JP4533582B2 - 量子効率変調を用いたcmosコンパチブルの三次元イメージセンシングのためのシステム - Google Patents
量子効率変調を用いたcmosコンパチブルの三次元イメージセンシングのためのシステム Download PDFInfo
- Publication number
- JP4533582B2 JP4533582B2 JP2002550710A JP2002550710A JP4533582B2 JP 4533582 B2 JP4533582 B2 JP 4533582B2 JP 2002550710 A JP2002550710 A JP 2002550710A JP 2002550710 A JP2002550710 A JP 2002550710A JP 4533582 B2 JP4533582 B2 JP 4533582B2
- Authority
- JP
- Japan
- Prior art keywords
- semiconductor
- photodetector
- light energy
- integrated circuit
- photodetectors
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Lifetime
Links
Images





























Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/48—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S17/00
- G01S7/491—Details of non-pulse systems
- G01S7/4912—Receivers
- G01S7/4915—Time delay measurement, e.g. operational details for pixel components; Phase measurement
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/02—Systems using the reflection of electromagnetic waves other than radio waves
- G01S17/06—Systems determining position data of a target
- G01S17/08—Systems determining position data of a target for measuring distance only
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/02—Systems using the reflection of electromagnetic waves other than radio waves
- G01S17/06—Systems determining position data of a target
- G01S17/08—Systems determining position data of a target for measuring distance only
- G01S17/32—Systems determining position data of a target for measuring distance only using transmission of continuous waves, whether amplitude-, frequency-, or phase-modulated, or unmodulated
- G01S17/36—Systems determining position data of a target for measuring distance only using transmission of continuous waves, whether amplitude-, frequency-, or phase-modulated, or unmodulated with phase comparison between the received signal and the contemporaneously transmitted signal
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/88—Lidar systems specially adapted for specific applications
- G01S17/89—Lidar systems specially adapted for specific applications for mapping or imaging
- G01S17/894—Three-dimensional [3D] imaging with simultaneous measurement of time-of-flight at a two-dimensional [2D] array of receiver pixels, e.g. time-of-flight cameras or flash lidar
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/48—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S17/00
- G01S7/491—Details of non-pulse systems
- G01S7/4912—Receivers
- G01S7/4913—Circuits for detection, sampling, integration or read-out
- G01S7/4914—Circuits for detection, sampling, integration or read-out of detector arrays, e.g. charge-transfer gates
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/48—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S17/00
- G01S7/491—Details of non-pulse systems
- G01S7/493—Extracting wanted echo signals
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10F—INORGANIC SEMICONDUCTOR DEVICES SENSITIVE TO INFRARED RADIATION, LIGHT, ELECTROMAGNETIC RADIATION OF SHORTER WAVELENGTH OR CORPUSCULAR RADIATION
- H10F39/00—Integrated devices, or assemblies of multiple devices, comprising at least one element covered by group H10F30/00, e.g. radiation detectors comprising photodiode arrays
- H10F39/10—Integrated devices
- H10F39/12—Image sensors
- H10F39/18—Complementary metal-oxide-semiconductor [CMOS] image sensors; Photodiode array image sensors
