JP4614879B2 - 密閉型のウォームギヤ式指関節ユニット - Google Patents
密閉型のウォームギヤ式指関節ユニット Download PDFInfo
- Publication number
- JP4614879B2 JP4614879B2 JP2005379772A JP2005379772A JP4614879B2 JP 4614879 B2 JP4614879 B2 JP 4614879B2 JP 2005379772 A JP2005379772 A JP 2005379772A JP 2005379772 A JP2005379772 A JP 2005379772A JP 4614879 B2 JP4614879 B2 JP 4614879B2
- Authority
- JP
- Japan
- Prior art keywords
- worm
- shaft
- case
- sealed
- opening
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Lifetime
Links
Images



Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H1/00—Toothed gearings for conveying rotary motion
- F16H1/02—Toothed gearings for conveying rotary motion without gears having orbital motion
- F16H1/04—Toothed gearings for conveying rotary motion without gears having orbital motion involving only two intermeshing members
- F16H1/12—Toothed gearings for conveying rotary motion without gears having orbital motion involving only two intermeshing members with non-parallel axes
- F16H1/16—Toothed gearings for conveying rotary motion without gears having orbital motion involving only two intermeshing members with non-parallel axes comprising worm and worm-wheel
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J15/00—Gripping heads and other end effectors
- B25J15/0009—Gripping heads and other end effectors comprising multi-articulated fingers, e.g. resembling a human hand
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J17/00—Joints
- B25J17/02—Wrist joints
- B25J17/0241—One-dimensional joints
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J19/00—Accessories fitted to manipulators, e.g. for monitoring, for viewing; Safety devices combined with or specially adapted for use in connection with manipulators
- B25J19/0075—Means for protecting the manipulator from its environment or vice versa
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Program-controlled manipulators
- B25J9/10—Program-controlled manipulators characterised by positioning means for manipulator elements
- B25J9/102—Gears specially adapted therefor, e.g. reduction gears
- B25J9/103—Gears specially adapted therefor, e.g. reduction gears with backlash-preventing means
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H57/00—General details of gearing
- F16H57/02—Gearboxes; Mounting gearing therein
- F16H57/031—Gearboxes; Mounting gearing therein characterised by covers or lids for gearboxes
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H57/00—General details of gearing
- F16H57/02—Gearboxes; Mounting gearing therein
- F16H57/039—Gearboxes for accommodating worm gears
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H57/00—General details of gearing
- F16H57/02—Gearboxes; Mounting gearing therein
- F16H2057/02008—Gearboxes; Mounting gearing therein characterised by specific dividing lines or planes of the gear case
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H57/00—General details of gearing
- F16H57/02—Gearboxes; Mounting gearing therein
- F16H57/023—Mounting or installation of gears or shafts in the gearboxes, e.g. methods or means for assembly
- F16H2057/0235—Mounting or installation of gears or shafts in the gearboxes, e.g. methods or means for assembly specially adapted to allow easy accessibility and repair
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H57/00—General details of gearing
- F16H57/02—Gearboxes; Mounting gearing therein
- F16H57/029—Gearboxes; Mounting gearing therein characterised by means for sealing the gearboxes, e.g. to improve airtightness
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10T—TECHNICAL SUBJECTS COVERED BY FORMER US CLASSIFICATION
- Y10T74/00—Machine element or mechanism
- Y10T74/19—Gearing
- Y10T74/19642—Directly cooperating gears
- Y10T74/19698—Spiral
- Y10T74/19828—Worm
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- General Engineering & Computer Science (AREA)
- Robotics (AREA)
- Gear Transmission (AREA)
- Manipulator (AREA)
- General Details Of Gearings (AREA)
Description
ウォームと、
このウォームのウォーム軸を回転駆動する回転アクチュエータと、
前記ウォームに噛み合っているウォームホィールと、
前記ウォームホィールから同軸状態で突出している関節軸と、
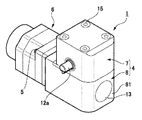
前記ウォーム、前記ウォーム軸、前記ウォームホィールおよび前記関節軸が収納されているギヤボックスケースとを有し、
前記関節軸の少なくとも一方の軸端部は前記ギヤボックスケースから外側に突出しており、
前記ウォーム軸の軸端部には、当該ウォーム軸を回すための工具を係合させるための工具係合部が形成されており、
前記ギヤボックスケースには前記工具係合部に外側からアクセス可能な開口部が形成されており、
この開口部は、取り外し可能な蓋部材によって封鎖されており、
前記ウォーム軸は、前記回転アクチュエータの回転軸を延長させて前記ウォームの軸穴を貫通して延びているウォーム軸部分であり、
当該回転軸の軸端部に前記工具係合部が形成されており、
前記工具係合部は、前記軸端部の端面に形成した所定深さの溝または多角形凹部であり、
前記ギヤボックスケースにおける前記開口部とは反対側の部位に、前記回転アクチュエータの先端部を装着することによって封鎖されている装着用開口部が形成されており、
前記回転軸の先端側の軸端部は、前記開口部の内周面部分に装着した軸受けによって回転自在の状態で支持されていることを特徴としている。
Claims (4)
- ウォームと、
このウォームのウォーム軸を回転駆動する回転アクチュエータと、
前記ウォームに噛み合っているウォームホィールと、
前記ウォームホィールから同軸状態で突出している関節軸と、
前記ウォーム、前記ウォーム軸、前記ウォームホィールおよび前記関節軸が収納されているギヤボックスケースとを有し、
前記関節軸の少なくとも一方の軸端部は前記ギヤボックスケースから外側に突出しており、
前記ウォーム軸の軸端部には、当該ウォーム軸を回すための工具を係合させるための工具係合部が形成されており、
前記ギヤボックスケースには前記工具係合部に外側からアクセス可能な開口部が形成されており、
この開口部は、取り外し可能な蓋部材によって封鎖されており、
前記ウォーム軸は、前記回転アクチュエータの回転軸を延長させて前記ウォームの軸穴を貫通して延びているウォーム軸部分であり、
当該回転軸の軸端部に前記工具係合部が形成されており、
前記工具係合部は、前記軸端部の端面に形成した所定深さの溝または多角形凹部であり、
前記ギヤボックスケースにおける前記開口部とは反対側の部位に、前記回転アクチュエータの先端部を装着することによって封鎖されている装着用開口部が形成されており、
前記回転軸の先端側の軸端部は、前記開口部の内周面部分に装着した軸受けによって回転自在の状態で支持されていることを特徴とする密閉型のウォームギヤ式指関節ユニット。 - 請求項1に記載の密閉型のウォームギヤ式指関節ユニットにおいて、
前記ウォームおよび前記ウォーム軸部分が取り付けられている第1ケース部分と、前記ウォームホィールおよび前記関節軸が取り付けられている第2ケース部分とを備えており、
前記第1ケース部分における前記ウォームの外周面が露出している露出面と、前記第2ケース部分における前記ウォームホィールの外周面が露出している露出面とを、シム板を挟み、相互に接合することにより、前記ギヤボックスケースが組み立てられており、
前記ウォーム軸部分と前記関節軸の軸間距離が前記シム板によって調整されていることを特徴とする密閉型のウォームギヤ式指関節ユニット。 - 請求項2に記載の密閉型のウォームギヤ式指関節ユニットにおいて、
前記第1ケース部分および前記第2ケース部分の前記露出面には、相補的な形状をしている位置決め部が形成されていることを特徴とする密閉型のウォームギヤ式指関節ユニット。 - 請求項2または3に記載のウォームギヤ式指関節ユニットにおいて、
前記第1ケース部分における前記開口部とは反対側の部位に、前記回転アクチュエータの先端部を装着することによって封鎖されている装着用開口部が形成されており、
前記回転軸の先端側の軸端部は、前記開口部の内周面部分に装着した軸受けによって回転自在の状態で支持されており、
前記第1ケース部分における前記ウォーム軸部分に直交する方向の一方の側が前記露出面となっていることを特徴とする密閉型のウォームギヤ式指関節ユニット。
Priority Applications (7)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005379772A JP4614879B2 (ja) | 2005-12-28 | 2005-12-28 | 密閉型のウォームギヤ式指関節ユニット |
| US12/089,693 US7823475B2 (en) | 2005-12-28 | 2006-11-30 | Sealed worm gear type finger joint unit |
| EP06833697A EP1977866B1 (en) | 2005-12-28 | 2006-11-30 | Sealed worm gear type finger joint unit |
