JP4709409B2 - ブーム伸縮機構の制御装置 - Google Patents
ブーム伸縮機構の制御装置 Download PDFInfo
- Publication number
- JP4709409B2 JP4709409B2 JP2001099280A JP2001099280A JP4709409B2 JP 4709409 B2 JP4709409 B2 JP 4709409B2 JP 2001099280 A JP2001099280 A JP 2001099280A JP 2001099280 A JP2001099280 A JP 2001099280A JP 4709409 B2 JP4709409 B2 JP 4709409B2
- Authority
- JP
- Japan
- Prior art keywords
- boom
- contraction
- telescopic
- cylinder
- expansion
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Lifetime
Links
Images













Landscapes
- Control And Safety Of Cranes (AREA)
- Jib Cranes (AREA)
Description
【発明の属する技術分野】
本発明は、移動式クレーンのブーム伸縮機構の制御装置に関し、特に1本の伸縮シリンダによる伸縮機構に使用される制御装置に関するものである。
【0002】
【従来の技術】
図15に伸縮機構の制御装置に用いられる従来の技術によるブーム長さ検出器を示す。7は伸縮ブーム10のベースブーム11の側面に取付られた長さ検出器であって、当該長さ検出器7から伸縮ブーム基端方向へ引き出されたコード8は、ベースブーム11側面に枢支されたシーブ9によりその方向を変えられ、各段ブームに設けられたガイド46、46・・に支持された後、その先端はトップブーム16先端部に設けられたサポート47につながれている。前記長さ検出器7は、引き出されたコード8の長さに応じた信号を出力するようになっており、上述した伸縮ブーム10への取付により、伸縮ブーム10のブーム長さが検出できるようになっている。
【0003】
また、上記長さ検出器7が使用される伸縮ブーム10の伸縮機構は、一般に複数の伸縮シリンダが用いられ、さらにシーブとワイヤからなる伸縮機構が付加されることも多い。その場合、上記伸縮ブーム10を構成する各段のブーム(セカンドブーム12、サードブーム13、フォースブーム14等)の伸縮順序はその伸縮機構により一定のものとされていた。そのため、上記長さ検出器7でブーム長さを検出しておけば、そのブーム長さにより、各段のブームの伸長状態は一義的に判断が可能であった。そのため、伸縮ブーム10の伸縮制御において、また、過負荷防止装置による吊り上げ性能制御においても、伸縮ブームの伸縮状態に関しては上記長さ検出器7が検出したブーム長さのみによってその制御が可能であった。
【0004】
【発明が解決しようとする課題】
ところが、近年実用化された1本の伸縮シリンダによる伸縮機構を用いた伸縮ブームでは、同じブーム長さであっても比較するブーム段の伸長割合が異なるというブーム伸長状態がありうるものとなっている。そのため、従来のブーム長さ検出器を用いた制御装置では、各段のブームの伸長割合が把握できないため、伸縮動作の制御および過負荷防止装置によるクレーンの吊り上げ性能の制御が不可能であった。
【0005】
そこで、本発明は、1本の伸縮シリンダによる伸縮機構を用いた伸縮ブームであっても、その伸縮動作の制御および過負荷防止装置によるクレーンの吊り上げ性能の制御が可能となるようにブーム状態検出ができるブーム伸縮機構の制御装置を提供しようとするものである。
【0006】
【課題を解決するための手段】
本願の請求項1の発明は、伸縮ブームと、一本の伸縮シリンダと、シリンダ・ブーム連結手段と、ブーム間固定手段と、固定ピン駆動手段と、から構成され、シリンダ・ブーム連結行程と、ブーム間固定解除行程と、目的ブーム伸縮行程と、ブーム間固定行程と、シリンダ・ブーム連結解除行程と、伸縮シリンダ伸縮行程と、からなる行程を繰り返すことにより前記伸縮ブームの伸縮を行うブーム伸縮機構の制御装置において、
当該ブーム伸縮機構の制御装置は、前記目的ブーム伸縮行程における前記伸縮シリンダの伸縮長さを検出するシリンダ長さ検出手段と、当該シリンダ長さ検出手段の検出値に基き、記憶している前記ブーム間固定手段の固定穴の位置により決定される仕様伸縮長さを読み出し、当該仕様伸縮長さを前記目的ブーム伸縮行程における伸縮長さとするコントローラと、から構成されたことを特徴とする。
【0007】
この構成により、本願発明のブーム伸縮機構の制御装置は、記憶している前記ブーム間固定手段の固定穴の位置により決定される仕様伸縮長さを読み出し、当該仕様伸縮長さを前記目的ブーム伸縮行程における伸縮長さとしているので、ブーム伸縮長さとして誤差を有しない正確な数値を把握することができるのである。
【0008】
請求項2の発明は、請求項1の構成に加えて、前記コントローラが記憶する前記仕様伸縮長さは、前記ブーム間固定手段の固定ピンと外側ブーム固定穴とのガタ寸法を含まない値とすることを特徴としている。
【0009】
これにより、前記コントローラが記憶する前記仕様伸縮長さを前記ブーム間固定手段の固定ピンと外側ブーム固定穴とのガタ寸法を含まない値としているので、ほぼ現実の伸縮ブームの伸縮長さをその数値とすることができるのである。
【0010】
請求項3の発明は、請求項1の構成に加えて、前記ブーム伸縮機構の制御装置は、前記目的ブーム伸縮行程前における伸縮動作前ブーム状態を記憶した記憶手段と、当該記憶手段から読み出した伸縮動作前ブーム状態と前記目的ブーム伸縮行程における伸縮長さとから伸縮動作後ブーム状態を判断するコントローラと、から構成されていることを特徴とする。
【0011】
この構成により、前記記憶手段が記憶した各ブーム段の伸長割合からなる伸縮動作前ブーム状態に基き、目的ブーム伸縮行程における伸縮長さとから伸縮動作後の各ブーム段の伸長割合からなる伸縮動作後ブーム状態を判断するので、1本の伸縮シリンダによる伸縮機構を用いた伸縮ブームであっても、伸縮制御および過負荷防止装置によるクレーンの吊り上げ性能の制御が可能となるのである。
【0012】
請求項4の発明は、請求項3の構成に加えて、前記ブーム伸縮機構の制御装置は、ブーム伸縮動作における最終のブーム状態を入力する最終ブーム状態入力手段と、当該最終ブーム状態入力手段により入力された最終ブーム状態と前記伸縮動作後ブーム状態とを記憶する記憶手段と、を有することを特徴としている。
【0013】
この構成によれば、最終ブーム状態入力手段により最終のブーム状態、すなわち最終の各段ブームの伸長割合を入力することができ、また、前記記憶手段は前記最終の各段ブームの伸長割合と伸縮動作後の各段ブームの伸長割合を記憶しているので、前記ブーム伸縮機構の制御装置は前記伸縮動作後の各段ブームの伸長割合が前記最終の各段ブームの伸長割合となるまでその伸縮動作を継続する制御を行うことができるのである。
【0014】
請求項5の発明は請求項4の構成に加えて、前記ブーム伸縮機構の制御装置は、特定のブーム状態を入力する特定ブーム状態入力手段と、当該特定ブーム状態入力手段により入力された特定ブーム状態を前記伸縮動作後ブーム状態として記憶する記憶手段と、を有することを特徴としている。
【0015】
この構成により、ブーム伸縮機構の故障修理等の原因により前記記憶手段が記憶している前記伸縮動作後ブーム状態と現実のブーム状態が一致していないといった場合でも、前記特定ブーム状態入力手段により現実のブーム状態すなわち現実の各段ブームの伸長割合を入力し、それを前記伸縮動作後ブーム状態として記憶手段に記憶させることができるのである。
【0016】
請求項6の発明は請求項3、4または5の構成に加えて、前記記憶手段は、バックアップ電源機構付きメモリ又は不揮発性メモリであることを特徴としている。
【0017】
これにより、前記記憶手段を構成するバックアップ電源機構付きメモリ又は不揮発性メモリはたとえ電源が切られてもその記憶内容を保持するので、前記伸縮機構の制御装置は伸縮動作が中断された場合、あるいはクレーン作業が中断されて電源が切られたような場合にあっても、必要な情報を記憶しているので電源が再投入された際にも支障なくブーム伸縮機構の制御を継続することができるのである。
【0018】
請求項7の発明は、請求項3の構成に加えて、前記ブーム伸縮機構の制御装置は、前記伸縮ブームのベースブームとトップブーム間の距離を直接測定することにより測定ブーム長さを求める第2ブーム長さ検出手段と、前記伸縮動作後ブーム状態におけるブーム長さと前記測定ブーム長さを対比し、そのブーム長さの差が所定値を越えたときに前記記憶手段が記憶した伸縮動作後ブーム状態が異常と判断するコントローラと、から構成されていることを特徴としている。
【0019】
この構成により、前記コントローラは前記記憶手段が記憶している前記伸縮動作後ブーム長さが何らかの原因で前記第2ブーム長さ検出手段が検出したブーム長さと一致しなくなった場合に前記伸縮動作後ブーム長さを異常と判断するので、警報あるいは伸縮動作の自動停止等の制御が可能となるのである。
【0020】
請求項8の発明は、請求項7の構成に加えて、前記ブーム伸縮機構の制御装置は、前記伸縮動作後ブーム状態に基く通常時吊り上げ性能と前記測定ブーム長さに基く故障時吊り上げ性能を記憶した吊り上げ性能記憶手段と、通常は前記通常時吊り上げ性能を前記吊り上げ性能記憶手段から読み出し、前記伸縮動作後ブーム長さを異常と判断したときには、前記故障時吊り上げ性能を前記吊り上げ性能記憶手段から読み出すコントローラと、から構成されたことを特徴としている。
【0021】
この構成により、前記コントローラは前記伸縮動作後ブーム長さを異常と判断したときには、前記第2ブーム長さ検出手段により直接検出したブーム長さに基く故障時吊り上げ性能を移動式クレーンの吊り上げ性能とするので、より安全なクレーン制御が可能となるのである。
【0022】
【発明の実施の形態】
1本の伸縮シリンダによるブーム伸縮機構の構成
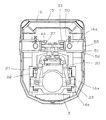
図1は1本の伸縮シリンダによる伸縮機構が使用された6段伸縮ブームの伸縮シリンダに沿った断面図であって、全縮小状態の基端部を示している。伸縮ブーム10はベースブーム11内に、セカンドブーム12、サードブーム13、フォースブーム14、フィフスブーム15、およびトップブーム16がそれぞれ伸縮自在に嵌挿されて構成されている。1は伸縮シリンダであって、シリンダチューブ2、シリンダチューブロッド側端部3、ロッド4、ロッド端部5とから構成されている。伸縮シリンダ1は、前記伸縮ブーム10に内装されており、前記ベースブーム11の基端部11aに前記伸縮シリンダロッド端部5が軸支されている。以下、1本の伸縮シリンダによる伸縮機構の主要構成を分説する。
(シリンダ・ブーム連結手段)
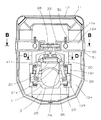
図2は図1のA−A断面図である。20はシリンダ・ブーム連結手段であって、前記伸縮シリンダ1のシリンダチューブロッド側端部3に配置された連結ピン駆動シリンダ21、連結ピン駆動レバー22、連結ピン23、および前記セカンドブーム基端部12aに配置された連結ボス12cの連結穴12bから構成されている。連結ピン23は前記伸縮シリンダロッド側端部3を構成するトラニオン部材25の連結ピン収納穴26に摺動可能に組み付けられている。連結ピン駆動レバー22は、前記トラニオン部材25から上方に一体構成されたサポート24に揺動可能に軸支されている。図2では連結穴12bは、セカンドブーム基端部12aに設けられたもののみ示しているが、図1で二点鎖線で示すようにサードブーム基端部13a、フォースブーム基端部14a、フィフスブーム基端部15a、トップブーム基端部16aにも同様にそれぞれ連結穴13b、14b、15b、16bが設けられている。
【0023】
前記連結ピン23と連結ピン駆動レバー22は左右に一対配置されている。連結ピン駆動レバー22の一端は連結ピン23に枢着され、その他端は前記連結ピン駆動シリンダ21のロッド側端部21aおよびシリンダ側端部21bにそれぞれ枢着されている。
【0024】
なお、28はインタロック部材であって、前記連結ピン駆動レバー22の他端の長穴に軸支されており、後述する固定ピンとの間でインタロック機構を構成するものである。
(ブーム間連結手段)
30はセカンドブーム12のブーム間連結手段であって、セカンドブーム基端部12aの固定ピン収納部材12eに摺動可能に組み付けられたセカンドブーム固定ピン12dとベースブーム11の側面に取付られた固定ボス31に設けられた固定穴32とから構成されている。33はセカンドブーム固定ピン12dの内端に位置して設けられた連結部材である。連結部材33は一部が開口した箱型形状をしており、後述する固定ピン駆動手段の固定ピン駆動レバーと連結可能となっている。図2に示すようにセカンドブーム固定ピン12dは左右に一対配置されている。同様に、図示しないサードブーム基端部13a、フォースブーム基端部14a、フィフスブーム基端部15a、トップブーム基端部16aにも同様にそれぞれサードブーム固定ピン13d、フォースブーム固定ピン14d、フィフスブーム固定ピン15d、トップブーム固定ピン16dが左右に一対配置されている。
【0025】
また、上述したベースブーム側面に取付られた固定ボス31の他に、ベースブーム側面にはその長手方向にセカンドブーム12の伸長長さに応じて複数個の固定ボスが配置されており、各固定ボスはそれぞれ固定穴を有している。固定ボスの配置に関しては、セカンドブーム12、サードブーム13、フォースブーム14およびフィフスブーム15においてもほぼ同様の構成である。
【0026】
図3は図2のB−B矢視図である。34は固定ピン12dのボールロック機構である。前記固定ピン12dにはノッチ36が切られており、ボールロック機構34のバネ付勢されたボール35が当該ノッチ36にはまり込むことにより、前記固定ピン12dはその先端部38が前記外側ブームの固定穴32に入ったブーム間固定位置で位置保持されるようになっている。
【0027】
以上のように1本の伸縮シリンダによる伸縮機構においては、あるブーム段のブームとその外側のブームとの関係における伸長状態は、上述したブーム間連結手段の前記固定ピンが外側ブームのどの固定穴と連結状態にあるかによって決定されるものである。そのため、ブーム伸縮機構の制御装置はブーム伸長状態を各段のブーム間連結手段がどの固定穴と連結状態にあるかということを記憶することにより伸縮ブーム10のブーム長さすなわちブーム状態を算出するようになっている。
(固定ピン駆動手段)40は固定ピン駆動手段であって、固定ピン駆動シリンダ41、固定ピン駆動レバー42、ローラー44とから構成されている。固定ピン駆動レバー42は前記伸縮シリンダ1のシリンダチューブロッド側端部3と一体に形成されたサポート45に揺動自在に軸支されており、かつ左右一対配置されている。固定ピン駆動レバー42の一端にはローラー44が回転自在に軸支されており、その他端には前記固定ピン駆動シリンダ41のロッド側端部41a及びシリンダ側端部41bにそれぞれ枢着されている。
【0028】
固定ピン駆動手段40はその全体が伸縮シリンダ1のシリンダチューブロッド側端部3と一体構造となっている。そのため、伸縮シリンダ1の伸縮動作により各段ブームの基端部に配置された前記セカンドブーム12のブーム間固定手段30等の固定ピン12d〜16dのうちの任意の固定ピンの連結部材33内に前記ローラ44を位置させることができ、当該固定ピンを駆動することが可能となっている。その際の伸縮シリンダ1の伸縮動作時には、前記固定ピンの内端部に設けられた連結部材33は一部が開口した箱型形状をしているため、前記固定ピン駆動レバー42は目的としない固定ピンの連結部材33の開口部分を通過していくことができるようになっている。
ブーム伸縮機構の制御装置の構成
図4に、本発明の実施の形態に係るブーム伸縮機構の制御装置のブロック図を示す。
【0029】
60は伸縮操作手段であって、伸縮操作レバー61、マニュアル伸縮切換スイッチ62、最終ブーム状態入力手段63、特定ブーム状態入力手段64、グラフィック表示器70とから構成されており、図示しないクレーン運転室内に配置されている。伸縮操作レバー61は伸縮操作のレバー操作量を電気信号に変換し、コントローラ65に出力する。マニュアル伸縮切換スイッチ62は、前記ブーム伸縮機構の自動伸縮制御と、伸縮機構に関係する各種アクチュエータをそれぞれ個別操作できるマニュアル伸縮とを切換えるものであって、その切換信号は前記コントローラ65に出力するようになっている。
【0030】
最終ブーム状態入力手段63は、後述するグラフィック表示器と一体となって操作されるものであって、前記伸縮機構によって伸縮ブームを伸縮させる際に最終のブーム状態を入力するものである。最終ブーム状態入力手段63の操作信号も、前記コントローラ65に出力される。グラフィック表示器70は伸縮機構の操作に関する情報を、前記コントローラ65からの信号によりグラフィック表示するものである。特定ブーム状態入力手段64は、それまでコントローラ65が記憶していた伸縮動作後ブーム状態に関わりなく、その入力したブーム状態を現在のブーム状態としてコントローラ65に記憶させるためのものである。
【0031】
80はブーム基端位置検出手段であって、前記シリンダ・ブーム連結手段20がどのブームの基端位置に位置しているかを検出し、その信号を前記コントローラ65に出力するものである。当該ブーム基端位置検出手段80により前記シリンダブーム連結手段20がどのブーム段を連結しているかがコントローラに入力されるため、後述する目的ブーム伸縮行程後の伸縮動作後ブーム状態をコントローラ65が判断する際に伸縮対象となったブーム段を判断することができるのである。
【0032】
90はシリンダ長さ検出手段であって、前記伸縮シリンダ1のシリンダ長さを検出し、その信号を前記コントローラ65に出力するものである。コントローラ65は、当該シリンダ長さ検出手段90の検出値に基き、記憶している前記ブーム間固定手段の固定穴の位置により決定される仕様伸縮長さを読み出し、当該仕様伸縮長さを前記目的ブーム伸縮行程における伸縮長さとするのである。
【0033】
100は伸縮シリンダ伸縮制御手段であって、前記コントローラ65からの信号を受取り、前記伸縮シリンダ1を伸縮制御するものである。20はシリンダ・ブーム連結手段であって、前記コントローラ65からの信号により駆動される。110は連結ピン状態検出手段であって、前記シリンダ・ブーム連結手段20により駆動される連結ピンの状態を検出し、その信号を前記コントローラ65に出力するものである。40は固定ピン駆動手段であって、前記コントローラ65からの信号により駆動される。120は固定ピン状態検出手段であって、前記固定ピン駆動手段40により駆動される固定ピンの状態を検出し、その信号を前記コントローラ65に出力するものである。
【0034】
130は記憶手段であって、前記目的ブーム伸縮行程の前のブーム状態である伸縮動作前ブーム状態と、前記最終ブーム状態入力手段63により入力された最終ブーム状態と、前記目的ブーム伸縮行程の後のブーム状態である伸縮動作後ブーム状態とを記憶しているものである。記憶手段130は前記コントローラ65とデータをやり取りするようになっている。前記記憶手段130は、バックアップ電源機構付きメモリ又は不揮発性メモリが使用されている。これにより、前記記憶手段130を構成するバックアップ電源機構付きメモリ又は不揮発性メモリは、たとえ電源が切られてもその記憶内容を保持する。そのため、前記伸縮機構の制御装置は伸縮動作が中断された場合、あるいはクレーン作業が中断され、電源が切断されたような場合にあっても、必要な情報を記憶しているので電源が再投入された際にも支障なくブーム伸縮機構の制御を継続することができるのである。
【0035】
記憶手段130は、前記目的ブーム伸縮行程前における伸縮動作前ブーム状態を記憶しており、コントローラ65は、当該記憶手段130から読み出した伸縮動作前ブーム状態と前記目的ブーム伸縮行程における伸縮長さとから伸縮動作後ブーム状態を判断するようになっている。このため、前記記憶手段130が記憶した各ブーム段の伸長割合からなる伸縮動作前ブーム状態に基き、目的ブーム伸縮行程における伸縮長さとから伸縮動作後の各ブーム段の伸長割合からなる伸縮動作後ブーム状態を判断するので、1本の伸縮シリンダによる伸縮機構を用いた伸縮ブームであっても、伸縮制御および過負荷防止装置によるクレーンの吊り上げ性能の制御が可能となるのである。
【0036】
140は第2ブーム長さ検出手段であって、従来の技術で述べた長さ検出器7と同じものである。第2ブーム長さ検出手段140で検出された信号はコントローラ65に出力される。
【0037】
150は、前記伸縮動作後ブーム状態に基く通常時吊り上げ性能と前記測定ブーム長さに基く故障時吊り上げ性能を記憶した吊り上げ性能記憶手段である。コントローラ65は通常は前記通常時吊り上げ性能を前記吊り上げ性能記憶手段150から読み出し、前記伸縮動作後ブーム長さを異常と判断したときには、前記故障時吊り上げ性能を前記吊り上げ性能記憶手段150から読み出すようになっている。それにより、前記コントローラ65は前記伸縮動作後ブーム長さを異常と判断したときには、前記第2ブーム長さ検出手段140により直接検出したブーム長さに基く故障時吊り上げ性能を移動式クレーンの吊り上げ性能とするので、より安全なクレーン制御が可能となるのである。
【0038】
前記グラフィック表示器70はその表示内容を切換可能となっており、図12は前記グラフィック表示器70による第1の表示画面を示すものである。ブーム条件を表す伸縮ブームの伸長長さ71と各段ブームの伸長割合72が複数表示されており、前記最終ブーム状態入力手段63に含まれる送り・戻りキーにより箱型カーソル73を上下に移動できるようになっている。箱型カーソル73を目的とするブーム条件の行へ移動させたのち、前記最終ブーム状態入力手段63に含まれるセットキーを操作すると、前記コントローラ65に目的とする伸縮ブームの最終ブーム状態を入力することができる。選択した最終ブーム状態は、丸印74により表示される。図13は、前記グラフィック表示器70による第2の表示画面を示すものである。75は選択した最終ブーム状態を表示しており、76は伸縮動作途中における刻々変化する現時点でのブーム状態を示している。言い換えると、伸縮動作後ブーム状態を表示する。77は現時点でのブーム状態である前記伸縮動作後ブーム状態を絵表示するものである。
【0039】
以上のように最終ブーム状態を入力した後は、前記伸縮操作レバー61を操作し続けておけば、伸縮サイクルを繰り返し、前記記憶手段130が記憶する最終ブーム状態となるまで伸縮動作を自動的に行うのである。このように、最終ブーム状態入力手段63により最終のブーム状態、すなわち最終の各段ブームの伸長割合を入力することができ、また、前記記憶手段130は前記最終のブーム状態と伸縮動作後のブーム状態を記憶しているので、前記ブーム伸縮機構の制御装置は前記伸縮動作後ブーム状態が前記最終ブーム状態となるまでその伸縮動作を継続する制御を行うことができるのである。
【0040】
また、前記伸縮長さに用いる前記コントローラ65が記憶する前記仕様伸縮長さを前記ブーム間固定手段の固定ピンと外側ブーム固定穴とのガタ寸法を含まない値としているので、ほぼ現実の伸縮ブームの伸長長さをその数値とすることができるのである。
【0041】
コントローラ65は、前記記憶手段130が記憶した前記伸縮動作後ブーム状態におけるブーム長さと前記第2ブーム長さ検出手段140が検出した前記測定ブーム長さを対比し、そのブーム長さの差が所定値を越えたときに前記伸縮動作後ブーム状態が異常と判断する。そのため、前記記憶手段130が記憶している前記伸縮動作後ブーム長さが異常であるとの警報あるいは伸縮動作の自動停止等の制御が可能となるのである。
【0042】
図14は、前記ブーム基端位置検出手段80の具体例を示すものである。近接スイッチ82〜86がサポート81、81を介して前記伸縮シリンダ1のシリンダチューブロッド側端部3に位置するトラニオン25に取付けられている。12fは前記セカンドブーム基端部12aに取付けられた検出片である。図14は近接スイッチ82がセカンドブーム基端部12aの検出片12fを検出した状態を表している。同様に他のブーム基端部にも上記近接スイッチ83〜86に対応する位置に検出片13f〜16fが設けられており、前記近接スイッチ83〜86が上記検出片をそれぞれ検出するようになっている。この構成により、どの近接スイッチが検出片を検出しているかにより、前記シリンダ・ブーム連結手段20の連結ピン23がどのブームの基端部の連結穴に位置しているかが判断できるようになっている。
【0043】
図1には前記シリンダ長さ検出手段90が前記伸縮ブーム10に取付けられた状態を示している。シリンダ長さ検出手段90はベースブーム基端部11aに取付けられており、長さ検出器95から引き出されたコード91はガイドローラ92、93を介して、前記伸縮シリンダ1のシリンダチューブロッド側端部3のサポート94に連結されている。伸縮シリンダ1の伸縮動作に伴ない、前記コード91は長さ検出器95から出し入れされるようになっており、前記コード91の引き出し量により、伸縮シリンダ1のシリンダ長さが検出されるようになっている。
【0044】
図10は図2のD−D矢視図であって、前記連結ピン状態検出手段110の詳細を示したものである。112と113は前記連結ピン駆動シリンダ21のシリンダ部に取付けられた近接スイッチであり、111は前記連結ピン駆動シリンダ21のロッド部に取付られたコ字状の検出片である。図2はシリンダ・ブーム連結手段の連結ピン23がセカンドブーム12の連結穴12bに入ったシリンダ・ブーム連結状態となっており、この時前記一方の近接スイッチ112が前記検出片111を検出するようになっている。前記連結ピン駆動シリンダ21が駆動され、連結ピン23の先端部が前記連結穴12bから抜けると、他方の近接スイッチ113が前記検出片111を検出するようになっている。
【0045】
図3の120は前記固定ピン検出手段の具体例を示したものである。122と123は前記固定ピン駆動シリンダ41のシリンダ部に取付けられた近接スイッチであり、121は前記連結ピン駆動シリンダ41のロッド部に取付られたコ字状の検出片である。図3はセカンドブーム基端部12aの固定ピン12dの先端部38がベースブーム11の固定穴32に入ったブーム間固定状態となっており、この時前記一方の近接スイッチ122が前記検出片121を検出するようになっている。前記固定ピン駆動シリンダ41が駆動され、固定ピン12dの先端部38が前記固定穴32から抜けると、他方の近接スイッチ123が前記検出片121を検出するようになっている。
【0046】
図9は前記伸縮シリンダ伸縮制御手段100を構成する具体的な油圧回路の例を示したものである。伸縮シリンダ伸縮制御手段100は、前記伸縮シリンダ1、カウンタバランス弁104と油圧源、タンクとの間に介装されたパイロット式切換弁103、当該パイロット式切換弁103を切換えるパイロット圧を送る電磁比例弁101、102およびフロコン弁109から構成されている。当該電磁比例弁101と102は前記コントローラ65からの信号により比例制御されるようになっている。連結ピン駆動シリンダ21と固定ピン駆動シリンダ41はそれぞれ、ホースリール105、パイロットチェック弁106、ソレノイド切換弁107、108を介して油圧源とタンクに接続されており、ソレノイド切換弁107、108は前記コントローラ65からの信号により切換操作されるようになっている。
ブーム伸縮機構の制御装置の制御内容
図8(a)に示す6段伸縮ブーム10の全縮小状態から、(b)に示したトップブーム16が伸長した状態に至る間の伸縮機構の1サイクルに対応させて、本願発明の制御装置の制御内容を説明する。
(ブーム条件設定)伸縮ブーム10は全縮小状態にあると仮定する。このとき、図1に示したようにシリンダ・ブーム連結手段20はセカンドブーム12の基端部12bと連結状態にあり、各段ブームのブーム間固定手段は全て固定状態にあると仮定する。図4に示すマニュアル伸縮切換スイッチ62は自動伸縮側を選択している。最終ブーム状態入力手段63に含まれる送り・戻りキーにより図12に示されたグラフィック表示器70の第1の表示画面上でブーム条件を選択する。今は、仮にトップブーム(6段目)が93%伸長し、フィフスブーム(5段目)が93%伸長するNo.5のブーム条件を選んだと仮定する。最終ブーム状態入力手段63に含まれるセットキーを操作すると、選択したブーム条件がコントローラ65に出力され、コントローラ65に記憶される。次に伸縮操作レバー61を伸長側に操作し、その操作を継続する限り、以降コントローラ65は伸縮機構を自動制御し、伸縮機構のサイクルを繰り返し上記設定したブーム条件となるまで伸縮動作を続ける。なお、伸縮操作レバー61を中立位置に戻すと、コントローラ65は伸縮機構の動作をその時点で停止させる。
(シリンダ・ブーム連結解除行程)前記伸縮操作レバーの伸長側操作により、コントローラ65は伸縮機構の伸長動作を開始する。まず、コントローラ65は、シリンダ・ブーム間連結解除行程の直前に伸縮シリンダ伸縮制御手段100へ伸縮シリンダ縮小信号を出力する。具体的には、図9に示すコントローラ65から、短時間だけ電磁比例弁102へ信号が出力される。パイロット圧がパイロット式切換弁103へ作用し、縮小側へ切換られることにより伸縮シリンダ1は僅かに縮小する。
【0047】
これにより、シリンダ・ブーム間連結手段20の連結ピン23はセカンドブーム基端部12aの連結穴12bとのガタ分だけ伸縮ブーム基端側へ移動する。すると、セカンドブーム12以降トップブーム16までの重量はすべて前記セカンドブームのブーム間固定手段30の固定ピン12dを経てベースブーム11に伝達されるため、連結ピン23にはブームの重量が負荷されない状態となる。
【0048】
この状態で、コントローラ65はシリンダ・ブーム連結手段20へ連結ピン21の抜き信号を出力する。具体的には、図9のソレノイド切換弁107に対し信号を送り、連結ピン駆動シリンダ21が駆動され連結ピン23が抜き側に動かされる。この時、連結ピン23には荷重が作用していないため、スムーズに抜き動作が行われる。すなわち、図2に示した状態から、前記シリンダ・ブーム連結手段20の連結ピン駆動シリンダ21を伸長すると、前記連結ピン23はセカンドブーム基端部12aの連結穴12bから抜き出される。これにより、伸縮シリンダ1のシリンダチューブロッド側端部3とセカンドブーム基端部12aとの連結が解除される。
(伸縮シリンダ伸長行程)
前記連結ピン状態検出手段110からの信号により、前記シリンダ・ブーム連結手段20と、セカンドブーム基端部12aとの連結解除が確認されると、コントローラ65から伸縮シリンダ制御手段100へ信号が送られ、伸縮シリンダ1はどのブームも駆動することなく単独で伸長動作を開始する。具体的には、図9のコントローラ65から電磁比例弁101に信号が出力され、パイロット式切換弁103にパイロット圧が作用し切換えられ、伸縮シリンダ1が伸長する。
【0049】
さらに、コントローラ65はシリンダ長さ検出手段90の信号に基き、前記シリンダ・ブーム連結手段20の連結ピン23がトップブーム基端部16aの連結穴16bに対し所定の距離まで接近したと判断した時に、前記伸縮シリンダ伸縮制御手段100に対し伸縮シリンダ減速信号を出力する。具体的には、伸縮シリンダ伸長行程中において、既述したシリンダ長さ検出手段90は伸縮シリンダ1の伸長長さ信号をコントローラ65に送り続けており、減速開始点に到達したことをコントローラ65が判断すると、コントローラ65は電磁比例弁101への出力信号値を減少させ始める。パイロット式切換弁103は徐々に中立側へ切換えられ、スプールの開口面積が減少する。前記フロコン弁109の作用も伴ない、伸縮シリンダ1の負荷に関わりなくパイロット式切換弁103を通過する流量が減少するので伸縮シリンダ1の伸長速度が低下していく。減速終了点に達したところでコントローラ65から電磁比例弁101への出力は所定の低い値で一定となる。すなわち、伸縮シリンダ1の伸長速度は低速度を維持する。
【0050】
シリンダ・ブーム連結行程に移行する目標位置は、前記シリンダ長さ検出器90の信号とともに、前記ブーム基端位置検出手段80の信号により判断される。具体的には、図14に示した近接スイッチ86がトップブーム基端部16aに設置した検出片16fを検出することにより、目標位置に到達したことが判断され、次述するシリンダ・ブーム連結行程に移行する。
【0051】
さらに、目的とするトップブーム基端部16aの連結穴16bの位置をシリンダ・ブーム連結手段20の連結ピン23が通過した場合は、前記シリンダ長さ検出手段90の信号に基き、前記コントローラ65は前記伸縮シリンダ制御手段100に対し、伸縮シリンダ反転動作信号を出力する。具体的には、コントローラ65から電磁比例弁102へ信号が出力される。すると、パイロット式切換弁103は今までと反対方向に切換られるため、伸縮シリンダ1は縮小動作を始める。そして、コントローラ65は再度上述したのと同様にシリンダ長さ検出手段90とトップブーム基端位置検出手段80からの信号に基き、シリンダ・ブーム連結動作を試みる。
(シリンダ・ブーム連結行程)
前記コントローラ65から前記シリンダ・ブーム連結手段20に連結信号が出力される。具体的には図9のソレノイド弁107へコントローラ65から信号が出力され、図5に示す前記連結ピン駆動シリンダ21が縮小動作すると、前記連結ピン駆動レバー22が揺動し前記連結ピン23が前記トップブーム基端部16aの連結穴16bへ入る。これにより、伸縮シリンダ1のシリンダチューブ側端部3とトップブーム基端部16aが一体となって連結されたことになる。この時のシリンダ・ブーム連結手段20の状態を図11に示す。
(ブーム間固定解除行程)
コントローラ65は、ブーム間固定解除行程の直前に伸縮シリンダ伸縮制御手段100へ伸縮シリンダ伸長信号を出力する。具体的には、図9に示すコントローラ65から、短時間だけ電磁比例弁101へ信号が出力される。パイロット圧がパイロット式切換弁103へ作用し、伸長側へ切換られることにより伸縮シリンダ1は僅かに伸長する。
【0052】
これにより、図11に示すトップブーム16のブーム間連結手段50の固定ピン16dの先端部53はフィフスブーム15の固定穴51とのガタ分だけ伸縮ブーム先端側へ移動する。すると、トップブーム16の重量はすべて前記シリンダ・ブーム連結手段20の連結ピン23を経て伸縮シリンダ1に伝達されるため、前記固定ピン16dにはトップブーム16の重量が負荷されない状態となる。
【0053】
この状態で、コントローラ65は固定ピン駆動手段40へ固定ピン16dの抜き信号を出力する。具体的には、図9のソレノイド切換弁108対し信号を送り、固定ピン駆動シリンダ41が駆動され、固定ピン16dが抜き側に動かされる。この時、固定ピン16dには上述したように荷重が作用していないため、スムーズに抜き動作が行われる。
【0054】
すなわち、前記固定ピン解除手段40の固定ピン駆動シリンダ41を伸長動作すると、前記固定ピン駆動レバー42が揺動し、当該固定ピン駆動レバー42の一端に位置するローラ44が前記固定ピン16dの内端に位置する連結部材33の開口側37に作用する。すると、ボールロック機構34のボール35は前記固定ピン16dのノッチ36を外れて押し戻され、固定ピン16dの先端部53は前記フィフスブーム15の固定穴51を抜けることになる。これにより、トップブーム16のブーム間固定手段50によるトップブーム基端部16aとフィフスブーム15との固定が解除される。このときの状態を図6及び図6のC−C矢視図である図7に示す。
(ブーム伸縮行程)
前記固定ピン状態検出手段120からの信号により、前記トップブーム基端部16aのブーム間固定手段50の固定ピン16dとフィフスブーム15の固定穴51との固定解除が確認されると、コントローラ65から伸縮シリンダ伸縮制御手段100へ伸長信号が出力され、伸縮シリンダ1はトップブーム16の伸長動作を開始する。具体的には、図9のコントローラ65から電磁比例弁101に信号が出力され、パイロット式切換弁103にパイロット圧が作用し切換えられ、伸縮シリンダ1が伸長することによりトップブーム16を伸長させる。
【0055】
さらに、コントローラ65はシリンダ長さ検出手段90の信号に基き、前記固定ピン駆動手段40が把持する前記固定ピン16dが前記フィフスブーム15の目的とする固定穴54に対し所定の距離まで接近したと判断した時に、前記伸縮シリンダ伸縮制御手段100に対し伸縮シリンダ減速信号を出力する。具体的には、ブーム伸長行程中において、既述したシリンダ長さ検出手段90は伸縮シリンダ1の伸長長さ信号をコントローラ65に送り続けており、減速開始点に到達したことをコントローラ65が判断すると、コントローラ65は電磁比例弁101への出力信号値を減少させ始める。パイロット式切換弁103は徐々に中立側へ切換えられ、スプールの開口面積が減少する。前記フロコン弁109の作用も伴ない、伸縮シリンダ1の負荷に関わりなくパイロット式切換弁103を通過する流量が減少するので伸縮シリンダ1の伸長速度が低下していく。減速終了点に達したところでコントローラ65から電磁比例弁101への出力は所定の低い値で一定となる。すなわち、伸縮シリンダ1の伸長速度は低速度を維持する。そして、コントローラ65が前記固定ピン16dが目的とする固定穴の位置に達したと判断した時に次述するブーム間固定行程に移行する。
【0056】
さらに、目的とするフィフスブーム15の固定穴54の位置を前記固定ピン駆動手段40が把持するトップブーム基端部16aの固定ピン16dが通過した場合は、前記シリンダ長さ検出手段90の信号に基き、前記コントローラ65は前記伸縮シリンダ制御手段100に対し、伸縮シリンダ反転動作信号を出力する。具体的には、コントローラ65から電磁比例弁102へ信号が出力される。すると、パイロット式切換弁103は今までと反対方向に切換られるため、伸縮シリンダ1は縮小動作を始める。そして、コントローラ65は再度上述したのと同様にシリンダ長さ検出手段90の信号に基きブーム間固定動作を試みる。
【0057】
上記ブーム伸縮行程の終了後、ブーム伸縮機構の制御装置のシリンダ長さ検出手段90は、前記目的ブーム伸縮行程における前記伸縮シリンダの伸縮長さを検出する。コントローラ65は当該シリンダ長さ検出手段の検出値に基き、記憶している前記ブーム間固定手段の固定穴の位置により決定される仕様伸縮長さを読み出し、当該仕様伸縮長さを前記目的ブーム伸縮行程における伸縮長さとする。そして、さらにコントローラ65は、前記記憶手段130から読み出した伸縮動作前ブーム状態と前記目的ブーム伸縮行程における伸縮長さとから伸縮動作後ブーム状態を判断する
(ブーム間固定行程)
ブーム伸縮行程の前後におけるブーム・シリンダ連結手段20、ブーム間固定手段50および固定ピン駆動手段40の状態は同じであるので、先に使用した図6と図7を用いて説明する。55はフィフスブーム15の先端部の側面に設けられた固定ボスであって、その内部には固定穴54が設けられている。図9のコントローラ65からソレノイド弁108に信号が出力され、固定ピン駆動手段40の固定ピン駆動シリンダ41が縮小すると、固定ピン16dの先端部53は前記固定穴54に入る。トップブーム基端部16aのブーム間固定手段50のボールロック機構34のボール35は固定ピン16dのノッチ36に入り込み、固定ピン16dはその先端部53を固定穴54に入れた状態で保持される。これにより、トップブーム基端部16aとフィフスブーム15が固定される。このときの伸縮ブーム10の状態は、図8(b)に示す通りである。
【0058】
以降は、既述した各行程を繰り返すことにより、フィフスブーム15を伸長し、図8(c)に示す目的とするブーム条件となると、伸縮機構の制御装置はその動作を終了するのである。
【0059】
【発明の効果】
本願の請求項1の発明によれば、本願発明のブーム伸縮機構の制御装置は、記憶している前記ブーム間固定手段の固定穴の位置により決定される仕様伸縮長さを読み出し、当該仕様伸縮長さを前記目的ブーム伸縮行程における伸縮長さとしているので、ブーム伸縮長さとして誤差を有しない正確な数値を把握することができるのである。
【0060】
請求項2の発明によれば、前記伸縮長さに用いる前記コントローラが記憶する前記仕様伸縮長さを前記ブーム間固定手段の固定ピンと外側ブーム固定穴とのガタ寸法を含まない値としているので、ほぼ現実の伸縮ブームの伸長長さをその数値とすることができるのである。
【0061】
請求項3の発明によれば、前記記憶手段が記憶した各ブーム段の伸長割合からなる伸縮動作前ブーム状態に基き、目的ブーム伸縮行程における伸縮長さとから伸縮動作後の各ブーム段の伸長割合からなる伸縮動作後ブーム状態を判断するので、1本の伸縮シリンダによる伸縮機構を用いた伸縮ブームであって、同じブーム長さに対し各段ブームの伸長割合が異なる伸長状態が設定されていても、伸縮制御および過負荷防止装置によるクレーンの吊り上げ性能の制御が可能となるのである。
【0062】
請求項4の発明によれば、最終ブーム状態入力手段により最終のブーム状態、すなわち最終の各段ブームの伸長割合を入力することができ、また、前記記憶手段は前記最終のブーム状態と伸縮動作後のブーム状態を記憶しているので、前記ブーム伸縮機構の制御装置は前記伸縮動作後のブーム状態が前記最終のブーム状態となるまでその伸縮動作を継続する制御を行うことができるのである。
【0063】
請求項5の発明によれば、ブーム伸縮機構の故障修理等の原因により前記記憶手段が記憶している前記伸縮動作後ブーム状態と現実のブーム状態が一致しなくなった場合でも、前記特定ブーム状態入力手段により現実のブーム状態すなわちその時の各段ブームの伸長割合を入力し、それを前記伸縮動作後ブーム状態として記憶手段に再記憶させることができるのである。
【0064】
請求項6の発明によれば、前記記憶手段を構成するバックアップ電源機構付きメモリ又は不揮発性メモリはたとえ電源が切られてもその記憶内容を保持するので、前記伸縮機構の制御装置は伸縮動作が中断された場合、あるいはクレーン作業が中断されたような場合にあっても、必要な情報を記憶しているので電源が再投入された際にも支障なくブーム伸縮機構の制御を継続することができるのである。
【0065】
請求項7の発明によれば、前記記憶手段が記憶している前記伸縮動作後ブーム長さが何らかの原因で前記第2ブーム長さ検出手段が検出したブーム長さと一致しなくなった場合にコントローラが異常と判断するので、警報あるいは伸縮動作の自動停止等の制御が可能となるのである。
【0066】
請求項8の発明によれば、前記コントローラは前記伸縮動作後ブーム長さを異常と判断したときには、前記第2ブーム長さ検出手段により直接検出したブーム長さに基く故障時吊り上げ性能を移動式クレーンの吊り上げ性能とするので、より安全なクレーン制御が可能となるのである。
【図面の簡単な説明】
【図1】1本の伸縮シリンダによる伸縮機構が使用された6段伸縮ブームの伸縮シリンダに沿った断面図である。
【図2】図1のA−A断面図である。
【図3】図2のB−B矢視図である。
【図4】本発明の実施の形態に係るブーム伸縮機構の制御装置のブロック図である。
【図5】トップブーム、フィフスブームと伸縮機構の関係を示す図である。
【図6】トップブーム基端部のブーム間固定解除された状態を示す図である。
【図7】図6のC−C矢視図である。
【図8】6段伸縮ブームの伸長状態図である。
【図9】伸縮シリンダ伸縮制御手段の具体的な油圧回路図である。
【図10】図2のD−D矢視詳細図である。
【図11】トップブーム基端部におけるシリンダブーム連結状態を示す図である。
【図12】グラフィック表示器による第1の表示画面である。
【図13】グラフィック表示器による第2の表示画面である。
【図14】ブーム基端位置検出手段の具体例である。
【図15】従来のブーム長さ検出器を示した図である。
【符号の説明】
1は伸縮シリンダ、2はシリンダチューブ、3はシリンダチューブロッド側端部、4はロッド、5はロッド端部、7は長さ検出器、8はコード、10は伸縮ブーム、11はベースブーム、12はセカンドブーム、12aはセカンドブーム基端部、12cは連結ボス、12bは連結穴、12eは固定ピン収納部材、12dは固定ピン、12fは検出片、13はサードブーム、14はフォースブーム、15はフィフスブーム、16はトップブーム、20はシリンダ・ブーム連結手段、21は連結ピン駆動シリンダ、22は連結ピン駆動レバー、23は連結ピン、25はトラニオン部材、28はインタロック部材、30はセカンドブームのブーム間固定手段、31は固定ボス、32は固定穴、33は連結部材、34はボールロック機構、35はボール、36はノッチ、38は固定ピン先端部、40は固定ピン駆動手段、41は固定ピン駆動シリンダ、42は固定ピン駆動レバー、46はガイド、47はサポート、50はトップブームのブーム間固定手段、51と54はフィフスブームの固定穴、52と55はフィフスブームの固定ボス、53は固定ピンの先端部、60は伸縮操作手段、61は伸縮操作レバー、62はマニュアル伸縮切換スイッチ、63は最終ブーム状態入力手段、64は特定ブーム状態入力手段、65はコントローラ、70はグラフィック表示器、80はブーム基端位置検出手段、82〜86は近接スイッチ、90はシリンダ長さ検出手段、91はコード、95は長さ検出器、100は伸縮シリンダ伸縮制御手段、101と102は電磁比例弁、103はパイロット式切換弁、104はカウンタバランス弁、109はフロコン弁、107と108はソレノイド切換弁、110は連結ピン状態検出手段、111は検出片、112と113は近接スイッチ、120は固定ピン状態検出手段、121は検出片、122と123は近接スイッチ、130は記憶手段、140は第2ブーム長さ検出手段、150は吊り上げ性能記憶手段
Claims (8)
- ベースブーム内に中間ブームおよびトップブームがそれぞれ伸縮自在に嵌挿されてなる伸縮ブームと、
当該伸縮ブームに内装されて前記ベースブーム基端部にそのロッド端部が軸支されている一本の伸縮シリンダと、
当該伸縮シリンダのシリンダチューブのロッド側端部に配置され、目的とするブームの基端部の連結穴に向けて内蔵する連結ピンを進退することにより選択的にブーム基端部と連結・解除可能なシリンダ・ブーム連結手段と、
隣接するブームの内側ブーム基端部に配置され、外側ブームの適所に設けられた固定穴に向けて内蔵する固定ピンを進退することにより当該隣接するブーム同士を固定・解除可能なブーム間固定手段と、
前記伸縮シリンダのシリンダチューブロッド側端部に配置され、目的とするブーム基端部の前記固定ピンの内端に作用して進退駆動する固定ピン駆動手段と、から構成され、
前記シリンダ・ブーム連結手段により前記伸縮シリンダと目的のブーム基端部を連結するシリンダ・ブーム連結行程と、前記固定ピン駆動手段により前記ブーム間固定手段による目的ブームと外側ブームとの固定を解除するブーム間固定解除行程と、前記伸縮シリンダにより目的ブームを伸縮する目的ブーム伸縮行程と、前記固定ピン駆動手段により前記ブーム間固定手段による目的ブームと外側ブームとを固定するブーム間固定行程と、前記シリンダ・ブーム連結手段による前記伸縮シリンダと目的ブーム基端部との連結を解除するシリンダ・ブーム連結解除行程と、前記伸縮シリンダが次の目的ブーム基端部まで伸縮する伸縮シリンダ伸縮行程と、からなる行程を繰り返すことにより前記伸縮ブームの伸縮を行うブーム伸縮機構の制御装置において、
当該ブーム伸縮機構の制御装置は、前記目的ブーム伸縮行程における前記伸縮シリンダの伸縮長さを検出するシリンダ長さ検出手段と、
当該シリンダ長さ検出手段の検出値に基き、記憶している前記ブーム間固定手段の固定穴の位置により決定される仕様伸縮長さを読み出し、当該仕様伸縮長さを前記目的ブーム伸縮行程における伸縮長さとするコントローラと、から構成されたことを特徴とするブーム伸縮機構の制御装置。 - 請求項1のブーム伸縮機構の制御装置において、
前記コントローラが記憶する前記仕様伸縮長さは、前記ブーム間固定手段の固定ピンと外側ブーム固定穴とのガタ寸法を含まない値とすることを特徴とするブーム伸縮機構の制御装置。 - 請求項1のブーム伸縮機構の制御装置において、
前記ブーム伸縮機構の制御装置は、前記目的ブーム伸縮行程前における伸縮動作前ブーム状態を記憶した記憶手段と、
当該記憶手段から読み出した伸縮動作前ブーム状態と前記目的ブーム伸縮行程における伸縮長さとから伸縮動作後ブーム状態を判断するコントローラと、から構成されていることを特徴とするブーム伸縮機構の制御装置。 - 請求項3のブーム伸縮機構の制御装置において、
前記ブーム伸縮機構の制御装置は、ブーム伸縮動作における最終のブーム状態を入力する最終ブーム状態入力手段と、
当該最終ブーム状態入力手段により入力された最終ブーム状態と前記伸縮動作後ブーム状態とを記憶する記憶手段と、を有することを特徴とするブーム伸縮機構の制御装置。 - 請求項4のブーム伸縮機構の制御装置において、
前記ブーム伸縮機構の制御装置は、特定のブーム状態を入力する特定ブーム状態入力手段と、
当該特定ブーム状態入力手段により入力された特定ブーム状態を前記伸縮動作後ブーム状態として記憶する記憶手段と、を有することを特徴とするブーム伸縮機構の制御装置。 - 請求項3、4または5のブーム伸縮機構の制御装置において、
前記記憶手段は、バックアップ電源機構付きメモリ又は不揮発性メモリであることを特徴とするブーム伸縮機構の制御装置。 - 請求項3のブーム伸縮機構の制御装置において、
前記ブーム伸縮機構の制御装置は、前記伸縮ブームのベースブームとトップブーム間の距離を直接測定することにより測定ブーム長さを求める第2ブーム長さ検出手段と、
前記伸縮動作後ブーム状態におけるブーム長さと前記測定ブーム長さを対比し、そのブーム長さの差が所定値を越えたときに前記記憶手段の記憶している前記伸縮動作後ブーム状態が異常と判断するコントローラと、から構成されていることを特徴とするブーム伸縮機構の制御装置。 - 請求項7のブーム伸縮機構の制御装置において、
前記ブーム伸縮機構の制御装置は、前記伸縮動作後ブーム状態に基く通常時吊り上げ性能と前記測定ブーム長さに基く故障時吊り上げ性能を記憶した吊り上げ性能記憶手段と、
通常は前記通常時吊り上げ性能を前記吊り上げ性能記憶手段から読み出す一方、前記記憶手段の記憶している前記伸縮動作後ブーム状態を異常と判断したときには、前記故障時吊り上げ性能を前記吊り上げ性能記憶手段から読み出すコントローラと、から構成されたことを特徴とするブーム伸縮機構の制御装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2001099280A JP4709409B2 (ja) | 2001-03-30 | 2001-03-30 | ブーム伸縮機構の制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2001099280A JP4709409B2 (ja) | 2001-03-30 | 2001-03-30 | ブーム伸縮機構の制御装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2002293494A JP2002293494A (ja) | 2002-10-09 |
| JP2002293494A5 JP2002293494A5 (ja) | 2008-03-21 |
| JP4709409B2 true JP4709409B2 (ja) | 2011-06-22 |
Family
ID=18952835
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2001099280A Expired - Lifetime JP4709409B2 (ja) | 2001-03-30 | 2001-03-30 | ブーム伸縮機構の制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4709409B2 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN104418249A (zh) * | 2013-08-30 | 2015-03-18 | 株式会社多田野 | 起重机装置的吊臂伸缩机构 |
| KR20230075985A (ko) * | 2021-11-23 | 2023-05-31 | 디와이이노베이트 주식회사 | 길이 센서를 사용하는 크레인 다단붐의 충격 경감장치 |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5586573B2 (ja) * | 2011-12-12 | 2014-09-10 | 株式会社加藤製作所 | クレーンのブーム伸縮装置 |
| WO2014077789A1 (en) * | 2012-11-13 | 2014-05-22 | Hi̇drokon Konya Hi̇droli̇k Maki̇na Sanayi̇ Ve Ti̇caret Li̇mi̇ted Şi̇rketi̇ | A locking mechanism for telescopic booms |
| CN103754768B (zh) * | 2014-01-20 | 2016-03-02 | 安徽柳工起重机有限公司 | 汽车起重机吊臂自由伸缩控制系统 |
| US11117789B2 (en) | 2018-06-04 | 2021-09-14 | Manitowoc Crane Companies, Llc | Telescoping boom with rotary extension and locking system |
| CN113526378B (zh) * | 2021-07-14 | 2023-08-29 | 三一汽车起重机械有限公司 | 起重机臂销孔位参数自动标定方法、计算设备及起重机 |
| CN116871877B (zh) * | 2023-06-30 | 2025-09-19 | 三一汽车起重机械有限公司 | 单缸插销孔位参数修正方法、系统及起重机 |
| CN120841383B (zh) * | 2025-09-22 | 2025-12-05 | 法兰泰克重工股份有限公司 | 一种起重机的控制系统 |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB9326347D0 (en) * | 1993-12-23 | 1994-02-23 | Grove Europ Limited | Improvements in and relating to telescopic booms |
| JP3263217B2 (ja) * | 1993-12-27 | 2002-03-04 | 株式会社タダノ | 作業機の作動制御装置 |
| JP4076191B2 (ja) * | 1998-04-27 | 2008-04-16 | 株式会社タダノ | 移動式クレーンのブーム伸縮機構 |
| JP4263280B2 (ja) * | 1998-11-24 | 2009-05-13 | 株式会社タダノ | 移動式クレーンのブーム伸縮機構 |
-
2001
- 2001-03-30 JP JP2001099280A patent/JP4709409B2/ja not_active Expired - Lifetime
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN104418249A (zh) * | 2013-08-30 | 2015-03-18 | 株式会社多田野 | 起重机装置的吊臂伸缩机构 |
| KR20230075985A (ko) * | 2021-11-23 | 2023-05-31 | 디와이이노베이트 주식회사 | 길이 센서를 사용하는 크레인 다단붐의 충격 경감장치 |
| KR102703685B1 (ko) * | 2021-11-23 | 2024-09-06 | 디와이이노베이트 주식회사 | 길이 센서를 사용하는 크레인 다단붐의 충격 경감장치 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2002293494A (ja) | 2002-10-09 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4709409B2 (ja) | ブーム伸縮機構の制御装置 | |
| JP5586573B2 (ja) | クレーンのブーム伸縮装置 | |
| CN108698806B (zh) | 伸缩机构 | |
| JP5882977B2 (ja) | クレーンのブーム伸縮装置 | |
| JP4709415B2 (ja) | 伸縮機構の制御装置 | |
| JP4901010B2 (ja) | ブーム伸縮機構の制御装置 | |
| JP4709431B2 (ja) | 伸縮機構 | |
| JP4287667B2 (ja) | ブーム伸縮機構の制御装置 | |
| JP4865956B2 (ja) | 伸縮機構の制御装置 | |
| JP6753337B2 (ja) | クレーンの情報提示システム及びクレーン | |
| JP2011157220A (ja) | ブーム伸縮機構の制御装置 | |
| JPWO2007052339A1 (ja) | クレーンのブーム伸縮装置 | |
| JP4040856B2 (ja) | 伸縮ブームの伸縮制御装置 | |
| JP2017154875A (ja) | 伸縮機構 | |
| JP2010235225A (ja) | クレーンの操作装置及びクレーン | |
| JP4153695B2 (ja) | 伸縮ブームの伸縮制御装置 | |
| US12208999B2 (en) | Locking head assembly for crane boom pins, boom with such an assembly and crane with such a boom | |
| JP2011178568A (ja) | ブーム伸縮機構の制御装置 | |
| US20220227608A1 (en) | Expansion device and crane | |
| JP4966081B2 (ja) | 作業機の作動油量制御装置 | |
| JP3928793B2 (ja) | 油圧アクチュエータの制御装置 | |
| JP2019052022A (ja) | 伸縮機構 | |
| JP4707872B2 (ja) | 油圧アクチュエータの制御装置 | |
| EP4253304A1 (en) | Work machine | |
| JP2023020118A (ja) | 建設機械のブーム制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20080131 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20080131 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20110128 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20110222 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20110318 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4709409 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |