JP4770253B2 - 車両の故障診断方法及び装置 - Google Patents
車両の故障診断方法及び装置 Download PDFInfo
- Publication number
- JP4770253B2 JP4770253B2 JP2005126407A JP2005126407A JP4770253B2 JP 4770253 B2 JP4770253 B2 JP 4770253B2 JP 2005126407 A JP2005126407 A JP 2005126407A JP 2005126407 A JP2005126407 A JP 2005126407A JP 4770253 B2 JP4770253 B2 JP 4770253B2
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- failure
- current feedback
- hydraulic
- command value
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images





Landscapes
- Control Of Transmission Device (AREA)
Description
なお、故障検知手段を新たに設けた自動変速機の故障診断装置(特許文献1参照)や故障診断装置(特許文献2参照)においては、リニアソレノイドや油圧スイッチの故障を検知することはできるが、アナログ油圧センサや断線検知回路を新たに設ける必要があり、コストアップをもたらすことが避けられない。
また、この発明に係る車両の故障診断装置により、上記車両の故障診断方法を実現することができる。
図1は、この発明の一実施の形態に係る車両の故障診断装置の概略構成を示すブロック説明図である。図1に示すように、車両の故障診断装置であるコントロールユニット10は、電動のアクチュエータである油圧ポンプ(電動ポンプ)11を有する車両、例えば、ハイブリッド電気自動車(HEV)に搭載されており、車両を統合制御する機能を有している。このようなコントロールユニット10としては、例えば、ハイブリッドコントローラモジュール(HCM)がある。
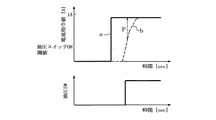
図4に示すように、電流指令値aに対して電流フィードバック値bが追従せず、電流指令値aと電流フィードバック値bの偏差Pが故障判定閾値より大きければ、コントロールユニット10のハードウェア或いはリニアソレノイド18に故障が発生したと判定する。なお、油圧スイッチ19は、電流フィードバック値bが油圧スイッチオン閾値の近傍に達した時点でオンしており、正常である。
油圧SWON閾値−許容幅<電流フィードバック値b<油圧SWON閾値+許容幅
の間で油圧スイッチ19がオンしていなければ、油圧スイッチ19、油圧回路等の油圧系に故障が発生したと判定する。
次に、強電リレー16がオンする前に、コントロールユニット(HCM)10は、強電リレー16が壊れていないことの確認を行うため、モータコントローラ26にリレー診断要求を送信する。モータコントローラ26は、リレー診断要求を受信して診断を実施し、診断結果をコントロールユニット(HCM)10へ送信する。
充電完了信号を受信したコントロールユニット(HCM)10は、強電リレー(メインリレー)16をオンして、モータコントローラ26へ強電供給完了信号を送信すると共に、DC/DCコンバータ17へ起動信号を出力する。
ステップS104での判断の結果、故障判定閾値より大きい(yes)場合、クラッチ制御系故障と判定し(ステップS105)、車両を停止する(ステップS106)。その後、処理を終了する。一方、故障判定閾値より大きくない(no)場合、電流フィードバック値bが油圧スイッチオン閾値(油圧SWON閾値)の近傍に達した時に油圧スイッチ19がオンしたか否かを判断する(ステップS107)。
上述したように、ハイブリッド電気自動車(HEV)を制御するコントロールユニットの一つ(例えば、HCM)が、例えば、無段変速機(E−IVT)の変速制御を実施すると共に、例えば、リニアソレノイド等の電動アクチュエータも制御することにより、車両の故障診断を行う。
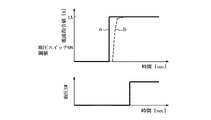
|電流指令値a−電流フィードバック値b|>故障判定閾値
であれば、コントロールユニット(HCM)10のハードウェア、リニアソレノイド18等の制御回路系に故障が発生したと判定する。
油圧SWON閾値−許容幅<電流フィードバック値b<油圧SWON閾値+許容幅
の間で油圧スイッチ19がオンしていなければ、油圧スイッチ19、油圧回路等の油圧系に故障が発生したと判定する。
これにより、ユニットの故障、車両の故障が発生したまま知らずに走行してしまうのを回避することができる。また、故障の発生をドライバに知らせることにより、故障箇所の修理・点検を促すことができる。
また、この発明に係る車両の故障診断装置により、上記車両の故障診断方法を実現することができる。
11 油圧ポンプ
12 バッテリ
13 イグニッション
14 ポンプドライバ
15 強電バッテリ
16 強電リレー
17 DC/DCコンバータ
18 リニアソレノイド
19 油圧スイッチ
20 変速ユニット
21 CPU
22 スイッチング素子
23 シャント抵抗
24 演算増幅器
25 エンジンコントローラモジュール
26 モータコントローラ
27 バッテリコントローラ
a 電流指令値
b 電流フィードバック値
c 油圧スイッチ信号
Claims (5)
- 出力側に、変速機の速度制御を行うアクチュエータ及び油圧スイッチを有する変速ユニットが接続された、車両を統合制御するコントロールユニットによる車両の故障診断方法において、
前記コントロールユニットによる、前記アクチュエータを作動させるための電流指令値を前記アクチュエータへ出力し、作動した前記アクチュエータからの電流フィードバック値の入力、及び前記油圧スイッチの作動を確認する処理と、
前記電流指令値と前記電流フィードバック値を比較する処理と、
前記電流指令値と前記電流フィードバック値の比較結果から、|電流指令値−電流フィードバック値|>故障判定閾値であれば、制御回路系が故障したと判定し、前記電流指令値の出力時の、前記電流フィードバック値と前記油圧スイッチの作動状態を比較した比較結果から、油圧スイッチオン閾値−許容幅<電流フィードバック値<油圧スイッチオン閾値+許容幅の間で前記油圧スイッチが作動していなければ、油圧系が故障したと判定する処理と
を有する車両の故障診断方法。 - 前記制御回路系の故障或いは前記油圧系の故障を判定した後に、前記車両を安全な状態に制御する処理及び故障を告知する処理を有する請求項1に記載の車両の故障診断方法。
- 故障したと判定する処理は、前記コントロールユニットの起動シーケンス制御における車両走行可能状態となる前に実施する請求項1または2に記載の車両の故障診断方法。
- 出力側に、変速機の速度制御を行うアクチュエータ及び油圧スイッチを有する変速ユニットが接続された、車両を統合制御するコントロールユニットによる車両の故障診断装置において、
前記コントロールユニットは、前記アクチュエータを作動させるための電流指令値を前記アクチュエータへ出力し、作動した前記アクチュエータからの電流フィードバック値の入力、及び前記油圧スイッチの作動を確認して、前記電流指令値と前記電流フィードバック値を比較し、前記電流指令値と前記電流フィードバック値の比較結果から、|電流指令値−電流フィードバック値|>故障判定閾値であれば、制御回路系が故障したと判定し、前記電流指令値の出力時の、前記電流フィードバック値と前記油圧スイッチの作動状態を比較した比較結果から、油圧スイッチオン閾値−許容幅<電流フィードバック値<油圧スイッチオン閾値+許容幅の間で前記油圧スイッチが作動していなければ、油圧系が故障したと判定する車両の故障診断装置。 - 前記制御回路系の故障或いは前記油圧系の故障を判定した後に、前記車両を安全な状態に制御すると共に故障を告知する請求項4に記載の車両の故障診断装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005126407A JP4770253B2 (ja) | 2005-04-25 | 2005-04-25 | 車両の故障診断方法及び装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005126407A JP4770253B2 (ja) | 2005-04-25 | 2005-04-25 | 車両の故障診断方法及び装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2006300284A JP2006300284A (ja) | 2006-11-02 |
| JP4770253B2 true JP4770253B2 (ja) | 2011-09-14 |
Family
ID=37468807
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2005126407A Expired - Fee Related JP4770253B2 (ja) | 2005-04-25 | 2005-04-25 | 車両の故障診断方法及び装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4770253B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101787249B1 (ko) | 2015-04-17 | 2017-10-18 | 도요타 지도샤(주) | 동력 전달 장치 |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5003951B2 (ja) * | 2007-09-19 | 2012-08-22 | アイシン・エィ・ダブリュ株式会社 | 車両用制御装置 |
| JP2016133133A (ja) * | 2015-01-15 | 2016-07-25 | 株式会社デンソー | 油圧制御装置 |
| KR101978349B1 (ko) * | 2017-05-11 | 2019-05-15 | 콘티넨탈 오토모티브 시스템 주식회사 | 차량 변속기의 솔레노이드 고착 진단장치 및 방법 |
| WO2020031677A1 (ja) * | 2018-08-07 | 2020-02-13 | ジヤトコ株式会社 | 自動変速機の制御装置 |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH11119826A (ja) * | 1997-10-09 | 1999-04-30 | Unisia Jecs Corp | ソレノイドの故障診断装置 |
| JP4324766B2 (ja) * | 2003-03-27 | 2009-09-02 | スズキ株式会社 | 車両用自動変速制御装置 |
| JP2005009590A (ja) * | 2003-06-19 | 2005-01-13 | Toyota Motor Corp | 変速機の異常検出装置 |
-
2005
- 2005-04-25 JP JP2005126407A patent/JP4770253B2/ja not_active Expired - Fee Related
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101787249B1 (ko) | 2015-04-17 | 2017-10-18 | 도요타 지도샤(주) | 동력 전달 장치 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2006300284A (ja) | 2006-11-02 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR101371854B1 (ko) | 절연저항측정센서를 이용한 차량의 누전진단장치 및 이의 제어방법 | |
| KR101619597B1 (ko) | 후방 산소센서의 고장 검출 방법 | |
| KR100837968B1 (ko) | 자동차용 고전압 릴레이의 고장 진단방법 | |
| JP2013098170A (ja) | 親環境車両のメインリレーモニタリング装置および方法 | |
| CN101983151B (zh) | 提高可用性地控制混合驱动装置的电机的方法和装置 | |
| US20130002262A1 (en) | Vehicle-mounted system and insulation failure diagnosis unit | |
| JP6567935B2 (ja) | 車両用電源装置およびその故障検出方法 | |
| JP7172499B2 (ja) | 電子制御装置 | |
| JP4570909B2 (ja) | 電気加熱触媒の故障診断装置 | |
| JP2009077542A (ja) | 負荷駆動回路 | |
| JP5067359B2 (ja) | 電子制御システムの故障診断装置 | |
| CN107709101A (zh) | 车辆用控制装置 | |
| JP4770253B2 (ja) | 車両の故障診断方法及び装置 | |
| JP2012244895A (ja) | 電気自動車のコンバータ制御方法及びその装置 | |
| JP6334436B2 (ja) | 車両用相互監視モジュール | |
| KR102876202B1 (ko) | 차량용 로우 사이드 드라이버의 진단장치 및 그 제어방법 | |
| JP6220158B2 (ja) | リレー診断装置 | |
| CN112889212A (zh) | 电磁制动器控制装置和控制装置 | |
| JP6054723B2 (ja) | エンジン始動制御装置 | |
| CN111433070B (zh) | 用于运行电压转换器的方法和设备 | |
| US7269492B2 (en) | Control system | |
| CN108432109A (zh) | 当电路中存在过压或欠压时控制dc/dc转换器的控制装置 | |
| JP7853839B2 (ja) | 電動車両の診断装置 | |
| KR101271407B1 (ko) | 모터 구동 제어장치 및 그의 제어방법 | |
| CN113428015A (zh) | 电机控制系统和方法以及电动车辆 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20080407 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20101126 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20101130 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110131 |
|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20110131 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110301 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110419 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20110524 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20110606 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140701 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4770253 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |