244〜246の隙間に血液成分が入り込み汚れとして溜まってしまう。
そこでシャフト261a〜263aと軸受部244〜246の材質を線膨張率を変えることで、洗浄時には温度変化により、上記に述べたように本来の隙間の2倍以上の隙間、すなわち洗浄流路を確保することで、これら隙間に入り込んだ汚れを流れ落ちやすくする。洗浄後再び手術に使用するときは常温下におかれるので、シャフト261a〜263aと軸受部244〜246との隙間管理が回復し、軸ぶれ等が生じず機能が損なわれることがない。洗浄流路の大きさの管理は、材質の線膨張率と洗浄時の周囲温度で行われることから、より洗浄流路を広げて洗浄効果を上げたい場合には、線膨張率の大きい材質を使用すればよい。
例えばアクリルは線膨張率が7.0×10−5であるので、軸ケース240の材質にPEEKを使用するよりアクリルを使用することで洗浄流路が広がる。アクリルは透明な物質であるため、汚れ度合いを目視で確認できる点でも優れている。また、洗浄過程において潤滑剤を混入する方法がとられ、潤滑剤は器具表面や関節軸において潤滑膜を生成する。この膜厚は数μmであり、先に述べたシャフト261a〜263aと軸受部244〜246との間に生じる隙間である洗浄流路においても形成されうる。洗浄流路内で形成された潤滑膜は、器具を使用するときには洗浄流路を埋め、汚れが進入することを防止する働きをする。以上述べたように、医療用器具を線膨張率の異なる材質で構成することで、洗浄時に洗浄流路を生じさせ、洗浄を効果的に実施することができる。
図14は、軸ケース240を模式的に示す図である。図14に示すように、器具内部の中空部分で、鉛直方向で最も高い部分に接続されるように洗浄ポート243を配することで洗浄ポート243から流入する洗浄水を効果的に器具の中空内部に流すことができる。なお、洗浄ポート243は、洗浄水が軸ケース240の中空部242をくまなく流れるように、軸ケース240の一端側に配置される。
図15は、軸ケース240の変形例を模式的に示す図である。洗浄ポート243の口まで洗浄流路247を配し、洗浄ポート243に向けて洗浄流路247の深さを変化させるようにしてもよい。
図16は、軸ケース240の別の変形例を模式的に示す図である。図16に示すように、軸ケース240が置かれたときの姿勢が傾くことを利用し、器具内部の中空部分で、鉛直方向で最も高い部分に接続されるように洗浄ポート243を配した例である。この洗浄ポート243と洗浄流路247(不図示)とを接続すれば効果的な流水洗浄効果が得られる。
さらに、超音波洗浄時に中空部242に溜まった空気が超音波のエネルギの伝播を阻害するため洗浄不良の原因となるが、このようなとき、洗浄ポート243は内部の溜まった空気を排出する出口にも活用することができる。上記に述べたように、中空部242の鉛直最上部または洗浄流路247の鉛直最上部に洗浄ポート243が位置することで、各部に溜まった空気は自ずと洗浄ポート243から排出することができ、さらなる洗浄効果を維持できる。
この他、洗浄流路247それぞれに洗浄ポート243を取り付けるようにしてもよい。また、筐体241全体の構造バランスをふまえて、洗浄ポート243の位置を決定してもよい。
図17は、操作部210と作業部220とが分離できないタイプの医療用マニピュレータ200を示す斜視図である。図17において図2と同一機能部分には同一符号を付した。なお、図17中290はトラカールを示している。このような医療用マニピュレータ200に対しても本発明は適用可能である。
図18は、処置部230に設けられたグリッパ231を示す斜視図である。グリッパ231は、第1のリンク231aと第2のリンク231bの材質がPEEKで形成され、両者の関節である関節軸231cがSUSで形成されている。正確な動作ができるように、リンク231a,231bと関節軸231cとの寸法管理は重要であり、大きな隙間を作ることはできない。しかし、洗浄時においては正確な動作は必要ないため、軸周りに隙間が生じても構わない。
SUSの線膨張率は1.6×10−5であり、リンク231a,231bと関節軸231cとの材質を異なったものにすることで、前述したように数μmの隙間が生じ、これが洗浄流路となって、軸周りに付着した汚れを流し落とすことができる。すなわち、処置部230は最も汚れる部分であり、その関節軸部分は洗浄が困難な部分である。ここで、材質の線膨張率の違いにより洗浄流路を生成することで洗浄効果を高めることができることとなる。
なお、洗浄流路以外でも、線膨張率の違いにより洗浄において効果を発揮する。例えば、医療用器具には構成部品を止めるためのねじが複数配されている。超音波洗浄装置にて器具を洗浄すると、これらねじが振動によって緩み外れてしまうことがある。洗浄槽内で外れたねじは紛失することもあり問題である。
そこでねじの受け側をアルミニウム、ねじをPEEKで構成する。洗浄時の温度変化によりこれらの大きさが変化する。このとき受け側よりもねじの方が広がろうとするので、ねじと受け側との間において締め付け力が増大し、洗浄時の振動によってもねじが外れにくくなる。
なお、上述した一体型の医療用マニピュレータ200について説明したが、連結部が無く操作部と作業部とが離れた箇所に設置され、操作部と作業部とにそれぞれ制御装置が配備され、それらがデータ通信を行うことでマスタスレーブ動作を実現する形式の遠隔操作型の医療用マニピュレータに適用できるのは勿論である。
