JP4662007B2 - 障害物情報呈示装置 - Google Patents
障害物情報呈示装置 Download PDFInfo
- Publication number
- JP4662007B2 JP4662007B2 JP2001220165A JP2001220165A JP4662007B2 JP 4662007 B2 JP4662007 B2 JP 4662007B2 JP 2001220165 A JP2001220165 A JP 2001220165A JP 2001220165 A JP2001220165 A JP 2001220165A JP 4662007 B2 JP4662007 B2 JP 4662007B2
- Authority
- JP
- Japan
- Prior art keywords
- obstacle
- distance
- presentation
- information
- timing corresponding
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images








Landscapes
- Traffic Control Systems (AREA)
- Position Fixing By Use Of Radio Waves (AREA)
- Radar Systems Or Details Thereof (AREA)
Description
【発明の属する技術分野】
本発明は、路上に設置された情報提供システム(以下、道路インフラという)から提供される道路形状や障害物に関する情報に基づいて、前方に障害物が存在する場合に警報を発する障害物情報呈示装置に関するものである。
【0002】
【関連する背景技術】
近年、運転者の負担軽減や安全性の向上等を目的として、前方の道路上に存在する障害物等を運転者に呈示して、ブレーキ操作や操舵等の回避操作を促す障害物情報呈示装置が提案されている。この種の呈示装置では、車載のセンサの検出情報に加えて、道路インフラから、例えば車載センサでは検出不能なブラインドコーナー奥の障害物情報等を受信し、これらの情報に基づいて呈示処理を行っている。
【0003】
呈示処理はディスプレイやスピーカを利用して行われ、前方に障害物を検出したときには、現在の車速から所定の減速度で車両を制動したときに障害物の手前で停止可能なタイミング(以下、減速距離相当の呈示タイミングという)で呈示処理を実行している。これは、運転者が前方の障害物を目視で確認すると、通常は直ちにブレーキ操作を行うことに着目し、呈示処理を実行したときのブレーキ操作のタイミングで無理なく停止可能なように配慮された結果である。
【0004】
【発明が解決しようとする課題】
ところで、上記した減速距離相当の呈示タイミングの時点で、自車がブラインドコーナーにより障害物を目視できない地点にいる場合には、図10に示すように、運転者は呈示に呼応してポイントbでアクセル操作を中止し、その後に障害物を目視したポイントcの時点でブレーキ操作を行う傾向がある。この場合でも、運転者は事前に障害物の存在を認識しているため、障害物を目視すると直ちにブレーキ操作を開始する。
【0005】
ところが、運転者は、例えば対向車とのすれ違い等の些細なきっかけにより呈示から注意を逸らされて障害物の存在を忘れることがあり、このときには目視した対象が障害物であることを認識した後でなければ、ブレーキ操作を開始しない。よって、図に破線で示すように、認識に要する時間tが経過するポイントdまでブレーキ操作が遅れて、余裕をもって車両を減速できないという問題があった。
【0006】
本発明の目的は、ブラインドコーナーにおいて呈示処理にも拘わらず運転者が障害物の存在を忘れた場合であっても、運転者に障害物の存在を認知させて、障害物を目視した時点で直ちにブレーキ操作を開始させ、余裕をもって車両を減速させることができる障害物情報呈示装置を提供することにある。
【0007】
【課題を解決するための手段】
上記目的を達成するため、請求項1の発明では、走行路の形状に関する情報を検出する道路形状情報検出手段と、路車間通信により走行路に存在する障害物に関する情報を検出する障害物情報検出手段と、道路形状情報検出手段の検出結果に基づいて運転者が障害物を目視可能な障害物と車両との間の最大距離として視程距離を算出する視程距離算出手段と、障害物情報検出手段が障害物を検出したときに、所定の減速度をもって障害物手前で停止可能な減速距離に相当するタイミングで警報を発する警報呈示手段とを備え、警報呈示手段が、視程距離が減速距離以下のときに、視程距離に相当するタイミング近傍においても警報を発するようにしたものである。
【0008】
視程距離が減速距離以下のときには、減速距離に相当するタイミングで警報が発せられても、運転者は障害物を目視できないため呈示に呼応してアクセル操作を中止するだけであり、その後に実際に障害物を目視した時点でブレーキ操作を開始する。このときの運転者は警報に基づいて事前に障害物の存在を認識しているため、障害物を目視すると直ちにブレーキ操作を開始するが、警報から注意を逸らされて障害物の存在を忘れた場合には、目視した対象が障害物であること、つまり、走行中の先行車等とは異なってブレーキ操作を要することを認識する必要が生じ、認識に要する時間だけブレーキ操作が遅れてしまう。
【0009】
ここで、視程距離に相当するタイミング近傍、例えば視程距離と一致するタイミングや若干早いタイミングで警報が発せられると、運転者はこの警報に基づいて注意を喚起されて、改めて障害物の存在を認識する。その結果、上記した障害物Zの存在を認識し続けた場合と同じく、運転者は障害部Zを目視した時点で直ちにブレーキ操作を開始し、より低い減速度をもって障害物の手前で停止可能となる。
【0010】
又、請求項2の発明では、警報呈示手段が、減速距離に相当するタイミングで発した警報を継続すると共に、警報内容を視程距離に相当するタイミングで変更するものである。従って、視程距離に相当するタイミングで警報内容が変更されるため、その変化に基づいて運転者の注意を確実に喚起可能となる。
更に、請求項3の発明では、警報呈示手段が、減速距離に相当するタイミングで発した警報を所定時間後に中止すると共に、その後に視程距離に相当するタイミングで再度警報を発するものである。従って、視程距離に相当するタイミングで警報が再度発せられるため、その警報に基づいて運転者の注意を確実に喚起可能となる。
【0011】
【発明の実施の形態】
以下、本発明を運転支援装置に具体化した一実施形態を説明する。
図1は本実施形態の運転支援装置を示す全体構成図である。本実施形態の運転支援装置は運転者の運転操作の総合的な支援を目的としたものであり、車間距離制御、レーン逸脱防止、後側方監視等の機能と共に、本発明に係る障害物情報の呈示機能を備えている。
【0012】
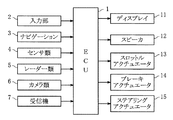
運転支援装置の全体的な制御を実行するECU(電子コントロールユニット)1は車室内に設置されており、図示しない入出力装置、記憶装置(ROM、RAM等)、中央処理装置(CPU)、タイマカウンタ等を備えている。ECU1の入力側には、運転支援装置を操作するための入力部2、地図情報のデータベースやGPS(グローバル・ポジショニング・システム)等からなるナビゲーション装置3、車速、アクセル開度、操舵角、ブレーキ圧、ウインカ等を検出するための各種センサ類4、先行車等を検出するためのレーダー類5、自車前方の白線を撮像する前方カメラや自車後側方の周辺車両を撮像する後側方カメラ等のカメラ類6、道路インフラ(路上に設置された情報提供装置)から送信される情報を受信するための受信機7等が接続されている。又、ECU1の出力側には、インストルメントパネル上に設置された液晶式のディスプレイ11及びスピーカ12、エンジンのスロットルを操作するためのスロットルアクチュエータ13、車両のブレーキを操作するためのブレーキアクチュエータ14、車両の操舵系にトルクを付加するためのステアリングアクチュエータ15等が接続されている。
【0013】
そして、ECU1はナビゲーション装置3からの地図情報や位置情報、センサ類4やレーダー類5からの検出情報、カメラ類6からの画像情報等に基づいて運転操作を支援するための種々の制御を実行する。例えば、自車と先行車との車間距離や相対速度に基づきスロットルやブレーキを操作して、所定の車間距離を保つ車間距離制御、自車レーンの白線画像に基づいて自車のレーン逸脱を防ぐ方向に弱い操舵トルクを発生させるレーン逸脱防止、周辺車両の画像に基づいて周辺車両を妨害する車線変更が行われたときに、車線変更を防ぐ方向に弱い操舵トルクを発生させると共に警報を発する後側方監視、前方に障害物が存在する場合に、障害物の呈示を実行して運転者に認識させる障害物情報の呈示等の各種制御を実行する。
【0014】
一方、上記道路インフラは、例えば図2に示すように、ビル21や並木22により運転者の前方視界が制限されるブラインドコーナー等に設置されている。この道路インフラは、カメラ装置23と路側アンテナ装置24とから構成され、カメラ装置23にて撮像されたコーナー奥の画像が解析されて障害物Zの有無が判定され、その障害物Zの情報と予め判明している道路インフラを中心とした所定エリアE内の道路形状に関する情報とが路側アンテナ装置24から送信されるようになっている。尚、これらの情報は、エリアE内に侵入直後の地点に設定された基点マーカーMを基準として表され、その情報に基づくECU1の演算処理も全て基点マーカーMを基準として行われる。具体的には、ECU1は自車Rが基点マーカーMを通過した時点で演算上の自車位置をリセットする一方、例えば、道路インフラから提供される基点マーカーMと障害物Zとの距離を自車位置に照らし合わせて、自車Rから障害物Zまでの距離を割り出す。
【0015】
上記した障害物情報の呈示処理は、道路インフラからの情報を利用して、基点マーカーMを通過した後に行われ、以下、当該処理の詳細を説明する。
ECU1は図3,4に示す障害物情報呈示ルーチンを所定の制御インターバルで実行する。まず、ECU1はステップS2で道路インフラからの情報に基づいて前方に障害物Zが存在するか否かを判定し、NO(否定)のときにはルーチンを終了する。又、YES(肯定)の判定を下したときには、ステップS4に移行して道路インフラから詳細情報を取り込む。具体的には、道路形状に関する情報として、カーブ半径、半径の変化点、レーン幅等を取り込み(道路形状情報検出手段)、障害物Zに関する情報として、基点マーカーMから障害物Zまでの距離、障害物Zが存在するレーン位置、障害物Zの移動速度等を取り込む(障害物情報検出手段)。
【0016】
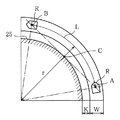
続くステップS6では自車のセンサ類4の情報、即ち、上記した車速、アクセル開度、操舵角、ブレーキ圧、ウインカ等を取り込み、ステップS8で視程距離Lの算出処理を行う(視程距離算出手段)。視程距離Lとは、図2に示したように運転者の前方視界が制限されているときに、目視可能な最大距離を意味する。図5では防音壁25により前方視界が制限される場合を示しているが、視程距離Lは直線距離A−C−Bではなく、レーンに沿った円弧距離A−Bとして算出される。よって、視程距離Lは以下の関係式(1)により表され、ステップS8ではこの式(1)に従って視程距離Lを算出する。
【0017】
【数1】

ここに、rはカーブ半径、Wはレーン幅、Kはレーンの端から防音壁25までの距離であり、カーブ半径rとレーン幅Wについては、道路インフラから道路情報として取り込まれ、Kについては、予め設定した規定値として取り扱っている。尚、レーン数が2つの場合には、内側のレーンについては、上式(1)を適用して視程距離Lを算出し、外側のレーンについては、詳細は説明しないが、カーブ半径rにレーン幅Wを加算する等の対処により視程距離Lを算出できる。
【0019】
ECU1は続くステップS10で視程距離相当の呈示タイミング及び減速距離相当の呈示タイミングを算出する。視程距離相当の呈示タイミングとは、前記視程距離Lに相当する分だけ障害物Zより手前側のポイントを通過するタイミングであり、詳しくは、視程距離Lに相当するタイミングに余裕分として所定時間(例えば1sec)を加算して、障害物Zの目視より若干早いタイミングとして設定される。
【0020】
又、減速距離相当の呈示タイミングとは、図6に示すように、現在の車速Vaから所定減速度をもって自車Rを減速させた場合の停車までに走行する減速距離La(実際には、余裕を見込んだ呈示開始距離Lp)に相当するタイミングであり、換言すれば、この呈示タイミングで所定減速度により減速を開始すれば、障害物Zの手前で停止可能なことを意味している。
【0021】
以下、呈示開始距離Lpの算出手順を説明すると、まず、次式(2)に従って減速距離Laを算出する。
【0022】
そして、次式(3)に従って減速距離Laに余裕距離Lsを加算すると、呈示開始距離Lpを求めることができる。
Lp=La+Ls………(3)
その後、ECU1はステップS12で障害物Zが存在することをディスプレイ11やスピーカ12により呈示する。尚、この時点では障害物Zまでの距離に余裕があるため、図7に示すように障害物Zの存在を呈示するだけに止め、障害物Zまでの距離等の詳細情報は表示しない。
【0023】
続くステップS14では運転者による回避操作が行われたか否かを判定する。
例えばブレーキ操作や車線変更等の回避操作が行われたときには、YESの判定を下してルーチンを終了する。又、回避操作が行われずにステップS14でNOの判定を下したときには、ステップS16に移行して減速距離相当の呈示タイミングに達したか否か、つまり、障害物Zと自車Rとの距離が呈示開始距離Lp未満になったか否かを判定する。
【0024】
ステップS16の判定がNOのときにはステップS18に移行し、前記視程距離Lが呈示開始距離Lp以上であるか否かを判定する。判定がYESのとき、即ち、減速距離相当の呈示タイミングに達した時点で運転者が障害物Zを目視可能と予測されるときには、そのままルーチンを終了する。この場合、ECU1はステップS2〜18の処理を繰り返し、自車Rが次第に障害物Zに接近して、減速距離相当の呈示タイミングに達したとしてステップS16でYESの判定を下すと、ステップS20で通常呈示処理を実行する。例えば図8に示すように、ディスプレイ11上に障害物Zまでの距離を点滅表示する一方、スピーカー12から断続的な警告音と共に障害物Zまでの距離をアナウンスする。
【0025】
一方、前記ステップS16からステップS18に移行してNOの判定を下したとき、即ち、減速距離相当の呈示タイミングに達した時点で運転者が障害物Zを目視不能と予測されるときには、ステップS22に移行して視程距離相当の呈示タイミングに達したか否かを判定する。この時点では未だ減速距離相当の呈示タイミングにも達していないため、ステップS22ではNOの判定を下してルーチンを終了する。
【0026】
この場合、ECU1はステップS2〜18,22の処理を繰り返し、自車Rが次第に障害物Zに接近すると、まず、減速距離相当の呈示タイミングに達したとして、ステップS16からステップS18に移行して通常呈示処理を実行し、その後、視程距離相当の呈示タイミングに達すると、ステップS22からステップS24に移行して変更呈示処理を実行する(警報呈示手段)。
【0027】
この変更呈示処理では、通常呈示処理に比較してディスプレイ11上の距離の点滅速度を速めたり、スピーカ12からの警告音をより高音に変更したりして差別化を図っている。従って、視程距離相当の呈示タイミングで通常呈示処理から変更呈示処理への切換が行われると、運転者は表示や警告音の変化に基づいて確実に注意を喚起されることになる。尚、この変更呈示処理の実行時には別の呈示手段を加えてもよく、例えば、ディスプレイ11やスピーカ12と並行して、ヘッドアップディスプレイ(HUD)により障害物Zに関する警告をフロントウインドに投影させるようにしてもよい。
【0028】
次に、以上のECU1の呈示処理によって行われる車両の減速状況を説明する。
図9は減速距離相当の呈示タイミングで障害物Zを目視可能(L>Lp)なときの車両の減速状態を示すタイムチャートである。図に示すように、車両の走行に伴って障害物Zとの距離は減少し、呈示開始距離Lpまで減少したポイントa(即ち、減速距離相当の呈示タイミング)でステップS20の呈示処理が行われ、運転者によるブレーキ操作が開始されて、車両が減速し始める。つまり、このときには、ステップS20の呈示処理が行われる時点で運転者は障害物Zを目視しているため、ためらうことなく速やかにブレーキ操作を行う。
【0029】
尚、運転者の反応時間の関係で、実際のブレーキ操作は呈示処理から若干遅れるが、この図9及び以下の図10では、操作遅れを省略して表している。又、呈示開始距離Lpは上式(2)から算出されるため、実際には車速Vaと共に減少するが、各図では簡略化して一定として表している。
一方、図10は減速距離相当の呈示タイミングで障害物Zを目視不能(L≦Lp)なときの車両の減速状態を示すタイムチャートである。図に示すように、この場合の運転者は、ステップS20の通常呈示処理が行われるポイントbの時点では障害物Zを目視できず、従来技術でも説明したように、呈示に呼応してアクセル操作を中止するだけであり、その後の視程距離Lに到達したポイントcの時点で障害物Zを目視して、ブレーキ操作を開始することになる。
【0030】
そして、運転者は先行する通常呈示処理により事前に障害物Zの存在を認識しているため、通常であればポイントcで障害物Zを目視すると、実線で示すように直ちにブレーキ操作を開始する。しかしながら、例えば対向車とのすれ違い等の些細なきっかけにより、運転者が通常呈示処理から注意を逸らされて障害物Zの存在を忘れた場合には、目視した対象が障害物Zであること、つまり、走行中の先行車等とは異なってブレーキ操作を要することを認識する必要が生じ、破線で示すように認識に要する時間tだけブレーキ操作が遅れてしまう。
【0031】
ここで、本実施形態では、上記のように視程距離相当の呈示タイミング、つまり、運転者が障害物Zを目視する視程距離Lのタイミングより若干早いL’で示すタイミングで、通常呈示処理から変更呈示処理への切換が行われるため、運転者は表示や警告音の変化に基づいて確実に注意を喚起されて、改めて障害物Zの存在を認識する。その結果、上記した障害物Zの存在を認識し続けた場合と同じく、運転者は障害部Zを目視したポイントcで、実線のように直ちにブレーキ操作を開始する。
【0032】
以上のように本実施形態の運転支援装置では、減速距離相当の呈示タイミングで障害物Zを目視不能(L≦Lp)なときには、減速距離相当の呈示タイミングの通常呈示処理に加えて、障害物Zを目視する直前の視程距離相当の呈示タイミングで変更呈示処理を実行するようにしたため、譬え障害物Zの存在を忘れた場合であっても、呈示処理の切換により運転者は注意を喚起されて改めて障害物Zの存在を認識し、障害物Zを目視した時点で直ちにブレーキ操作を開始する。従って、ブレーキ操作時に要求される減速度が低くなることから、このようなブラインドコーナーであっても十分に余裕をもって車両を減速させることができる。
【0033】
以上で実施形態の説明を終えるが、本発明の態様はこの実施形態に限定されるものではない。例えば、上記実施形態では、障害物情報の呈示機能を含めた運転操作の総合的な支援を目的とする運転支援装置に具体化したが、障害物情報の呈示機能のみに絞った障害物情報呈示装置に具体化してもよい。
又、上記実施形態では、障害物Zに関する情報に加えて道路形状に関する情報も道路インフラから得たが、道路形状については他の情報源から得てもよく、例えばナビゲーション装置3を利用して、GPSの自車位置に基づいて地図データベースから自車周囲の道路形状を割り出してもよい。
【0034】
更に、上記実施形態では、減速距離相当のタイミングから通常呈示処理を継続し、指定距離相当の呈示タイミングで変更呈示処理に切換えることで運転者の注意を喚起したが、例えば、減速距離相当のタイミングで通常呈示処理を所定時間実行した後に中止し、その後に視程距離相当の呈示タイミングで変更呈示処理を実行するようにしてもよい。この場合でも、呈示処理が再度行われることにより運転者の注意が喚起されるため、上記実施形態と同様の作用効果を得ることができる。
【0035】
一方、上記実施形態では、視程距離相当の呈示タイミングを、視程距離Lに相当するタイミングより所定時間早いタイミングに設定したが、この視程距離相当の呈示タイミングは視程距離Lに相当するタイミングの近傍であればよく、例えば、視程距離Lに相当するタイミングと完全に一致させてもよい。
【0036】
【発明の効果】
以上説明したように請求項1の発明の障害物情報呈示装置によれば、減速距離に相当するタイミングで障害物を目視不能なときに、減速距離に相当するタイミングに加えて、視程距離に相当するタイミング近傍においても警報を発するようにしたため、運転者が障害物の存在を忘れた場合であっても、警報に基づいて障害物の存在を認知させ、障害物を目視した時点で直ちにブレーキ操作を開始させて、余裕をもって車両を減速させることができる。
【0037】
又、請求項2の発明の障害物情報呈示装置によれば、請求項1の発明に加えて、視程距離に相当するタイミングで警報内容を変更するようにしたため、その変化に基づいて運転者の注意を確実に喚起することができる。
更に、請求項3の発明の障害物情報呈示装置によれば、請求項1の発明に加えて、視程距離に相当するタイミングで警報を再度発するようにしたため、その警報に基づいて運転者の注意を確実に喚起することができる。
【図面の簡単な説明】
【図1】実施形態の運転支援装置を示す全体構成図である。
【図2】道路インフラの設置状態を示す説明図である。
【図3】ECUが実行する障害物情報呈示ルーチンを示すフローチャートである。
【図4】ECUが実行する障害物情報呈示ルーチンを示すフローチャートである。
【図5】ブラインドコーナーでの視程距離を表す説明図である。
【図6】障害物に対する呈示タイミングの関係を示す説明図である。
【図7】障害物の存在のみを呈示したときのディスプレイ表示を示す説明図である。
【図8】障害物までの距離を呈示したときのディスプレイ表示を示す説明図である。
【図9】通常呈示処理のみを行ったときの車両の減速状態を示すタイムチャートである。
【図10】通常呈示処理に加えて変更呈示処理を行ったときの車両の減速状態を示すタイムチャートである。
【符号の説明】
1 ECU(視程距離算出手段、警報呈示手段)
7 受信機(道路形状情報検出手段、障害物情報検出手段)
Claims (3)
- 走行路の形状に関する情報を検出する道路形状情報検出手段と、
路車間通信により上記走行路に存在する障害物に関する情報を検出する障害物情報検出手段と、
上記道路形状情報検出手段の検出結果に基づいて運転者が障害物を目視可能な該障害物と車両との間の最大距離として視程距離を算出する視程距離算出手段と、
上記障害物情報検出手段が障害物を検出したときに、所定の減速度をもって障害物手前で停止可能な減速距離に相当するタイミングで警報を発する警報呈示手段とを備え、
上記警報呈示手段は、上記視程距離が減速距離以下のときに、該視程距離に相当するタイミング近傍においても警報を発することを特徴とする障害物情報呈示装置。 - 上記警報呈示手段は、上記減速距離に相当するタイミングで発した警報を継続すると共に、該警報内容を上記視程距離に相当するタイミングで変更することを特徴とする請求項1に記載の障害物情報呈示装置。
- 上記警報呈示手段は、上記減速距離に相当するタイミングで発した警報を所定時間後に中止すると共に、その後に上記視程距離に相当するタイミングで再度警報を発することを特徴とする請求項1に記載の障害物情報呈示装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2001220165A JP4662007B2 (ja) | 2001-07-19 | 2001-07-19 | 障害物情報呈示装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2001220165A JP4662007B2 (ja) | 2001-07-19 | 2001-07-19 | 障害物情報呈示装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2003030797A JP2003030797A (ja) | 2003-01-31 |
| JP4662007B2 true JP4662007B2 (ja) | 2011-03-30 |
Family
ID=19054025
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2001220165A Expired - Fee Related JP4662007B2 (ja) | 2001-07-19 | 2001-07-19 | 障害物情報呈示装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4662007B2 (ja) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP2925024A1 (en) | 2014-03-26 | 2015-09-30 | Fraunhofer-Gesellschaft zur Förderung der angewandten Forschung e.V. | Apparatus and method for audio rendering employing a geometric distance definition |
| WO2018178844A1 (en) * | 2017-03-31 | 2018-10-04 | 3M Innovative Properties Company | Situational awareness sign system |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0652500A (ja) * | 1992-08-03 | 1994-02-25 | Mazda Motor Corp | 車両の走行安全装置 |
| JPH1153695A (ja) * | 1997-07-31 | 1999-02-26 | Toyota Motor Corp | カーブ路警報装置 |
| JP2000030199A (ja) * | 1998-07-14 | 2000-01-28 | Toyota Motor Corp | 車両運転支援装置 |
| JP3436202B2 (ja) * | 1999-09-30 | 2003-08-11 | トヨタ自動車株式会社 | 走行支援用の車載装置および走行支援方法 |
| JP2002367099A (ja) * | 2001-06-12 | 2002-12-20 | Nissan Motor Co Ltd | 車両用情報処理装置 |
-
2001
- 2001-07-19 JP JP2001220165A patent/JP4662007B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2003030797A (ja) | 2003-01-31 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US11104348B2 (en) | Vehicle alarm apparatus | |
| JP6611085B2 (ja) | 車両制御装置 | |
| JP5282816B2 (ja) | 運転支援システム | |
| JP2010030513A (ja) | 車両の運転支援装置 | |
| JP2017033542A (ja) | 情報表示装置 | |
| KR101552017B1 (ko) | 성능이 개선된 운전보조시스템 및 그 제어방법 | |
| WO2013153660A1 (ja) | 運転支援装置 | |
| WO2020002962A1 (ja) | 走行支援方法及び車両制御装置 | |
| JP2006275690A (ja) | 運転支援装置 | |
| JP2021172096A (ja) | 車両制御システム | |
| JP4582279B2 (ja) | 障害物情報呈示装置 | |
| JP2019139401A (ja) | 衝突回避支援装置、プログラム、衝突回避支援方法 | |
| CN202175009U (zh) | 车辆用驾驶辅助装置 | |
| JP6462492B2 (ja) | 車両の運転支援装置、及び運転支援方法 | |
| JP2016224712A (ja) | 車両の運転支援装置、及び運転支援方法 | |
| US20230286497A1 (en) | Collision avoidance device, collision avoidance method and collision avoidance program | |
| JP2016224553A (ja) | 車両用交通情報表示システム | |
| JP4807482B2 (ja) | 障害物情報呈示装置 | |
| JP5272902B2 (ja) | 車両走行支援装置および車両走行支援方法 | |
| JP7639662B2 (ja) | 車両 | |
| CN103754226B (zh) | 驾驶辅助系统以及由驾驶辅助系统执行的方法 | |
| US20250242801A1 (en) | Travel control device and method for vehicle | |
| JP2002302026A (ja) | 車両の運転支援装置 | |
| JP4662007B2 (ja) | 障害物情報呈示装置 | |
| JP4803336B2 (ja) | 障害物情報呈示装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20071219 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20100825 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20101018 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20101208 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20101221 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 4662007 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140114 Year of fee payment: 3 |
|
| LAPS | Cancellation because of no payment of annual fees |