JP4514112B2 - 単軸ロボット - Google Patents
単軸ロボット Download PDFInfo
- Publication number
- JP4514112B2 JP4514112B2 JP2004181385A JP2004181385A JP4514112B2 JP 4514112 B2 JP4514112 B2 JP 4514112B2 JP 2004181385 A JP2004181385 A JP 2004181385A JP 2004181385 A JP2004181385 A JP 2004181385A JP 4514112 B2 JP4514112 B2 JP 4514112B2
- Authority
- JP
- Japan
- Prior art keywords
- slider
- coil
- axis robot
- case
- slider body
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images













Landscapes
- Linear Motors (AREA)
- Manipulator (AREA)
Description
従来の単軸ロボットに用いるスライダは、例えば図14に示すように形成されている。図14において、符号1で示すものは、従来の単軸ロボット用スライダの本体部分を示す。このスライダ本体1は、アルミニウム合金によって所定の形状に成形されたもので、上端部に前記ステージ(図示せず)を取付けるための取付座2が形成されるとともに、中心部に断面円形の貫通穴3が穿設されている。この貫通穴3の内部には、リニアモータ用のコイル4が接着されている。
なお、本出願人は、本明細書に記載した先行技術文献情報で特定される先行技術文献以外には、本発明に密接に関連する先行技術文献を出願時までに見付け出すことはできなかった。
本発明に係る単軸ロボットにおいては、スライダのフィンと、スライダにおける前記フィンの基部に隣接する壁部分とのうち、渦電流が発生し易いのは前記壁部分である。この壁部分は、ステータとの距離が相対的に長くなるから、この壁部分内で発生する渦電流は小さくなる。
したがって、本発明に係る単軸ロボットは、スライダで渦電流が発生することがないか、発生したとしても小さく抑えることができることから高性能で、しかもコイルを充分に冷却することができる。
このため、スライダ本体に伝達されたコイルの熱がスライダ本体の外に効率よく放熱されるようになる。
以下、本発明に係る単軸ロボットの一実施の形態を図1ないし図10によって詳細に説明する。
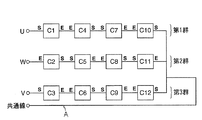
図1は本発明に係る単軸ロボットの平面図、図2は同じく側面図、図3は単軸ロボットの要部を拡大して示す断面図である。図4はスライダの断面図、図5はスライダ本体とシール部材との接続部分を示す断面図、図6はシール部材を示す図で、同図(a)は正面図、同図(b)は底面図である。図7はスライダ本体を示す図で、同図(a)は正面図、同図(b)は側面図、同図(c)は底面図、同図(d)は(b)図におけるD−D線断面図、同図(e)は(b)図におけるE−E線断面図である。図8はスライダのステータ貫通部を拡大して示す断面図、図9はコイルの結線図、図10はスライダの組立方法を説明するための斜視図である。
前記前壁部材33は、図3に示すように、前記ステータ22の前端部を支持し、前記後壁部材は、図示してはいないが、前記ステータ22の後端部を支持している。
スライダ本体51にコイル21を装着するためには、先ず、図10(a)に示すように、断面円形のロッド71とストッパー72とからなる治具73に円筒状の絶縁フィルム74を嵌合させ、次いで、同図(b)に示すように、前記絶縁フィルム74の外周面に前記一方のシール部材59を嵌合させる。前記絶縁フィルム74は、ロッド71が後述するコイル21に接着することを防ぐためのものである。この状態で、シール部材59と絶縁フィルム74の境界部分に液状のシール剤を塗布しておく。このシール剤としては、例えばエポキシ樹脂54と同等の材料やあるいはシリコン系樹脂を主成分とする材料のものを使用する。
このようにエポキシ樹脂54をスライダ本体51内に注入した後、この熱硬化性のエポキシ樹脂54を硬化させるために、スライダ本体51を加熱炉(図示せず)などに装填する。そして、前記エポキシ樹脂54を加熱して硬化させ、冷却後に前記治具73をスライダ本体51側から引抜いて取外す。このように治具73を取外した後、樹脂ベアリング66を両シール部材59に取付けることによって、スライダ本体51が完成する。このスライダ本体51は、前記ステージ52が取付けられた後に前記ステータ22が挿通され、このステータ22とともにケース12に装着される。
コイル21の熱の大部分は、エポキシ樹脂54を介してスライダ本体51に伝導され、このスライダ本体51内を内側から外側へ伝導した後にスライダ本体51の外表面からケース12内に放散する。この実施の形態によるスライダ本体51は、内面に複数のフィン61が突設されているから、フィンが設けられていない場合に較べるとエポキシ樹脂54と接する部位の表面積が増大する。
したがって、この実施の形態による単軸ロボット11は、スライダ14(スライダ本体51)で渦電流が発生することがないか、発生したとしても小さく抑えることができる。
本発明に係る単軸ロボットは図11ないし図13に示すように構成することができる。
図11は単軸ロボットの他の実施の形態を示す縦断面図、図12はスライダの横断面図、図13はスライダ本体を示す図で、同図(a)は平面図、同図(b)は側面図、同図(c)は背面図、同図(d)は(b)図におけるD−D線断面図、同図(e)は(b)図におけるE−E線断面図である。これらの図において、前記図1〜図10によって説明したものと同一もしくは同等の部材については、同一符号を付し詳細な説明を適宜省略する。
この実施の形態で示したようにスライダ14を構成しても第1の実施の形態を採る場合と同等の効果を奏する。
Claims (5)
- リニアガイドと、このリニアガイドと同一方向に配置された棒状のステータと、この棒状のステータが貫通するコイルと、このコイルを内蔵しリニアガイドに往復動自在に支持されたスライダ本体とを備え、このスライダ本体の内面と前記コイルとの間に含浸させた合成樹脂によって前記コイルと前記スライダ本体とを一体化して構成されるスライダが、前記コイルと棒状のステータからなる可動コイル形リニアモータにより往復駆動される単軸ロボットにおいて、
前記コイルは、前記ステータの軸線方向から見て外縁が円形に形成され、
前記スライダ本体の内面に複数のフィンを突設してなり、
前記複数のフィンの先端部は、前記軸線方向から見て前記コイルの外周に沿う円弧状に所定の間隔をおいて並んでいることを特徴とする単軸ロボット。 - 請求項1記載の単軸ロボットにおいて、フィンをコイルの中心部を指向しかつスライダの移動方向に延びるように形成してなる単軸ロボット。
- 請求項1または請求項2記載の単軸ロボットにおいて、リニアガイドと前記棒状のステータを開口を設けたケース内に収納し、前記開口に外方からこの開口を塞ぐ可撓性のシャッターを設け、前記スライダに前記シャッターを開口から外方に遊離させるガイド部を設けることにより前記スライダを前記シャッターの開口からの遊離部と前記ケースとの開放空間を介してケース内からケース外に延在させるようにしたことを特徴とする単軸ロボット。
- 請求項3記載の単軸ロボットにおいて、前記ケースの内部空間を前記スライダによって二つに仕切るとともに、前記スライダ本体の外面にスライダの移動方向に延びるフィンを突設してなる単軸ロボット。
- 請求項4記載の単軸ロボットにおいて、ケース内の二つの空間のうち少なくとも一方の空間をケースの外に連通させてなる単軸ロボット。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004181385A JP4514112B2 (ja) | 2004-06-18 | 2004-06-18 | 単軸ロボット |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004181385A JP4514112B2 (ja) | 2004-06-18 | 2004-06-18 | 単軸ロボット |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2006006058A JP2006006058A (ja) | 2006-01-05 |
| JP4514112B2 true JP4514112B2 (ja) | 2010-07-28 |
Family
ID=35773982
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004181385A Expired - Fee Related JP4514112B2 (ja) | 2004-06-18 | 2004-06-18 | 単軸ロボット |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4514112B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3183801A4 (en) * | 2014-08-22 | 2018-04-18 | Anca Pty Ltd | Linear motor |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009159752A (ja) * | 2007-12-27 | 2009-07-16 | Yaskawa Electric Corp | リニアモータおよび製造方法 |
| CN104104208A (zh) * | 2013-04-08 | 2014-10-15 | 台达电子工业股份有限公司 | 轴式线性马达 |
| TWI487250B (zh) * | 2013-04-08 | 2015-06-01 | Delta Electronics Inc | 軸式線性馬達 |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH11206099A (ja) * | 1997-12-29 | 1999-07-30 | Minolta Co Ltd | シャフト型リニアモータ |
| JP2003052142A (ja) * | 2001-08-03 | 2003-02-21 | Matsushita Electric Ind Co Ltd | 電動機 |
| JP4027120B2 (ja) * | 2002-02-28 | 2007-12-26 | ヤマハ発動機株式会社 | 移動体システム |
| JP2003324934A (ja) * | 2002-04-26 | 2003-11-14 | Tokico Ltd | リニアモータ |
| JP2004129316A (ja) * | 2002-09-30 | 2004-04-22 | Thk Co Ltd | リニアモータアクチュエータ |
-
2004
- 2004-06-18 JP JP2004181385A patent/JP4514112B2/ja not_active Expired - Fee Related
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3183801A4 (en) * | 2014-08-22 | 2018-04-18 | Anca Pty Ltd | Linear motor |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2006006058A (ja) | 2006-01-05 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP1544988B1 (en) | Coreless linear motor | |
| US9893588B2 (en) | Motor housing with cooling channel and resin injected winding ends for improved heat transfer | |
| JP6029189B2 (ja) | 部品実装機用のリニアモータ装置 | |
| JP4524803B2 (ja) | キャンド・リニアモータ電機子およびキャンド・リニアモータ | |
| US20190082917A1 (en) | Motor, blower, and vacuum cleaner | |
| US20140292110A1 (en) | Linear motor | |
| US20080245508A1 (en) | Assembly of linear motor cooling parts | |
| TWI642260B (zh) | Linear motor, voice coil motor, stage device | |
| KR20150064129A (ko) | 실질적으로 일체로 형성된 냉각수 채널 및 외부 슬리브를 갖는 하우징을 포함하는 전기 머신 | |
| CN110676955B (zh) | 带有与定子凹槽间隔开的电导体的电动马达 | |
| CN102187555A (zh) | 具有冷却装置的直线电机线圈组装体 | |
| JP4514114B2 (ja) | コイル可動形リニアモータおよび単軸ロボット | |
| JP4514112B2 (ja) | 単軸ロボット | |
| JP4517278B2 (ja) | コアレスリニアモータおよびキャンド・リニアモータ | |
| JP2003309963A (ja) | リニアスライダの冷却装置 | |
| JP4514113B2 (ja) | コイル可動形リニアモータ、単軸ロボット、コイル可動形リニアモータ用コイル保持部材の製造方法および単軸ロボットの製造方法 | |
| JP5901743B2 (ja) | リニアモータ装置 | |
| JPH1127927A (ja) | リニアモータ | |
| US7939973B2 (en) | Canned linear motor armature and canned linear motor | |
| JP2010161838A (ja) | リニアモータ及びリニア移動ステージ装置 | |
| JP4656306B2 (ja) | キャンド・リニアモータ電機子およびキャンド・リニアモータ | |
| JP4706119B2 (ja) | キャンド・リニアモータ電機子およびキャンド・リニアモータ | |
| JP2007336765A (ja) | 冷媒冷却リニアモータ電機子および冷媒冷却リニアモータ | |
| CN110741540A (zh) | 电动机、压缩机、空气调节机及电动机的制造方法 | |
| JP4048557B2 (ja) | リニアモータの冷却装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20070523 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20100119 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20100202 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100324 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20100506 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20100507 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4514112 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130521 Year of fee payment: 3 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |