JP4614536B2 - モデル予測制御用ロバスト定常状態目標計算を用いたシステム制御方法、システム制御装置及びコントローラ並びにモデル予測制御用ロバスト定常状態目標計算を用いたシステム制御方法を実行するプログラム記憶媒体 - Google Patents
モデル予測制御用ロバスト定常状態目標計算を用いたシステム制御方法、システム制御装置及びコントローラ並びにモデル予測制御用ロバスト定常状態目標計算を用いたシステム制御方法を実行するプログラム記憶媒体 Download PDFInfo
- Publication number
- JP4614536B2 JP4614536B2 JP2000571938A JP2000571938A JP4614536B2 JP 4614536 B2 JP4614536 B2 JP 4614536B2 JP 2000571938 A JP2000571938 A JP 2000571938A JP 2000571938 A JP2000571938 A JP 2000571938A JP 4614536 B2 JP4614536 B2 JP 4614536B2
- Authority
- JP
- Japan
- Prior art keywords
- variable
- system control
- objective function
- control output
- variables
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Lifetime
Links
- 238000000034 method Methods 0.000 title claims description 54
- 238000004364 calculation method Methods 0.000 title claims description 41
- 230000008569 process Effects 0.000 claims description 29
- 239000011159 matrix material Substances 0.000 claims description 28
- 239000013598 vector Substances 0.000 claims description 26
- 238000005315 distribution function Methods 0.000 claims description 5
- 239000006185 dispersion Substances 0.000 claims 1
- 238000005457 optimization Methods 0.000 description 33
- 238000004422 calculation algorithm Methods 0.000 description 10
- 238000005516 engineering process Methods 0.000 description 10
- 230000008859 change Effects 0.000 description 8
- 238000013461 design Methods 0.000 description 7
- 238000010586 diagram Methods 0.000 description 7
- 230000004044 response Effects 0.000 description 7
- 239000004576 sand Substances 0.000 description 7
- 238000013459 approach Methods 0.000 description 5
- 230000000875 corresponding effect Effects 0.000 description 5
- 230000008901 benefit Effects 0.000 description 4
- 238000001311 chemical methods and process Methods 0.000 description 4
- 238000012552 review Methods 0.000 description 4
- 230000001276 controlling effect Effects 0.000 description 3
- 230000001351 cycling effect Effects 0.000 description 3
- 238000009826 distribution Methods 0.000 description 3
- 241000048246 Gallicrex cinerea Species 0.000 description 2
- 230000009471 action Effects 0.000 description 2
- 238000012432 intermediate storage Methods 0.000 description 2
- 238000004519 manufacturing process Methods 0.000 description 2
- OVSKIKFHRZPJSS-UHFFFAOYSA-N 2,4-D Chemical compound OC(=O)COC1=CC=C(Cl)C=C1Cl OVSKIKFHRZPJSS-UHFFFAOYSA-N 0.000 description 1
- 230000005540 biological transmission Effects 0.000 description 1
- 238000006243 chemical reaction Methods 0.000 description 1
- 238000004590 computer program Methods 0.000 description 1
- 238000011217 control strategy Methods 0.000 description 1
- 238000001816 cooling Methods 0.000 description 1
- 238000007334 copolymerization reaction Methods 0.000 description 1
- 230000002596 correlated effect Effects 0.000 description 1
- 238000011161 development Methods 0.000 description 1
- 230000009977 dual effect Effects 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 238000010438 heat treatment Methods 0.000 description 1
- 238000011835 investigation Methods 0.000 description 1
- 238000012886 linear function Methods 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 230000000116 mitigating effect Effects 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000010587 phase diagram Methods 0.000 description 1
- 238000004886 process control Methods 0.000 description 1
- 238000004540 process dynamic Methods 0.000 description 1
- 230000001105 regulatory effect Effects 0.000 description 1
- 238000011160 research Methods 0.000 description 1
- 230000035945 sensitivity Effects 0.000 description 1
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 1
Images












Classifications
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B13/00—Adaptive control systems, i.e. systems automatically adjusting themselves to have a performance which is optimum according to some preassigned criterion
- G05B13/02—Adaptive control systems, i.e. systems automatically adjusting themselves to have a performance which is optimum according to some preassigned criterion electric
- G05B13/04—Adaptive control systems, i.e. systems automatically adjusting themselves to have a performance which is optimum according to some preassigned criterion electric involving the use of models or simulators
- G05B13/048—Adaptive control systems, i.e. systems automatically adjusting themselves to have a performance which is optimum according to some preassigned criterion electric involving the use of models or simulators using a predictor
Landscapes
- Engineering & Computer Science (AREA)
- Health & Medical Sciences (AREA)
- Artificial Intelligence (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Evolutionary Computation (AREA)
- Medical Informatics (AREA)
- Software Systems (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Automation & Control Theory (AREA)
- Feedback Control In General (AREA)
Description
〔関連出願の他所参照〕
本出願は、1999年3月11日出願の米国特許出願第09/266,709号の部分継続出願であり、同出願の優先権を主張し、1998年9月28日出願の米国特許出願第60/102,325号の利益を主張するものである。前記出願は、その全文が本明細書の一部をなすものとしてここに引用するものとする。
【0002】
【発明の属する技術分野】
本発明は、一般にコンピュータをベースとする制御システムおよびその制御アルゴリズムの分野、特にコンピュータ制御アルゴリズムのモデル予測制御クラスに関する。
【0003】
【従来の技術】
“MPC”(Model Predictive Control:モデル予測制御)は、システムの将来の挙動を最適化するために操作変数調節のシーケンス(制御変動)を算定する、コンピュータ制御アルゴリズムの1つのクラスを指すものである。MPCテクノロジを用いるコンピュータ制御システムは、特に製造プラント、化学プロセスプラント、石油精製等の複雑な工業システムを制御するのに適している。このようなシステムは、多くのパラメータ(流量、温度、圧力等)を持ち、それらは連続的にリアルタイム、またはほぼリアルタイムに調節または調整する必要がある。
【0004】
その名が示すように、MPCは明示モデルを使用して、プロセスが時間によってどのように進展するのかを予測する。予測を使用して、プロセスを希望の状態にする“最適”制御変動を決定する。最適制御変動はオンライン最適化の結果であり、一般に完全な非線形プログラム(“NLP(非線形計画法)”)である。しかし実際には、線形モデルが使用されるために、得られる最適化は線形プログラム(線形計画法)および二次プログラム(二次計画法)である。当初発電所および精油所の要求に応えるために開発されたが、現在ではMPCテクノロジは食品から製紙にわたる広範な商用および工業用途に用いられている。
【0005】
多くの近代的な工業プロセスプラントでは、MPCは制御機能の多重レベル階層の一部として実現されている。図1に示すブロック図、例えば工業プラント等を制御するのに適しており、プラント全体に対して希望の作動状態を維持するために、制御変数の1つまたは複数の(通常複数)のパラメータ制御を必要とする複数の作動コンポーネントを持つ。例えば1つの実施形態では、制御システム10は化学プロセスプラントであってもよい。当業者には、このようなプラントは各種の作動コンポーネント、例えば電気制御の流量バルブ、圧力バルブ、加熱冷却システム等を有し、それらを連続的に監視およびパラメータ調節または制御してプラント全体としての正しい機能を保障する必要があることは理解されるところである。
【0006】
図1のブロック図は、標準的な従来の制御階層構造とMPCを使用する階層構造との差を示す。図1において“従来の”制御階層構造は、点線12の中に示めされ、MPC制御階層構造は点線14の中に示されている。当業者にとっては明らかであるように、制御階層構造12および14の各々は、図1の点線16により示される制御信号を発生し、その信号を、例えば特定種類の工業プラントにおける被制御システムまたはコンポーネントに適用させる。図1の代表的な実施形態の例では、“被制御コンポーネント”は、流量コントローラ18、圧力コントローラ20、温度コントローラ22およびレベルコントローラ24を例として含んでいるが、被制御コンポーネントおよびシステムのクラスは、1つまたは複数の電気制御信号により調節または制御される、他の多種類の機能を含む。
【0007】
図1においては、従来の制御階層構造12は幾つかの個別コンポーネントから成っていることが示されている。制御階層構造12の中央には、1つまたは複数の単一パラメータコントローラ26があり、その1タイプは比例、積分、微分(“PID”)コントローラと呼ばれる。当業者には、各種タイプのPIDコントローラ、例えば(これに限定されないが)Honeywell,Inc.(ミネソタ州のミネアポリス)からの市販品の標準規格品を利用できることは周知のことである。このようなコントローラは単純な制御アルゴリズムを実行して、1つまたは複数の入力に応答して単一パラメータ制御出力信号を発生する。図1のコントローラ12は、さらに進み/遅れ(“L/L”)ブロック28、加算(“SUM”)ブロック30、および高/低選択論理ブロック32のような他の論理ブロックを含む。当業者には、このPID26に関連するこの追加論理ブロックにより、コントローラ12が図1の参照符号50で示された単一MPCコントローラにより実行できる、多重パラメータ制御機能を達成できることは理解されるところである。
【0008】
図1に示すような従来のコントローラ12の設計および動作は、当業者にはより良く理解されている、したがってその動作の詳細は本明細書中でさらに説明しないこととする。コントローラ12がシステムの状態を反映する各種の入力に応答して作動して、1つまたは複数の出力制御信号を発生し、システムの1つまたは複数の作動パラメータを調節することを述べることで充分である。
【0009】
さらに図1に関して、制御階層構造の上部に参照符号34で示されるプラント全体の最適化装置が、プラントの各被制御ユニットに対する最適の定常状態の設定を決定する。これらの設定値を、各被制御ユニットに組み合わされたローカル最適化装置36に送ることができる。このようなローカル最適化装置をプラント全体のレベルで可能なものと比較すると、より頻繁に作動し、またはより詳細なユニットモデルとみなすことができる。各ローカル最適化装置36は、最適かつ経済的な定常状態に対応する制御設定値を算出し、その情報を動的制約制御システムに送って実施に移す。図1の点線35で示すように、動的制約制御システムは、高−低選択論理ブロック32、PID26、進み/遅れブロック28、加算ブロック30から構成される。動的制約制御35は、プラントを1つの制約された定常状態から別の状態に移動させ、同時にその方法による制約違反を最小にする。
【0010】
図1の参照符号12のような従来の制御構造において、調整および設計にかなりの技術的労力が必要であることは当業者に理解されるところである。これは、各PID26が汎用目的であり、通常は1つの被制御変数を制御することだけが可能であり、標準規格品コンポーネントとして特定用途には調整が必要であることが主な理由である。
【0011】
MPCは、この意味では最適制御に基づく方法であり、目的関数(objective function)を最小にすることにより最適の制御変動を決定するものである。目的関数は、システムの現在および予測される将来状態、およびシステムへの将来入力に依存する。状態と入力は、明示プロセスモデルを通じて関連している。MPCの周辺で開発された理論的フレームワークは、特定のモデル形態に依存せず、多くの変形形態を認める。このモデルは、線形または非線形、連続時間または不連続時間、状態−空間または入力−出力、確定的−推計的等であることが可能である。モデルのタイプ選択における柔軟性は、本明細書に開示した本発明の実施形態によるMPCに大きい利点を提供する。
【0012】
MPC制御構造の中で、ブロック34で示されるプラント全体の最適化はシステム全体の処理であり、全体階層構造での他のレベルの最適化と制御に比較して一般に少ない頻度で実行される。他方、図1のブロック36で示されるローカル最適化、また“リアルタイム最適化”、または“RTO”として知られているものは、制御されるシステムの特性に依存して、例えば6時間毎あるいは30分ごと等に、頻繁に行われる。
【0013】
図1のブロック50で示されるMPC機能は、定常状態計算と動的計算に通常分割され、MPCのこれら各フェーズは、例えば1〜2分毎に実行される。動的MPC計算は、広範囲に研究されてきている(例えばS.J.QinおよびT.A.Badgwellの“An Overview of Industrial Model Predictive Control Technology(工業モデル予測制御技術の概観)”,In Fifth International Conference on Chemical Process Control,J.C.Kantor,C.E.Garcia、およびB.Carnahan,Eds.,No.93 In AlChE Symposium Series 316,1997、232-256頁)。定常状態MPC計算の目的は、MPCコントローラ50が実行するたびに、ローカル最適化装置36からの目標を再計算することにある。何故ならばシステムに入る外乱またはオペレータからの新しい入力情報は、最適の定常状態の位置を変えるからである。MPCアルゴリズムを定常状態計算と動的計算に分けることは、例えばC.Cutler,A.Morshedi、およびJ.Haydelにより、“An Industrial Perspective on Advanced Control(高等制御における工業予測)”,in AIChE National Meeting,Washington,D.C.,1983に言及され、今日では工業用MPCテクノロジでは常識である。定常状態アルゴリズムは、ローカル最適化装置36よりも頻繁に作動する必要があるため、詳細度の劣るモデルを使用することができる。例えば定常状態計算は、動的最適化に用いられる動的モデルの定常状態変形例を使用することができる。再計算された最適定常状態は、次に動的MPCアルゴリズムに引き渡され、このアルゴリズムによって1つの制約された定常状態から別の定常状態に行く最良の方法を決定する。この定常状態目標の最適化は、動的MPC計算にMPCアルゴリズムを含めることなく、フィードバックをMPCアルゴリズムに組込む代わりの方法である。本発明の開示では、定常状態計算は線形経済目的によって駆動されることを仮定するが、本発明は非線形(例えば2次またはさらに高次)目的関数を含む用途において有利に実施されることを意図している。
【0014】
MPCは、さらに2つのカテゴリ−“公称MPC”および“ロバストMPC”−に分割され、これらはプロセスモデルに関する仮説に依存する。公称MPCは、完全なモデルを仮定するのに対し、ロバストMPCはモデルの不確定性を考慮する。
【0015】
MPC階層構造の最下層には、図1のブロック52で示されるデジタル制御システム(“DCS”)がある。DCSは、システム制御の基本的な動的レベルを表わし、したがって階層構造の全レベルにおいて最も頻繁に、例えば毎秒(または特定の用法によってはさらに高い頻度で)実行される。
【0016】
動的最適化におけるモデル不確定性の問題点は、研究者から多大の注目を集めたが、モデル不確定性が定常状態目標計算にどのように影響するかには、ほとんど関心が払われてこなかった。
【0017】
【発明の概要】
本発明は、モデル不確定性の明確な原因である定常状態目標計算の新しい公式に関するものである。本発明の一構成によれば、モデルの不確定性を組込むときは、定常状態目標計算に関連する線形プログラムは、高度に構造化された非線形プログラムとして書き直すことができる。本発明の別の構成によれば、主双対内点法を適用して、特殊構造の結果を利用できる。既知の不確定性記述を持つ特性ゲインパラメータGを持つシステムに対しては、本発明は前記システム操作変数に対して定常状態目標を選択する方法と装置を提供し、それにより既知の不確定性記述内のパラメータGの全可能値に対して、システム制御変数を定常状態で実行可能なようにする。システムパラメータGの公称推定値~Gが作られ、また本発明の別の構成によれば、計算される定常状態目標の選択は、~GがGに近付くときに、既知の不確定性記述を条件として、真のシステムGに対する制御目的を最小、または最大にする作動定常状態目標に近付くように選択される。~G=Gであれば、計算される定常状態目標は、既知のモデル不確定性を条件に、真のシステムGに対する制御目的を最小、または最大にする(本明細書中で使用する用語“極値化する”は特定の関数を最小化、または最大化の何れかを行うことの数学的な目的を指すのに用いられる)。
【0018】
【発明の実施の形態】
本発明の前述およびその他の特徴および構成は、添付の図面を参照した次の実施形態の説明によってさらに良く理解されるであろう。
【0019】
図2によれば、概略ブロック図によって、図1の制御階層構造におけるモデル予測制御(MPC)ブロック50の具体的な構成が示されている。前述のように、また図2から明らかなように、MPCブロック50は、定常状態計算と動的計算に分割される。“プラント”はまた図2中でブロック60により示されている。前述のように、本明細書中に用いられる用語“プラント”は、当業者がモデル予測制御テクノロジを適用できると考える化学プロセス施設、精油施設等のすべての各種システムを指すものとする。プラント60の正確な特質は、本開示の目的には重要ではない。
【0020】
明瞭にするために、MPCコントローラの実現化の全特性を必ずしも本明細書で説明していない。すべてのこのような実際の具現化の展開においては、すべてのこのようなプロジェクトと同様に、ケース毎に相違する多くのエンジニアリングおよびプログラミング上の決定がなされて、開発者の特定のゴールおよびサブゴール(例えばシステムおよびビジネスに関する制約に従う)を達成することは勿論である。さらに、問題のある環境に対し、正しいエンジニアリングおよびプログラミングの実行に注意を払う必要がある。このような開発作業は、複雑で時間のかかるものではあるが、この開示の利益を利用するコントローラシステム設計の分野の当業者にとっては日常的な仕事であると考えられる。
【0021】
図2のブロック62で示される線形MPCに対する定常状態目標計算は、線形プログラム(“LP”)の形を持つ。学術文献の大多数は、図2のブロック64で示される動的問題に主眼を置き、定常状態の問題を採り上げるものは少ない。定常状態LPに関連する問題を研究することは、工業実務家に委ねられている。工業界において用いられている大抵のモデルは、コントローラを駆動する線形経済理論によって線形であるため、その結果はLPになる(前述のように、本発明は非線形(例えば2次または高次の)を含む用途に有利に実用化できことを意図している)。
【0022】
具体的には、図2に図示された予測コントローラ50およびプラント60を含む総合システムは次のように作動する。まず、MPC50は動的および定常状態計算を実行して、プラント60に最適の“入力”u*を反映する制御信号を発生する。図2に示すように、入力u*は、ライン66でプラント60に送られる。したがって図2のライン66は、MPCテクノロジの“実際の”用途中で、何が被制御コンポーネント(例えばバルブ)に適用される複数の電気制御信号であり、それがプラント中の複数の被制御変数(例えば圧力、流量、温度)を制御するのかを示している。
【0023】
他方、プラント60の動作は、ライン68上で送られる図2に示す複数の“出力”yによって記号で表わされ、したがってライン68は、プラント60の作動状態を反映する複数の電気信号を表わす。
【0024】
図2のシステム中で、1つまたは複数の出力yは、フィードバックされて定常状態目標計算ブロック62への入力として提供される。定常状態目標計算ブロック62は、プラント出力yの関数として、またライン72上で送られる“目的”の関数として、それぞれいわゆる“目標”入力および出力のusおよびysを発生するように作動する。目標入力usおよびysは、ライン70上を送られる。目標入力usは、計算ブロック62で行われる計算に基づいて、プラント60のMPCモデル化に基づいて予測され、その結果プラントが目標出力ysを発生するように作動するプラント60への入力である。
【0025】
当業者には、目標入力usを直接プラント60に適用することの不都合な特定の制約、または問題点が実際の状況にはあり得ることは理解されるであろう。目標入力usおよび目標出力ysの関数として、プラント60への“最適”入力u*を誘導することは動的レギュレータ64の機能である。
【0026】
図2が示すものを簡単な例で示すこととする。この例では、“プラント”60は水コックである。“出力”yは、コックからの水の流量を表す値である。この例における“目的”は、出力(即ち流量)を特定のゼロ以外の値に維持することである。この目的が与えられていることから、定常状態目標計算ブロック62は、MPCモデルに基づいて、目的を達成する出力yを実現するために予測できる目標入力usおよび目標出力ysを導き出す。この例における単一“入力”は、コックを開く範囲を表す値となる。動的レギュレータ64は、次にレギュレータ64の動的計算に基づいて、目標出力ysを得る目標入力usおよび目標出力ysの関数としての最適入力u*を計算する。
【0027】
水コックの例は、定常状態制御および動的制御の異なる役割を示す。例えば仮説システムの目的が、コックからの水の流出量を定められたx(cm3/秒)の割合に維持することと仮定する。システムが、コックを閉じた状態(即ちt=0でy=0)で作動を開始すると仮定すると、定常状態目標計算ブロック62は、目標入力usを発生し、これはコックのそのMPCモデルに基づいて、x(cm3/秒)の流量をもたらすことになる。この目標入力を直接コックに適用すると、コックは目的の流量を達成するのに必要な範囲にまで即時開くことを要求される。当業者には、この事が望ましくもなければ可能でもないことは理解される。代わりに、動的レギュレータ64が作動して、ライン70上に提供された目標入力usおよび目標出力ysに基づいて“最適”入力u*を導き出す。この例においては、“最適”入力はコックをさらに徐々に開くことに反映される。時間と共に、“最適”入力u*と目標入力usが収束すると予測される。
【0028】
前記の極めて簡単な例においては、プラント60へは単一入力およびプラント60からは単一出力だけであった。しかし一般的な実施形態においては、プラントには複数の入力と複数の出力が存在すると考えなければならない。このような場合には、値uおよびyはベクトルである。
【0029】
図2に示すMPCシステムは、制御テクノロジのいわゆる“入力/出力”モデルを表わす。入力/出力モデルでは、システム(即ちプラント50)の現在の出力は、システムの過去の入力の関数として表わされる。数学的に表現すれば、yk=f(uk、uk-1、uk-2、・・・)である。制御テクノロジの代替モデルは、“状態空間”モデルとして知られている。状態空間モデルでは、システムの現在の状態はシステムの前の“状態”およびシステムへの前の入力の関数として表現される。変数xで表わされるシステムの“状態”は、システムの現在の運転状態を反映する1つまたは複数の値である。システムの“状態”は、システムの“出力”とは厳密に言えば同一ではないが、2つの用語は全く異なるものではない。システムからの出力ではない、またはシステムの外から認知さえできない状態変数も存在することがある。数学的に表現すれば、状態空間モデルでは、現在の状態xk+1は、以前の状態xkおよび以前の入力uk(即ちxk-1=F(xk、uk))の特定の関数である。一方現在の出力ykは現在の状態xk、(即ちyk=G(xk))の特定の関数Gである。
【0030】
図3には、状態空間モデルに基づくMPCシステムが示されている。図3のシステムは特定の構成において図2のコントローラとは相違するMPCコントローラ50'を含む。しかし図3の実施形態においては、図2の場合と実質的に同一のエレメントには同一参照符号を付している。コントローラ50と50'との主要な差は、コントローラ50'中に、入力としてライン68上のプラント60の出力yおよびライン66上のプラント60への“最適”入力u*の両方を受け取るエスティメータ・ブロック74が含まれていることである。これらの入力に基づいて、エスティメータ74は、プラント60の現在の状態を計算し、および/または推定し、この情報およびライン76上の出力を定常状態目標計算部62に送る。
【0031】
図3の実施形態においては、定常状態目標計算部62は目標状態xsおよび/または目標出力ys、および目標入力usを計算する。図2の実施形態におけるように動的レギュレータ64は定常状態目標計算部62の出力を使用して、プラント60への最適入力u*を計算する。
【0032】
特に、以下の説明から当業者に明らかになるように、本発明は使用されるモデルからは独立しており、また入/出力モデルまたは状態空間モデルの何れの状況でも有利に実現化できる。特に本発明は、図2および3のシステムにおける定常状態計算ブロック62の動作に関するものである。
【0033】
当業者には、すべての線形モデルは、それが状態空間、ステップ応答、パルス応答、またはその他の何れであれ、定常状態では、下記の形で表現できることが理解されるであろう。
【0034】
【数20】
この場合△y=[△y1・・・△yn]T∈Rnyは、現在の定常状態出力および前回の定常状態出力の間の変化を示し、また△u=[△u1・・・△un]∈Rnuは、現在の定常状態入力および前回の定常状態入力の間の変化を示す。
【0036】
【数21】

この場合y=[y1・・・yny]Tおよびu=[u1・・・unu]Tは、将来の定常状態出力および入力をそれぞれ含むベクトルであり、またyk-1およびuk-1は、それぞれ、yおよびuの以前に測定された値であり、G∈Rnyxnuはシステムに対する定常状態マトリックスである。ゲインマトリックスGは、入力変化に対する出力変化の感度、または出力変化間の関係を表わす。LPは、目的関数Jsを最小化または最大化(即ち極値化)することにより、最適定常状態目標を見出すことを試み、この目的関数は、例えば制御システムのオペレーションに関連する経済的要件を表わす。
【0038】
【数22】
一方、定常状態入力および定常状態出力間の前記の式(1)の関係を維持し、またプロセス仕様から生じる入力および出力制約を考慮する。
【0040】
【数23】
また、得られた解が、動的MPC計算が実現不能にならないことを保証する。
【0042】
【数24】
(本文中で用いられている、システム操作される(入力)変数およびシステム制御される(出力)変数に適用される“実現可能”という語は、前記の式(5)および(6)に示すような、所定のプロセス仕様から生じる上限および下限の制約に変数が違反しないことを意味する。逆に“実現不能”という語は、これらの制約に対する違反を指す。このような制約は、変数を予め定められたプロセス作動領域に限定する範囲を構成する。)
【0044】
式(7)において、Nは動的MPC計算の制御水準を指し、△-uiおよび△-uiは動的MPC計算における変化率制約に対する最小および最大範囲である。式(5)および(6)において-uiおよび-uiは、uiに対するそれぞれ最小および最大範囲であり、出力yiでも同様である。式(7)は、定常状態目標が動的MPC計算における変化率制約または速度制約に従うことを保証する。
【0045】
LPにおけるリアルタイム実現不能を避けるために、いわゆる“緩和”変数ε=|ε1・・・εny|T≧0∈Rnyを加えることにより、式(7)の厳格な出力制約-y j ≦yj≦-yjをゆるやかな制約に変換することが一般的である。前記“緩和”変数は制約中の特定量の違反を認める。
【0046】
【数25】
違反のサイズは、それを目的関数に追加することにより最小化される。
【0048】
【数26】
ここでciは、目的関数に関連する入力変数uiのコストまたは加重を表わし、またdiは出力変数yiのコストまたは加重を表わす。
【0050】
さらに工業的具体化において、出力フィードバックの結果としてバイアスをモデルに導入することができる。モデル予測と現時点での測定された出力との間の差異は、出力における一定のステップ外乱に起因すると仮定される。MPCフレームワークに組み入れることのできる他の可能なタイプの外乱モデルが存在するが、本開示は出力外乱モデルのみに限ることとする。
【0051】
【数27】
モデルバイアスbは、現在の予測された出力yと現在の測定された出力
<y=[<y1・・・<yny]T∈Rnyとの間の比較に基づいている。
【0053】
【数28】
バイアスは前記の式(1)からのモデルに加えられる。
【0055】
【数29】
この時の問題は、以下のとおりである。
【0057】
【数30】
ただし、
【0059】
【数31】
が条件であり、i=1,・・・,nuおよびj=1,・・・,nyである。LPは、一般に動的MPC計算(2次プログラムの形を持つ)よりも簡単と考えられ、線形プログラミングの基本、シンプレックス法を用いて一般に解かれる。
【0061】
入力および出力の代わりに、変動△uおよび変動△yを直接計算するのが一般である。最終公称定常状態目標計算は次の式で表わされる。
【0062】
【数32】
ただし、
【0064】
【数33】
が条件である。ここで、
【0066】
【数34】
cおよびdは目的関数加重から成るベクトルである。ベクトルeはすべてを1とするベクトルである。
【0068】
【数35】
また、Au∈R4nuxnuおよびbu∈R4nuが以下の式で与えられる。
【0070】
【数36】
一方、Ay∈R2nyxnyおよびby∈R2nyは以下の式で与えられる。
【0072】
【数37】
さらに△yは、△uとは線形関係にあるから、すべての問題は△uとεに関して表わすことが可能であり、決定変数の数が減少する。得られるLPを標準形に当てはめ、最適化装置に送る。当業者にとっては、前記のAy、Auおよびby、buの形式は、この問題に使用のできるマトリックスの特定例であることが認識されるであろう。さらに他の形式も使用できる。本開示ために、Ay、Auおよびby、buの形式は、所定の用途における近い将来の制御目的で規定されるように、さらに一般的であることが理解されるであろう。本開示はAy、Auおよびby、buの一般形式を扱うことを意図するものである。示された緩和公式は、この分野の実務家により現在用いられている多くの可能なものの一つであることもまた理解されねばならない。本開示は、他の多くの実現可能な実施形式に適用し得るものと信じる。
【0074】
ロバストLPは、式(15)の公称上の問題の定常状態ゲインマトリックスGにおける不確定性を明確に説明する。可能なプラントの数学的パラメータ化は、不確定性記述として知られている。記述は多くの形式を持つことが可能であり、数学的、または統計的に表現することができる。モデルの識別において、プロセスノイズおよびモデルパラメータが正規分布またはガウス変数であると仮定されるときは、自然不確定性記述はパラメータ上での楕円形領域である。図4に示すようにパラメータベクトルθ=|θ1・・・θnθ|T∈Rnθは、結合信頼領域を記載する次のセットの中にあると仮定される。
【0075】
【数38】
楕円の中心θc(図4の参照符号80により示される)は、正規分布の平均であり、対称性マトリックスV>0は分布の共分散(または共分散の推定)である。(記号“A>0”は、“Aは正に限定される”を意味する)。マトリックスV-1は、楕円形のサイズと方向を定める。特にV-1の固有値の逆数の平方根は、楕円形の短軸の長さであり、またV-1の固有ベクトルは短軸の方向である。
【0077】
式(21)の別の形式はいくつかの場合に有用である。式(21)の楕円形80により限定され、図4において記号80により示されている信頼領域は、次のように書き直すことができる。
【0078】
【数39】
パラメータは、信頼レベルがγ∈[0,1]であるとして既知である必要性から、前記の式の項目αは来ている。
【0080】
【数40】
この場合Φ(x)は、ゼロ平均とユニット分散を持つ一変量正規分布関数である。
【0082】
【数41】
αの値は、Vが真の共分散の推定である場合でも、すべてのγに対して存在することが常に保証されている(例えばY.Bard,“Nonlinear Parameter Estimation(非線形パラメータ推定)”,Academic Press,Inc.,New York,1974を参照のこと)。式(22)に対して、凸形を維持するためγ≧0.5であり、またはα≧0となる。式(22)により与えられる不確実性記述は、Vのランクの不足を認めるために、式(15)よりも一般的である。
【0084】
共分散マトリックスVがフルランクを持たないときは、楕円形は縮退し、正確に判明しているパラメータに対応する特定方向に崩壊する。楕円が崩壊する方向は、ゼロである関連固有値を持つ固有ベクトル(または短軸)に相当する(即ち、ゼロ以外の値ZがゼロであるV1/2Zを発生する方向)。
【0085】
楕円形不確定性の類似の考察は、また、A.Ben−TalおよびA.Nemirovskiの“Robust Solutions of Uncertain Linear Programs via Convex Programming(凸型プログラミングの不確定線形プログラムのロバスト解法)”,tech.Rep.、凸型プログラミング(凸計画法)の一般的コンテクスト中の楕円形領域のさらに正式な処理を示すTechnion Institution of Technology,Haifa,Israel,1994および最適制御に使用するための楕円形不確定性記述の使用を提案するS.Boyd,C.CrusiusおよびA.Hansson,“Control Applications of Nonlinear Convex Programming”,Journal of Process Control,(1998)において記載されている。
【0086】
定常状態目標計算において、不確定性パラメータθは、定常状態ゲインマトリックスGのエレメントである。giをGのi番目の行を記載する列ベクトルとする。
【0087】
【数42】
出力は、独立したランダム変数により乱されると仮定する。何れの出力も他の出力とは相関を持たない。この場合には、ブロック対角共分散マトリックスを、ゲインマトリックスの各行に対する個別の共重合マトリックスから成るプロセスゲインに対して構成できる。特にViがi番目行に相当する共分散マトリックスであるときには、全マトリックスに対する共分散は次の形で与えられる。
【0089】
【数43】
出力が実際に相互相関を持つときは、Vの対角外エレメントはゼロでなくなる。何れにしろ普遍性を失うことなくgは公称的に~gであり、共分散Vを持つと仮定することが可能であり、結果として次の式が得られる。
【0091】
【数44】
ここで、ζは、全マトリックスに対する楕円形を定義する。これは、制約に関する不確定性に帰結する問題を提起するのに最も自然な方法である。公称的LPにおいてゲインマトリックスGは、出力制約において(場合によっては密な)マトリックスAyを予め乗算される、これにより出力の線形組み合わせが得られる。出力制約のi番目のコンポーネントは、次の式で得られる。
【0093】
【数45】
一般的に、前記のタイプの楕円形は、制約のある不確定性を取り込むことを要求される。しかし、Ayのエレメントの大部分が出力上の単純な範囲に当てはまるようにゼロであるならば、楕円形不確定性記述を簡単化することは可能である。
【0095】
単純な範囲に対しては、i番目の制約に予め乗算する一定のスカラー係数βが存在する。
【0096】
【数46】
制約の各コンポーネントは、ゲインマトリックスの単一行だけに依存する。したがって楕円形は、単一行に対してのみ限定することができる。i番目行に対するゲインを公称的に~giとする。共分散はViである。楕円形は次の式で表わされる。
【0098】
【数47】
さらに、楕円形不確定性を多角形または単純な四角形として近似化するのが望ましい時点が存在する。
【0100】
楕円形制約が結合信頼領域によって解明できると、四角形制約は結合信頼間隔によって(または楕円に対する近似化として)解明できる。図5の参照符号82により示される単純四角形制約は、楕円の最小および最大範囲を与える。さらに、楕円を近似化するために、複雑な多角形を使用することも可能である。四角形制約を含む一般的多角形は、Gのエレメントgijの特定の線形組み合わせの範囲として表わすことができる。不確定性記述βは、このときには次の式で表わされる。
【0101】
【数48】
楕円性制約を近似化するために用いられる場合の四角形制約は、楕円形制約よりもより保守的であり、したがってより保守的な制御作用に向かう。式(27)、(30)および(31)の各々により記載された楕円形および四角形制約は、ロバストLPに用いられるゲインの現実的な値を定義する不確定性記述Uを表わす。
【0103】
ロバストLPコンセプトを示す例として次の線形定常状態システムを考える。
【0104】
【数49】
Δu∈R2および△y∈Rである。gの公称値を次の値とする。
【0106】
【数50】
出力は、一つであるためにg=g1およびε=ε1である。
問題に対する分散は次の式の通りである。
【0108】
【数51】
この例に対しては、バイアスおよび緩和変数は無視される。マトリックスエレメントは、α=2.33に相当する99%の確率レベルγを以って判明していることが必要である。楕円形不確定性は、次のデータを持つ四角形制約として近似化することができる。
【0110】
【数52】
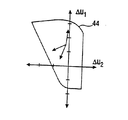
楕円形不確定性記述およびその四角形近似化は図6に示されている、この図では楕円形不確定性記述は参照符号84により示され、四角形近似化は参照符号86により示されている。
【0112】
式(15)の公称上の問題における出力制約を考えるときに問題が起きる。制約は、限界変数に対応することがある。例えば、反応容器の温度限界、またはユニットへの最大許容供給率である。制約における不確定性、または“あいまい性”は、公称値が上限または下限において拘束力を持ってはいても、実際の値は制約領域の外側に存在する可能性があることを意味する。
これを確かめるために、下記の制約を例に加えることができる。
【0113】
【数53】
制約により限定される実現可能な領域は、図7の参照符号88により示された多角形の内部に相当する。この領域88は、ゲインの公称値と見なす。
【0115】
図7の参照符号90により示された下側の境界線は、出力△y1≧-2の下側領域を示す。
ライン90は次の式により与えられる。
【0116】
【数54】
gにおける不確定性が、制約における不確定性を生じさせる。図8は、公称制約とその信頼性領域を示す。制約が拘束力を持つケースを考える。不確定性は、真のプロセスを信頼性限界内の何れの位置にも強制的に存在させることが可能であり、実現可能なセットの外側にもそれが容易に位置することのできることを意味する。領域を表わす式は次の形で示される。
【0118】
【数55】
ここで、‖・‖は標準ユークリッド・ノルムである。各出力制約はある程度の不確定性を含む。上側の制約△yi≦4からの不確定性が含まれるとき、新しい実現可能なセットの範囲のプロットは図9に示したようになる。範囲は、参照符号92により示された実線で与えられる。図9は、オリジナルの実現可能領域を参照符号94により示した点線で、また楕円形の四角形不確定性近似化を参照符号96により示した破線で示す。四角形不確定性は、常に楕円形不確定性よりも保守的な制御作用に導く。四角形不確定性記述は、物理的に実現不能な外側にあるゲインまたはプラントを含む。コントローラは、不確定性記述のサイズしたがってロバスト性の増大に対応して、さらに多くの可能なプラントを考慮することが要求されるため、実現可能な領域のサイズは、さらに保守的なコントローラに対応して減少する。これが良く知られているロバスト性/性能のトレードオフである。
実現可能な領域は、ゲインの可能なすべての値に対する実現可能な出力を発生する入力のセットとして定義できる。
【0120】
【数56】
ここで、Uは前記の不確定性記述の一つである。
【0122】
制約に影響を及ぼすゲイン不確定性の外に、目的関数に対する影響を有する。
【0123】
【数57】
入力に対する目的のグラディエント(勾配)をfとする。
【0125】
【数58】
この例に対してcおよびdは次により与えられるものと仮定する。
【0127】
【数59】
不確定性はfの値を変化させる。fは公称的には~fである。
【0129】
【数60】
fは、-fと-fとの間のあらゆる値を持つことができる。
【0131】
【数61】
図10は、目的関数における不確定性の影響を示す。目的関数が変化すると、LPの解が変化する。1つの解は、目的関数にゲインを含み、それらを最小化する。しかし制御の見地からは、これは好ましくない場合がある。これに代わる制御方針は、ゲインの“最良の推定”、または公称値を最小化することである。プロセスのゲインに対する最良の推定を用いて、経済的最適の方向にプロセスを駆動することが目標であるが、プロセスがあらゆる妥当なゲインに対して実現可能であることを保証する入力(不確定性記述により取得したもの)だけに制約する。ゲインの公称値を用いるときには、ロバストLPに対する目的関数は次の形になる。
【0133】
【数62】
簡単な例であるが、問題の本質を示している。モデル不確定性は、問題の構造を強制的に変化させる。制御理論に一般的に用いられる線形制約は非線形となる。
【0135】
前記の例において、最適解をグラフ的に求めることが可能であった。実際には、下記の最適化問題を解く必要がある。
【0136】
【数63】
ただし、
【0138】
【数64】
が条件である。
【0140】
式(43)および(44)は、発明の開示された実施形態によるロバストLPを構成する。ロバストLPは、MPCアルゴリズムの実行中あらゆる時間ステップで解かれるのが望ましい。解の時間は、好ましくはそれをリアルタイム設定に用いられるべきであるから、数十秒(またはそれよりも小さい)のオーダーである。その解は、目標として動的MPC計算ブロック(図2および3の例としての実施形態のブロック64)に送られる。問題は、△yに関係する問題を除外して△uおよびε1だけについて作成されている。これは簡単のために、また問題の構造を解説するために行われた。当業者には、この問題は出力が明確に均等制約を表わすようにも記述できることは理解されるであろう。
【0141】
次に式(43)および(44)の最適化問題を2次コーン上の最適化問題として公式化することが望ましい。これを解説するために、下記の式(45)のさらに単純な問題のみが考える必要がある。
【0142】
【数65】
ただし、
【0144】
【数66】
が条件である。前記は実際には半無限プログラムである。半無限プログラムは一般に次の形を持つ。
【0146】
【数67】
すべてのθ∈Uに対し、h(x,θ)≦0
ここで、f:Rn→Rおよびh:Rn×Rm→Rpである。θは一般に1組のパラメータであり、また大抵のエンジニアリングの問題に対してUは閉じており凸形である。ベクトルxは有限であるのに対し、セットUは無限である。有限数の変数は無限の制約の中に現れる。式(47)の問題は、ロボット工学から構造設計におよぶ多くの分野に出現する。R.HettichとK.Kortanekの“Semi-infinite programming:Theory,Methods and Applications(半無限プログラミングの理論、解法および適用),”SIAM Review,35(1993)、380-429頁は、半無限プログラミング並びに現在の理論および解法が適用された各種の領域の論評を提供している。
【0148】
式(47)におけるタイプの制約を扱うための最も簡単な方法は、次の点を認識することである。
【0149】
【数68】
が、
【0151】
【数69】
と等価である。
下記の定義を使用すると、
【0153】
【数70】
式(46)および(47)の半無限プログラムは次の形となる。
【0155】
【数71】
各種のエンジニアリング問題に対してH(x)は、制約およびパラメータセットの性格によっては識別可能、または識別不能のいずれかである。E.Polakによる論評、“On the Mathematical Foundations of Non-differentiable Optimization in Engineering Design(エンジニアリング設計における微分不可能な最適化の数学的ファンデーション),”SIAM Review,29(1987)、21-89頁は、H(x)が識別不能であるとき、エンジニアリング設計のフレームワークの中でこの問題クラスを考察し、また前記に引用されたHettichおよびKortanekの調査は、H(x)が識別可能なときにこのケースを考察している。最適化技法は、問題毎に適応させる必要がある。
【0157】
多くのロバスト最適化問題は、半無限最適化問題として変形することができる。特定クラスの問題に対しては、式(48)の制約は推計的なフレームワークの中で解釈される。確率的な意味での次の制約を満足することが目標である。
【0158】
【数72】
ここで、与えられた平均と分散を持つランダムに分布する変数θ∈Rmを用いる。この不確定性を確率的な制約として扱う古典的な方法は、推計的プログラミングとして知られている。事実、大抵のロバスト最適化問題は、最初に推計的最適化問題として生じる。すなわち、各代表例は、特定の分野に対し共通である。推計的プログラミングは、オペレーションズ・リサーチおよび経営科学の分野においてより普遍的に用いられるのに対し、半無限プログラミングはエンジニアリング問題に対してより頻繁に適用される。しかし両者は共通のテーマを根底に持つ。これは、特にロバストLPにおいて当てはまる。推計的プログラミングの詳細な考察は、A.PrekopaのStochastic Programming(推計的プログラミング),Kluwer Academic Publishers,Boston,1995,chapters 10-11およびP.kall and S.W. WallanceのStochastic Programming(推計的プログラミング),John WileyおよびSons,New York,1994,chapter 4に見出すことができる。R.Hettich and K.Kortanek,“Semi-infinite Programming:Theory,Methods and Applications(半無限プログラミングの理論、解法および適用)”SIAM Review,35(1993),380-429はドイツ語で書かれているが、半無限プログラミングに関する情報に関する優れた著作である。
【0160】
ロバストLPにおける楕円形不確定性のケースを考察する前に、楕円形が四角形制約により近似化される簡単なケースを考える。問題データの中に不確定性がある場合、半無限最適化の目標が、1組の線形制約を条件として線形関数を最小化することにあるときは、半無限化LPはより多くの制約を持つ標準LPとして構成することができる。不確定パラメータθがマトリックスAのエレメントに一致し、目標が下記であると仮定する場合には、
【0161】
【数73】
ただし、
【0163】
【数74】
を条件として、b∈Rmおよびx∈Rnであると、問題を解くための簡単な方法は、Aのすべての可能な値を単純に列挙することである。これが有効な方法であることの理由は、LPの解が実現可能なセットの範囲上に常にあることをその根拠としている。したがってすべての可能な値を列挙することにより、半無限問題は不均等制約の数を増やした有限問題に置き換えることができる。すべての制約i=1,・・・,mに対して、エレメントをそれらの上下の領域により置き換えることにより生成される2nの可能なエントリーが存在する。これを行うことにより以前の問題は、m2n制約を持つ下記の問題に置き換えることになる。
【0165】
【数75】
ただし、
【0167】
【数76】
を条件とする。
ここでの例において、nu入力および出力上のm制約が存在するならば、m2nu追加制約をこの問題に加える必要がある。出力に単純な範囲を持つ10×10システムに対しては、これは2万以上の制約に匹敵し、問題のサイズは指数関数的に増大する。
【0169】
式(47)の半無限問題がコーンとして出現する制約を持つ凸形であるときは、問題は有限次元凸形最適化として書き直しできることが実証されている。例えば、前記のBen-TalおよびNemirovskiの引用を参照のこと。これは、2次コーンを表わすことのできる関数(すなわち2次コーンとして形成できる関数)のアイディアを導入するY.NesterovおよびA.Nemirovskyの“Interior-Point Polynomial Methods in Convex Programming(凸形プログラミングにおける内点多項式法),”Studies in Applied Mathematics,Vol.13,SIAM,Philadelphia,PA,1994を一部基本としている。制約を表わす2次コーンを持つ半無限最適化は、2次コーンによる最適化としてより解明できることが実証されている。
一般に2次コーンプログラム(“SOCP”)は下記の形を持つ。
【0170】
【数77】
ここで、x∈Rn、bi∈Rmおよびg∈Rpである。この場合にも‖・‖は標準ユーグリット・ノルムであり、またAi、c、ci、diおよびGは適切なサイズを持つ。広汎な非線形凸形最適化問題は、特殊ケースとしての線形プログラミングおよび2次プログラミングを含むSOCPとして形成することができる。ロバストLPはこのカテゴリに当てはまる。
【0172】
ロバストLPをこの形で形成することには、2つの長所が認められている。
第1は、オリジナル半無限最適化が有限制約セットを持つ標準最適化問題の形で書き直しされる。
第2は、primal-dual interior point methods(主双対内点法)をこのさらに普遍的な問題クラスに延長するためのおびただしい研究が行われ、その結果、新しい効果的な解法が生れた。
【0173】
2次コーンプログラミングのための内点法を考察する資料の1例は、上に使用されたNesterovおよびNemirovskyの文章である。同様に上に引用されたBoyd,CrusiusおよびHanssonは、SOCPを最適制御に際してどのように用いることができるかを示す。後者は、ロバスト最適制御問題を示す、その中でコスト関数のl∞基準(即ちピーク追跡エラー)は、有限インパルス応答モデルにおける不確定インパルス応答係数に対して最小化される。この参考資料もまた、SOCPとしてこの問題がどのように有効に解くことができるかを考察する。この参考資料は、またSOCPをフィードバックコントローラの最適設計に用いる方法を解説している。これらの用途は、不確定線形制約が2次コーンとして形成できるという事実に基づく。上に引用されたBen-TalおよびNemirovskiは、汎用線形プログラムを考察している。
【0174】
【数78】
ただし、
【0176】
【数79】
を条件とし、楕円形により記載されたデータai内の不確定性を用いている。
【0178】
【数80】
半無限プログラミングから前記の制約は楕円形による最大化と等価である。
【0180】
【数81】
これは、2次コーン以外の何物でもない。結果は下記のロバストLPである。
【0182】
【数82】
ただし、i=1,…,mに対し、
【0184】
【数83】
を条件とする。
確率的にランダムな線形制約(即ち、線形h(x、θ)に対する式(51)と正規分布)は、等価の非線形制約として形成できることは、推計的プログラムミングの分野の当業者によりある時点で知られていた。しかし非線形等価は、2次コーンとして認識されてはいなかった。M.S.Lobo,L.Vandenberghe,S.BoydおよびH.Lebretは、“Applications of Second-Order Cone Programming(二次コーンプログラミングの応用)”,Linear Algebra Appl.,(1998)の中でSOCP用の結論においてこの関係を明確にしている。
【0186】
線形確率的制約を検討することとする。
【0187】
【数84】
aiが平均~ai および共分散Viを持つと、ai Txは平均~ai Tおよび分散xTVixを持つ。制約は、ゼロ平均およびユニット分散を持つ等価制約として表わすことができる。
【0189】
【数85】
したがって確率は次の式により表わすことが可能である。
【0191】
【数86】
または2次コーン制約である等価の次式である。
【0193】
【数87】
これは、一般確率制約の特殊なケースであるが、極めて重要である。一般の確率的制約(式51)は算出に極めてコストがかかる。何故ならば関連する確率分布関数を判定するための半無限、多分散確率積分が含まれるからである。当業者には、これと異なり、2次コーンは非常に効果的に判定できることが理解されるであろう。
【0195】
ロバスト定常状態目標計算は次に確率論的に計算することができる。
【0196】
【数88】
ただし、
【0198】
【数89】
を条件とする。式(62)における半無限制約は、プロセスゲインの特定の不確定性に対して確率γを固定するために出力制約を必要とすると考えることができる。
これを明確に知るために半無限制約は、コンポーネント毎に書き直すことができる。
【0200】
【数90】
これは次の形に書き直すことができる。
【0202】
【数91】
ここで、Diは次の式により定義される。
【0204】
【数92】
また、gは縦方向に並べられたGの行のベクトルである。不確定性記述Uは楕円形記号ζとなっていた。式(57)から制約は次の式で表わされる。
【0206】
【数93】
これは2次コーンである。
結果は次の問題となる。
【0208】
【数94】
ただし、i=1,…,mに対し、
【0210】
【数95】
を条件とする。
完全なロバスト定常状態目標計算は、次にSOCPとしてのモデル予測制御(式(43))の形で表わすことができる。
【0212】
【数96】
ただし、i=1,…,mに対し、
【0214】
【数97】
を条件とする。
ロバストLPの特性を説明するための例を考察することとする。本例は、モデルミスマッチのために公称LPにより算出された目標は不十分な制御になるのに対し、ロバストLPにより算出された目標は、非常に良好な制御を提供する事例を示している。
【0216】
下記の式より得られる単純な信号入力、信号出力(SISO)定常状態モデルを考える。
【0217】
【数98】
ここで、ukおよびykは、k時点における各入力および出力であり、gはモデルゲインであり、またbはモデルバイアスである。ゲインは公称的には
【0219】
【数99】
であるが、真のプラントゲインは下式で与えられる。
【0221】
【数100】
ここでは特定の楕円形の中にあると仮定する。また入力および出力についてユニット制約を仮定する。
【0223】
【数101】
目的は次の式により得られる。
【0225】
【数102】
ロバストLPは、線形目的関数の外に2次目的関数を含む。式(69)の拡張である下記の最適化問題を考える。
【0227】
【数103】
ただし、i=1,…,mに対し、
【0229】
【数104】
を条件とする。
ここで、マトリックスQは正−有限および対称マトリックスであり、システムに存在の可変緩和および/または他の決定変数の加重が可能である。
前記の最適化は、等価的に次の形で表現することができる。
【0231】
【数105】
ただし、i=1,…,mに対し、
【0233】
【数106】
を条件とする。
【0235】
最適化問題(式(71))は、ページ26に記載された一般的SOCPと同じ形の2次コーン・プログラム(“SOCP”)である。これは、式(68)のそれと同じ形で表現して、解くことができる。QP目的に対しては、式は下記の形を持つ。
【0236】
【数107】
ただし、i=1,…,mに対し、
【0238】
【数108】
を条件とする。
【0240】
動的MPC計算が安定し、コントローラがシステムを1タイムステップの中で定常状態に駆動できるようなプロセス動的力学である場合は、コントローラの中でサイクリングが起こる。図11は、コントローラの位相図である。目的は、コントローラがプロセスを大きな出力と小さな入力に駆動しようとするものである。公称モデルが正しければ、最適定常状態作動ポイントは、(u,y)=(1,1/2)になる。図11においては、参照符号98を持つ白い円は予測された入力と出力に相当する。参照符号100を持つ黒い円は、実際の入力および出力に相当する。各円の隣の符号は、その値が発生するタイムステップを示す。時間ゼロにおいてプラントが原点にあれば、第1タイムステップにおいて、モデルはプラントが(1,1/2)にあると予測する。しかしミスマッチのために、入力が投入されると、真のプラントは(1,2)にある。この時バイアスをモデルに含める。これは、公称モデルラインを持ち上げて、その交点が3/2になるようにすることに等しい。このタイムステップに対する最適解(モデルを用いる)は、(−1,1)にある。この場合にもモデルエラーのために、真のプラントは(−1,−2)にある。新しい入力は、プロセスを反対の方向に動かし、これが最終的にコントローラを循環させる。このサイクリングは図12に示され、この図では入力yおよび出力uは、時間の関数としてプロットされている。他方、真のゲインの値に関して何らかの情報が既知であれば、プロセスはより効果的に制御される。例えば、95パーセントの確率でゲインが2〜0.5の間にあったことが判明している場合には、ロバストLPを使用して、すべての出力が実現可能でとどまっている入力を見出すことができる。唯一の解は(u,y)=(1/2,1)である。
【0241】
ロバストLPに対する定常状態目標は、図13に示されている。この例は、幾分か異常であるが、定常状態目標計算における不確定性を扱うことの重要性を実証している。特に図11〜13により上に述べられた例は、公称ゲインが真のゲインに近付くにつれて、本発明の開示された実施形態に従い計算された定常状態目標値は、既知の不確定性の記述を条件に、システムに対する目的関数を極値化する値に近づく方法、および公称ゲインが真のゲインに等しい場合は、計算された目標が、既知の不確定性記述を条件に、目的関数を極値化する値に近づくことを説明している。
【0242】
不確定性がモデル予測制御における定常状態目標計算に関連する線形プログラムに含まれるときには、その結果は2次コーンプログラムである。モデル不確定性を明確に含むことにより、SOCPは、モデル化エラーによる定常状態コントローラにおけるサイクリングを効果的に除去することができる。特定の場合には、これは性能をほとんど犠牲にすることなく達成される。
【0243】
当業者には、本明細書に述べる各種の最適化“プロセス”、例えば図1のローカル最適化ブロック36、MPCブロック50およびDCS−PIDブロック52で表わされるプロセスがコントローラプロセスであり、このコントローラプロセスが、それぞれのプロセスの物理的実施形態を構成する1つまたは複数のコンピュータベースのシステム上で実施されることが理解されるであろう。例えば、本発明の一実施形態では、MPCプロセス50のような制御機能はDigital Equipment Corporation,Maynard,Massachusetts(現在のオーナーはCompaq Computer Corporation,Huston,Texas)において入手することのできるVAX、またはALPHAのような適切なコンピュータプラットフォームにおいて実行されるコンピュータプログラム(即ちコンピュータルーチンのコレクション)として実行することができる。代替方法としては、MPCプロセス50は、International Business Machines Corp.,Armonk,New Yorkのような多くのメーカにより市販されているような縮小命令セットコンピュータ(RISC),マルチプロセッサシステムにおいて有利に実行することができる。
【0244】
本発明で開示される実施形態によるMPC制御システムを具現化する1つまたは複数のコンピュータは各種のサブシステム(“被制御サブシステム”)とインターフェースを有し、プロセスプラント等の被制御システム中で制御を実行できる。
【0245】
前述のように、本発明は、コンピュータプロセッサをプログラミングすることにより一部実施することができる。プログラミングは、前記の動作を実行するプロセッサにより実行可能な命令プログラムを符号化するプロセッサで読取り可能なプログラム格納デバイスを用いることにより達成できる。プログラム格納デバイスは、例えばフロッピーディスク、CD−ROM、メモリデバイス(例えば、RAM、ROM、EPROM、EEPROM、等)、およびこの分野で良く知られているかまたはその後に開発されたその他の形態であってもよい。命令のプログラムは、“オブジェクトコード”、即ちコンピュータにより多少共直接に実行可能なバイナリ形式、実行前にコンパイルまたはインタープリタを必要とする“ソースコード”、または部分的にコンパイルされたコードのような特定の中間形式であってもよい。プログラム格納デバイスは、プロセッサにより直接読み取り可能か、またはプロセッサそれ自体により使用不能であるが、命令のプログラムの中間格納を可能にするものであってもよい。命令のプログラムは、プロセッサによりプログラム格納デバイスから直接読むことが可能である、代替方法としては、命令のプログラムは、プログラム格納デバイスに一時的または恒久的に格納し、そこからプロセッサに1つまたは複数のリンク、例えば電話線(モデム接続、またはISDNライン)、ケーブルモデムフックアップ、インターネット、無線または衛星送信等で伝送するか、場合によっては経路に沿って中間格納を提供する他のプログラム格納デバイスを用いて伝送することができる。プログラム格納デバイスおよび命令の符号化の正確な形態は、ここでは重要なものではない。
【0246】
本発明の特定の実施形態を本明細書で詳述してきたが、これは本発明の各種の構成を説明することを目的としたものに過ぎず、添付の請求項により限定される本発明の範囲に関する限定を意図するものではない。当業者には、請求項により限定された本発明の精神と範囲から逸脱することなく、開示した実施形態に対して各種の代替、変更/およびまたは修正ができることは、理解されるところである。
【図面の簡単な説明】
【図1】 “従来の”制御階層構造およびモデル予測制御階層構造の両者を用いるシステムの階層的制御構造を示すブロック図である。
【図2】 入/出力モデルに基づくMPCシステムのブロック図である。
【図3】 状態空間モデルに基づくMPCシステムのブロック図である。
【図4】 モデルパラメータ、θiおよびθjにおける不確定性が正規分布、またはガウス分布であると仮定されるシステムに対するθcに中心を持つ楕円形不確定性記述、または信頼性領域を図示するプロット図である。
【図5】 -gに中心に持つモデルパラメータ(ゲイン)gimおよびgilに対する楕円形信頼性領域の、矩形または"四角形"近似を示すプロット図である。
【図6】 楕円形信頼性領域およびそれの対応する四角形近似を示すプロット図である。
【図7】 2つの独立変数を持つ線形プログラミング問題の解に対する実現可能な領域を表わすものである。
【図8】 その実現可能な領域が図7に示されている線形プログラミング問題における制約に対する不確定性範囲を示すプロット図である。
【図9】 線形プログラミング問題におけるすべての制約に対する図8に示されたタイプの不確定性範囲を含むことにより減少した図7の実現可能領域を示し、また減少した実現可能領域の線形(四角形)近似を示すプロット図である。
【図10】 図9の減少した実現可能な領域内の可能な下降方向を示すプロット図である。
【図11】 ゲインミスマッチを持つ線形プログラミング問題に対する一連の実際および公称解を示すプロット図である。
【図12】 図11の線形プログラミング問題の公称解に対する時間に関する入力および出力特性を示すプロット図である。
【図13】 図11の線形プログラミング問題のロバスト解に対する時間に関する入力および出力特性を示すプロット図である。
Claims (11)
- 目的関数Jに従ってシステムを制御する方法であって、前記システムの動作が式△y=G△uにより記述されることが可能であり、ここで、yは1つまたは複数のシステム制御出力変数、uは1つまたは複数のシステム操作入力変数、Gはシステムゲインパラメータであり、
(a)式△y=~G△uにより前記システムをモデル化する工程であって、ここで、~GはGの公称推定であり、既知の不確定性記述を有する工程と、
(b)以下の非線形プログラムを解くことにより前記目的関数Jを極値化する工程であって、
cは目的関数Jにおける前記システム操作入力変数uに対する加重であり、
dは目的関数Jにおける前記システム制御出力変数yに対する加重であり、
ε=|ε1・・・εny|T≧0∈Rnyは、出力変数yの制約に対する違反を認める緩和変数であり、
Au∈R4nuXnuおよびAy∈R2nyXnyは、前記システム操作入力変数およびシステム制御出力変数の所望の数値範囲に相当するマトリックスであり、
bu∈R4nuおよびby∈R2nyは、前記システム操作入力変数およびシステム制御出力変数の所望の数値範囲に相当するベクトルであり、
Uが前記不確定性記述を示す、前記目的関数Jを極値化する工程とを備えたシステム制御方法。 - 目的関数Jに従ってシステムを制御する方法であって、前記システムの動作が式△y=G△uにより記述されることが可能であり、ここで、yは1つまたは複数のシステム制御出力変数、uは1つまたは複数のシステム操作入力変数、Gはシステムゲインパラメータであり、
(a)式△y=~G△uにより前記システムをモデル化する工程であって、ここで、~GはGの公称推定であり、既知の不確定性記述を有する工程と、
(b)以下の2次プログラムを解くことにより前記目的関数Jを極値化する工程であって、
cは目的関数Jにおける前記システム操作入力変数uに対する加重を示し、
dは目的関数Jにおける前記システム制御出力変数yに対する加重を示し、
ε=|ε1・・・εny|T≧0∈Rnyは、出力変数yの制約に対する違反を認める緩和関数であり、
Au∈R4nuxnuおよびAy∈R2nyxnyは、前記システム操作入力変数およびシステム制御出力変数の所望の数値範囲に相当するマトリックスであり、
bu∈R4nuおよびby∈R2nyは、前記システム操作入力変数およびシステム制御出力変数の所望の数値範囲に相当するベクトルであり、
Uが前記不確定性記述を示し、
Q0∈Rnuxnuは、システム操作入力変数の加重を認める正−限定対称(または場合によっては0)マトリックスであり、
Q1∈Rnyxnyは、緩和変数の加重を認める正−限定対称(または場合によっては0)マトリックスである、前記目的関数Jを極値化する工程とを備えたシステム制御方法。 - 目的関数Jに従ってシステムを制御する方法であって、前記システムの動作が式△y=G△uにより記述されることが可能であり、ここで、yは1つまたは複数のシステム制御出力変数、uは1つまたは複数のシステム操作入力変数、Gはシステムゲインパラメータを表わすマトリックスであり、
(a)式△y=~G△uにより前記システムをモデル化する工程であって、ここで、~GはGの公称推定であり、既知の不確定性記述を有する工程と、
(b)最小および最大範囲をGのエレメントに割当てる工程と、
(c)以下の線形プログラムを解くことにより前記目的関数Jを極値化する工程であって、
cは目的関数Jにおける前記システム操作入力変数uに対する加重を示し、
dは目的関数Jにおける前記システム制御出力変数yに対する加重を示し、
ε=|ε1・・・εny|T≧0∈Rnyは、出力変数yの制約に対する違反を認める緩和変数であり、
Au∈R4nuxnuおよびAy∈R2nyxnyは、前記システム操作入力変数およびシステム制御出力変数の所望の数値範囲に相当するマトリックスであり、
bu∈R4nuおよびby∈R2nyは、前記システム操作入力変数およびシステム制御出力変数の所望の数値範囲に相当するベクトルであり、
Uが前記不確定性記述を示し、
A*はAyGの最大および最小限界のあらゆる可能な組み合わせを含むマトリックスである、前記目的関数Jを極値化する工程とを備えたシステム制御方法。 - 目的関数Jに従ってシステムを制御する方法であって、前記システムの動作が式△y=G△uにより記述されることが可能であり、ここで、yは1つまたは複数のシステム制御出力変数、uは1つまたは複数のシステム操作入力変数、Gはシステムゲインパラメータであり、
(a)式△y=~G△uにより前記システムをモデル化する工程であって、ここで、~GはGの公称推定であり、既知の不確定性記述を有する工程と、
(b)以下の非線形プログラムを解くことにより前記目的関数Jを極値化する工程であって、
cは目的関数Jにおける前記システム操作入力変数uの加重を示し、
dは目的関数Jにおける前記システム制御出力変数yに対する加重を示し、
ε=|ε1・・・εny|T≧0∈Rnyは、出力変数yの制約に対する違反を認める緩和変数であり、
bは、予測出力変数yと現在の測定された出力<yとの比較に基づくモデルバイアスベクトルであり、
Au∈R4nuxnuおよびAy∈R2nyxnyは、前記システム操作入力変数およびシステム制御出力変数の所望の数値範囲に相当するマトリックスであり、
bu∈R4nuおよびby∈R2nyは、前記システム操作入力変数およびシステム制御出力変数の所望の数値範囲に相当するベクトルであり、
byiはbyのi番目のエレメントであり、
~gは~Gのベクトル形式であり、
αは、α=Φ-1(γ)により示され、ここで、Φ(x)はゼロ平均および以下のユニット分散Φ(x)を有する一変量正規分布関数であり、
DはDi=[diag(ai1e)diag(a12e)・・・diag(aime)]Tにより定義され、ここで、aiはAyのi番目の列である、前記目的関数Jを極値化する工程とを備えたシステム制御方法。 - 目的関数Jに従ってシステムを制御する装置であって、前記システムの動作が△y=G△uにより記述されることが可能であり、ここで、yは1つまたは複数のシステム制御出力変数、uは1つまたは複数のシステム操作入力変数、Gは既知の不確定性記述を有するシステムゲインパラメータであり、
(a)前記システムゲインパラメータGの公称推定~Gを導くエスティメータと、
(b)前記システム制御出力変数および前記システム操作入力変数の少なくとも一つの過去の値、ならびに前記公称推定~Gに応答し、以下の式を解くことにより前記目的関数を極値化する計算部であって、
cは目的関数Jにおける前記システム操作入力変数uに対する加重であり、
dは目的関数Jにおける前記システム制御出力変数yに対する加重であり、
ε=|ε1・・・εny|T≧0∈Rnyは、出力変数yの制約に対する違反を認める緩和変数であり、
Au∈R4nuxnuおよびAy∈R2nyxnyは、前記システム操作入力変数およびシステム制御出力変数の所望の数値範囲に相当するマトリックスであり、
bu∈R4nuおよびby∈R2nyは、前記システム操作入力変数およびシステム制御出力変数の所望の数値範囲に相当するベクトルであり、
Uが前記不確定性記述を示す、計算部とを備えたシステム制御装置。 - 目的関数Jに従ってシステムを制御する装置であって、前記システムの動作が△y=G△uにより記述されることが可能であり、ここで、yは1つまたは複数のシステム制御出力変数、uは1つまたは複数のシステム操作入力変数、Gは既知の不確定性記述を有するシステムゲインパラメータであり、
(a)前記システムゲインパラメータGの公称推定~Gを導くエスティメータと、
(b)前記システム制御出力変数および前記システム操作入力変数の少なくとも一つの過去の値、ならびに前記公称推定~Gに応答し、以下の式を解くことにより前記目的関数を極値化する計算部であって、
cは目的関数Jにおける前記システム操作入力変数に対する加重であり、
dは目的関数Jにおける前記システム制御出力変数yに対する加重であり、
ε=|ε1・・・εny|T≧0∈Rnyは、出力変数yの制約に対する違反を認める緩和変数であり、
bは、予測出力変数yと現在の測定された出力<yとの比較に基づくモデルバイアスベクトルであり、
Au∈R4nuxuおよびAy∈R2nyxnyは、前記システム操作入力変数およびシステム制御出力変数の所望の数値範囲に相当するマトリックスであり、
bu∈R4nuおよびby∈R2nyは、前記システム操作入力変数およびシステム制御出力変数の所望の数値範囲に相当するベクトルであり、
byiはbyのi番目のエレメントであり、
~gは~Gのベクトル形式であり、
αはα=Φ-1(γ)により示され、ここで、Φ(x)はゼロ平均および以下のユニット分散Φ(x)を有する一変量正規分布関数であり、
DはDi=[diag(ai1e)diag(a12e)・・・diag(aime)]Tにより定義され、ここで、aiはAyのi番目の列である、計算部とを備えたシステム制御装置。 - 目的関数Jに従ってシステムを制御する装置であって、前記システムの動作が△y=G△uにより記述されることが可能であり、ここで、yは1つまたは複数のシステム制御出力変数、uは1つまたは複数のシステム操作入力変数、Gは既知の不確定性記述を有するシステムゲインパラメータであり、
(a)前記システムゲインパラメータGの公称推定~Gを導くエスティメータ手段と、
(b)前記システム制御出力変数および前記のシステム操作入力変数の少なくとも一つの過去の値、ならびに前記公称推定~Gに応答し、以下の式を解くことにより前記目的関数を極値化する計算手段であって、
cは目的関数Jにおける前記システム操作入力変数uに対する加重であり、
dは目的関数Jにおける前記システム制御出力変数yに対する加重であり、
ε=|ε1・・・εny|T≧0∈Rnyは、出力変数yの制約に対する違反を認める緩和変数であり、
Au∈R4nuxuおよびAy∈R2nyxnyは、前記システム操作入力変数およびシステム制御出力変数の所望の数値範囲に相当するマトリックスであり、
bu∈R4nuおよびby∈R2nyは、前記システム操作入力変数およびシステム制御出力変数の所望の数値範囲に相当するベクトルであり、
Uが前記不確定性記述を示す、計算手段とを備えたシステム制御装置。 - 目的関数Jに従ってシステムを制御する装置であって、前記システムの動作が△y=G△uにより記述されることが可能であり、ここで、yは1つまたは複数のシステム制御出力変数、uは1つまたは複数のシステム操作入力変数、Gは既知の不確定性記述を有するシステムゲインパラメータであり、
(a)前記システムゲインパラメータGの公称推定~Gを導くエスティメータ手段と、
(b)前記システム制御出力変数および前記システム操作入力変数の少なくとも一つの過去の値、ならびに前記公称推定~Gに応答し、以下の式を解くことにより前記目的関数を極値化する計算手段であって、
cは目的関数Jにおける前記システム操作入力変数uに対する加重であり、
dは目的関数Jにおける前記システム制御出力変数yに対する加重であり、
ε=|ε1・・・εny|T≧0∈Rnyは、出力変数yの制約に対する違反を認める緩和変数であり、
bは予測出力変数yと現在の測定された出力<yとの比較に基づくモデルバイアスベクトルであり、
Au∈R4nuxuおよびAy∈R2nyxnyは、前記システム操作入力変数およびシステム制御出力変数の所望の数値範囲に相当するマトリックスであり、
bu∈R4nuおよびby∈R2nyは、前記システム操作入力変数およびシステム制御出力変数の所望の数値範囲に相当するベクトルであり、
byiはbyのi番目のエレメントであり、
~gは~Gのベクトル形式であり、
αは、α=Φ-1(γ)により示され、ここで、Φ(x)はゼロ平均および以下のユニット分散Φ(x)を有する一変量正規分布関数であり、
DはDi=[diag(ai1e)diag(a12e)・・・diag(aime)]Tにより定義され、ここで、aiはAyのi番目の列である、計算手段とを備えたシステム制御装置。 - 請求項5から8のいずれかの装置によって読取り可能なプログラム記憶媒体であり、内部に、請求項1から4のいずれかの方法を実行する命令を含む、符号化した命令プログラムを有する、プログラム記憶媒体。
- (a)プロセッサと、(b)プログラム記憶媒体とを備えたコントローラであって、
前記プログラム記憶媒体が前記プロセッサで読取り可能であり、請求項1から4からなる請求項一群から選ばれた請求項によるシステム制御方法を実行する命令プログラムを符号化するコントローラ。 - 命令プログラムの機械読取り可能なコピーを符号化するプログラム記憶媒体であって、前記命令プログラムが、コンピュータで実行可能であり、請求項1から4からなる請求項一群から選ばれた請求項によるシステム制御方法を実行する、プログラム記憶媒体。
Applications Claiming Priority (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US10232598P | 1998-09-28 | 1998-09-28 | |
| US09/266,709 | 1999-03-11 | ||
| US09/266,709 US6381505B1 (en) | 1998-09-28 | 1999-03-11 | Robust steady-state target calculation for model predictive control |
| US60/102,325 | 1999-03-11 | ||
| PCT/US1999/022368 WO2000018420A2 (en) | 1998-09-28 | 1999-09-28 | Robust steady-state target calculation for model predictive control |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2002525773A JP2002525773A (ja) | 2002-08-13 |
| JP4614536B2 true JP4614536B2 (ja) | 2011-01-19 |
Family
ID=26799274
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2000571938A Expired - Lifetime JP4614536B2 (ja) | 1998-09-28 | 1999-09-28 | モデル予測制御用ロバスト定常状態目標計算を用いたシステム制御方法、システム制御装置及びコントローラ並びにモデル予測制御用ロバスト定常状態目標計算を用いたシステム制御方法を実行するプログラム記憶媒体 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US6381505B1 (ja) |
| EP (1) | EP1115413A2 (ja) |
| JP (1) | JP4614536B2 (ja) |
| CA (1) | CA2345429C (ja) |
| WO (1) | WO2000018420A2 (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9971323B2 (en) | 2014-05-30 | 2018-05-15 | Azbil Corporation | Optimizing device and method |
| CN113110317A (zh) * | 2021-03-31 | 2021-07-13 | 沈阳工业大学 | 混杂模型工业过程约束鲁棒预测控制综合优化设计方法 |
| JP2023157086A (ja) * | 2022-04-14 | 2023-10-26 | 株式会社豊田中央研究所 | 制御装置、制御方法、及びコンピュータプログラム |
| CN118859687A (zh) * | 2024-09-26 | 2024-10-29 | 国网浙江省电力有限公司湖州供电公司 | 一种仿生运输机器人的智能稳定控制方法及系统 |