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10F—INORGANIC SEMICONDUCTOR DEVICES SENSITIVE TO INFRARED RADIATION, LIGHT, ELECTROMAGNETIC RADIATION OF SHORTER WAVELENGTH OR CORPUSCULAR RADIATION
- H10F39/00—Integrated devices, or assemblies of multiple devices, comprising at least one element covered by group H10F30/00, e.g. radiation detectors comprising photodiode arrays
- H10F39/80—Constructional details of image sensors
- H10F39/803—Pixels having integrated switching, control, storage or amplification elements
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10F—INORGANIC SEMICONDUCTOR DEVICES SENSITIVE TO INFRARED RADIATION, LIGHT, ELECTROMAGNETIC RADIATION OF SHORTER WAVELENGTH OR CORPUSCULAR RADIATION
- H10F39/00—Integrated devices, or assemblies of multiple devices, comprising at least one element covered by group H10F30/00, e.g. radiation detectors comprising photodiode arrays
- H10F39/80—Constructional details of image sensors
- H10F39/806—Optical elements or arrangements associated with the image sensors
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Computer Networks & Wireless Communication (AREA)
- General Physics & Mathematics (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Electromagnetism (AREA)
- Optical Radar Systems And Details Thereof (AREA)
- Measurement Of Optical Distance (AREA)
- Length Measuring Devices By Optical Means (AREA)
Description
出願人の2000年12月11日に出願された同時係属の米国特許仮出願シリアル番号60/254,873、「フォトダイオード量子効率変調を用いたCMOS 3Dマルチ画素センサー」より優先権を主張している。出願人は前記出願を参考し、ここに取り入れる。また、出願人は2001年6月6日に出願された同時係属の米国実用新案出願シリアル番号09/876,373、「削減されたピークエネルギーを用いたCMOSコンパチブルの三次元イメージセンシング」も参考し、ここに取り入れる。
本発明はそのようなシステムを提供するものである。
Φ=2・ω・z/C=2・(2・π・f)・z/C
となる。ここでCは光の速度300,000Km/秒である。したがって、エネルギー発光器から(及び検出器アレイから)の距離zは次のように求められる:
z=Φ・C/2・ω=ΦC/{2・(2・π・f)}
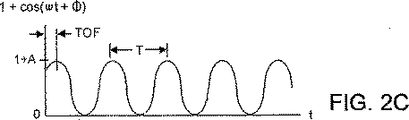
本質的に各ミキサー310は、関連画素検出器240からの増幅された検出出力信号S2をジェネレーター225信号S1とホモダイン検波する。放出光エネルギーが正弦波か余弦波として表現される理想的な高周波成分を持つと仮定すると、ミキサー出力の積S1・S2は、0.5・A・{cos(2・ω・t+φ)+cos(φ)}であり、平均値は0.5・A・cos(φ)である。必要に応じて検出された帰還信号の振幅つまり輝度Aは、各画素検出器出力から別々に測定してもよい。実際には、A・cos(φ)の8ビットのアナログからデジタルへの解像度は、結果としてz測定における約1センチの解像度になる。
飛行時間による位相シフトφは、次のように求めることができる。
φ=2・ω・z/C=2・(2・π・f)・z/C
ここでCは、300,000Km/秒の光の速度である。したがって、エネルギー発光器220からアレイ230中の画素検出器240−xまでの距離zは、次のように求められる。
z=φ・C/2・ω=φ C/{2・(2・π・f)}
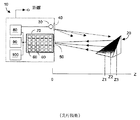
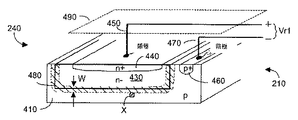
例えば、ターゲット20から反射されたエネルギーのような入射光エネルギーを表しているフォトンは、アレイ230中のフォトダイオード240―xの上に降りかかる。例えば図の中でも図3を参照のこと。フォトンは、これらのフォトダイオードの空乏領域と準中性領域に、電子―正孔ペアを生み出すことができる。これらの電子―正孔ペアは、再結合する前に比較的長い寿命をもつ。空乏領域に正孔のペアを生み出すフォトンは、基板の準中性領域に電子―正孔ペアを生み出すフォトンよりも、フォトン毎の光電流の発生がはるかに高いという効果がある。これは、空乏領域で生成される電子―正孔ペアは電界によって素早く掃引され、結果として生じる光電流に大きく寄与するからである。対照的に準中性領域で生成された電子―正孔ペアは暫くの間そこに留まり、光電流に実質的な寄与はないまま再結合をする可能性が高い。空乏層の幅Wを増加させることで、正孔ペアが生成され光電流に寄与するように素早く掃引されるような領域をより広く提供し、それによりフォトダイオードの量子効率が拡大する。
W=[2ε・(ψ0+VR−VB)]0.5{[qNA・(1+NA/ND)]}-0.5+[qND・(1+ND/NA)]-0.5}
ここで(VR−VB)は、フォトダイオード240の逆バイアス、NAとNdはそれぞれダイオードのn領域及びq領域へのドーピング濃度であり、ψ0=VTIn(NAND/ni 2)であり、ここでVT=kT/q=26mVで、n=1.5・1010cm-3である。

フォトダイオード逆バイアスの変調は、アレイ中のフォトダイオードの検出感度を向上させるためにQEを変化させるメカニズムである。しかしながら、更に効率的なQE変調検出の実施においては、フォトゲート構造を使用する。そのような実施例では、フォトゲートは、フォトダイオード構造のゲートに加えたポテンシャルを変えることによってQEを変調するフォトゲートMOSフォトダイオードとして実施されることが好ましい。
tan(Ψ)=V90/V0
B=√(V0 2+V90 2)
好都合なことに、そして本文に前述した実施例とは対照的に、図10の構成は各エレクトロニクス240−x内に積分器を必要としないので、システムデザインが簡易化される。
図10の構成の更なる効果は、システム動作電力を削減するためにインピーダンスの合ったインダクターを用いることができることである。例えば、フォトダイオード240−xがそれぞれ約15μmの正方形で、約10FFの容量(C)を有すると想定する。また、変調周波数f=ω/(2π)として、fが約1GHzであり、システム200が例えば電池電源などの3VDC電力供給源で動作していると想定する。フォトダイオード画素ごとの電力消費はC・V2・fに比例し、およそ8μWになる。200画素X200画素から成るアレイ230では、電力消費は約0.32Wとなる。