| PCT/JP2006/323894 WO2007077698A1 (ja) | 2005-12-28 | 2006-11-30 | 密閉型のウォームギヤ式指関節ユニット |
| CA2626046A CA2626046C (en) | 2005-12-28 | 2006-11-30 | Sealed worm gear type finger joint unit |
| CNA2006800421451A CN101304848A (zh) | 2005-12-28 | 2006-11-30 | 密闭型蜗轮蜗杆式指关节单元 |
| DE602006013718T DE602006013718D1 (de) | 2005-12-28 | 2006-11-30 | Abgedichtetes fingergelenk mit schneckenrad |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005379772A JP4614879B2 (ja) | 2005-12-28 | 2005-12-28 | 密閉型のウォームギヤ式指関節ユニット |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2007175845A JP2007175845A (ja) | 2007-07-12 |
| JP4614879B2 true JP4614879B2 (ja) | 2011-01-19 |
Family
ID=38228056
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2005379772A Expired - Lifetime JP4614879B2 (ja) | 2005-12-28 | 2005-12-28 | 密閉型のウォームギヤ式指関節ユニット |
Country Status (7)
| Country | Link |
|---|---|
| US (1) | US7823475B2 (ja) |
| EP (1) | EP1977866B1 (ja) |
| JP (1) | JP4614879B2 (ja) |
| CN (1) | CN101304848A (ja) |
| CA (1) | CA2626046C (ja) |
| DE (1) | DE602006013718D1 (ja) |
| WO (1) | WO2007077698A1 (ja) |
Families Citing this family (36)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102008056520B4 (de) * | 2008-11-08 | 2017-10-19 | Stefan Schulz | Fingerelement |
| KR101136823B1 (ko) * | 2010-07-12 | 2012-04-19 | (주)케이엠앤아이 | 차량용 전동트랙의 기어박스 및 그 조립방법 |
| CN102152319B (zh) * | 2011-05-11 | 2012-07-11 | 哈尔滨工程大学 | 弹性驱动转动关节 |
| CN102229145A (zh) * | 2011-06-23 | 2011-11-02 | 哈尔滨工程大学 | 水下电动机械手二级摆动关节结构 |
| GB201114264D0 (en) | 2011-08-18 | 2011-10-05 | Touch Emas Ltd | Improvements in or relating to prosthetics and orthotics |
| JP6118132B2 (ja) * | 2012-09-11 | 2017-04-19 | 株式会社ミツバ | リニアアクチュエータ |
| GB201302025D0 (en) | 2013-02-05 | 2013-03-20 | Touch Emas Ltd | Improvements in or relating to prosthetics |
| JP5788428B2 (ja) * | 2013-03-26 | 2015-09-30 | Thk株式会社 | リニアアクチュエータ |
| US10034780B2 (en) | 2014-02-04 | 2018-07-31 | Rehabilitation Institute Of Chicago | Modular and lightweight myoelectric prosthesis components and related methods |
| GB201403265D0 (en) | 2014-02-25 | 2014-04-09 | Touch Emas Ltd | Prosthetic digit for use with touchscreen devices |
| GB201408253D0 (en) | 2014-05-09 | 2014-06-25 | Touch Emas Ltd | Systems and methods for controlling a prosthetic hand |
| TWI572834B (zh) * | 2014-09-10 | 2017-03-01 | 第一傳動科技股份有限公司 | 太陽能追日設備的轉向裝置 |
| GB201417541D0 (en) | 2014-10-03 | 2014-11-19 | Touch Bionics Ltd | Wrist device for a prosthetic limb |
| CN105576890A (zh) * | 2014-10-20 | 2016-05-11 | 杭州鄂达精密机电科技有限公司 | 适用于扫地机的边扫电机 |
| CN104802183A (zh) * | 2015-04-02 | 2015-07-29 | 西北工业大学 | 一种自锁式机器人关节 |
| JP6055514B2 (ja) * | 2015-06-01 | 2016-12-27 | Thk株式会社 | リニアアクチュエータ |
| GB2541369B (en) | 2015-07-22 | 2021-03-31 | Cmr Surgical Ltd | Drive mechanisms for robot arms |
| DK3359095T3 (da) | 2015-10-05 | 2022-02-07 | 5Th Element Ltd | Automatiseret hånd |
| US11185426B2 (en) | 2016-09-02 | 2021-11-30 | Touch Bionics Limited | Systems and methods for prosthetic wrist rotation |
| US10369024B2 (en) | 2016-09-02 | 2019-08-06 | Touch Bionics Limited | Systems and methods for prosthetic wrist rotation |
| DE112017005336T5 (de) | 2016-10-20 | 2019-07-11 | Mitsubishi Electric Corporation | Drei-Rotations-Freiheitsgrad-Verbindungsmechanismus, Roboter, Roboterarm und Roboterhand |
| DE102017206551A1 (de) * | 2017-04-19 | 2017-06-29 | Thyssenkrupp Ag | Verstellantrieb für eine Lenksäule, Antriebseinheit für einen Verstellantrieb, motorisch verstellbare Lenksäule für ein Kraftfahrzeug und Verfahren zur Herstellung eines Verstellantriebs für eine Lenksäule |
| KR101920042B1 (ko) | 2017-12-01 | 2018-11-20 | 계양전기 주식회사 | 인서트부시를 갖는 엑츄에이터장치 |
| US10973660B2 (en) | 2017-12-15 | 2021-04-13 | Touch Bionics Limited | Powered prosthetic thumb |
| CN107803849A (zh) * | 2017-12-30 | 2018-03-16 | 赵孝勇 | 一种仿生机器人手指 |
| US12103160B2 (en) | 2018-04-25 | 2024-10-01 | Mitsubishi Electric Corporation | Rotation connecting mechanism, robot, robot arm, and robot hand |
| US10801594B2 (en) * | 2018-05-30 | 2020-10-13 | The Boeing Company | Screw actuator, aircraft comprising a screw actuator, and method of lifting a load |
| CN109120095B (zh) * | 2018-08-08 | 2020-10-30 | 东莞市特姆优传动科技有限公司 | 一种便于拆卸组装的模块化电动推杆 |
| USD852248S1 (en) * | 2018-12-19 | 2019-06-25 | Timotion Technology Co., Ltd. | Linear actuator |
| JP7239328B2 (ja) * | 2019-01-16 | 2023-03-14 | ミネベアミツミ株式会社 | ウォーム、および回転機器 |
| EP3952794B1 (en) | 2019-04-10 | 2024-05-22 | Touch Bionics Limited | Prosthetic digit with articulating links |
| WO2021053557A1 (en) | 2019-09-18 | 2021-03-25 | Touch Bionics Limited | Prosthetic digits and actuators |
| US11931270B2 (en) | 2019-11-15 | 2024-03-19 | Touch Bionics Limited | Prosthetic digit actuator |
| JP7424816B2 (ja) * | 2019-12-13 | 2024-01-30 | ファナック株式会社 | ロボットの関節構造 |
| JP7617794B2 (ja) * | 2021-03-30 | 2025-01-20 | ニデックインスツルメンツ株式会社 | ギアードモータ |
| CN113172596B (zh) * | 2021-04-28 | 2022-07-01 | 中电建成都铁塔有限公司 | 一种位置和高度可调节的悬臂式焊接机器人 |
Family Cites Families (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS54125974U (ja) * | 1978-02-23 | 1979-09-03 | ||
| US4547121A (en) * | 1983-09-30 | 1985-10-15 | The United States Of America As Represented By The Administrator Of The National Aeronautics And Space Administration | Self-locking telescoping manipulator arm |
| US4813303A (en) * | 1984-08-31 | 1989-03-21 | Mandreles, Inc. | Power drive speed reducer |
| US5056213A (en) * | 1985-10-11 | 1991-10-15 | Reliance Electric Industrial Company | Method of assembling a gearmotor and housing |
| JPH0268656U (ja) * | 1988-11-14 | 1990-05-24 | ||
| ATA155691A (de) * | 1991-08-05 | 1993-04-15 | Igm Robotersysteme Aktiengesel | Getriebe zum antrieb eines gelenkes, insbesondere eines industrieroboters |
| JP2588381Y2 (ja) * | 1992-01-29 | 1999-01-06 | オリエンタルモーター株式会社 | 電動機用直交軸減速機 |
| JP2000039057A (ja) * | 1998-07-23 | 2000-02-08 | Oki Electric Ind Co Ltd | 減速装置 |
| US6032550A (en) * | 1998-09-08 | 2000-03-07 | Owens-Brockway Glass Container Inc. | Right angle drive gearbox |
| JP3643950B2 (ja) * | 2000-05-10 | 2005-04-27 | 光洋精工株式会社 | 電動式舵取装置 |
| FR2808759B1 (fr) * | 2000-05-10 | 2005-08-26 | Koyo Seiko Co | Appareil de direction assistee electrique |
| JP4121262B2 (ja) * | 2001-10-02 | 2008-07-23 | カヤバ工業株式会社 | 動力伝達装置の製造方法および電動パワーステアリング装置の製造方法 |
| AU2003278994A1 (en) * | 2002-09-26 | 2004-04-19 | Barrett Technology, Inc. | Intelligent, self-contained robotic hand |
| JP2004224280A (ja) * | 2003-01-24 | 2004-08-12 | Koyo Seiko Co Ltd | 電動式パワーステアリング装置 |
| JP3808453B2 (ja) * | 2003-06-26 | 2006-08-09 | 独立行政法人 宇宙航空研究開発機構 | モジュール化方式の多関節ロボットとその制御方法 |
| JP2005344853A (ja) * | 2004-06-03 | 2005-12-15 | New Sanwa:Kk | 無給油ウォーム減速機 |
| JP4614878B2 (ja) * | 2005-12-28 | 2011-01-19 | 株式会社ハーモニック・ドライブ・システムズ | ロボットハンドの指ユニットおよび組立方法 |
-
2005
- 2005-12-28 JP JP2005379772A patent/JP4614879B2/ja not_active Expired - Lifetime
-
2006
- 2006-11-30 DE DE602006013718T patent/DE602006013718D1/de active Active
- 2006-11-30 EP EP06833697A patent/EP1977866B1/en active Active
- 2006-11-30 CA CA2626046A patent/CA2626046C/en active Active
- 2006-11-30 US US12/089,693 patent/US7823475B2/en active Active
- 2006-11-30 CN CNA2006800421451A patent/CN101304848A/zh active Pending
- 2006-11-30 WO PCT/JP2006/323894 patent/WO2007077698A1/ja not_active Ceased
Also Published As
| Publication number | Publication date |
|---|---|
| EP1977866B1 (en) | 2010-04-14 |
| CA2626046A1 (en) | 2007-07-12 |
| CN101304848A (zh) | 2008-11-12 |
| EP1977866A4 (en) | 2009-01-28 |
| US20090145254A1 (en) | 2009-06-11 |
| EP1977866A1 (en) | 2008-10-08 |
| CA2626046C (en) | 2011-03-08 |
| US7823475B2 (en) | 2010-11-02 |
| DE602006013718D1 (de) | 2010-05-27 |
| WO2007077698A1 (ja) | 2007-07-12 |
| JP2007175845A (ja) | 2007-07-12 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4614879B2 (ja) | 密閉型のウォームギヤ式指関節ユニット | |
| JP5708981B2 (ja) | 電動パワーステアリング装置 | |
| JP5267372B2 (ja) | パワーシートの減速装置 | |
| CN101232980A (zh) | 机械手的手指单元及装配方法 | |
| KR101015004B1 (ko) | 유성 기어 구동 장치 | |
| CN112976050B (zh) | 机器人的关节结构 | |
| JP2008247148A (ja) | 車両用パワーシート装置の駆動装置 | |
| EP1775163B1 (en) | Mirror device for a vehicle | |
| JP6693829B2 (ja) | 動力伝達装置 | |
| JP2012117648A (ja) | 減速機、これを備える電動パワーステアリング装置、ならびに減速機の製造方法 | |
| JP2007186021A (ja) | 電動パワーステアリング装置 | |
| JPWO2004036089A1 (ja) | 車両用差動装置 | |
| JP4219618B2 (ja) | 小型ウォーム併用ギヤードモータ | |
| JP7034810B2 (ja) | 減速機構及び減速機付モータ | |
| JP2002274397A (ja) | 電動パワーステアリング装置 | |
| JP3129957B2 (ja) | アクチュエータの出力軸 | |
| CN224046556U (zh) | 一种平粮机器人的驱动结构及平粮机器人 | |
| KR200396430Y1 (ko) | 라쳇 렌치 | |
| CN113183179A (zh) | 一种关节结构及其工业机器人 | |
| JP2010116089A (ja) | 歯車装置及び電動パワーステアリング装置 | |
| CN1398209A (zh) | 手持式工具机 | |
| JP2001037138A (ja) | モータの取付構造及びパワーウィンドレギュレータ | |
| JP2007152525A (ja) | グラインダ | |
| JP2002225734A (ja) | 電動パワーステアリング装置 | |
| JPH0437806Y2 (ja) |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20070918 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20100727 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100924 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20101014 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20101019 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4614879 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20131029 Year of fee payment: 3 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| EXPY | Cancellation because of completion of term |