図1は、本発明の実施の第1形態である電動機駆動制御システム20を示すブロック図である。本実施の形態では、電動機駆動制御システム20は、同期電動機21を用いて電車車両を換気する換気装置に用いられる。この場合、車両がセクションを通過するときには車両に電力が供給されず、制御システム20は、瞬時停電状態となる。そしてセクション通過後には、制御システム20は、再び電力が供給され、同期電動機の回転制御を再開する。このとき制御システム20は、同期電動機の回転子が回転した状態で、同期電動機の回転制御を開始することになる。
制御システム20は、同期電動機21の回転子の磁極の角速度および角度位置を推定して、推定した磁極の角速度および角度位置に基づいて、回転子が所望の角速度で回転するように、同期電動機21に与える交流電圧を調整する。
電動機駆動制御システム20は、同期電動機21と、PWMインバータ回路22と、直流回路部23と、制御装置24とを含んで構成される。同期電動機21は、3相同期モータであり、回転子の角速度を検出するための角度センサが存在せずに、センサレスに構成される。たとえば、同期電動機21として円筒形ブラシレスDCモータが用いられる。直流回路部23は、予め定める直流電力を生成する回路であり、電圧センサ29が設けられる。電圧センサ29は、直流回路部23からインバータ回路22に印加される電圧を示す直流母線電圧信号を制御装置24に与える。
図2は、PWMインバータ回路22の回路構成の一例を示す図である。PWM(Pulse
Width Modulation、パルス幅変調)インバータ回路22は、たとえば三相のブリッジ回路によって実現される。インバータ回路22は、直流回路部23から与えられる直流電力を、3相の交流電力に変換して同期電動機21に与える。インバータ回路22は、3つの出力端子25a,25b,25cを有し、それらが接続経路27a,27b,27cを介して、同期電動機21の3つの端子26a,26b,26cにそれぞれ接続される。
インバータ回路22は、交流電流を各接続経路27a〜27cにそれぞれ流すための複数のスイッチング素子Trが設けられる。スイッチング素子Trは、制御装置24からゲート信号が与えられることによって、オンオフ状態が切換る。スイッチング素子Trは、オン状態でスイッチング素子Trの両端の端子間を導通状態とし、オフ状態でスイッチング素子Trの両端の端子間を遮断状態とする。本実施の形態では、各スイッチング素子Trは、トランジスタによって実現される。各スイッチング素子Trには、逆並列にダイオードDがそれぞれ接続される。
制御装置24は、パルス幅変調したゲート信号を各スイッチング素子Trに与えることによって、120度ずつ位相がずれた正弦波形の交流電流を各接続経路27a〜27cに流すことができる。このような交流電流を各接続経路27a〜27cに流すことによって、同期電動機21の回転子を回転駆動する。制御装置24は、ゲート信号を調整することで同期電動機21の回転子の速度を変更することができる。
インバータ回路22と同期電動機21とを接続する3つの接続経路27a〜27cのうちの2つの接続経路27a,27cには、電流センサ28a,28cが介在される。第1の電流センサ28aは、3つのうち1つの接続経路27aを流れる電流を実測し、実測値を第1電流センサ信号として制御装置24に与える。第2の電流センサ28cは、3つのうち他の1つの接続経路27cを流れる電流を実測し、実測値を第2電流センサ信号として制御装置24に与える。このように各電流センサ28a,28cは、インバータ回路22から同期電動機21に流れる電流を実測し、実測した実測値を電流センサ信号として制御装置24に与える。
制御装置24は、電圧センサ29から与えられる直流母線電圧センサ信号と、電流センサ28から与えられる各電流センサ信号とを取得する。制御装置24は、取得した電流センサ信号に基づいて、同期電動機21を流れる電流実測値を判断する。また制御装置24は、制御装置24を駆動するための電源装置からの電源供給が停止したあとに電源供給が開始されると、セクション通過を判断し、回転子の磁極の角速度および角度位置の推定開始を判断する。このほか、他の装置から制御開始指令に基づいて、推定開始のタイミングを判断してもよい。
制御装置24は、同期電動機21を流れる電流実測値に基づいて、同期電動機21の回転子の磁極の角速度と角度位置とを推定する推定部と、推定部によって推定された磁極の角速度と角度位置とに基づいて、磁極の角速度が予め定められる角速度となるように、インバータ回路22の各スイッチング素子Trにゲート信号をそれぞれ与える制御部とを有する。
制御部は、推定部による磁極の角速度と角度位置との推定を開始してから予め定める条件が成立するまでの粗推定期間と、推定部による推定を開始してから予め定める条件が成立した後の通常推定期間とを判断する。本実施の形態では、制御部は、推定部による推定を開始してから予め定める時間が経過するまで粗推定期間として判断し、予め定める時間が経過した後、通常推定期間の開始を判断する。また本実施の形態では、制御部は、通常推定期間において、推定部の推定結果に基づいて、インバータ回路22を介して同期電動機21を制御する。
また粗推定期間は、推定を開始した直後の初期期間を含む。制御部は、粗推定期間におけるデッドタイムdnが、通常推定期間におけるデッドタイムdwよりも広く、すなわち長くなるように、インバータ回路22の各スイッチング素子Trにゲート信号を与える。ここで、デッドタイムdとは、インバータ回路22に含まれるスイッチング素子Trのうち、交流変換に寄与するスイッチング素子Trが全てオフ状態となる期間であり、直列に接続されるスイッチング素子Trがともにオフとなる期間である。
以下、理解を容易にするために、インバータ回路22を単相のフルブリッジ回路22Aとして説明する。図3は、インバータ回路22の一部を、単相のフルブリッジ回路22Aとして示す回路図である。フルブリッジ回路22Aは、直流回路部23からの直流電圧が印加される2つの入力端子41,42に並列に接続される第1入力経路43と第2入力経路44とが形成される。第1入力経路43および第2入力経路44には、2つのスイッチング素子Tr1U,Tr1L;Tr2U,Tr2Lが直列に並んでそれぞれ介在される。また第1入力経路43の2つのスイッチング素子Tr1U,Tr1Lの間の経路部分90が第1出力経路92を介して第1出力端子25aに連なり、第2入力経路44の2つのスイッチング素子Tr2U,Tr2Lの間の経路部分91が第2出力経路93を介して第2出力端子25bに連なる。
第1出力端子25aと第2出力端子25bとは、連結経路46によって連結される。連結経路46は、抵抗RおよびインダクタLが直列に接続される。この連結経路46は、同期電動機21の3つの端子26a〜26cのうちの2つの端子間を結ぶ経路に相当する。したがって同期電動機21の回転子が回転することで、連結経路46には、誘起電圧Emが発生する。
2つの入力端子41,42のうち、直流回路部23から印加される電圧に起因して、電位が高いほうの入力端子を第1入力端子41とし、電位が低いほうの入力端子を第2入力端子42とする。各スイッチング素子Trは、オン状態では、各入力経路43,44を第1入力端子41側から第2入力端子42側に電流が流れることを許容する。また各スイッチング素子Trに逆並列にそれぞれ接続される各ダイオードDは、第2入力端子42側から第1入力端子41側に電流が流れることを許容する。
第1入力経路43の2つのスイッチング素子Tr1U,Tr1Lのうちの第1入力端子41寄りとなるスイッチング素子をTr1Uとし、第2入力端子42寄りとなるスイッチング素子をTr1Lとする。また第2入力経路44の2つのスイッチング素子Tr2U,Tr2Lのうちの第1入力端子41寄りとなるスイッチング素子をTr2Uとし、第2入力端子42寄りとなるスイッチング素子をTr2Lとする。
制御装置24が、Tr1UとTr2Lとをオン状態とし、Tr2UとTr1Lとをオフ状態とすることによって、連結経路46を電流が、図3の矢符に示す第1方向に流れる。また制御装置24が、Tr1UとTr2Lとをオフ状態とし、Tr2UとTr1Lとをオン状態とすることによって、連結経路46を電流が、第1方向と反対となる第2方向に流れる。このように制御装置24が各スッチング素子Trのオンオフ状態を切換えて、連結経路46を流れる電流の方向を交互に切換えることで、交流電流を連結経路46に流すことができる。この場合、デッドタイムdは、Tr1Uと、Tr1Lと、Tr2Uと、Tr2Lとが全てオフ状態となる期間を意味する。
図4は、通常推定期間における各スイッチング素子Trのオンオフ状態を示すタイミングチャートである。
直列に接続される2つのスイッチング素子Trが同時にオン状態となると、直流電源部23が短絡して非常に大きな電流が流れ、スイッチング素子Trが破壊するおそれがある。このような状態を避けるために、通常推定期間において、直列に接続される2つのスイッチング素子Tr1U,Tr1L;Tr2U,Tr2Lが同時にオン状態にならないようにしたうえで、可及的に狭くなるようにデッドタイムdnが設定される。このようなデッドタイムdnは、スイッチング素子Trの性能に起因して決定される。
具体的には、図4に示すように、各スイッチング素子Trは、交流電流を流すために、PWMキャリア周期W0ごとに切換動作を繰返す。PWMキャリア周期W0のうちで、Tr1UおよびTr2Lがともにオン状態となる第1オン期間W1と、Tr2UおよびTr1Lがともにオン状態となる第2オン期間W2とがそれぞれ設定される。そして第1オン期間W1が終了してから第2オン期間W2が開始するまでの期間dn1と、第2オン期間W2が終了してから第1オン期間W1が開始するまでの期間dn2とがそれぞれデッドタイムdnとなる。たとえばPWMキャリア周波数が8kHz、すなわちPWMキャリア周期W0が125μ秒の場合、通常推定期間におけるデッドタイムdn1,dn2は、たとえば5μ秒に設定される。
このような通常推定期間における各スイッチング素子Trのオンオフ状態は、一例である。したがって上述する各スイッチング素子Trのオンオフ状態とは異なるオンオフ状態が、通常推定期間に行われてもよい。たとえば後述する粗推定期間のように通常推定期間においても、Tr1UおよびTr2Uがオン状態となる期間W11と、Tr1LおよびTr2Lがオン状態となる期間W12とを設定することに対応して、Tr1UおよびTr1Lが一対、Tr2UおよびTr2Lが一対となってオンオフ状態が切換る場合もある。
図5は、粗推定期間における各スイッチング素子Trのオンオフ状態を示すタイミングチャートである。本実施の形態では、粗推定期間におけるデッドタイムdwが、通常推定期間におけるデッドタイムdnよりも広く設定される。
具体的には、図5に示すように、各スイッチング素子Trは、PWMキャリア周期W0ごとに切換動作を繰返す。PWMキャリア周期W0のうちで、Tr1UおよびTr2Uがともにオン状態となる第1オン期間W11と、Tr1LおよびTr2Lがともにオン状態となる第2オン期間W12とがそれぞれ設定される。そして第1オン期間W11が終了してから第2オン期間W12が開始するまでの期間dw1と、第2オン期間W12が終了してから第1オン期間W11が開始するまでの期間dw2とが、それぞれデッドタイムdwとなる。たとえば粗推定期間におけるデッドタイムdwは、PWM周期の1/2未満に設定され、一例としてPWMキャリア周波数が8kHz、すなわちPWMキャリア周期W0が125μ秒の場合、粗推定期間におけるデッドタイムdw1,dw2は、たとえば57μ秒に設定される。
このように制御装置24は、インバータ回路22Aに与えるゲート信号を調整して、粗推定期間におけるデッドタイムdwを、通常推定期間におけるデッドタイムdnよりも広くする。言い換えると、制御装置24は、粗推定期間のうちの各オン期間W11,W12の合計期間(W11+W12)を、通常推定期間のうちの各オン期間W1,W2の合計期間(W1+W2)よりも狭くする。これによって粗推定期間では、同期電動機21から見た電源インピーダンスが等価的に高くなり、連結経路46に流れる電流を少なくすることができる。このことは、3相のブリッジ回路22であって、同期電動機21のインバータ回路22にも適用することができる。
このようにして粗推定期間に同期電動機21に流れる電流を少なくすることによって、粗推定期間での磁極の角速度と角度位置との推定が正確でなくとも、インバータ回路22に生じる過電流を抑制することができる。また通常推定期間では、粗推定期間での推定値を用いて、磁極の角速度と角度位置との推定を行う。これによって推定精度が高くなっているので、通常推定期間におけるデッドタイムdnを狭めてインバータ回路22から同期電動機21に流れうる電流が大きくなっても、インバータ回路22に過電流が生じることを防ぐことができる。また初期期間からの推定結果を利用して通常推定期間での推定精度を高めて、その推定結果に基づいてインバータ回路22を制御することで、同期電動機21に与える電流が小さくても、同期電動機21が発生可能なトルクを大きくすることができる。すなわち効率よくトルクを発生させることができる。
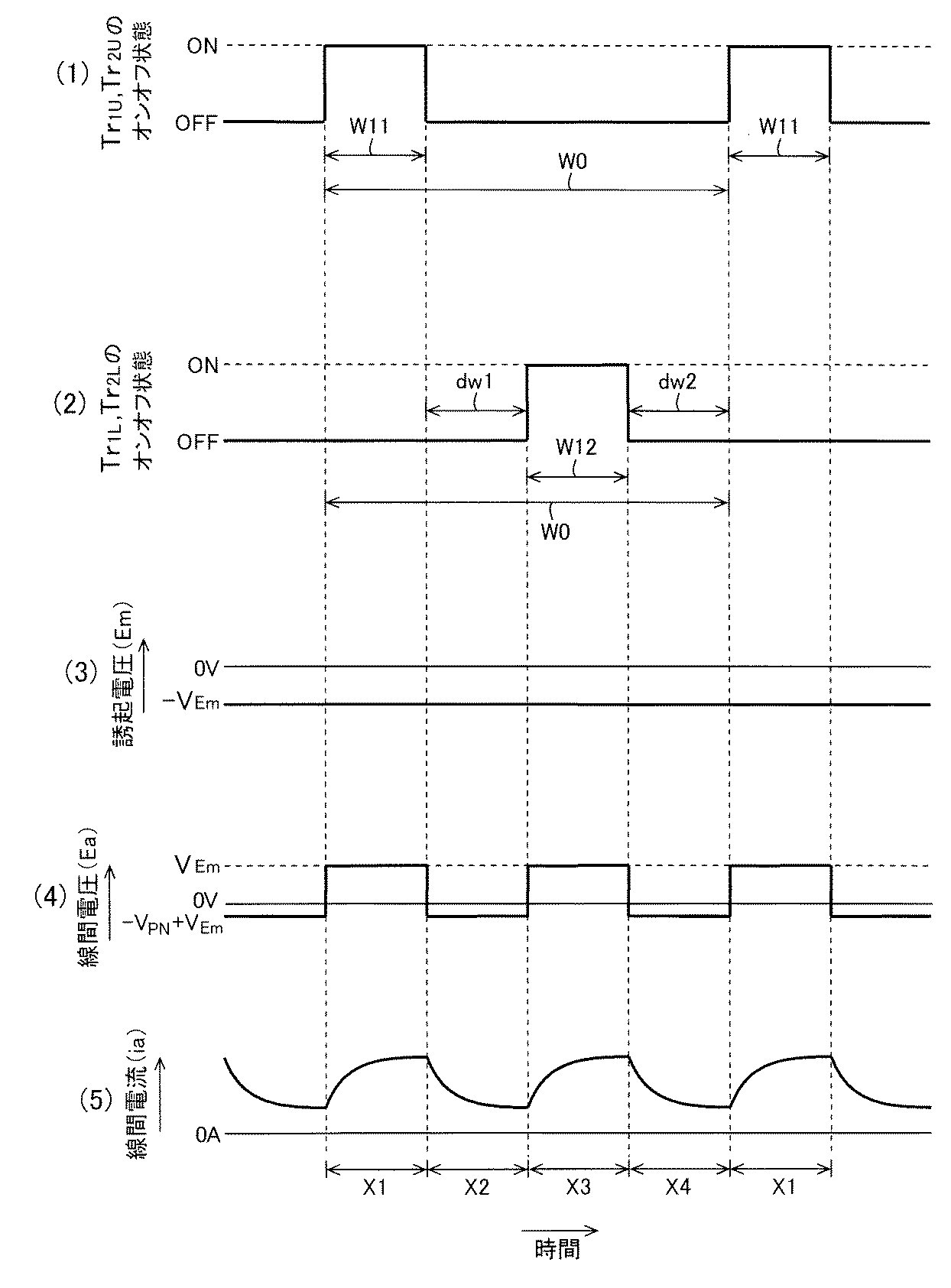
図6は、粗推定期間におけるスイッチング素子Trのオンオフ状態、誘起電圧Em、線間電圧Eaおよび線間電流iaの時間変化を示すタイミングチャートである。誘起電圧Emは、同期電動機21の回転子の角変位によって発生する電圧である。線間電圧Eaは、インバータ回路22Aにおいて、2つの出力端子25a,25bの間の電圧である。線間電流iaは、連結経路46を流れる電流であって、電流センサ28aによって検出可能である。線間電流iaは、電流が連結経路46を図3の矢符に示す第1方向に流れる場合を、正の値とする。また誘起電圧Emは、デッドタイムdwにおいて、電流が、図3の矢符に示す第1方向とは反対の第2方向に連結経路46を流れる場合を、正の値とする。
図6において、スイッチング素子TrおよびダイオードDによる電圧効果がゼロであると仮定する。またPWMキャリア周期W0が極めて短いので、1つのPWMキャリア周期W0の間における誘起電圧Emが一定であると仮定する。また図6には、誘起電圧Emが負の値である場合を示す。この場合、線間電流iaは、デッドタイムdwにおいて連結経路46を図3の矢符に示す第1方向に流れる。
本実施の形態では、制御装置24は、粗推定期間において、1つのPWMキャリア周期W0あたりにTr1U,Tr2Uがオン状態となり、かつTr1L,Tr2Lがオフ状態となる第1オン期間W11と、Tr1U,Tr2Uがオフ状態となり、かつTr1L,Tr2Lがオン状態となる第2オン期間W12との大きさが一致するようにゲート信号を調整する。言い換えると、インバータ回路22のPWM変調率をゼロに調整する。また第1オン期間W11が終了してから第2オン期間W12が開始するまでの期間である第1デッドタイムdw1と、第2オン期間W12が終了してから第1オン期間W11が開始するまでの期間である第2デッドタイムdw2との大きさが一致するようにゲート信号を調整する。
各オン期間W11,W12における線間電圧Eaの値は、誘起電圧Emの正負が反転した値と等しくなる。したがって誘起電圧Emの値を−VEmとすると、オン期間W11,W12の線間電圧Eaの値は、VEMとなる。また連結経路46にインダクタLが設けられ、インバータ回路22にダイオードDが設けられるので、各デッドタイムdw1,dw2における線間電圧Eaの値は、インバータ回路22の2つの入力端子41,42間の電圧である電源電圧Eの値VPNの正負が反転した値(−VPN)と、誘起電圧Emの正負が反転した値(VEm)とを加算した値(−VPN+VEm)となる。
このように線間電圧Eaは、誘起電圧Emと、電源電圧Eと、スイッチング素子Trのオンオフ状態によってその電圧値が決定される。また線間電流iaは、線間電圧Eaによって、その電流値が決定される。
線間電流iaは、線間経路46に抵抗RおよびインダクタLが存在するので、4つの状態X1〜X4を繰返す。まず第1オン期間W11で、第1状態X1として連結経路46を第1方向に流れる電流が増加して、線間電流iaが時間経過とともに増加する。次に第1デッドタイムdw1で、第2状態X2として連結経路46を第1方向に流れる電流が減少して、線間電流iaが時間経過とともに減少する。
次に、第2オン期間W12で、第3状態X3として連結経路46を第1方向に流れる電流が増加して、線間電流iaが時間経過とともに増加する。次に第2デッドタイムdw2で、第4状態X4として連結経路46を第1方向に流れる線間電流iaが減少して、線間電流iaが時間経過とともに減少する。表1に各状態X1〜X4におけるスイッチング素子Trと線間電流iaの状態とをそれぞれ示す。表1において、線間電流iaの増加とは、第1方向に流れる電流の増加を意味し、電流の減少とは、第1方向に流れる電流の減少を意味する。
線間電流iaは、スイッチング素子Trの各オン期間W11,W12が短ければ、線間電流iaが小さくなる。言い換えると、線間電流iaは、スイッチング素子Trのデッドタイムdw1,dw2が長ければ、線間電流iaが小さくなる。また線間電圧Eaは、誘起電圧Emに対応して変化するので、線間電圧Eaに対応して変化する線間電流iaも、誘起電圧Emに対応して変化する。
本実施の形態では、デッドタイムdwなどの設定可能な設定値が適切に設定されることで、誘起電圧Emの値(−VEm)が負の値である場合、線間電流iaの平均電流値が、誘起電圧Emの値の大きさに対応した正の値を維持するように調整される。また誘起電圧Emの値(VEm)が正の値である場合、線間電流iaの平均電流値が、誘起電圧Emの値の大きさに対応した負の値を維持するように調整される。
このように線間電流iaと誘起電圧Emとは一対一の関係を有するので、線間電流iaを実測することによって、誘起電圧Emを求めることができる。具体的には、線間電流iaの値をIaとし、誘起電圧Emの値をEmとすると、誘起電圧Emの値は、以下に示す関係式を満たす。
Em=f(Ia) …(1)
なお、(1)式において、f(Ia)は、線間電流iaの値の関数である。この関数は、実験によって求まる近似式や理論式などによって予め求めることができる。このような(1)式に従うことによって、線間電流iaから誘起電圧Emを求めることができる。
さらに誘起電圧Emと磁極の角速度ωとは、以下に示す関係式を満たすので、誘起電圧Emから磁極の角速度ωを推定することができる。
Em=Ke・ω …(2)
なお、(2)式において、Emは誘起電圧を、ωは磁極の角速度を、Keは定数を表わす。また、(2)式によって求められる磁極の角速度ωを積分することによって磁極の角度位置を推定することができる。
図7は、粗推定期間におけるスイッチング素子Trのオンオフ状態、誘起電圧Em、線間電圧Eaおよび線間電流iaの時間変化を示すタイミングチャートである。図7は、図6に示す場合に比べて誘起電圧Emが正の値VEmとなる。この場合、線間電流iaは、負の値となる。すなわちデッドタイムdwにおいて、電流は、連結経路46を第2方向に流れる。
この場合、各オン期間W11,W12における線間電圧Eaの値は、誘起電圧Emの正負が反転した値と等しくなる。したがって誘起電圧Emの値をVEmとすると、オン期間W11,W12の線間電圧Eaの値は、−VEMとなる。また各デッドタイムdw1,dw2における線間電圧Eaの値は、電源電圧Eの値VPNと、誘起電圧Emの正負が反転した値(−VEm)とを加算した値(VPN−VEm)となる。この場合のスイッチング素子Trと線間電流iaの状態とを表2に示す。表2において電流の増加とは、第2方向に流れる電流の増加を意味し、電流の減少とは、第2方向に流れる電流の減少を意味する。
このように、誘起電圧Emの正負にかかわらずに、上述した(1)式および(2)式を用いることによって、線間電流iaから磁極の角速度ωを求めることができる。また線間電流iaがゼロの場合には、線間電圧Eaもゼロとなる。
また本実施の形態では、誘起電圧Emが正の値VEmの場合には線間電流iaが負の値に維持され、誘起電圧Emが負の値(−VEm)の場合には線間電流iaが正の値に維持されるように、デッドタイムdwが設定されることによって、誘起電圧Emを容易にかつ精度よく求めることができる。
図8は、デッドタイムdnが狭い場合におけるスイッチング素子Trのオンオフ状態、誘起電圧Em、線間電圧Eaおよび線間電流iaの時間変化を示すタイミングチャートである。比較例として図8に示すように、各デッドタイムdn1,dn2が狭い場合には、スイッチング素子がオン状態となる期間W1,W2が長くなるので、線間電流iaが大きくなる。この場合、線間電流Iaが、予め設定される許容電流の値Imaxを超えてしまうおそれがある。
これに対して、本実施の形態では、図6、図7に示すように、デッドタイムdwを広くすることによって、磁極の角速度、ひいては誘起電圧Emの推定が正確でなくとも、線間電流iaが過電流になることを防ぐことができ、インバータ回路22および同期電動機21が損傷することを防ぐことができる。
なお、粗推定期間を終えて通常推定期間に移行すると、精度良く磁極の角速度および角度位置を推定することができているので、誘起電圧Emに基づいたインバータ電圧を与えることができる。したがって通常推定期間において、デッドタイムdを狭くしても、線間電圧Eaが大きくなることを防ぐことができ、線間電流iaが過電流になることを防ぐことができる。また粗推定期間からの推定結果を利用することによって、通常推定期間での推定精度を高めて、その推定結果に基づいてインバータ回路22を制御することで、同期電動機21に与える電流が小さくても、同期電動機21が発生可能なトルクを大きくすることができる。すなわち同期電動機21のトルクを効率よく発生させることができる。またこのような効果は、インバータ回路の回路構成にかかわずに達成することができる。したがって図2に示す三相のブリッジ回路22であっても、同様の効果を得ることができる。またスイッチング素子Trのオンオフ状態は、他に選択が可能である。
図9は、第1実施形態の変形例での粗推定期間におけるスイッチング素子Trのオンオフ状態および線間電流iaの時間変化を示すタイミングチャートである。この変形例でも、スイッチング素子TrおよびダイオードDによる電圧効果がゼロであると仮定する。また1つのPWMキャリア周期W0の間における誘起電圧Emが一定であると仮定する。
本実施の形態では、1つのPWMキャリア周期W0あたりにTr1U,Tr2Lがオン状態となり、かつTr1L,Tr2Uがオフ状態となる第1オン期間W21と、Tr1U,Tr2Lがオフ状態となり、かつTr1L,Tr2Uがオン状態となる第2オン期間W22との大きさが一致するようにゲート信号を調整する。すなわちインバータ回路22のPWM変調率をゼロに調整する。
また第1オン期間W11が終了してから第2オン期間W12が開始するまでの期間である第1デッドタイムdw11と、第2オン期間W12が終了してから第1オン期間W11が開始するまでの期間である第2デッドタイムdw12との大きさが一致するようにゲート信号を調整する。
本実施の形態でも、粗推定期間のうちの定常状態において、誘起電圧Emが正の値の場合には線間電流iaが負の値に維持され、誘起電圧Emが負の値の場合には線間電流iaが正の値に維持されるように、デッドタイムdwが設定される。
図9(3)に示すように、誘起電圧Emが負の値(VEm<0)の場合、線間電流iaは、まず第1オン期間W11で、第1状態X11として線間電流iaが時間経過とともに増加する。次に第1デッドタイムdw21および第2オン期間w21で、第2状態X12として線間電流iaが時間経過とともに減少する。第2状態X12では、時間が経過するとともに、線間電流iaは、一定値に近づく。そして線間電流iaは、第1状態X11と第2状態X12とを順番に繰返し、正の値を維持する。ここで、線間電流iaの増加とは、第1方向に流れる電流の増加を意味し、電流の減少とは、第1方向に流れる電流の減少を意味する。
また図9(4)に示すように、誘起電圧Emが正の値(VEm>0)の場合、線間電流iaは、まず第1オン期間W11および第1デッドタイムdw11で、第1状態X21として線間電流iaが時間経過とともに減少する。第1状態X21では、時間が経過するとともに、線間電流iaは、一定値に近づく。次に第2オン期間w21で、第2状態X22として線間電流iaが時間経過とともに増加する。次に第2デッドタイムdw12で、第3状態X23として線間電流iaが時間経過とともに減少する。そして線間電流iaは、第1状態X21〜第3状態X23を順番に繰返し、負の値を維持する。ここで、線間電流iaの増加とは、第2方向に流れる電流の増加を意味し、電流の減少とは、第2方向に流れる電流の減少を意味する。
このような変形例に示すスイッチング素子Trのオンオフ状態であっても、前述した方法と同様にして、線間電流iaから磁極の角速度ωを推定することができる。また通常推定期間に比べて、各デッドタイムdw11,dw12を広げることで、線間電流iaが過電流になることを防ぐことができ、インバータ回路22および同期電動機21が損傷することを防ぐことができる。
また初期期間からの推定結果を利用することによって、通常推定期間での推定精度を高めることができ、同期電動機21に与える電流が小さくても、同期電動機21が発生可能なトルクを大きくすることができる。すなわち同期電動機21のトルクを効率よく発生させることができる。なお、図6〜図9では、電流の流れる方向が誘起電圧の正負に応じて一定に維持されるとしたがこれに限定されない。
図10は、デッドタイムdと誘起電圧Emと線間電流iaとの関係を示すグラフである。インバータ回路22から同期電動機21に出力される平均出力電圧が予め定められる値である場合、デッドタイムdと誘起電圧Emと線間電流iaとは、相対関係がある。具体的には、デッドタイムdが一定の場合には、誘起電圧Emが大きくなるとともに線間電流iaが大きくなる。また誘起電圧Emが一定の場合には、デッドタイムdが広くなるとともに線間電流iaが小さくなる。
したがってデッドタイムdを広くすることによって、線間電流iaを抑えることができるが、デッドタイムdを過度に広くすると誘起電圧Emの値が大きいときに線間電流iaを流すことができず、磁極の角速度を測定することができない。またデッドタイムdを狭くすると、誘起電圧Emの値が大きいときに線間電流iaが過電流となる。
したがって誘起電圧Emの発生可能範囲が予め予想可能な場合には、その予想に基づいてデッドタイムdを決定することによって、線間電流iaが過電流となることを防いで、磁極の角速度を測定することができる。たとえば同期電動機21の発生誘起電圧範囲が既知である場合、その発生可能範囲において適切なデッドタイムdを粗推定期間におけるデッドタイムdwとしてもよい。また制御装置24は、フライング制御開始前の実測値または推測値から、粗推定時における誘起電圧Emの発生可能範囲を求められる場合、求めた発生可能範囲に基づいて、図10に示すような関係に従って、線間電流iaが過電流となることを防いで磁極の角速度を測定可能なデッドタイムdwを決定してもよい。
たとえば図10に示すような関係が成り立ち、線間電流iaの絶対値が30Aを超えると過電流となる場合、粗推定時における誘起電圧Emが52〜60Vの範囲で発生することが予想されると、制御装置24は、デッドタイムdを30μ秒(3×10−5秒)に設定する。これによって、線間電流iaの電流値を−30Aを超えて0A未満にすることができ、磁極の角速度を測定可能でかつ過電流となることを防ぐことができる。
また本発明の第1実施形態では、粗推定期間におけるデッドタイムdwが一定値であるとしたが、より確実に過電流を防ぐために、第2の実施形態として、粗推定期間におけるデッドタイムdwを可変とし、連結経路46から目的とする電流が流れるように、デッドタイムdwを変化させてもよい。以下に第2の実施形態について説明する。
第2の実施形態では、粗推定期間におけるデッドタイムdwの初期値を、通常推定期間におけるデッドタイムdnよりも広く設定する。たとえばフィールドプログラマブルゲートアレイ(Field Programmable Gate Array、FPGA)を用いることによって、粗推定期間中にデッドタイムを変化させることができる。FPGAを用いてデッドタイムdを可変にすることによって、ハードウェアによるデットタイムdの変更を可能とすることができる。これによってソフトウェアによってデッドタイムを変更する場合に比べて、制御装置24の安定性を向上することができる。
図11は、デッドタイムdを可変とした場合を説明するためのグラフである。インバータ回路22から同期電動機21に出力される平均出力電圧が予め定められる値である場合、デッドタイムdと誘起電圧Emと線間電流iaとは、相関関係がある。具体的には、線間電流iaの電流値が予め定める値となるときに、デッドタイムdと誘起電圧Emとが比例関係となる。
図11に示すように線間電流iaの電流値がゼロとなる場合には、誘起電圧をEmとし、デッドタイムをdとすると、以下に示す関係式を満たす。
Em=K1・d …(3)
なお、(3)式において、K1は、予め定められる定数であり、図11では、1.7×106[V/秒]に設定される。これによってある任意の時点での誘起電圧Emが、その時点のデッドタイムdのK1倍よりも大きければ線間電流iaが流れ、デッドタイムdのK1倍よりも小さければ線間電流iaが流れない。
線間電流iaが流れないと測定することができないので、粗推定期間では、過電流となることがない線間電流iaが流れるようにした状態で、粗推定を行う。本実施の形態では、線間電流iaの電流値が予め定める設定電流値となるようにして粗推定を行う。図11に示すように線間電流iaの電流値が設定電流値となる場合には、以下に示す関係を満たす。
Em=K1・d+K2 …(4)
なお、(4)式において、K2は、予め定められる定数である。図11において設定電流値が−30Aである場合には、K2は、10[V]に設定される。
本実施の形態では、粗推定期間の最初の期間におけるデッドタイムを初期デッドタイムd0として設定し、初期デッドタイムd0から予め定める設定電流値の線間電流iaが流れるまで、デッドタイムdを徐々に狭くする。なお、初期デッドタイムd0は、想定される最大の誘起電圧Emが発生しても過電流が発生せず、PWM周期の1/2以下に設定され、たとえば5×10−5秒(50μ秒)として設定される。また、初期デッドタイムd0は、少なくとも通常推定期間におけるデッドタイムdwよりは広く設定される。また、設定電流値は、0を超えて許容電流値範囲内に設定され、たとえば絶対値として30Aとして設定される。
実際の誘起電圧Emが50Vである場合、図11に示すように、デッドタイムdを初期デッドタイムd0となる5×10−5秒から徐々に狭くし、約2.9×10−5秒まで狭くすると電流が流れはじめ、約2.3×10−5秒となると線間電流iaの電流値が−30Aとなる。このようにして線間電流iaの電流値が−30Aとなる時のデッドタイムが求まると、(4)式に、そのデッドタイムdを代入することで、誘起電圧Emが50Vであると推定することができる。また推定した誘起電圧Emに基づいて、磁極の角速度と角度位置とを求めることができる。
なお、誘起電圧Emが正の場合について説明したが、誘起電圧Emが負の場合についてのグラフは、図11のグラフをY軸に線対称に配置したグラフとなり、以下に示す関係を満たす。
−Em=−K1・d−K2 …(5)
本実施の形態では、粗推定期間においてデッドタイムを徐々に変化させるにあたって、制御装置24が、線間電流iaの電流値に基づいて、デッドタイムdを能動的に変化させる。そして設定される線間電流iaの電流値に達したあとでは、デッドタイムが一定となるように調整する。制御装置24は、デッドタイムが一定となるように調整して所定期間経過すると、そのときに推定される磁極の角速度および角度位置の精度が高いことを判断して、通常推定期間に移行してもよい。
図12は、本発明の第2実施形態の制御装置24の粗推定期間における制御ブロック構成を示すブロック図である。図12に示す本実施の形態では、粗推定期間においてデッドタイムdを能動的に変化させる。その他の構成については、第1実施形態の制御装置24と同様であるので、同様である構成については説明を省略する。
制御装置24は、2つの電流センサ28a,28bからそれぞれ与えられる線間電流iaから、磁極と同じ速度で回転する回転座標系上の磁極が発生する磁束に平行なd軸電流と、これより(π/2)位相が進んだq軸電流とに変換する。そして制御装置24は、粗推定期間において、q軸電流に基づいて、デッドタイムを操作する。なお、q軸電流は、電流センサによる実効値を用いることもある。
具体的には、制御装置24は、実際に測定された電流から求められるq軸電流実測値Iδrを入力値とし、予め定めるq軸電流指令値Iδを目標値とする。またq軸電流指令値Iγrは、線間電流iaの設定電流値となる−30Aに設定される。また初期デッドタイムd0も予め定められる値が設定される。
制御装置24は、インバータ回路を制御するための制御部70として、第1減算器60と、第1演算器61と、第1加算器62とを有する。第1減算器60は、q軸電流指令値Iδと、q軸電流実測値Iδrとを取得して、q軸電流指令値Iδからq軸電流実測値Iδrを減算し、その演算結果を第1演算器61に与える。第1演算器61は、第1減算器60の演算結果を予め定める演算式に従って演算処理し、デッドタイムを変化させるための操作量を演算する。本実施の形態では、第1演算器61は、第1減算器60の演算結果に予め定める比例ゲインKqpを乗算した比例値と、第1減算器60の演算結果を積分した積分値に予め定める積分ゲインKqiを乗算した積分値とを求める。
第1加算器62は、初期デッドタイムd0と、第1演算器61で演算された比例値と積分値とを取得して、それらを加算し、その演算結果を新たなデッドタイムとして設定する。そして設定したデッドタイムとなるようにゲート信号をインバータ回路22に与えて、インバータ回路22を制御する。
これによってq軸電流指令値Iδとq軸電流実測値Iδrとが一致しないと、デッドタイムを変化させ、時間経過とともにq軸電流実測値Iδrをq軸電流指令値Iδに一致させることができるデッドタイムにすることができる。なお、第1演算器61で積分演算を含ませることで、q軸電流実測値Iδrとq軸電流指令値Iδとの間に定常偏差が生じることを防いで、より正確にq軸電流指令値Iδとq軸電流実測値Iδrとを一致させることができるデッドタイムを演算することができる。
図11に示したように、q軸電流指令値Iδの電流が流れるときのデッドタイムを求めることで、誘起電圧Emを求めることができる。制御装置24は、磁極の角速度と角度位置とを推定するための推定部71として、スケール変換器67と、第2減算器64と、第2演算器65と、第2加算器66と、積分器68とを有する。
スケール変換器67は、制御部70によって演算されるデッドタイムを取得し、取得したデッドタイムに、予め定めるスケール変換係数Kwtを乗算する。このスケール変換係数Kwtは、デッドタイムから磁極の角速度を演算するための係数であり、上述した(4)式または(5)式と、(2)式とに基づいて、求めることができる。スケール変換部67は、演算結果を、磁極の角速度推定値として出力する。
第2減算器64は、d軸電流指令値Iγと、d軸電流実測値Iγrとを取得して、d軸電流指令値Iγからd軸電流実測値Iγrを減算し、その演算結果を第2演算器65に与える。たとえばd軸電流指令値Iγは、0Aに設定される。第2演算器65は、第2減算器64の演算結果を予め定める演算式に従って演算処理し、磁極の角度を推定するための演算量を演算する。本実施の形態では、第2演算器65は、第2減算器64の演算結果に予め定める比例ゲインKdpを乗算した比例値と、第2減算器64の演算結果を積分した積分値に予め定める積分ゲインKdiを乗算した積分値と、を加算した演算結果を第2加算器66に与える。
積分器68は、スケール変換部67から与えられる磁極の角速度推定値を取得し、その推定値を積分し、第2加算器66に与える。第2加算器66は、第2演算器65から与えられる演算結果と、積分器68から与えられる演算結果とを加算し、磁極の角度推定値として出力する。
このようにして、制御装置24は、粗推定期間における磁極の角速度と角度位置とを推定することができる。なお、上述した制御部70および推定部71の各ブロックによる動作は、ハードウェア的に実現してもソフトウェア的に実現してもよい。ソフトウェア的に実現する場合、制御装置24が図12のブロック図に相当する制御プログラムを実行することによって各ブロックに相当する動作が実現される。また、上述したブロック構成は、実施の形態の一例である。したがって各演算器の一部が異なったり、加算器および減算器の加減算が異なったりしても、本実施の形態に含まれる。
図13は、制御装置24の通常推定期間における制御ブロック構成を示すブロック図である。制御装置24は、粗推定期間と通常推定期間とで推定方法を異ならせる。通常推定期間においては、デッドタイムdnを予め定められる値に固定する。なお、通常推定期間における磁極の角速度と角度の推定と、インバータ回路22の制御については、周知の推定方法および制御方法を用いることができる。
本実施の形態では、制御装置24は、磁極の角速度と角度位置を推定するための推定部72と、インバータ回路22を制御するための制御部73とを有する。推定部72は、d軸電流実測値Iγrとq軸電流実測値Iδrとを演算するdq変換器80と、同期電動機21のモデルを表わすモデル演算式を有するモデル器81と、第3減算器83と、モデル器81の出力に基づいて磁極の角速度、角度位置、誘起電圧を推定する推定アルゴリズムを有する推定器82とを含む。
dq変換器80は、電流センサから与えられる電流値Iu,Ivと、推定部82によって推定される磁極の角度位置θmとに基づいて、d軸電流実測値Iγrとq軸電流実測値Iδrとを演算し、演算結果をモデル器81に与える。
モデル器81は、dq変換器80からd軸電流実測値Iγrとq軸電流実測値Iδrとが与えられるとともに、制御部73からd軸電圧操作値Vγとq軸電圧操作値Vδとが与えられる。また推定器82によって推定された誘起電圧Emが与えられる。
モデル器81は、与えられたそれらの情報をモデル演算式に代入してモデル演算式を解く。そして同期電動機21に流れるであろう電流値である、d軸モデル実電流値IMγとq軸モデル実電流値IMδとを演算し、演算結果を第3減算器83に与える。第3減算器83は、モデル器81からd軸モデル実電流値IMγとq軸モデル実電流値IMδとが与えられるとともに、dq変換器80からd軸電流実測値Iγrとq軸電流実測値Iδrとが与えられ、それらの偏差を演算する。具体的には、d軸電流実測値Iγrからd軸モデル実電流値IMγを減算して、d軸電流誤差ΔIγを求め、q軸電流実測値Iδrからq軸モデル実電流値IMδを減算して、q軸電流誤差ΔIδを求める。第3減算器83は、演算結果を推定器82に与える。
推定器82は、第3減算器83から各電流誤差ΔIγ,ΔIδが与えられ、各電流誤差ΔIγ,ΔIδと、予め定められる推定アルゴリズムとに基づいて、誘起電圧Emと、磁極の角度位置θmと、磁極の角速度ωmとを推定する。推定器82は、推定した誘起電圧Emをモデル器81に与える。また推定した磁極の角度位置θmを、dq変換器80と、逆dq変換器87とに与える。また推定した磁極の角速度ωmを制御部73に与える。
制御部73は、第4減算器84と、速度制御器85と、電流制御器86と、逆dq変換器87と、PWMパルス発生器88とを有する。第4減算器84は、予め設定される速度指令値ωrと推定角速度ωmとを取得する。そして、速度指令値ωrから推定角速度ωmを減算し、演算結果を速度制御器85に与える。速度制御器85は、第4減算器84から与えられる演算結果に基づいて、q軸電流指令値Iδを演算し、電流制御器86に演算結果を与える。
電流制御器86は、速度制御器85から与えられたq軸電流指令値Iδが与えられるとともに、トルクおよび速度などに応じて設定されるd軸電流指令値Iγが与えられる。そしてこれらの情報から、d軸電圧操作値Vγとq軸電圧操作値Vδを演算する。そして演算結果をモデル器81と逆dp変換器87とに与える。逆dp変換器87は、与えられる各電圧操作値Vγ,Vδを、3相の電圧操作値に変換し、PWMパルス発生器88に与える。PWMパルス発生器88は、逆変換器87から与えられた3相の電圧操作値を、パルス幅変調し、ゲート信号としてPWMインバータ回路22に与える。
このように通常推定期間において、制御装置24が、速度指令ωrに基づくことによって、同期電動機21の回転子を所定の回転速度で回転させることができる。また制御装置24は、d軸電流指令値Iγに基づいて電流制御を行うことで、d軸成分の電流を同期電動機21に与えることができる。これによって弱め界磁制御を行うことができる。すなわち回転子が高速回転することに起因して誘起電圧Emが増大した場合に、同期電動機21の発生トルクの低下を抑えることができる。なお、本実施形態では、磁極の角速度および角度を推定する推定部72、いわゆるオブザーバを有する。したがってエンコーダおよびレゾルバなどの磁極の角速度を測定するセンサを必要としない。これによって電動機駆動制御システム20を安価に構成することができるとともに、構造を簡単化することができ、メンテナンス性を向上することができる。
また、粗推定期間から通常推定期間に移行するときに、粗推定期間で推定された磁極の角速度および角度位置を、通常推定期間における推定値の初期値とする。具体的には、速度制御器85に与えられる推定角速度ωm、dq変換器80および逆dq変換器87に与えられる推定角度θm、モデル器81に与えられる誘起電圧Emに与えられる。また推定部72および制御部73の有する複数の積分器のうちのいくつかに、初期値として適切に与えられる。
図14は、制御装置24の動作を示すフローチャートである。制御装置24は、ステップs0では、電圧センサ29などから電源が投入されたことを判断すると、ステップs1に進み、PWMインバータ回路22の制御動作を開始する。
ステップs1では、制御装置24を初期化し、ステップs2に進む。ステップs2では、上述した粗推定期間における推定方法で磁極の角速度と角度位置との推定を開始する。具体的には、デッドタイムを初期デッドタイムから徐々に狭めながら、線間電流iaの電流値を設定電流iaとなるように調整し、ステップs3に進む。
ステップs3では、線間電流iaが設定電流値に調整されて、デッドタイムdが一定となったことを判断すると、そのときの磁極の角速度と角度位置と誘起電圧とを記憶し、ステップs4に進む。ステップs4では、ステップs3で記憶した磁極の角速度と角度位置と誘起電圧とを、通常推定期間の開始時における推定値の初期値として代入する。そして通常推定期間における推定方法で磁極の角速度と角度位置とを推定しながら、予め設定される速度で磁極が角変位するように、PWMインバータ回路22にゲート信号を与える。そして終了指令が与えられると、ステップs5に進み、動作を終了する。
図15は、デッドタイムd、磁極の角速度ω、磁極の角度位置θ、線間電流iaの時間変化を示すタイミングチャートである。まず推定が開始されると、粗推定期間となり、次に通常推定期間となる。
制御開始時には、デッドタイムは、初期デッドタイムd0であり、時間経過とともに狭くなり、誘起電圧Emに依存する一定値に調整される。線間電流iaは、初期デッドタイムが広い値に設定されるので、電流値がゼロまたは非常に小さい状態から始まる。そして時間が経過して、ある程度デッドタイムが狭くなってから電流が流れ始める。電流が流れたあとは、時間経過とともに電流値の絶対値が増加する。磁極の角速度および角度位置の推定は、デッドタイムの変化とともに変化する。
線間電流iaの電流値が予め定める設定電流値に達すると、磁極の角速度および角度位置の推定が精度良く行われたことになる。デッドタイムは、線間電流iaの電流値が予め定める設定電流値に達したあとは、一定値となる。デッドタイムが予め定める時間一定であることを制御装置24が判断すると、通常推定期間に移行する。
通常推定期間に移行すると、デッドタイムを通常推定期間におけるデッドタイムに調整する。また粗推定期間で推定した磁極の角速度および角度位置を初期値として、通常推定期間の推定を開始する。また同期電動機の制御に起因して線間電流iaの大きさを変化させる。
以上のように、第2の実施形態によれば、通常推定期間におけるデッドタイムdnよりも、粗推定期間におけるデッドタイムdwを広くする。これによって推定開始の初期期間において、インバータ回路22から同期電動機21に流れる電流を少なくすることができる。これによってインバータ回路22の推定を開始した初期期間において、磁極の角速度および角度位置の推定精度が低い場合であって、インバータ回路22の出力電圧と同期電動機によって発生する誘起電圧との位相がずれている場合、誘起電圧が大きい場合でも、インバータ回路22から同期電動機21に流れる電流が過電流となることを防ぐことができる。また通常推定期間では、粗推定期間において推定された磁極の角速度および角度位置を、通常推定期間における推定に関する初期値として代入することで、推定精度が高くなっているので、デッドタイムを狭めて同期電動機21に流れる電流を大きくしても、インバータ回路22および同期電動機21に流れる電流が、過電流となることを防ぐことができる。これによって通常推定期間においてセンサレス制御を開始しても、同期電動機21をショックレスにかつ滑らかに回転させることができる。また粗推定期間からの推定結果を利用することによって、通常推定期間での推定精度を高めることができ、同期電動機21に与える電流が小さくても、同期電動機21が発生可能なトルクを大きくすることができる。すなわち同期電動機21のトルクを効率よく発生させることができる。
このように本実施形態によれば、磁極の角度位置を測定するためのセンサを用いる必要がないので、電動機駆動制御システム20の構造を簡単化することができ、大幅なコストダウンが見込めるとともに、メンテナンス性を向上することができる。また、同期電動機が用いられる環境条件として、粉塵、振動、温度などの条件が厳しく、センサを用いることができない場合でも、センサレスで同期電動機を制御可能とすることができる。
また推定を開始した初期期間における推定精度が低くても、過電流となることを防ぐことができるので、インバータ回路22および同期電動機21に過大な負荷がかかることをなくすことができ、それらが損傷することを防いで、電動機駆動制御システム20の寿命を延ばすことができる。また回転子が停止するまで待たずに、インバータ回路22の制御を開始することができるので、時間的ロスをなくすことができる。またデッドタイムを変化させることによって、能動的に電流を絞ることができ、制御装置24によって設定される推定方法、フィードバック周期などの影響にかかわらずに、確実に過電流を防ぐことができる。これによって広い範囲で本実施形態を適用することができる。
また粗推定期間と通常推定期間とでは、デッドタイムが異なることで、インバータ回路22から流れる電流も異なる。本実施形態では、図12および図13に示すように、通常推定期間と粗推定期間とで、推定部の推定方法を異ならせることによって、粗推定期間および通常推定期間での電流値から、磁極の角速度および角度位置をそれぞれ精度良く推定することができ、推定精度を向上することができる。具体的には、粗推定期間と通常推定期間とで推定に用いるインバータ回路22のモデルを変更することによって、推定精度を向上することができる。また、図12および図13に示す制御装置24の制御ブロック構成を模式的に示すものであって、制御装置24の一部を示すものである。したがって制御装置24は、図12および図13の構成が全てではなく、他の構成を有していてもよい。たとえば図12および図13に示す制御ブロックは、制御装置24のうちの記憶手段に記憶される動作プログラムを制御装置24のうちの演算手段が実行することによってそれぞれ実現することができる。
図6に示すように本発明の第1実施形態として、通常推定期間のデッドタイムよりも、粗推定期間においてデッドタイムを広くした固定のデッドタイムを用いたときに、測定される電流値に基づいて誘起電圧を推定してもよい。しかしながら、粗推定期間においてデッドタイムが一定の場合には、誘起電圧Emが大きければ過電流となり、誘起電圧Emが小さければ電流が流れないおそれがある。
これに対して本発明の第2実施形態では、粗推定期間においてデッドタイムを、初期デッドタイムd0から徐々に狭める。この場合、電流値が徐々に変化し設定電流値に達する。これによって過電流となる前に、磁極の角速度および角度位置を推定可能となるような電流値の電流を流すことができ、過電流とならずに、確実に推定を行うことができる。また、デッドタイムを操作量とすることによって、設定電流値に達するデッドタイムを短時間で設定することができ、粗推定期間を短縮することができる。これによって通常推定期間に素早く移行することができる。
また図11に示すように、本実施形態では、インバータ回路22の出力平均電圧をゼロとした状態で、予め定める設定電流値が流れた場合のデッドタイムに基づいて誘起電圧を推定する。そして、図12に示すブロック構成に従い、誘起電圧Emから磁極の角速度および角度位置を推定する。これによってデッドタイムの変化にかかわらず、磁極の角速度および角度位置を容易に推定することができる。また、電流実測値を電流指令値となるようにデッドタイムを制御することで、インバータ回路22から同期電動機に流れる電流値が指令値を超えることを防ぎ、過電流を確実に抑えることができる。
このような本実施の形態の電動機駆動制御システム20は、同期電動機の回転子が高速で回転する分野に好適に適用することができ、たとえば電車車両に搭載される空調換気装置に好適に適用することができ、車両がセクション通過して電力が再供給された場合に、負荷なく、素早く同期電動機の制御を再開することができる。
図16は、制御装置24の他の動作を示すフローチャートである。制御装置24は、推定開始時の磁極の角速度が、予め定める始動速度以下の場合には、始動速度に達するように、同期電動機を始動制御する場合がある。この場合は、ステップs10〜ステップs13において、図14に示すステップs0〜ステップs3と同様の動作を行い、ステップs13で粗推定が完了したことを判断すると、ステップs14に進む。ステップs14では、制御装置24は、推定した磁極の角速度が、予め定める始動速度以上であるか否かを判断する。制御装置24が、推定した磁極の角速度が始動速度未満であると判断した場合には、ステップs15に進む。また推定した磁極の角速度が始動速度以上であると判断すると、ステップs16に進む。
ステップs15では、予め定められる始動シーケンスに従って、インバータ装置22を制御して同期電動機を回転させ、ステップs16に進む。ステップs16においても、ステップs13で推定した磁極の角速度、角度位置、誘起電圧を、始動シーケンスにおける初期値として代入する。そして磁極の角速度が、始動速度以上となると、そのときの磁極の角速度と角度位置と誘起電圧とを記憶し、ステップs16に進む。
ステップs16では、その前のステップで記憶した磁極の角速度と角度位置と誘起電圧とを、通常推定期間の開始時における推定値の初期値として代入する。そして通常推定期間における推定方法で磁極の角速度と角度位置とを推定しながら、予め設定される速度で磁極が角変位するように、PWMインバータ22にゲート信号を与える。そして終了指令が与えられると、ステップs17に進み、動作を終了する。
このような動作を行う場合であっても、上述と同様の効果を得ることができる。また粗推定期間における推定値を初期値として、始動シーケンスを行うことで、始動シーケンス動作時においても、過電流が生じることを抑えることができる。また始動時において、同期電動機21をショックレスにかつ滑らかに回転させることができる。始動シーケンスとして、たとえば所定速度に達するまで、インバータの出力電圧、周波数を一定とする方法がある。
図17は、本発明の第3実施形態における制御装置24の粗推定期間における制御ブロック構成を示すブロック図である。第3実施形態は、第2実施形態の構成と類似する構成を有する。第3の実施形態のうち、第2実施形態の構成に相当する構成については、説明を省略し、同様の参照符号を付する。第2の実施形態では、q電流実測値Iδrに従ってデッドタイムを変化させたが、第3の実施形態では、デッドタイムは、q電流実測値Iδrにかかわらず、初期デッドタイムd0から時間経過とともに狭くなるように設定する。したがってデッドタイムdの変化は、時間の関数f(t)によって決定される。また粗推定期間におけるデッドタイムdnを時間とともに狭くさせて、粗推定期間におけるデッドタイムが通常推定期間におけるデッドタイムdwと等しくなると、デッドタイムの変化を停止させる。
制御装置24の制御部70は、インバータ回路22の推定を開始してから予め定める条件が成立するまでの粗推定期間と、推定を開始してから予め定める条件が成立した後の通常推定期間とを判断する。
制御部70は、インバータ回路22の推定を開始したときの初期デッドタイムd0が、通常推定期間におけるデッドタイムdnよりも広くする。そして粗推定期間における時間経過とともにデッドタイムdwが狭くなるように変化させる。なお、本実施形態では、制御部は、粗推定期間の終了直前におけるデッドタイムdwを、通常推定期間のデッドタイムdnとほぼ等しくする。
また制御部70は、q軸電流実測値Iδrに基づいて、インバータ回路22のPWM変調率を変化させる。推定部71は、制御部70から出力されるPWM変調率に基づいて、磁極の角速度を推定する。また推定した磁極の角速度とd軸電流実測値Iγrとに基づいて、磁極の角度位置を推定する。たとえば通常推定期間のデッドタイムdwに到達したときの、PWM変調率と誘起電圧との関係式を既に取得しており、この関係式に変調率を代入することで誘起電圧を推定する。
具体的には、制御装置24は、第2の実施形態と同様に、第1減算器60と、第1演算器61と、第1加算器62とを有する。第2の実施形態と異なるのは、第1演算器61がインバータ回路22のPWM電圧変調率およびインバータ周波数を変化させるための操作量を演算することである。また第1加算器62は、第1減算器60の演算結果に予め定める比例ゲインKqpを乗算した比例値と、第1減算器60の演算結果を積分した積分値に予め定める積分ゲインKqiを乗算した積分値とを求める。
第1加算器62は、第1演算器61で演算された比例値と積分値とを取得して、それらを加算し、その演算結果を新たなPWM変調率として設定する。そして制御装置24は、演算したデッドタイムおよびPWM変調率となるように、インバータ回路22を制御する。なお変調率は、大略的に誘起電圧Emに依存した値となるので、変調率から磁極の角速度および角度位置とを求めることができる。制御装置24は、第2の実施形態と同様に、推定部71として、スケール変換器67と、第2減算器64と、第2演算器65と、第2加算器66と、積分器68とを有する。
スケール変換器67が、制御部70によって演算されるPWM変調率を取得し、取得したPWM変調率に予め定めるスケール変換係数KWVを乗算する。このスケール変換係数は、変調率から磁極の角速度を演算するための係数である。スケール変換部67は、演算結果を、磁極の角速度推定値として出力する。なお、第2減算器64と、第2演算器65と、第2加算器66と、積分器68とについては、第2の実施形態と同様であるので説明を省略する。また本実施の形態では、PWM変調率を変化させて、q軸電流実測値Iδrをq軸電流指令値Iδに近づけ、そのときのPWM変調率に基づいて誘起電圧Emを求めた。このほか、PWM変調率以外のパラメータを変更させて、q軸電流指令値Iδに達したときのパラメータ値に基づいて誘起電圧Emを求めることができる。このパラメータは、線間電流iaが予め定める設定電流値において、誘起電圧Emと一対一で対応するパラメータであり、制御装置24によって制御可能なパラメータとなる。
図18は、デッドタイムd、磁極の角速度ω、磁極の角度位置θ、線間電流iaの時間変化を示すタイミングチャートである。まず制御動作が開始されると、粗推定期間となり、次に通常推定期間となる。
制御開始時には、デッドタイムは、初期デッドタイムd0であり、時間経過とともに狭くなり、通常推定期間のデッドタイムdnと同じになるとその変化を停止する。線間電流iaは、初期デッドタイムd0が広く設定されるので、電流値がゼロまたは非常に小さい状態から始まる。そして時間が経過して、ある程度デッドタイムが狭くなると、電流が流れ始める。そして電流実測値が予め定める電流指令値に収束するように、PWM電圧変調率と、インバータ周波数と、推定角度とが調整される。たとえば図18では、電流指令値はゼロに設定される。磁極の角速度および角度位置の推定は、PWM変調率の変化とともに変化する。
このような実施形態においても、推定時間が長くなるにつれて、磁極の角速度および角度位置の推定の精度が向上し、粗推定期間におけるデッドタイムdwが通常推定期間におけるデッドタイムdnに達した状態では、磁極の角速度と角度位置の推定が正確に行われることになる。制御装置24は、通常推定期間におけるデッドタイムdnと等しくなってから、予め定める時間が経過したと判断すると、通常推定期間に移行し、同期電動機21の制御を開始する。同期電動機21の制御を開始する場合、粗推定期間に推定した磁極の角速度および角度位置を初期値として、通常推定期間の推定を開始する。また同期電動機の制御に起因して線間電流iaの大きさが変化する。たとえば粗推定期間は、同期電動機の回転周期の1/4以内に設定される。
以上のように、第3の実施の形態によれば、第2の実施の形態と同様の効果を得ることができる。また、粗推定期間におけるデッドタイムdwの変化を、電流実測値にかかわらずに行わせることによって、デッドタイムdを能動的に変化させる必要がなく、デッドタイムdの設定を容易に行うことができる。また、粗推定期間が終わる直前には、デッドタイムdwは、通常推定期間のデッドタイムdnと等しく設定されるので、粗推定期間から通常推定期間に移行しても、デッドタイムdの変化によるショックをなくすことができる。したがって通常推定期間においてセンサレス制御を開始しても、同期電動機21をショックレスにかつ滑らかに回転させることができる。
また、粗推定期間のうちで、デッドタイムdを変化させる変化期間と、通常推定期間と等しいデッドタイムdnとする定常期間を設ける。定常期間を設けることで、変調率とデッドタイムとがともに変化する場合であっても、粗推定期間の終わりには、磁極の角速度と角度位置とを精度良く推定することができる。
図19は、本発明の第4実施形態である発電制御システム120を示すブロック図である。本発明の第4実施形態の発電制御システム120は、同期発電機121を用いて直流電力を生成し、たとえば風力発電機などに用いられる。この場合、同期発電機121の回転子に風によって回転する風車が接続される。制御システム120は、同期発電機121の回転子が回転した状態で、同期発電機121から発電される電力の整流制御を開始することになる。
制御システム120は、同期発電機121の回転子の磁極の角速度および角度位置を推定して、推定した磁極の角速度および角度位置に追従するように、整流装置であるPWMコンバータ回路122の動作を調整する。発電制御システム120は、同期発電機121と、PWMコンバータ回路122と、負荷回路部123と、制御装置124とを含んで構成される。
同期発電121は、3相同期発電機であり、回転子の角度位置を検出するための角度センサが設けられないセンサレスに構成される。負荷回路123は、PWMコンバータ回路122によって整流された直流電力が与えられ、電圧センサ129が設けられる。電圧センサ129は、コンバータ回路122から負荷回路123へ印加される直流母線電圧信号を制御装置124に与える。
PWMコンバータ回路122は、同期発電機122で発生された交流電力を直流電力に整流し、たとえば三相のブリッジ回路から成る。コンバータ回路122の構成は、図2に示すインバータ回路22とほぼ同様であり、説明を省略する。またコンバータ回路122と同期発電機122とを接続する3つの接続経路127のうちの2つには、電流センサ128が介在される。各電流センサ128は、電流の実測値を制御装置124に与える。
制御装置124は、電圧センサ129から与えられる直流母線電圧センサ信号と、電流センサ128から与えられる各電流センサ信号とを取得する。制御装置124は、取得した電流センサ信号に基づいて、同期発電機121を流れる電流実測値を判断する。また制御装置124は、他の装置から制御開始指令に基づいて、推定開始のタイミングを判断する。
制御装置124は、同期発電機21を流れる電流実測値に基づいて、同期発電機121の回転子の磁極の角速度と角度位置とを推定する推定部と、推定部によって推定された磁極の角速度と角度位置とに基づいて、磁極の角速度が予め定められる角速度となるように、コンバータ回路122の各スイッチング素子Trにゲート信号をそれぞれ与える制御部とを有する。
本実施の形態では、このような発電システムにおいても適用することができる。制御部は、推定部による磁極の角速度と角度位置との推定を開始してから予め定める条件が成立するまでの粗推定期間と、推定部による推定を開始してから予め定める条件が成立した後の通常推定期間とを判断する。制御部は、粗推定期間におけるデッドタイムが、通常推定期間におけるデッドタイムよりも広くなるように、コンバータ回路122の各スイッチング素子Trにゲート信号を与える。また本実施の形態では、制御部は、通常推定期間において、推定部の推定結果に基づいて、コンバータ回路122を介して同期電動機21の制御を開始する。
図20は、第4実施形態におけるデッドタイムd、磁極の角速度ω、磁極の角度位置θ、線間電流iaの時間変化を示すタイミングチャートである。第4実施形態では、制御装置124の構成は、第2の実施の形態に類似する。
制御装置124は、図12および図13に相当する制御ブロックを有し、粗推定期間におけるデッドタイムを、通常推定期間におけるデッドタイムよりも広くする。制御装置124は、粗推定期間において、q軸電流実測値Iδrがq軸電流指令値Iδとなるように、デッドタイムを徐々に狭める。そして変化させたデッドタイムに基づいて、同期発電機121の回転子の磁極の角速度を推定する。また推定した角速度とd軸電流実測値Iδとに基づいて、磁極の角度位置を推定する。
図20に示すように、制御開始時には、デッドタイムは、初期デッドタイムd0であり、q軸電流指令値Iδとq軸電流実測値Iδrとの偏差に基づいて狭くなり、誘起電圧Emに依存する一定値に調整される。線間電流iaは、初期デッドタイムd0が広い値に設定されるので、電流値がゼロまたは非常に小さい状態から始まる。そして時間が経過して、ある程度デッドタイムが狭くなってから電流が流れ始める。電流が流れたあとは、時間経過とともに電流値の絶対値が増加する。磁極の角速度および角度位置は、デッドタイムの変化にともなって推定される。
線間電流iaの電流値が予め定める設定電流値に達したあと、デッドタイムは、一定値となる。この場合、磁極の角速度および角度位置の推定が精度良く行われたことになる。デッドタイムが予め定める時間一定であることを制御装置124が判断すると、通常推定期間に移行する。
通常推定期間に移行すると、デッドタイムdを通常推定期間におけるデッドタイムdnに調整する。また粗推定期間で推定した磁極の角速度および角度位置を初期値として、通常推定期間における磁極の角速度および角度位置の推定を開始する。そして磁極の角速度および角度位置に追従した動作が行われるように、コンバータ回路122を制御する。
図21は、本発明の第5実施形態におけるデッドタイムd、磁極の角速度ω、磁極の角度位置θ、線間電流iaの時間変化を示すタイミングチャートである。本発明の第5実施形態では、制御装置124の構成は、第3の実施の形態に類似する。
制御装置124は、図13および図17に相当する制御ブロックを有し、粗推定期間のうちの初期デッドタイムd0を通常推定期間におけるデッドタイムdnよりも広くする。制御装置124は、粗推定期間を開始してから、時間経過とともにデッドタイムdを徐々に狭める。また粗推定期間において、q軸電流実測値Iδrがq軸電流指令値Iδとなるように、PWMの電圧変調率を調整する。そして変化させた変調率に基づいて、同期発電機121の回転子の磁極の角速度を推定する。また推定した角速度とd軸電流実測値Iδrとに基づいて、磁極の角度位置を推定する。
図21に示すように、制御開始時には、デッドタイムdは、初期デッドタイムd0であり、時関経過に基づいて狭くなり、通常推定期間におけるデッドタイムdnと等しくなるよう調整される。線間電流iaは、初期デッドタイムd0が広い値に設定されるので、電流値がゼロまたは非常に小さい状態から始まる。そして時間が経過して、ある程度デッドタイムが狭くなってから電流が流れ始める。電流が流れたあとは、時間経過とともに電流値の絶対値が増加する。電流値は、デッドタイムの増加とともに変化するが、PWM変調率が調整されることによって、予め定める値に調整される。磁極の角速度および角度位置の推定は、PWM変調率の変化にともなって推定される。
粗推定期間においてデッドタイムdwが通常推定期間のデッドタイムdnと等しくなってから、予め定める期間経過すると、磁極の角速度および角度位置の推定が精度良く行われたことになる。デッドタイムと等しくなってから予め定める期間が経過したことを制御装置124が判断すると、通常推定期間に移行する。
通常推定期間に移行すると、デッドタイムdを通常推定期間におけるデッドタイムdnに調整する。また粗推定期間で推定した磁極の角速度および角度位置を初期値として、通常推定期間における磁極の角速度および角度位置の推定を開始する。そして磁極の角速度および角度位置に追従した動作が行われるように、コンバータ回路122を制御する。
第4実施形態および第5実施形態によれば、制御開始の初期期間では、コンバータ回路122から同期発電機121に流れる電流が少なくなり、初期期間における磁極の角速度と角度位置との推定が正確でなくとも、コンバータ回路122および同期発電機121が過電流となることを抑制することができる。また通常推定期間では、制御開始から時間が経過して推定精度が高くなっているので、デッドタイムを狭めてコンバータ回路122から同期発電機121に流れる電流を大きくしても、コンバータ回路122および同期発電機121が過電流となることが防がれる。これによって、上述した第1〜第3実施形態と同様の効果を得ることができる。
上述した本発明の各実施形態は、本発明の例示に過ぎず、発明の範囲内において構成を変更することができる。たとえば粗推定期間においてデッドタイムを広くすればよく、粗推定期間と通常推定期間とで推定方法が同じであってもよい。また第2〜第5実施形態では、粗推定期間においてデッドタイムdwを広い状態から狭い状態に変化させるようにしたが、一定の値であってもよい。この場合の粗推定期間におけるデッドタイムは、少なくとも通常推定期間のデッドタイムよりも広く設定される。また粗推定期間と通常推定期間とで推定方法を異ならせる場合も、上述した方法に限定されない。
また制御部は、推定部による推定を開始してから予め定める時間が経過すると、通常推定期間の開始を判断するとしたが、これに限らず、予め定める条件が成立したことによって、通常推定期間の開始を判断してもよい。たとえば粗推定期間において、磁極の角速度および角度位置の推定に用いられる物理量、たとえば同期電動機または同期発電機を流れる電流値、デッドタイム、電圧変調率などが予め定める一定期間以上、安定すると通常推定期間の開始を判断してもよい。また推定値と実測値との偏差が予め定める範囲内に達した場合に、通常推定期間の開始を判断してもよい。
また第1実施形態において、粗推定期間においてデッドタイムが短くなっていればよく、誘起電圧Emが正負のいずれかである場合に、線間電流iaが正負のいずれかとなるようにデッドタイムが調整されなくてもよい。また第1オン期間W11と第2オン期間W12とが異なる場合、第1デッドタイムdw1と第2デッドタイムdw2とが同じに設定されなくてもよい。
また、上述した電子回路およびブロック図は、本発明の一例示であり、同様の効果を得ることができるならば適宜変更してもよい。PWMインバータ/コンバータ回路として、フルブリッジ型としたが、ハーフブリッジ型でも同様に実現でき、いわゆる自励インバータ/コンバータ回路であればよい。また図12および図17に示す演算器61,65の演算内容は、これに限定されず、他の構成であってもよい。また本実施形態では、車両の換気装置、風力発電装置に適用した例について示したが、回転した状態で同期機の制御を開始する制御装置全般に適用することができる。なお、同期機とは、同期電動機および同期発電機を含む。また本実施の形態では、制御部は、通常推定期間においインバータ/コンバータ回路を介して同期機の制御を開始するとしたが、粗推定期間においても、推定部の推定結果に基づいて、インバータ/コンバータ回路を介して同期機の制御を行ってもよい。
また上述する同期機の回転子の角速度および角度位置の推定方法および同期機の制御方法、同期機の制御に用いられるインバータ/コンバータ回路を制御する制御方法についても、本発明に含まれる。またこれらの方法を制御装置に実行させるプログラムおよびプログラムが記憶された記憶媒体についても本発明に含まれる。