前のとおり、ΔVd=[ΔVd1(τ1)−ΔVd2(τ1)]/[ΔVd3(τ1)−ΔVd4(τ1)]=tan(Φ)となる。
であり、ここで時間τ1で、
ΔVd1=A[1+cos(ωt)]cos(ωt+Φ)
ΔVd1=Acos(ωt+Φ)+0.5A{cos(Φ)+cos(2ωt+Φ)}
また時間τ2で、
ΔVd1=A[1+cos(ωt−120)]cos(ωt+Φ)
ΔVd1=Acos(ωt+Φ)+0.5A{cos(Φ+120)+cos(2ωt+Φ−120)}
ΔVd2=A[1+cos(ωt−240)]cos(ωt+Φ)
ΔVd2=Acos(ωt+Φ)+0.5A[cos(Φ−120)+cos(2ωt+Φ+120)]
であり、
ΔVd=[cos(Φ−120)―cos(Φ+120)]/cos(Φ)
ΔVd=2sin(Φ)sin(120)/cos(Φ)
ΔVd=K1sin(Φ)/cos(Φ)
ΔVd=K1tan(Φ)となる。ここで、K1=√3である。
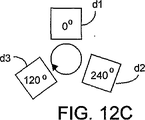
次に図12Cを参照すると、0度−120度−240度の変調(空間的マルチプレクシング)の実施例が示してある。この空間的多重化の実施例は、三つの検出器d1、d2及びd3を用いて測定値を時間τ1において同時に測定を行う以外は、上記の0度−120度−240度の時間分割多重化の実施例と同様である。
ΔVd=[ΔVd3(τ1)―ΔVd2(τ1)]/ΔVd1(τ1)=K1tan(Φ)で、K1=√3となる。
図12Bに関して述べたことからわかるように、図12Cの光検出器を光検出器アレイ230の中の異なる画素全体に渡って共有してもよい。
再び図8Cを参照すると、バンクAの中の各光検出器を、例えば上下左右の四つの画素にわたって共有することができることがわかる。例えば、光検出器の二番目の列において、第一の光検出器Aは隣接する四つの光検出器Bのそれぞれと関連していてもよい。
次のように、全体の測定の処理量を増加させるために、得たデータのフレーム内の測定をインターレースすることができる。
0度−180度の測定: ΔVd(τ1)
90度−270度の測定: ΔVd(τ2)→ΔVd(τ2)]/ΔVd(τ1)=tan(Φ)
0度−180度の測定: ΔVd(τ3)→ΔVd(τ2)]/ΔVd(τ3)=tan(Φ)
0度−270度の測定: ΔVd(τ4)→ΔVd(τ4)]/ΔVd(τ3)=tan(Φ)など。
再度図8Aを参照して、隣り合う二つの光検出器240−(x)(つまり検出器「A」)と光検出器240−(x+1)(つまり検出器「B」)のそれぞれが、平面図で見ると実質的に同一の面積を有すると想定する。これから記述するのは、実際の光検出器の有効面積の差異に関連する影響を含む、これらの光検出器に降りかかる不均一な光量の悪影響を削減し、またこれらの光検出器と共に使用される増幅器の利得に関連する1/fノイズを削減する技術である。
再び図10を参照し、説明を簡単にするため「1+cos」分析を用いて、入射するフォトンエネルギー信号で光検出器Aが見るものをA’{cos(ωt+Φ)+1}とし、入射するフォトンエネルギー信号で光検出器Bが見るものをB’{cos(ωt+Φ)+1}とする。仮にA’=B’であるとすると、均一な光量であるが、それ以外の場合は均一な光量ではない。しかしながら、より一般的なケースではA’とB’は同一にはならない。
先ほどの図10の説明の中では、Kbを輝度係数として、Kb{cos(Φ)}及びKb{sin(Φ)}を得ることがゴールであった。不均一な光量の場合、本発明ではA’(cos(ωt+Φ)+1)に{cos(ωt+180°)+1}を乗じて、積分した後A’(−0.5cos(Φ)+1)を得る。これ以後この式は式{3}と示す。更に、本発明ではまた、B’{cos(ωt+Φ)+1}に{cos(ωt)+1}を乗じて、B’(0.5cos(Φ)+1)を得る。これ以後この式は式{4}と示す
したがって、(式{1}―式{2})に基づいて一つの計算を実行し、(式{3}−式{4})に基づいて同様の計算を実行してもよい。次に図8A、図10、図14A及び図14Bを参照すると、概略的には以下のようにしてその手順を実行することができる。
(1)時間0<t<t1で、例えば0度と180度の変調では、検出器Dつまり240−(x)に信号S1=1+cos(ωt)でバイアスをかけ、検出器240−(x+1)に信号S2=1+cos(ωt+180°)でバイアスをかけ、
(2)それら二つの検出器から出力された信号を時間0<t<t1の間及び時間t=t1の時において蓄積し、差動信号をデジタルまたはアナログの形で保存あるいはサンプルし、
(3)時間t1<t<t2の間、検出器240−(x)に信号S1=1+cos(ωt+180°)でバイアスをかけ、検出器240−(x+1)に信号S2=1+cos(ωt)でバイアスをかけ、
(4)それら二つの検出器からの出力信号を蓄積し、時間t=t2における蓄積の最後に、差動信号をデジタルまたはアナログの形で保存あるいはサンプルし、
(5)差分信号を、サンプルまたは保存されたアナログ及び/またはデジタル信号に対して計算する。
図14Aにおいて、共有される回路構成700はアナログ加算器710を含む。アナログ加算器710のアナログ出力は、アナログ−デジタルコンバーター720によってデジタル化される。図14Bにおいて、共有回路構成は本質的には、その入力がネゲートされているデジタル加算器730である。加算器730からの出力はレジスター740へ入力される。レジスター740の出力は、加算器の入力にフィードバックされる。A/Dコンバーター720は加算器にデジタル入力を提供する。図14Bにおいて、平均値算出はデジタルドメインで行われ、アナログ−デジタル変換は画素の全ての列にわたって共有することができ、これは蓄積した電圧信号を変換のためにADCに送るまで信号をホールドしておくために、画素毎にS/Hが必要となることを意味する。したがって、図14Bのデジタルドメインの実施例での信号の平均値算出には、図14Aのアナログドメインの実施例に比べ2倍の数のA/D変換が必要となる。時間分割マルチプレクシング及び空間的マルチプレクシングを含む、説明してきたその他様々な変調スキームにおいて、同様のアプローチを用いることができることを理解するものである。
Claims (50)
- 少なくとも一つの光検出器と一つのターゲットの間の距離zを測定する方法であって、
(a)前記ターゲットに高周波成分S1(ω・t)を含む変調された周期的な波形を有する光エネルギーを照射するステップと、
(b)前記ターゲットから反射された前記光エネルギーの一部分を一つの集積回路上に隣接して作成された一対の半導体光検出器で差動的に検出するステップと、
(c)前記隣接して作成された一対の半導体光検出器のそれぞれに前記高周波成分S1(ω・t)と同一の変調周波数を有し且つ互いに逆位相の電圧を印加して前記半導体光検出器の空乏領域の幅を変化することによって、前記半導体光検出器の量子効率を変調し、ステップ(a)で放射された光エネルギーとステップ(b)で検出された信号との間での位相変化を測定し、この位相変化から、前記距離zに比例するデータを出力するステップと、
から成り、前記量子効率が、入射フォトン数当りの光電流に寄与した電子−正孔ペアの数である、前記方法。 - 一つの集積回路チップ上に製作された複数の半導体光検出器を更に含む方法であって、
前記集積回路チップがステップ(b)とステップ(c)を実行する回路構成を含むこと
を特徴とする請求項1に記載の該方法。 - 前記半導体光検出器が(i)フォトダイオード検出器、(ii)バイアスゲートの付いたMOS素子及び(iii)フォトゲートの付いたMOS素子のうちのいずれかの形態であることを特徴とする請求項1に記載の方法。
- ステップ(c)が、前記変調された周期的な波形の供給源と結合しており、閉ループで動作している可変位相遅延を用いることを含み、前記可変位相遅延の位相遅延がステップ(b)で検出された信号の位相遅延を示すことを特徴とする請求項1に記載の方法。
- ステップ(c)が少なくとも一つの固定位相遅延を用いることを特徴とする請求項1に記載の方法。
- ステップ(c)が前記半導体光検出器の逆バイアスを変化させることを特徴とする請求項1に記載の方法。
- 前記半導体光検出器がフォトゲート検出器を含み、ステップ(c)が前記フォトゲート検出器のゲートポテンシャルを変化させることを特徴とする請求項1に記載の方法。
- 前記半導体光検出器のバンクを規定することと、
前記半導体光検出器のバンクを異なる位相で変調することにより前記量子効率変調の効率を高めることと、
を更に含むことを特徴とする請求項1に記載の方法。 - 前記半導体光検出器が半導体基板の上に形成され、
ステップ(c)が、反射された前記光エネルギーにより前記基板内に放たれた光電荷の収集を促進するため、前記基板中に電流を発生させることを含み、
量子効率変調が高められることを特徴とする請求項1に記載の方法。 - 前記半導体光検出器が、エピタキシャル領域を含む半導体基板の上に形成され、
ステップ(c)が、前記エピタキシャル領域が(i)前記エピタキシャル領域がそれぞれ異なるドーピング濃度を有する複数の層から成り、前記複数の層の最上層が前記複数の層の下部層よりも低い濃度でドープされているという特徴と、(ii)前記エピタキシャル領域が、ドーピング濃度が前記領域の下部でその上部よりも高くなるようなドーパント勾配のある層を規定するという特徴と、から選択された少なくとも一つの特徴を有する基板が使われることを含む、ことを特徴とする請求項1に記載の方法。 - その量子効率変調をコントロールする前記半導体光検出器の電圧ノードに結合した容量の少なくとも一部分を離調するようにインダクターを結合することを更に含む方法であって、
前記容量の電力損失が削減されることを特徴とする請求項1に記載の該方法。 - それぞれのバンクが一定の位相で量子効率変調されている、少なくとも前記半導体光検出器の第一のバンク及び前記半導体光検出器の第二のバンクを規定することと、
前記第一のバンクからの半導体光検出器一つと前記第二のバンクからの半導体光検出器一つから成る少なくとも一つの画素を規定することと、
を更に含む方法であって、
ステップ(c)が、一つ以上の前記画素に用いられる前記半導体光検出器の一つからの出力を処理することを含むことを特徴とする請求項1に記載の該方法。 - 複数のタイムフレームにわたって距離zを決定することを特徴とする方法であって、
ステップ(c)が、
フレーム毎を基準にして、前記半導体光検出器を少なくとも第一の位相シフトで量子効率変調することと、前記半導体光検出器から前記第一の位相シフトの間に情報を得ることと、
を更に含み、
前記半導体光検出器から前記第一の位相シフトの間に得た情報は、前記タイムフレームのうち少なくとも二つに用いられる、
ことを特徴とする請求項1に記載の該方法。 - 前記半導体光検出器のそれぞれからのアナログ出力をデジタル変換する、
ことを更に含む請求項1に記載の方法。 - ステップ(a)が(i)少なくとも100MHzの前記周波数ωを有する光エネルギーを放射することと、(ii)約850nmの波長を有する光エネルギーを放射することと、のうち少なくとも一つを含むことを特徴とする請求項1に記載の方法。
- ステップ(b)とステップ(c)のうち少なくとも一つを実行する電子回路構成を含む集積回路を提供することを更に含む請求項1に記載の方法。
- 放射された光エネルギーの一部分でターゲットから反射された部分の振幅を測定する方法で、
(a)前記ターゲットに高周波成分S1(ω・t)を含む変調された周期的な波形を有する光エネルギーを照射するステップと、
(b)前記ターゲットから反射された光エネルギーの前記一部分を検出するための一つの集積回路上に隣接して作成された一対の半導体光検出器を提供するステップと、
(c)前記ターゲットから反射された前記光エネルギーの前記一部分を前記隣接して作成された一対の半導体光検出器で差動的に検出するステップと、
(d)前記隣接する一対の半導体光検出器の一方に前記高周波成分S1(ω・t)と同一の変調周波数を有する電圧と該電圧から90°異なる電圧とを交替的に印加し、且つ前記隣接する一対の半導体光検出器の他方に前記高周波成分S 1 (ω・t)と同一の変調周波数を有し且つ前記電圧と逆位相の電圧と前記90°異なる電圧と逆位相の電圧とを交替的に印加して、隣接する一対の半導体光検出器で同一時に互いに逆位相の電圧が印加されるようにして、前記半導体光検出器の空乏領域の幅を変化することによって、前記半導体光検出器の量子効率を変調し、ステップ(c)で検出された信号の前記各電圧に対応する信号成分を求め、これらの信号成分から前記振幅に比例するデータを出力するステップと、
から成り、前記量子効率が、入射フォトン数当りの光電流に寄与した電子−正孔ペアの数である、前記方法。 - 前記周波数ωが少なくとも100MHzであることを特徴とする請求項17に記載の方法。
- 少なくとも一つの半導体光検出器と一つのターゲットの間の距離zを測定するシステムであって、
高周波成分S1(ω・t)を有する変調された周期的な波形を放射する光エネルギー供給源と、
前記ターゲットから反射された前記光エネルギーの一部分を差動的に検出するように一つの集積回路上に隣接して作成配置された一対の半導体光検出器と、
前記隣接して作成配置された一対の半導体光検出器のそれぞれに前記高周波成分S1(ω・t)と同一の変調周波数を有し且つ互いに逆位相の電圧を印加して前記半導体光検出器の空乏領域の幅を変化することによって、前記半導体光検出器の量子効率を変調する手段と、
前記光エネルギー供給源から放射された光エネルギーと前記半導体光検出器のうち少なくとも幾つかで検出された信号との間での位相変化を測定し、この位相変化から、前記距離zに比例するデータを出力する回路と、
から成り、前記量子効率が、入射フォトン数当りの光電流に寄与した電子−正孔ペアの数である、前記システム。 - 前記複数の半導体光検出器及び前記変調手段が一つの集積回路チップ上に製作されることを特徴とする請求項19に記載のシステム。
- 前記複数の半導体光検出器が(i)フォトダイオード検出器、(ii)バイアスゲートの付いたMOS素子及び(iii)フォトゲートの付いたMOS素子のうち少なくとも一つの形態であることを特徴とする請求項19に記載のシステム。
- 前記変調された周期的な波形の供給源と結合しており、閉ループで動作している可変位相遅延回路で、前記可変位相遅延の位相遅延が放射された光エネルギーに対する半導体光検出器で検出された信号の位相遅延を示す該可変位相遅延回路を更に含む請求項19に記載のシステム。
- 前記光エネルギー供給源から放射された光エネルギーと前記半導体光検出器のうち少なくとも幾つかで検出された信号の間の位相変化を測るための前記回路が少なくとも一つの固定位相遅延を用いる、請求項19に記載の該システム。
- 前記変調手段が前記半導体光検出器の逆バイアスを変化させることを特徴とする請求項19に記載のシステム。
- 前記半導体光検出器がフォトゲート検出器を含み、前記変調手段が前記フォトゲート検出器のゲートポテンシャルを変化させることを特徴とする請求項19に記載のシステム。
- 前記光エネルギー供給源から放射された光エネルギーと前記半導体光検出器で検出された信号の間の位相変化を測るための回路構成と、
前記半導体光検出器のバンクと、
を更に含むシステムであって、
前記変調手段が前記半導体光検出器の前記バンクを異なる位相で変調させることを特徴とする請求項19に記載の該システム。 - 前記半導体光検出器が半導体基板の上に形成され、
反射された前記光エネルギーにより前記基板内に放たれた光電荷の収集を促進するため、前記基板中に電流を発生させる手段を更に含むことを特徴とするシステムであって、
量子効率変調が高められることを特徴とする請求項19に記載の該システム。 - 前記半導体光検出器が、エピタキシャル領域を含む半導体基板の上に形成され、前記基板の前記エピタキシャル領域が(i)前記エピタキシャル領域がそれぞれ異なるドーピング濃度を有する複数の層から成り、前記複数の層の最上層が前記複数の層の下部層よりも低い濃度でドープされているという特徴と、(ii)前記エピタキシャル領域が、ドーピング濃度が前記領域の下部でその上部よりも高くなるようなドーパント勾配のある層を規定するという特徴と、から選択された少なくとも一つの特徴を有することを特徴とする請求項19に記載のシステム。
- その量子効率変調をコントロールする前記半導体光検出器の電圧ノードに結合した容量の少なくとも一部分を離調するように結合されているインダクターを更に含むシステムであって、
前記容量の電力損失が削減されることを特徴とする請求項19に記載の該システム。 - 前記半導体光検出器の第一のバンクと、
前記半導体光検出器の第二のバンクと、
前記変調手段が、一定の位相で前記第一のバンク及び前記第二のバンクを量子効率変調していて、
前記第一のバンクからの半導体光検出器一つと前記第二のバンクからの半導体光検出器一つから成る少なくとも一つの画素と、
を更に含むシステムであって、
前記回路が、二つ以上の前記画素に用いられる前記半導体光検出器の一つからの出力を処理することを特徴とする請求項19に記載の該システム。 - 前記システムが複数のタイムフレームにわたって距離zを決定し、
フレーム毎を基準にして、前記量子効率変調手段が前記半導体光検出器を少なくとも第一の位相シフトで変調し、前記半導体光検出器から前記第一の位相シフトの間に情報を得て、
前記半導体光検出器から前記第一の位相シフトの間に得た情報は、少なくとも二つの前記タイムフレームに用いられる、
ことを特徴とする請求項19に記載のシステム。 - 前記半導体光検出器のそれぞれからのアナログ出力をデジタル変換する手段を更に含む請求項19に記載のシステム。
- 前記周波数ωが少なくとも100MHzであることを特徴とする請求項19に記載のシステム。
- システムにコントロールされた光エネルギーの供給源と一つのターゲットとの間の距離zを測るCMOSで実施可能な集積回路であって、前記集積回路が
高周波成分S1(ω・t)を有する変調された周期的な波形を放射する光エネルギーの供給源と結合可能なジェネレーターと、
前記ターゲットから反射された前記光エネルギーの一部分を差動的に検出するように一つの集積回路上に隣接して作成配置された一対の半導体光検出器と、
前記隣接して作成配置された一対の半導体光検出器のそれぞれに前記高周波成分S1(ω・t)と同一の変調周波数を有し且つ互いに逆位相の電圧を印加して前記半導体光検出器の空乏領域の幅を変化することによって、前記半導体光検出器の量子効率を変調する手段と、
前記光エネルギーの供給源から放射された光エネルギーと前記半導体光検出器のうち少なくとも幾つかで検出された信号との間での位相変化を測定し、この位相変化から、前記距離zに比例するデータを出力する回路と、
から成り、前記量子効率が、入射フォトン数当りの光電流に寄与した電子−正孔ペアの数である、前記CMOSで実施可能な集積回路。 - 前記複数の半導体検出器が(i)フォトダイオード検出器、(ii)バイアスゲートの付いたMOS素子及び(iii)フォトゲートの付いたMOS素子、のうち少なくとも一つの形態であることを特徴とする請求項34に記載の集積回路。
- 前記変調された周期的な波形の供給源と結合しており、閉ループで動作している可変位相遅延回路で、前記可変位相遅延の位相遅延が放射された光エネルギーに対する半導体光検出器で検出された信号の位相遅延を示す該可変位相遅延回路を更に含む請求項34に記載の集積回路。
- 前記光エネルギー供給源から放射された光エネルギーと前記半導体光検出器のうち少なくとも幾つかで検出された信号の間の位相変化を測るための前記回路が少なくとも一つの固定位相遅延を用いる請求項34に記載の該集積回路。
- 前記変調手段が前記半導体光検出器の逆バイアスを変化させることを特徴とする請求項34に記載の集積回路。
- 前記半導体光検出器がフォトゲート検出器を含み、前記変調手段が前記フォトゲート検出器のゲートポテンシャルを変化させることを特徴とする請求項34に記載の集積回路。
- 前記半導体光検出器のバンクと
を更に含む集積回路であって、
前記変調手段が前記半導体光検出器の前記バンクを異なる位相で変調させることを特徴とする請求項34に記載の該集積回路。 - 反射された前記光エネルギーにより前記基板内に放たれた光電荷の収集を促進するため、前記基板中に電流を発生させる手段
を更に含む集積回路であって、
量子効率変調が高められることを特徴とする請求項34に記載の該集積回路。 - 反射された前記光エネルギーにより前記基板内に放たれた光電荷の収集を促進するため、前記基板中に電流を発生させるバイアス回路を更に含む集積回路であって、
量子効率変調が高められることを特徴とする請求項34に記載の該集積回路。 - 前記半導体光検出器が、エピタキシャル領域を含む半導体基板の上に形成され、前記基板の前記エピタキシャル領域が、(i)前記エピタキシャル領域がそれぞれ異なるドーピング濃度を有する複数の層から成り、前記複数の層の最上層が前記複数の層の下部層よりも低い濃度でドープされているという特徴と、(ii)前記エピタキシャル領域が、ドーピング濃度が前記領域の下部でその上部よりも高くなるようなドーパント勾配のある層を規定するという特徴と、から選択された少なくとも一つの特徴を有することを特徴とする請求項34に記載の集積回路。
- その量子効率変調をコントロールする前記半導体光検出器の電圧ノードに結合した容量の少なくとも一部分を離調するように結合されているインダクターを更に含む集積回路であって、
前記容量の電力損失が削減されることを特徴とする請求項34に記載の該集積回路。 - 前記半導体光検出器の第一のバンクと、
前記半導体光検出器の第二のバンクと、
前記変調手段が、一定の位相で前記第一のバンク及び前記第二のバンクを量子効率変調していて、
前記第一のバンクからの半導体光検出器一つと前記第二のバンクからの半導体光検出器一つから成る少なくとも一つの画素と、
を更に含む集積回路であって、
前記回路が、二つ以上の前記画素に用いられる前記半導体光検出器の一つからの出力を処理することを特徴とする請求項34に記載の該集積回路。 - 前記システムが複数のタイムフレームにわたって距離zを測定し、
フレーム毎を基準にして、前記量子効率変調手段が前記半導体光検出器を少なくとも第一の位相シフトで変調し、前記半導体光検出器から前記第一の位相シフトの間に情報を得て、
前記半導体光検出器から前記第一の位相シフトの間に得た情報は、少なくとも二つの前記タイムフレームに用いられる、
ことを特徴とする請求項34に記載の集積回路。 - 少なくとも前記変調手段の動作をコントロールするマイクロプロセッサーを更に含む請求項34に記載の集積回路。
- 前記半導体光検出器のそれぞれからのアナログ出力をデジタル変換する手段を更に含む請求項34に記載の集積回路。
- 前記周波数ωが少なくとも100MHzであることを特徴とする請求項34に記載の集積回路。
- 放射された前記光エネルギーが約850nmの波長を有することを特徴とする請求項34に記載の集積回路。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US25487300P | 2000-12-11 | 2000-12-11 | |
| US09/876,373 US6587186B2 (en) | 2000-06-06 | 2001-06-06 | CMOS-compatible three-dimensional image sensing using reduced peak energy |
| PCT/US2001/048219 WO2002049339A2 (en) | 2000-12-11 | 2001-12-11 | Cmos-compatible three-dimensional image sensing using quantum efficiency modulation |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2004525351A JP2004525351A (ja) | 2004-08-19 |
| JP4533582B2 true JP4533582B2 (ja) | 2010-09-01 |
Family
ID=26944292
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2002550710A Expired - Lifetime JP4533582B2 (ja) | 2000-12-11 | 2001-12-11 | 量子効率変調を用いたcmosコンパチブルの三次元イメージセンシングのためのシステム |
Country Status (4)
| Country | Link |
|---|---|
| EP (1) | EP1356664A4 (ja) |
| JP (1) | JP4533582B2 (ja) |
| AU (1) | AU2002239608A1 (ja) |
| WO (1) | WO2002049339A2 (ja) |
Families Citing this family (22)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR100682566B1 (ko) * | 2002-07-15 | 2007-02-15 | 마츠시다 덴코 가부시키가이샤 | 제어 가능한 감도를 가진 수광 장치 및 그러한 수광장치를 이용하는 공간 정보 검출 장치 |
| WO2004093318A2 (en) * | 2003-04-11 | 2004-10-28 | Canesta, Inc. | Method and system to differentially enhance sensor dynamic range |
| JP4280822B2 (ja) * | 2004-02-18 | 2009-06-17 | 国立大学法人静岡大学 | 光飛行時間型距離センサ |
| US7126100B1 (en) * | 2004-05-21 | 2006-10-24 | Kla-Tencor Technologies Corporation | System and method for sensing using adjustable modulation transfer function (MTF) |
| DE102004037137B4 (de) * | 2004-07-30 | 2017-02-09 | PMD Technologie GmbH | Verfahren und Vorrichtung zur Entfernungsmessung |
| TWI280042B (en) | 2004-09-17 | 2007-04-21 | Matsushita Electric Works Ltd | A range image sensor |
| JP2006337286A (ja) * | 2005-06-03 | 2006-12-14 | Ricoh Co Ltd | 形状計測装置 |
| JP4944579B2 (ja) * | 2005-11-14 | 2012-06-06 | パナソニック株式会社 | 空間情報の検出装置 |
| NL1032435C2 (nl) * | 2006-09-05 | 2008-03-06 | Maasland Nv | Inrichting voor het automatisch melken van een melkdier. |
| JP4757779B2 (ja) * | 2006-11-15 | 2011-08-24 | 浜松ホトニクス株式会社 | 距離画像センサ |
| JP5295511B2 (ja) * | 2007-03-23 | 2013-09-18 | 富士フイルム株式会社 | 測距装置及び測距方法 |
| JP4831760B2 (ja) * | 2007-03-29 | 2011-12-07 | 日本放送協会 | 3次元情報検出方法及びその装置 |
| US8629976B2 (en) * | 2007-10-02 | 2014-01-14 | Microsoft Corporation | Methods and systems for hierarchical de-aliasing time-of-flight (TOF) systems |
| EP2208239A1 (en) | 2007-10-11 | 2010-07-21 | Jie Yao | Photo-detector array and semiconductor image intensifier |
| WO2010083263A1 (en) | 2009-01-15 | 2010-07-22 | Jie Yao | Mesa heterojunction phototransistor and method for making same |
| DE102013209161B4 (de) | 2013-05-16 | 2025-03-13 | pmdtechnologies ag | Lichtlaufzeitsensor |
| JP6386777B2 (ja) * | 2014-05-08 | 2018-09-05 | 浜松ホトニクス株式会社 | 距離画像センサ |
| DE102014211071A1 (de) * | 2014-06-11 | 2015-12-17 | Robert Bosch Gmbh | Fahrzeug-Lidar-System |
| US10134926B2 (en) | 2015-02-03 | 2018-11-20 | Microsoft Technology Licensing, Llc | Quantum-efficiency-enhanced time-of-flight detector |
| CN110431441B (zh) * | 2017-03-19 | 2023-09-15 | 科维塔公司 | 用于调制的图像捕获的系统和方法 |
| JP7404930B2 (ja) * | 2020-02-26 | 2023-12-26 | 富士フイルムビジネスイノベーション株式会社 | 発光装置、光学装置及び計測装置 |
| US11808859B2 (en) * | 2020-12-10 | 2023-11-07 | GM Global Technology Operations LLC | System and method of depth imaging based on rolling shutter cmos image sensor and down conversion techniques |
Family Cites Families (29)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4764982A (en) * | 1962-07-02 | 1988-08-16 | Pfund Charles E | Secure communication system |
| US4277167A (en) * | 1976-08-25 | 1981-07-07 | The United States Of America As Represented By The Secretary Of The Navy | Depth mapping system |
| DE3379441D1 (en) * | 1982-09-23 | 1989-04-20 | Secr Defence Brit | Infrared detectors |
| JPH0224590A (ja) * | 1988-07-13 | 1990-01-26 | Fujitsu Ltd | 振幅変調形測距装置 |
| JP2847289B2 (ja) * | 1988-10-19 | 1999-01-13 | キヤノン株式会社 | 距離形状測定装置 |
| US5446529A (en) * | 1992-03-23 | 1995-08-29 | Advanced Scientific Concepts, Inc. | 3D imaging underwater laser radar |
| GB2265514B (en) * | 1992-03-28 | 1995-08-16 | Marconi Gec Ltd | A receiver-transmitter for a target identification system |
| JP3307730B2 (ja) * | 1993-08-30 | 2002-07-24 | 浜松ホトニクス株式会社 | 光学測定装置 |
| JPH07110381A (ja) * | 1993-10-07 | 1995-04-25 | Wacom Co Ltd | 距離カメラ装置 |
| JP3305083B2 (ja) * | 1993-12-22 | 2002-07-22 | キヤノン株式会社 | 光レーダ |
| DE4440613C1 (de) * | 1994-11-14 | 1996-07-25 | Leica Ag | Vorrichtung und Verfahren zur Detektion und Demodulation eines intensitätsmodulierten Strahlungsfeldes |
| US5682229A (en) * | 1995-04-14 | 1997-10-28 | Schwartz Electro-Optics, Inc. | Laser range camera |
| JPH08313215A (ja) * | 1995-05-23 | 1996-11-29 | Olympus Optical Co Ltd | 2次元距離センサ |
| US6057909A (en) * | 1995-06-22 | 2000-05-02 | 3Dv Systems Ltd. | Optical ranging camera |
| IL116438A (en) * | 1995-12-18 | 2000-01-31 | Israel State | Laser sensor |
| US5831719A (en) * | 1996-04-12 | 1998-11-03 | Holometrics, Inc. | Laser scanning system |
| US5892575A (en) * | 1996-05-10 | 1999-04-06 | Massachusetts Institute Of Technology | Method and apparatus for imaging a scene using a light detector operating in non-linear geiger-mode |
| DE19704496C2 (de) * | 1996-09-05 | 2001-02-15 | Rudolf Schwarte | Verfahren und Vorrichtung zur Bestimmung der Phasen- und/oder Amplitudeninformation einer elektromagnetischen Welle |
| AU715284B2 (en) * | 1996-09-05 | 2000-01-20 | Rudolf Schwarte | Method and apparatus for determining the phase and/or amplitude information of an electromagnetic wave |
| DE19643287A1 (de) * | 1996-10-21 | 1998-04-23 | Leica Ag | Verfahren und Vorrichtung zur Kalibrierung von Entfernungsmeßgeräten |
| US5859462A (en) | 1997-04-11 | 1999-01-12 | Eastman Kodak Company | Photogenerated carrier collection of a solid state image sensor array |
| US5953110A (en) * | 1998-04-23 | 1999-09-14 | H.N. Burns Engineering Corporation | Multichannel laser radar |
| DE19821974B4 (de) | 1998-05-18 | 2008-04-10 | Schwarte, Rudolf, Prof. Dr.-Ing. | Vorrichtung und Verfahren zur Erfassung von Phase und Amplitude elektromagnetischer Wellen |
| FR2780163B1 (fr) * | 1998-06-18 | 2000-08-11 | Agence Spatiale Europeenne | Systeme de telescopie laser doppler incoherente |
| JP2000121332A (ja) * | 1998-10-14 | 2000-04-28 | Fuji Xerox Co Ltd | 三次元形状測定装置 |
| US6137566A (en) * | 1999-02-24 | 2000-10-24 | Eoo, Inc. | Method and apparatus for signal processing in a laser radar receiver |
| US6323942B1 (en) * | 1999-04-30 | 2001-11-27 | Canesta, Inc. | CMOS-compatible three-dimensional image sensor IC |
| JP2001289951A (ja) * | 2000-04-11 | 2001-10-19 | Yokogawa Electric Corp | 距離測定装置 |
| ATE447723T1 (de) * | 2000-09-27 | 2009-11-15 | Leica Geosystems Ag | Vorrichtung und verfahren zur signalerfassung bei einem entfernungsmessgerät |
-
2001
- 2001-12-11 EP EP01987386A patent/EP1356664A4/en not_active Ceased
- 2001-12-11 AU AU2002239608A patent/AU2002239608A1/en not_active Abandoned
- 2001-12-11 WO PCT/US2001/048219 patent/WO2002049339A2/en not_active Ceased
- 2001-12-11 JP JP2002550710A patent/JP4533582B2/ja not_active Expired - Lifetime
Also Published As
| Publication number | Publication date |
|---|---|
| WO2002049339A2 (en) | 2002-06-20 |
| WO2002049339A3 (en) | 2003-02-27 |
| EP1356664A4 (en) | 2009-07-22 |
| JP2004525351A (ja) | 2004-08-19 |
| AU2002239608A1 (en) | 2002-06-24 |
| EP1356664A2 (en) | 2003-10-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US6515740B2 (en) | Methods for CMOS-compatible three-dimensional image sensing using quantum efficiency modulation | |
| JP4533582B2 (ja) | 量子効率変調を用いたcmosコンパチブルの三次元イメージセンシングのためのシステム | |
| US6580496B2 (en) | Systems for CMOS-compatible three-dimensional image sensing using quantum efficiency modulation | |
| JP5638490B2 (ja) | 三次元及び色彩検出における電荷管理のための方法及び装置 | |
| US6587186B2 (en) | CMOS-compatible three-dimensional image sensing using reduced peak energy | |
| US7994465B1 (en) | Methods and devices for improved charge management for three-dimensional and color sensing | |
| Lange et al. | Solid-state time-of-flight range camera | |
| US7352454B2 (en) | Methods and devices for improved charge management for three-dimensional and color sensing | |
| US6825455B1 (en) | Method and apparatus for photomixing | |
| EP3732501A2 (en) | Methods and systems for high-resolution long-range flash lidar | |
| CN109791205A (zh) | 用于从成像阵列中的像素单元的曝光值减除背景光的方法以及用于该方法的像素单元 | |
| CN109791207A (zh) | 用于确定到对象的距离的系统和方法 | |
| CN109791204A (zh) | 用于确定到对象的距离的系统 | |
| Qian et al. | Single photon detectors for automotive LiDAR applications: State-of-the-art and research challenges | |
| US11531094B2 (en) | Method and system to determine distance using time of flight measurement comprising a control circuitry identifying which row of photosensitive image region has the captured image illumination stripe | |
| JP7434128B2 (ja) | 距離計測装置 | |
| Nemecek et al. | Distance measurement sensor with PIN-photodiode and bridge circuit | |
| US20220137222A1 (en) | Time-of-flight image sensor | |
| KR20220141006A (ko) | 촬영 장치 | |
| EP1846948A2 (en) | Methods and devices for improved charge management for three-dimensional and color sensing | |
| JP4001598B2 (ja) | 時間相関検出型イメージセンサおよび画像解析方法 | |
| Moutaye et al. | Design of a CMOS APD array for a 3-D camera based on the time of flight distance measurement | |
| Hossain | Design and Characterization of a Current Assisted Photo Mixing Demodulator for Tof Based 3d Cmos Image Sensor |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20041202 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20070618 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20070918 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20070926 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20071018 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20080107 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20080407 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20080414 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20080703 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20090511 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20090911 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20091019 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20091102 |
|
| A911 | Transfer to examiner for re-examination before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20091109 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20100210 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100218 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20100513 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20100614 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 Ref document number: 4533582 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130618 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130618 Year of fee payment: 3 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313113 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313113 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| EXPY | Cancellation because of completion of term |