Families Citing this family (31)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6714899B2 (en) * | 1998-09-28 | 2004-03-30 | Aspen Technology, Inc. | Robust steady-state target calculation for model predictive control |
| US6459939B1 (en) * | 1999-06-29 | 2002-10-01 | Alan J. Hugo | Performance assessment of model predictive controllers |
| US6826521B1 (en) * | 2000-04-06 | 2004-11-30 | Abb Automation Inc. | System and methodology and adaptive, linear model predictive control based on rigorous, nonlinear process model |
| HRP20000500B1 (en) * | 2000-07-25 | 2009-07-31 | Jagnjić Željko | Expansion of input data set by expansion of difference vector on the right side with the application to qualitative modelling |
| US6952700B2 (en) * | 2001-03-22 | 2005-10-04 | International Business Machines Corporation | Feature weighting in κ-means clustering |
| DE10237335A1 (de) * | 2002-08-14 | 2004-01-08 | Siemens Ag | Verfahren und Anordnung zum Entwurf eines technischen Systems |
| US7376472B2 (en) * | 2002-09-11 | 2008-05-20 | Fisher-Rosemount Systems, Inc. | Integrated model predictive control and optimization within a process control system |
| CA2513091A1 (en) * | 2003-01-31 | 2004-08-19 | Fakhruddin T. Attarwala | Integrated optimization and control using modular model predictive controller |
| US7152023B2 (en) * | 2003-02-14 | 2006-12-19 | United Technologies Corporation | System and method of accelerated active set search for quadratic programming in real-time model predictive control |
| WO2005100417A1 (en) * | 2004-04-13 | 2005-10-27 | Union Carbide Chemicals & Plastics Technology Corporation | Use of instantaneous split to improve reactor control |
| FR2887044B1 (fr) * | 2005-06-10 | 2007-08-10 | Wuilfert Societe Par Actions S | Dispositif de reglage automatique des asservissements d'un simulateur mecanique de mouvements et dispositif associe |
| US7451004B2 (en) * | 2005-09-30 | 2008-11-11 | Fisher-Rosemount Systems, Inc. | On-line adaptive model predictive control in a process control system |
| US7463937B2 (en) | 2005-11-10 | 2008-12-09 | William Joseph Korchinski | Method and apparatus for improving the accuracy of linear program based models |
| SE529454C2 (sv) | 2005-12-30 | 2007-08-14 | Abb Ab | Förfarande och anordning för trimning och styrning |
| US20080071395A1 (en) * | 2006-08-18 | 2008-03-20 | Honeywell International Inc. | Model predictive control with stochastic output limit handling |
| US8248886B2 (en) | 2007-04-10 | 2012-08-21 | Exxonmobil Upstream Research Company | Separation and noise removal for multiple vibratory source seismic data |
| US20090076773A1 (en) * | 2007-09-14 | 2009-03-19 | Texas Tech University | Method for identifying unmeasured disturbances in process control test data |
| US8209045B2 (en) * | 2008-04-07 | 2012-06-26 | Honeywell International Inc. | System and method for discrete supply chain control and optimization using model predictive control |
| CN102007459B (zh) * | 2008-04-17 | 2015-01-07 | 埃克森美孚上游研究公司 | 用于储层开发计划的鲁棒性基于优化的决策支持工具 |
| CN102007485B (zh) * | 2008-04-18 | 2014-06-25 | 埃克森美孚上游研究公司 | 储层开发计划的基于markov决策过程的决策支持工具 |
| WO2009131761A2 (en) * | 2008-04-21 | 2009-10-29 | Exxonmobile Upstream Research Company | Stochastic programming-based decision support tool for reservoir development planning |
| US9141098B2 (en) * | 2009-10-30 | 2015-09-22 | Rockwell Automation Technologies, Inc. | Integrated optimization and control for production plants |
| US20120239169A1 (en) * | 2011-03-18 | 2012-09-20 | Rockwell Automation Technologies, Inc. | Transparent models for large scale optimization and control |
| JP2013114666A (ja) * | 2011-11-30 | 2013-06-10 | Ryosuke Kuriiwa | モデル予測制御のための差動計算機械 |
| CN103257572B (zh) * | 2012-11-29 | 2016-05-18 | 浙江大学 | 分馏系统中稳态优化的软约束控制方法 |
| US9407676B2 (en) | 2013-11-25 | 2016-08-02 | At&T Intellectual Property I, Lp | Method and apparatus for distributing media content |
| US9645575B2 (en) | 2013-11-27 | 2017-05-09 | Adept Ai Systems Inc. | Method and apparatus for artificially intelligent model-based control of dynamic processes using probabilistic agents |
| US10307863B2 (en) * | 2013-12-06 | 2019-06-04 | Mitsubishi Electric Research Laboratories, Inc. | Control of redundant laser processing machines |
| CN110737969B (zh) * | 2019-09-09 | 2021-07-27 | 华中科技大学 | 一种基于极大代数的离散制造系统节能方法 |
| CN111555367B (zh) * | 2020-05-13 | 2021-10-01 | 广东电网有限责任公司 | 一种智能电网混合优化模型的加速分布式优化方法 |
| EP3929679A1 (en) * | 2020-06-23 | 2021-12-29 | ABB Schweiz AG | Engineering system for orchestration of an industrial plant |
Family Cites Families (21)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS57156087A (en) * | 1981-03-24 | 1982-09-27 | Toshiba Corp | Operating system for sewage treatment system by activated sludge method |
| US4478783A (en) * | 1981-12-07 | 1984-10-23 | The Babcock & Wilcox Company | Nuclear power plant feedwater controller design |
| US5351184A (en) | 1993-01-26 | 1994-09-27 | Honeywell Inc. | Method of multivariable predictive control utilizing range control |
| US5408405A (en) * | 1993-09-20 | 1995-04-18 | Texas Instruments Incorporated | Multi-variable statistical process controller for discrete manufacturing |
| JPH07200833A (ja) | 1993-12-08 | 1995-08-04 | Nec Corp | 画像化システムにおいて移動物体の数を決定し画像の点と移動物体とを関連させる方法 |
| US5424962A (en) | 1993-12-29 | 1995-06-13 | Comsat | Method and system for projecting steady state conditions of a product from transient monotonic or cyclic data |
| US5586221A (en) * | 1994-07-01 | 1996-12-17 | Syracuse University | Predictive control of rolling mills using neural network gauge estimation |
| US5481453A (en) | 1994-08-25 | 1996-01-02 | Corporation De L'ecole Polytechnique | Dual loop PID configuration |
| JPH0883104A (ja) * | 1994-09-12 | 1996-03-26 | Toshiba Corp | プラント制御装置 |
| US5568378A (en) | 1994-10-24 | 1996-10-22 | Fisher-Rosemount Systems, Inc. | Variable horizon predictor for controlling dead time dominant processes, multivariable interactive processes, and processes with time variant dynamics |
| US5566065A (en) | 1994-11-01 | 1996-10-15 | The Foxboro Company | Method and apparatus for controlling multivariable nonlinear processes |
| CA2216449C (en) * | 1995-04-03 | 2006-03-14 | Honeywell Inc. | A method of optimal controller design for multivariable predictive control utilizing range control |
| US5574638A (en) | 1995-04-03 | 1996-11-12 | Lu; Zhuxin J. | Method of optimal scaling of variables in a multivariable predictive controller utilizing range control |
| US5572420A (en) | 1995-04-03 | 1996-11-05 | Honeywell Inc. | Method of optimal controller design for multivariable predictive control utilizing range control |
| US5561599A (en) | 1995-06-14 | 1996-10-01 | Honeywell Inc. | Method of incorporating independent feedforward control in a multivariable predictive controller |
| US5758047A (en) | 1995-06-14 | 1998-05-26 | Lu; Zhuxin Joseph | Method of process controller optimization in a multivariable predictive controller |
| US6047221A (en) * | 1997-10-03 | 2000-04-04 | Pavilion Technologies, Inc. | Method for steady-state identification based upon identified dynamics |
| US6162488A (en) * | 1996-05-14 | 2000-12-19 | Boston University | Method for closed loop control of chemical vapor deposition process |
| US6026334A (en) * | 1996-07-30 | 2000-02-15 | Weyerhaeuser Company | Control system for cross-directional profile sheet formation |
| US5978752A (en) * | 1997-08-07 | 1999-11-02 | Seagate Technology, Inc. | Model validation algorithm for characterizing parameters and uncertainty in a disc drive |
| US6064809A (en) * | 1998-06-05 | 2000-05-16 | The Board Of Trustees Of The University Of Illinois | Fast model predictive ellipsoid control process |
-
1999
- 1999-03-11 US US09/266,709 patent/US6381505B1/en not_active Expired - Lifetime
- 1999-09-28 WO PCT/US1999/022368 patent/WO2000018420A2/en not_active Ceased
- 1999-09-28 EP EP99952962A patent/EP1115413A2/en not_active Withdrawn
- 1999-09-28 CA CA002345429A patent/CA2345429C/en not_active Expired - Fee Related
- 1999-09-28 JP JP2000571938A patent/JP4614536B2/ja not_active Expired - Lifetime
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9971323B2 (en) | 2014-05-30 | 2018-05-15 | Azbil Corporation | Optimizing device and method |
| CN113110317A (zh) * | 2021-03-31 | 2021-07-13 | 沈阳工业大学 | 混杂模型工业过程约束鲁棒预测控制综合优化设计方法 |
| CN113110317B (zh) * | 2021-03-31 | 2024-04-26 | 沈阳工业大学 | 混杂模型工业过程约束鲁棒预测控制综合优化设计方法 |
| JP2023157086A (ja) * | 2022-04-14 | 2023-10-26 | 株式会社豊田中央研究所 | 制御装置、制御方法、及びコンピュータプログラム |
| JP7804518B2 (ja) | 2022-04-14 | 2026-01-22 | 株式会社豊田中央研究所 | 制御装置、制御方法、及びコンピュータプログラム |
| CN118859687A (zh) * | 2024-09-26 | 2024-10-29 | 国网浙江省电力有限公司湖州供电公司 | 一种仿生运输机器人的智能稳定控制方法及系统 |
Also Published As
| Publication number | Publication date |
|---|---|
| US6381505B1 (en) | 2002-04-30 |
| CA2345429A1 (en) | 2000-04-06 |
| CA2345429C (en) | 2008-07-29 |
| WO2000018420A2 (en) | 2000-04-06 |
| WO2000018420A3 (en) | 2000-08-24 |
| JP2002525773A (ja) | 2002-08-13 |
| EP1115413A2 (en) | 2001-07-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4614536B2 (ja) | モデル予測制御用ロバスト定常状態目標計算を用いたシステム制御方法、システム制御装置及びコントローラ並びにモデル予測制御用ロバスト定常状態目標計算を用いたシステム制御方法を実行するプログラム記憶媒体 | |
| US6714899B2 (en) | Robust steady-state target calculation for model predictive control | |
| EP0722579B1 (en) | A neural net based disturbance predictor for model predictive control | |
| CN101807048B (zh) | 过程控制系统中的在线自适应模型预测控制 | |
| US8046089B2 (en) | Apparatus and method for model predictive control (MPC) of a nonlinear process | |
| US7050863B2 (en) | Integrated model predictive control and optimization within a process control system | |
| US7337022B2 (en) | Constraint and limit feasibility handling in a process control system optimizer | |
| EP1399784B1 (en) | Improved process control | |
| Bououden et al. | A new approach for fuzzy predictive adaptive controller design using particle swarm optimization algorithm | |
| US4481567A (en) | Adaptive process control using function blocks | |
| US20080071395A1 (en) | Model predictive control with stochastic output limit handling | |
| Baranski et al. | Comparative study of neighbor communication approaches for distributed model predictive control in building energy systems | |
| Tilahun | Fuzzy-based predictive deep reinforcement learning for robust and constrained optimal control of industrial solar thermal plants | |
| Ricardez-Sandoval et al. | Application of robust control tools to the simultaneous design and control of dynamic systems | |
| Thampi et al. | Intelligent model for automating PID controller tuning for industrial water level control system | |
| AL-Qutami et al. | Design of a Fuzzy Logic process Controller for flow applications and implementation in series tanks Pilot Plant | |
| Warren et al. | Improved output constraint-handling for MPC with disturbance uncertainty | |
| Ahmad | Data-driven controller of nuclear steam generators by set membership approximation | |
| CN121237247A (zh) | 基于工业互联网的废气处理设备控制系统 | |
| Mankad et al. | Modifier-adaptation-based RTO scheme for water distribution networks under demand and parametric uncertainties | |
| Nasir et al. | Performance Evaluation of Model Predictive Control for Three Interacting Tank Process Based on its Lower Order Integer and Non-Integer Models | |
| Cheng | Robust model-based steady-state feedback optimization for chemical plants | |
| Geetha et al. | Real-time implementation and performance analysis of state estimation based model predictive controller for CSTR plant | |
| Dughman | Improving Tracking in Optimal Model Predictive Control | |
| Jetto et al. | Constrained Transient Optimization Using B-Splines Functions as Control Inputs |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20060926 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20090106 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20090401 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20090408 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20090420 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20090915 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20091214 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20100406 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100726 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20100727 |
|
| A911 | Transfer to examiner for re-examination before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20100817 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20100928 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20101019 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4614536 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20131029 Year of fee payment: 3 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| EXPY | Cancellation because of completion of term |