JP4593341B2 - ナビゲーションシステム、その制御方法及び制御プログラム - Google Patents
ナビゲーションシステム、その制御方法及び制御プログラム Download PDFInfo
- Publication number
- JP4593341B2 JP4593341B2 JP2005098697A JP2005098697A JP4593341B2 JP 4593341 B2 JP4593341 B2 JP 4593341B2 JP 2005098697 A JP2005098697 A JP 2005098697A JP 2005098697 A JP2005098697 A JP 2005098697A JP 4593341 B2 JP4593341 B2 JP 4593341B2
- Authority
- JP
- Japan
- Prior art keywords
- vehicle speed
- value
- acceleration
- cumulative value
- unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images





Landscapes
- Navigation (AREA)
- Traffic Control Systems (AREA)
- Position Fixing By Use Of Radio Waves (AREA)
Description
本実施形態は、車両に搭載するナビゲーションシステム(以下「本システム」と呼ぶ)に関するが、その制御方法や制御プログラムとしても把握可能である。まず、図1に本システムの構成要素の例を示す。
これらの具体的作用原理は、次の通りである。まず、GPS情報(衛星電波)を受信できる状態においては、受信したGPS情報に基づいて算出した車速(単位時間における現在位置の変化量)を自車位置の把握や走行状態の検出に利用し、GPS情報を受信できない場合には、加速度センサ出力の累積値と対照データD(図5)を利用して車速を推測する。
そして、本システムでは、車両の走行速度(車速)を算出するために、加速度センサ出力とGPSの位置データを用いるが、そのための動作は、図2のフローチャートに示すように、受信電波が十分でGPSを使って自車位置認識ができるか否かにより(ステップ30)、以下2つのモードに分けることができる。
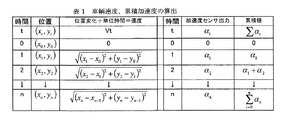
作成モードでは、図3のフローチャートに例示するように、単位時間ごとに、絶対位置検出部7でGPSにより検出される絶対位置と、加速度検出部8で検出する加速度出力である加速度値と、をCPU1が監視し(ステップ11)、変化がない状態は「車両停止状態」とみなす(ステップ12)。すなわち、絶対位置、加速度値に変化が検出された時点を「車両走行開始」とみなし(ステップ12)、ここを基点として以後、単位時間ごとに絶対位置と加速度値を(ステップ11)記憶部2に取り込む(ステップ13)。
活用モードは、上記のように累積値Σαから速度Vを決定するものである。このため、予め、作成モードにより図5に示す表2のようなデータベースが記憶メディア部5に作成されている。このデータベースは、GPSからの位置情報が受信できない状態の時に、加速度値の累積値とデータベースを比較することで車速を決定するのに用いる。
以上のように、本実施形態では、加速度センサから得る加速度値の累積値と、GPSによる位置データの変化量から求める車速との対照データの利用により、トンネル内、ビルや大木の陰などGPS衛星電波の不十分な場合でも、車両ECUとの配線接続や車速信号無しで車速を高精度に推測することが可能となる。また、これにより、ナビゲーションシステムを車両に取り付ける際の配線作業における工数や費用が削減でき、ポータブルタイプのナビゲーションシステムにおいても車速や自車位置の認識精度が向上する。
なお、本発明は上記実施形態に限定されるものではなく、以下に例示するもの及びそれ以外の、他の実施形態も含むものである。例えば、上記実施形態では、加速度センサ出力である加速度値の累積値とGPSによる車速を「所定時間毎」に検出してデータベース化する例を示したが、対応関係の得られた累積値や車速の値が不規則に飛び飛びになると、線形補正等を行っても値の範囲によって精度が異なるなど、その後の処理に利用しにくい場合も考えられる。
累積値 速度V
Σα(v)(km/h)
1 V1
2 V2
3 V3
4 V4
5 V5
: :
のような例が考えられるが、速度の側を所定間隔で固定(例えば、5km/h、10km/h、15km/h、20km/h …)しても良い。
2…主記憶部
3…表示制御部
4…CPU周辺回路部
5…記憶メディア部
D…対照データ
6…相対方位検出部
7…絶対位置検出部
8…加速度検出部
9…車両インタフェース部
10…映像信号処理部
11…画面表示部
Claims (9)
- GPSを含む航法センサ部と、情報の記憶部及び入出力部と、前記各部を用いて情報処理を行う制御部と、を備え、車両に搭載するナビゲーションシステムにおいて、
前記制御部により、
車両の加速度又は加速度に対応する値を加速度値として取得すると共に、その加速度値を累積した累積値を算出する累積手段と、
GPSで得る位置の変化量に基き車速を算出する車速算出手段と、
同じ時点における前記累積値と前記車速との各組を対応付けて対照データとして前記記憶部に記録する記録手段と、
前記GPSにおける衛星電波の受信状態が不十分な場合に、現時点における前記累積値をもとに、前記対照データを参照し同じ累積値又は近い累積値に対応付けられた車速により、現時点の車速を推定する推定処理手段と、
を実現することを特徴とするナビゲーションシステム。 - 前記記録手段は、前記車速又は前記累積値の所定の刻みごとに、その組を前記対照データに組み込んで記録する