なお、本発明は上記実施形態そのままに限定されるものではなく、実施段階ではその要旨を逸脱しない範囲で構成要素を変形して具体化できる。また、上記実施形態に開示されている複数の構成要素の適宜な組み合わせにより、種々の発明を形成できる。例えば、実施形態に示される全構成要素から幾つかの構成要素を削除してもよい。さらに、異なる実施形態にわたる構成要素を適宜組み合わせてもよい。
100…医療用マニピュレータシステム、200…医療用マニピュレータ、210…操作部、220…作業部、230…処置部、231…グリッパ、240…軸ケース、241…筐体、242…中空部、243…洗浄ポート、244〜246…軸受部(凹部)、247…洗浄流路、250…連結部、260…動力伝達部、261〜263…回転軸、261a〜263a…シャフト、261c〜263c…軸受、264〜266…ワイヤ、300…制御装置、400…指令入力装置、500…動作状態表示器。
Claims (14)
- 内部に中空部が形成された構造体と、
この構造体に設けられ上記構造体の外側から上記中空部内へ流体を導入するための洗浄ポートと、
上記中空部に形成された第1の凹部を有する軸受部と、
前記第1の凹部の外周部から外側に突き出して形成された第2の凹部を少なくともその一部に有し、上記中空部に設けられ、上記洗浄ポートから流入する流体を前記軸受部に導入する洗浄流路と、
前記軸受部に回転可能に支持された回転部と、
患部に挿入するための処置部と、
前記回転部の動力を前記処置部に伝達するための動力伝達部材と、
前記回転部を回転させるための動力源と、
前記動力源を制御するための制御部と、
前記制御部に制御指令を入力するための入力部と、
を備えていることを特徴とする医療用マニピュレータ。 - 前記軸受部と前記回転部とは、着脱可能に配置されていることを特徴とする請求項1に記載の医療用マニピュレータ。
- 上記洗浄流路の少なくとも一部が上記洗浄ポートと接続されていることを特徴とする請求項1に記載の医療用マニピュレータ。
- 上記構造体内を流れる流体の向きに沿って上記洗浄流路が形成されていることを特徴とする請求項1に記載の医療用マニピュレータ。
- 前記第1および第2の凹部は複数設けられ、少なくとも1組の前記第1および第2の凹部は、上記洗浄流路に接続されていることを特徴とする請求項1に記載の医療用マニピュレータ。
- 上記洗浄流路は、上記洗浄ポートからの距離に応じてその断面積が変化するように形成されていることを特徴とする請求項1に記載の医療用マニピュレータ。
- 上記洗浄流路は、少なくとも1組の前記第1および第2の凹部において分岐する副洗浄流路を有することを特徴とする請求項1に記載の医療用マニピュレータ。
- 上記副洗浄流路の延びる方向は、上記洗浄流路の延びる方向と直交していることを特徴とする請求項7に記載の医療用マニピュレータ。
- 上記洗浄流路を形成する少なくとも1つの角は、丸め加工がなされていることを特徴とする請求項1に記載の医療用マニピュレータ。
- 上記洗浄ポートは、上記構造体を床面に置いた場合に鉛直方向で最も高くなる位置に設けられていることを特徴とする請求項1に記載の医療用マニピュレータ。
- 上記洗浄流路を形成する少なくとも一つの面には、フッ素樹脂コーティングがなされていることを特徴とする請求項1に記載の医療用マニピュレータ。
- 上記構造体は、相異なる複数の材質の部材を組み立てて構成されていることを特徴とする請求項1に記載の医療用マニピュレータ。
- 上記構造体は、上記中空部の壁面を構成する着脱自在のカバー体を具備することを特徴とする請求項1に記載の医療用マニピュレータ。
- 前記第2の凹部は、前記第1の凹部よりも深く形成されたことを特徴とする請求項1に記載の医療用マニピュレータ。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007109607A JP4468401B2 (ja) | 2007-04-18 | 2007-04-18 | 医療用マニピュレータ |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007109607A JP4468401B2 (ja) | 2007-04-18 | 2007-04-18 | 医療用マニピュレータ |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004101130A Division JP4022526B2 (ja) | 2004-03-30 | 2004-03-30 | 医療用器具 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2007229493A JP2007229493A (ja) | 2007-09-13 |
| JP4468401B2 true JP4468401B2 (ja) | 2010-05-26 |
Family
ID=38550631
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2007109607A Expired - Lifetime JP4468401B2 (ja) | 2007-04-18 | 2007-04-18 | 医療用マニピュレータ |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4468401B2 (ja) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2011045499A (ja) * | 2009-08-26 | 2011-03-10 | Terumo Corp | 医療用マニピュレータ |
| US12133775B2 (en) * | 2019-07-09 | 2024-11-05 | Cilag Gmbh International | Adapter for a robotic surgical tool cleaning system |
Family Cites Families (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5792135A (en) * | 1996-05-20 | 1998-08-11 | Intuitive Surgical, Inc. | Articulated surgical instrument for performing minimally invasive surgery with enhanced dexterity and sensitivity |
| JP2001129497A (ja) * | 1999-11-09 | 2001-05-15 | Nsk Ltd | 転がり軸受の洗浄方法 |
-
2007
- 2007-04-18 JP JP2007109607A patent/JP4468401B2/ja not_active Expired - Lifetime
Also Published As
| Publication number | Publication date |
|---|---|
| JP2007229493A (ja) | 2007-09-13 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4022526B2 (ja) | 医療用器具 | |
| JP7405432B2 (ja) | 追跡カメラ技術を有するロボット手術デバイスならびに関連するシステムおよび方法 | |
| JP5608486B2 (ja) | 手術用動力伝達アダプタ及び医療用マニピュレータシステム | |
| JP6878416B2 (ja) | 改善された軟性ロボット内視鏡システム | |
| Shang et al. | A single-port robotic system for transanal microsurgery—Design and validation | |
| KR101207286B1 (ko) | 멸균된 수술용 드레이프 | |
| JP4359563B2 (ja) | 軟性内視鏡を蒸気再処理する装置および方法 | |
| KR20130140095A (ko) | 구동 샤프트에 의해 가동되는 관절식 말단 작동기를 구비한 수술 기구를 위한 시일 및 실링 방법 | |
| US11628029B2 (en) | Surgical drape cooling | |
| JP2011045500A (ja) | 医療用マニピュレータ | |
| JP4441550B2 (ja) | 内視鏡洗滌消毒装置 | |
| JP4468747B2 (ja) | 内視鏡洗滌消毒装置 | |
| US12588922B2 (en) | Sterile barriers and sensor sets for a medical device | |
| WO2013031388A1 (ja) | 内視鏡処理装置 | |
| JP4468401B2 (ja) | 医療用マニピュレータ | |
| JP2011045499A (ja) | 医療用マニピュレータ | |
| US10993779B2 (en) | Method of pre-treating medical instruments | |
| CN114144141A (zh) | 用于机器人外科工具清洁系统的适配器 | |
| US20240225630A1 (en) | Surgical systems and instruments with enhanced cleanability | |
| Pisla et al. | Kinematical analysis and design of a new surgical parallel robot | |
| Wang et al. | Development of visible manipulator with multi-gear array mechanism for laparoscopic surgery | |
| JP2010273978A (ja) | 医療用マニピュレータ | |
| CN120585474A (zh) | 手术器械、从操作设备及手术机器人 | |
| CN120641056A (zh) | 医疗器械 | |
| CH707372B1 (it) | Dispositivo per trattamenti di resezione/rimozione endoscopica dei tessuti. |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20100126 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20100224 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130305 Year of fee payment: 3 |