JP4485267B2 - 電子部品装着装置及び電子部品装着方法 - Google Patents
電子部品装着装置及び電子部品装着方法 Download PDFInfo
- Publication number
- JP4485267B2 JP4485267B2 JP2004187599A JP2004187599A JP4485267B2 JP 4485267 B2 JP4485267 B2 JP 4485267B2 JP 2004187599 A JP2004187599 A JP 2004187599A JP 2004187599 A JP2004187599 A JP 2004187599A JP 4485267 B2 JP4485267 B2 JP 4485267B2
- Authority
- JP
- Japan
- Prior art keywords
- electronic component
- drive motor
- mounting
- motor
- component
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images



Landscapes
- Supply And Installment Of Electrical Components (AREA)
Description
9 供給台駆動モータ
28、29 駆動回路
30 インデックスモータ
33 CPU
34 RAM
Claims (2)
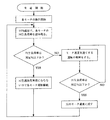
- 装着ヘッドに設けられた吸着ノズルにより部品供給ユニットから電子部品を取出して、該電子部品をプリント基板上に装着する電子部品装着装置において、前記吸着ヘッドを移動させる手段の駆動モータを駆動させるための駆動回路と、この駆動回路から前記駆動モータの回生負荷率を読取って一定基準に達したか否かを判断する判断手段と、この判断手段が一定基準に達したものと判断した場合に前記駆動モータの最高速度を一定の速度に落とすように制御する制御手段とを設けたことを特徴とする電子部品装着装置。
- 装着ヘッドに設けられた吸着ノズルにより部品供給ユニットから電子部品を取出して、該電子部品をプリント基板上に装着する電子部品装着方法において、
前記吸着ヘッドを移動させる手段の駆動モータを駆動させるための駆動回路から前記駆動モータの回生負荷率を読取って一定基準に達したか否かを判断手段が判断し、
この判断手段が一定基準に達したものと判断した場合に前記駆動モータの最高速度を一定の速度に落とすように制御手段が制御することを特徴とする電子部品装着方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004187599A JP4485267B2 (ja) | 2004-06-25 | 2004-06-25 | 電子部品装着装置及び電子部品装着方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004187599A JP4485267B2 (ja) | 2004-06-25 | 2004-06-25 | 電子部品装着装置及び電子部品装着方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2006013113A JP2006013113A (ja) | 2006-01-12 |
| JP4485267B2 true JP4485267B2 (ja) | 2010-06-16 |
Family
ID=35779986
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004187599A Expired - Fee Related JP4485267B2 (ja) | 2004-06-25 | 2004-06-25 | 電子部品装着装置及び電子部品装着方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4485267B2 (ja) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20110088530A (ko) * | 2008-11-28 | 2011-08-03 | 파나소닉 주식회사 | 전력 감시 장치, 전력 감시 방법 및 부품 실장용 장치 |
| JP5488427B2 (ja) * | 2010-11-26 | 2014-05-14 | パナソニック株式会社 | 部品実装装置および部品実装装置におけるモータ制御方法 |
| JP5440480B2 (ja) * | 2010-11-26 | 2014-03-12 | パナソニック株式会社 | 部品実装装置および部品実装装置におけるモータ制御方法 |
| JP7080344B2 (ja) * | 2018-12-07 | 2022-06-03 | 株式会社Fuji | ユニット管理装置およびユニット管理方法 |
-
2004
- 2004-06-25 JP JP2004187599A patent/JP4485267B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2006013113A (ja) | 2006-01-12 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP3624145B2 (ja) | 電子部品装着装置 | |
| JP4465401B2 (ja) | 基板停止位置制御方法および装置 | |
| CN1622739A (zh) | 表面安装机的元件准备方法及表面安装机 | |
| CN100525602C (zh) | 电子元件安装系统及电子元件安装方法 | |
| JP4769232B2 (ja) | 実装機および部品吸着装置 | |
| JPH10150294A (ja) | 実装方法及び同装置 | |
| JP4485267B2 (ja) | 電子部品装着装置及び電子部品装着方法 | |
| JP6476196B2 (ja) | メンテナンス案内システム及びメンテナンス案内方法 | |
| JP3545108B2 (ja) | 電子部品自動装着装置及び装着方法 | |
| JP4850751B2 (ja) | 表面実装機 | |
| JP4781945B2 (ja) | 基板処理方法および部品実装システム | |
| JP4357931B2 (ja) | 部品実装機 | |
| JP4386391B2 (ja) | 表面実装機 | |
| JP2004363634A (ja) | 電子部品装着装置 | |
| JP2005051064A (ja) | 部品搭載装置 | |
| JP7195914B2 (ja) | 部品実装システム | |
| JP4381568B2 (ja) | 部品実装システムにおける基板認識方法及び同装置 | |
| JP2008053381A (ja) | テープフィーダおよび実装機 | |
| JP4339141B2 (ja) | 表面実装機 | |
| JP4405848B2 (ja) | 電子部品装着方法及び電子部品装着装置 | |
| JP7826233B2 (ja) | 部品実装システム | |
| JP3133582B2 (ja) | 電子部品自動装着装置 | |
| JP3308228B2 (ja) | 表面実装機の部品認識装置 | |
| JPH08172296A (ja) | 電子部品自動装着装置及び電子部品の装着方法 | |
| JP2000022400A (ja) | 表面実装機 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20070530 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20090910 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20090916 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20091116 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20100223 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20100324 |
|
| R150 | Certificate of patent (=grant) or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (prs date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130402 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (prs date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130402 Year of fee payment: 3 |
|
| LAPS | Cancellation because of no payment of annual fees |