ことを特徴とする請求項1記載のナビゲーションシステム。 - 前記記録手段は、
前記対照データに既に車速と共に記録済の累積値と同じ累積値に対応する新たな車速を再度検出した場合、既に記録済の車速と新たな車速との平均値を、その累積値と対応付けて記録する
ことを特徴とする請求項1又は2記載のナビゲーションシステム。 - GPSを含む航法センサ部と、情報の記憶部及び入出力部と、前記各部を用いて情報処理を行う制御部と、を備え、車両に搭載するナビゲーションシステムの制御方法において、
前記制御部により、
車両の加速度又は加速度に対応する値を加速度値として取得すると共に、その加速度値を累積した累積値を算出する累積処理と、
GPSで得る位置の変化量に基き車速を算出する車速算出処理と、
同じ時点における前記累積値と前記車速との各組を対応付けて対照データとして前記記憶部に記録する記録処理と、
前記GPSにおける衛星電波の受信状態が不十分な場合に、現時点における前記累積値をもとに、前記対照データを参照し同じ累積値又は近い累積値に対応付けられた車速により、現時点の車速を推定する推定処理と、
を実行することを特徴とするナビゲーションシステムの制御方法。 - 前記記録処理は、前記車速又は前記累積値の所定の刻みごとに、その組を前記対照データに組み込んで記録する
ことを特徴とする請求項4記載のナビゲーションシステムの制御方法。 - 前記記録処理は、
前記対照データに既に車速と共に記録済の累積値と同じ累積値に対応する新たな車速を再度検出した場合、既に記録済の車速と新たな車速との平均値を、その累積値と対応付けて記録する
ことを特徴とする請求項4又は5記載のナビゲーションシステムの制御方法。 - GPSを含む航法センサ部と、情報の記憶部及び入出力部と、前記各部を用いて情報処理を行う制御部と、を備え、車両に搭載するナビゲーションシステムの制御プログラムにおいて、
前記制御部により、
車両の加速度又は加速度に対応する値を加速度値として取得すると共に、その加速度値を累積した累積値を算出する累積処理と、
GPSで得る位置の変化量に基き車速を算出する車速算出処理と、
同じ時点における前記累積値と前記車速との各組を対応付けて対照データとして前記記憶部に記録する記録処理と、
前記GPSにおける衛星電波の受信状態が不十分な場合に、現時点における前記累積値をもとに、前記対照データを参照し同じ累積値又は近い累積値に対応付けられた車速により、現時点の車速を推定する推定処理と、
を実行させることを特徴とするナビゲーションシステムの制御プログラム。 - 前記記録処理は、前記車速又は前記累積値の所定の刻みごとに、その組を前記対照データに組み込んで記録する
ことを特徴とする請求項7記載のナビゲーションシステムの制御プログラム。 - 前記記録処理は、
前記対照データに既に車速と共に記録済の累積値と同じ累積値に対応する新たな車速を再度検出した場合、既に記録済の車速と新たな車速との平均値を、その累積値と対応付けて記録する
ことを特徴とする請求項7又は8記載のナビゲーションシステムの制御プログラム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005098697A JP4593341B2 (ja) | 2005-03-30 | 2005-03-30 | ナビゲーションシステム、その制御方法及び制御プログラム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005098697A JP4593341B2 (ja) | 2005-03-30 | 2005-03-30 | ナビゲーションシステム、その制御方法及び制御プログラム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2006275936A JP2006275936A (ja) | 2006-10-12 |
| JP4593341B2 true JP4593341B2 (ja) | 2010-12-08 |
Family
ID=37210846
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2005098697A Expired - Fee Related JP4593341B2 (ja) | 2005-03-30 | 2005-03-30 | ナビゲーションシステム、その制御方法及び制御プログラム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4593341B2 (ja) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5552744B2 (ja) * | 2009-02-10 | 2014-07-16 | 日本精工株式会社 | 電動パワーステアリング装置 |
| KR102150730B1 (ko) * | 2014-05-16 | 2020-09-01 | 주식회사 엘지유플러스 | 내비게이션의 메뉴 항목을 표시하는 방법 및 그 내비게이션 |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2856310B2 (ja) * | 1994-04-01 | 1999-02-10 | ソニー株式会社 | 速度検出装置及びナビゲーシヨン装置 |
| JPH07286853A (ja) * | 1994-04-15 | 1995-10-31 | Nissan Motor Co Ltd | 車両用位置検出装置 |
| JP2856312B2 (ja) * | 1994-07-07 | 1999-02-10 | ソニー株式会社 | 速度検出装置 |
| JP3380404B2 (ja) * | 1995-08-28 | 2003-02-24 | 日本政策投資銀行 | 移動検出装置 |
| JPH109877A (ja) * | 1996-06-21 | 1998-01-16 | Omron Corp | 車速検出システム及びそれを用いたナビゲーション装置 |
| JPH10307032A (ja) * | 1997-05-02 | 1998-11-17 | Pioneer Electron Corp | ナビゲーション装置 |
| JP4085463B2 (ja) * | 1998-04-10 | 2008-05-14 | ソニー株式会社 | 速度計測方法および速度計測装置 |
| JP3727489B2 (ja) * | 1999-06-01 | 2005-12-14 | 三菱電機株式会社 | ロケータ装置 |
| JP4595215B2 (ja) * | 2001-03-01 | 2010-12-08 | ソニー株式会社 | 位置情報検出装置、加速度センサーの出力の補正方法及び加速度センサーの出力を補正するプログラム |
| JP4110742B2 (ja) * | 2001-03-19 | 2008-07-02 | 松下電器産業株式会社 | ナビゲーション装置 |
-
2005
- 2005-03-30 JP JP2005098697A patent/JP4593341B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2006275936A (ja) | 2006-10-12 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5057952B2 (ja) | 角速度補正装置及びその補正方法並びにナビゲーション装置 | |
| EP2362184A1 (en) | Mobile navigation device | |
| JP7205157B2 (ja) | 情報処理システム、プログラム、及び情報処理方法 | |
| CN101464156B (zh) | 记录行进轨迹的装置、便携式电子设备和方法 | |
| JPH10132843A (ja) | 速度演算装置 | |
| JP4522487B2 (ja) | 位置情報検出装置、位置情報検出方法、位置情報検出プログラム及び記憶媒体 | |
| CN118597130B (zh) | 巡航车速控制方法、装置、设备及计算机可读存储介质 | |
| US20080243384A1 (en) | Azimuth determination apparatus, azimuth determination method and azimuth determination program | |
| CN110579619B (zh) | 车辆测速、定位方法和装置以及电子设备 | |
| US20140005930A1 (en) | Locating mobile devices | |
| CN112013855A (zh) | 定位导航方法及系统 | |
| JP4593341B2 (ja) | ナビゲーションシステム、その制御方法及び制御プログラム | |
| JP4677794B2 (ja) | コーナ情報提供装置 | |
| EP1980822A1 (en) | Navigation device, navigation method, program therefor, and recording medium therefor | |
| US10977934B2 (en) | Information providing system, vehicle-mounted device, and information providing method | |
| JP5891120B2 (ja) | 速度算出装置、速度算出方法、速度算出プログラム、および記録媒体 | |
| JP2006226824A (ja) | 車両用情報報知装置 | |
| JPWO2008075438A1 (ja) | ナビゲーション装置、マップマッチング方法、及び、マップマッチングプログラム | |
| JP2002206934A (ja) | ナビゲーション装置 | |
| JP4595215B2 (ja) | 位置情報検出装置、加速度センサーの出力の補正方法及び加速度センサーの出力を補正するプログラム | |
| JP2006317287A (ja) | 車両用現在位置決定装置 | |
| JP4987872B2 (ja) | 情報記録装置、情報記録方法、情報記録プログラムおよびコンピュータに読み取り可能な記録媒体 | |
| JP2009098127A (ja) | ナビゲーション装置 | |
| JP5916540B2 (ja) | 速度算出装置、速度算出方法、速度算出プログラム、および記録媒体 | |
| JP2017054000A (ja) | 検出装置、検出方法とそのプログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20080324 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20100826 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20100907 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20100915 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130924 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |