JP4800351B2 - 車両用乗員保護システム - Google Patents
車両用乗員保護システム Download PDFInfo
- Publication number
- JP4800351B2 JP4800351B2 JP2008192215A JP2008192215A JP4800351B2 JP 4800351 B2 JP4800351 B2 JP 4800351B2 JP 2008192215 A JP2008192215 A JP 2008192215A JP 2008192215 A JP2008192215 A JP 2008192215A JP 4800351 B2 JP4800351 B2 JP 4800351B2
- Authority
- JP
- Japan
- Prior art keywords
- acceleration
- occupant protection
- value
- vehicle
- reference value
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Lifetime
Links
Images
















Landscapes
- Air Bags (AREA)
Description
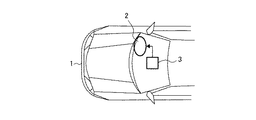
車両1が前方衝突による衝撃を受けると、乗員保護制御手段3の内部に設置された加速度センサが前記衝撃による加速度を検出し、その加速度検出信号をマイクロコンピュータに出力する。マイクロコンピュータは、前記加速度センサから入力した加速度検出信号に基づく演算を行ってエアバッグ2を展開すべきか否かを判定する。この際、エアバッグ2を展開すべきか否かの判定にあたっては、車両の減速度が重要となる。その減速度は、乗員保護制御手段3が加速度センサから入力信号による衝撃加速度検出値を時間積分することで算出されるが、実用上は、前記入力信号へのノイズ等によるオフセット成分が重畳するため、そのオフセット成分によって車両の通常走行時においても衝撃加速度の積算値が累積することとなる。
実施の形態1.
図1はこの発明の実施の形態1による車両用乗員保護装置の制御駆動システムを示す概略的なブロック図であり、図17と同一構成要素には同一符号を付して説明する。
図1において、2は車両1(図17参照)に搭載された乗員保護装置であって、スクイブ(起爆装置)2aと、これによって展開されるエアバッグ2bとからなっている。3は前記乗員保護装置2の制御手段であり、車両1の前部衝突時に生じる衝撃加速度を検出するための加速度センサ3aと、この加速度センサ3aから加速度検出信号をA/Dコンバータによりデジタルデータとして入力するマイクロコンピュータ3bと、このマイクロコンピュータ3bからの出力信号を入力して前記スクイブ2aに点火電流を供給する点火駆動装置3cとを備えた構成となっている。
車両1の走行時には加速度センサ3aによって衝撃加速度が常に検出され、その加速度検出信号をマイクロコンピュータ3bが入力して演算処理する。すなわち、マイクロコンピュータ3bは、加速度センサ3aから入力した加速度検出信号の大きさを演算してエアバッグ2bを展開すべきか否かを判定する。その判定において、車両の前方衝突時には加速度センサ3aからの入力信号による衝撃加速度が大きくなるので、この場合、マイクロコンピュータ3bからの出力信号で点火駆動装置3cが起動してスクイブ2aに点火電流が通電されることによりエアバッグ2bが展開される。
まず、車両の通常走行時において、加速度センサ3aが検出する衝撃加速度の絶対値は通常2G以下と小さい。従って、車両の通常走行時にマイクロコンピュータ3bが加速度センサ3aから入力する前記入力Gは、最小加速度基準値GLから最大加速度基準値GHの範囲となる。
前記ステップST1での判定結果がNoの場合、すなわち、入力GがGLからGHの範囲を超えた大きな衝撃加速度の場合にはステップST7に進む。ステップST7では、現時点での加速度積算値Vに入力Gを加算する。このような処理を実行することで、車両の通常走行時には常に加速度積算値Vが0に収束された状態から車両衝突等による大きな衝撃を受けた際の加速度積算値Vが積算される。この加速度積算値Vは、車両衝突速度が大きい場合、より大きな値となる。
車両が高速で衝突した場合と低速で衝突した場合とでは図3(a)に示すような衝撃加速度が発生する。ここで、車両の衝突速度は、衝撃加速度の時間積分によって算出され図3(b)に示すようになる。衝突の大きさは衝突速度の大きさにより評価される。
ラフロード走行時の衝撃加速度波形は図4(a)に示すように振幅の大きな振動波形である。この場合、図4(b)に示すように加速度積分は小さいことが特徴となる。
また、ブレーキング時の衝撃加速度波形は、図4(a)に示すように衝撃加速度発生が小さくなる。ただし、加速度積分は、図4(b)のように大きいことが特徴である。このような入力に対して、前記フローチャートに従った演算では、入力された衝撃加速度Gが前記最小加速度基準値GLと前記最大加速度基準値GHとの間にあるため、加速度積算は実施されず、加速度積算値Vは0を保持する。この結果、加速度積算値Vは駆動信号出力閾値Vthrを超えることはなく、乗員保護装置の駆動信号は出力されない。
図6はこの発明の実施の形態2による乗員保護システムを搭載した車両の前部平面図、図7は図6の乗員保護システムのブロック図であり、図1および図17と同一構成要素には同一符号を付して説明する。
図6において、1は車両、2は車両1に搭載された前方衝突用乗員保護装置、
4は同じく車両1に搭載された後方衝突用乗員保護装置、3は前方衝突用乗員保護装置2および後方衝突用乗員保護装置4を駆動する共通の制御手段である。この制御手段3は、図7に示すように、車両1の衝突時に生じる衝撃加速度を検出するための加速度センサ3aと、この加速度センサ3aから加速度検出信号をA/Dコンバータによりデジタルデータとして入力するマイクロコンピュータ3bと、このマイクロコンピュータ3bからの出力信号を入力して前方衝突用乗員保護装置2および後方衝突用乗員保護装置4をそれぞれ駆動する前方衝突用駆動装置3dおよび後方衝突用駆動装置3eとを備えた構成となっている。ここで、前記前方衝突用乗員保護装置2は一例としてエアバッグが挙げられ、後方衝突用乗員保護装置4は一例としてヘッドレストのような鞭打ち防止装置が挙げられる。なお、前記マイクロコンピュータ3bのメモリには、駆動信号出力閾値Vthr2が予め設定されているものである。
この実施の形態2によるマイクロコンピュータ3bでは、加速度センサ3aから入力した衝撃加速度検出信号の大きさを物理的に演算し、前方衝突用乗員保護装置2および後方衝突用乗員保護装置4の駆動制御を決定する。その決定に基づいて前方衝突用乗員保護装置2を駆動すべき大きな衝撃加速度が入力された場合には、前方衝突用駆動装置3dが前方衝突用乗員保護装置2に駆動信号を出力して前方衝突用乗員保護装置2を駆動する。同様にして、後方衝突用乗員保護装置4を駆動すべき大きな衝撃加速度が入力された場合には、後方衝突用駆動装置3eが後方衝突用乗員保護装置4に駆動信号を出力して後方衝突用乗員保護装置4を駆動する。
このような演算処理を実行することで、車両の後方衝突に対しても衝撃の大きさを判定することが可能となる。なお、前方衝突については前記実施の形態1と同様の演算処理を実行される。
車両が高速で衝突した場合と低速で衝突した場合とでは図9(a)に示すような衝撃加速度が発生する。ここで、車両の衝突速度は、衝撃加速度の時間積分によって算出され図9(b)に示すようになる。衝突の大きさは衝突速度の大きさにより評価される。
図10はこの発明の実施の形態3による乗員保護システムを搭載した車両の前部平面図、図11は図10の乗員保護システムのブロック図であり、図1から図9および図17と同一構成要素には同一符号を付して重複説明を省略する。
図10において、5は車両1に搭載された右方衝突用乗員保護装置、6は同じく車両1に搭載された左方衝突用乗員保護装置である。
この実施の形態3によるマイクロコンピュータ3bでは、加速度センサ3aから入力した衝撃加速度検出信号の大きさを物理的に演算し、右方衝突用乗員保護装置5および左方衝突用乗員保護装置6の駆動制御を決定する。その決定に基づいて右方衝突用乗員保護装置5を駆動すべき大きな衝撃加速度が入力された場合には、右方衝突用駆動装置3fが右方衝突用乗員保護装置5に駆動信号を出力して右方衝突用乗員保護装置5を駆動する。同様にして、左方衝突用乗員保護装置6を駆動すべき大きな衝撃加速度が入力された場合には、左方衝突用駆動装置3gが左方衝突用乗員保護装置6に駆動信号を出力して左方衝突用乗員保護装置6を駆動する。この実施の形態3において、前記マイクロコンピュータ3bのメモリには、右方衝突用乗員保護装置5および左方衝突用乗員保護装置6を駆動すべき駆動信号出力閾値VthrRが予め設定されているものである。
このような演算処理を実行することで、車両の左右方向の衝突に対しても衝撃の大きさを判定することが可能となる。
した場合のエアバッグ駆動信号出力タイミング等については、前記実施の形態2の場合と同様のため説明を省略するが、加速度積算値Vが各閾値の範囲を超えて乗員保護装置の駆動信号が出力され、乗員保護装置を作動させる必要がない形態入力に対して、加速度積算値Vが各閾値の範囲内にあるため乗員保護装置の駆動信号は出力されない。
図13はこの発明の実施の形態4による車両用乗員保護システムに適用されるマイクロコンピュータの制御動作を説明するためのフローチャートであり、図2と同一または相当のステップには同一符号を付して重複説明を省略する。
ステップST1からステップST11については前記実施の形態1で説明したものと同様の処理が実行されるために説明は省略し、より早期にラフロード走行時の衝突との衝突を識別するための追加ステップST18およびステップST19についてのみ説明する。
乗員保護装置を作動させる必要がある車両衝突時の衝撃加速度波形、および乗員保護装置を作動させる必要がないラフロード走行時の波形は、図14(a)に示すようになる。車両衝突時の衝撃加速度波形は正(減速)成分が主体であり、図14(b)に示すように加速度積分が大きいことが特徴となる。
一方、ラフロード走行時の衝撃加速度波形は図14に示すように振幅が大きな振動波形であり、図14(b)のように加速度積分は小さいことが特徴となる。
図15はこの発明の実施の形態5による車両用乗員保護システムに適用されるマイクロコンピュータの制御動作を説明するためのフローチャートであり、図2と同一または相当のステップには同一符号を付して重複説明を省略する。
ステップST1からステップST11については前記実施の形態1で説明したものと同様の処理が実行されるために説明は省略し、加速度積算値を復帰させるための復帰処理を遅延させるタイマ処理のために追加したステップST20,ステップST21,ステップST22についてのみ説明する。
一方、前記入力Gが前記積算値復帰加速度範囲GL〜GHを超えない場合には、ステップST20の処理が実行される。ステップST20では、時間カウンタTからサンプリング時間Δtを減算してステップST21に進む。ステップST21では、前記減算された時間カウンタTを評価し、0以下となった場合にはステップST2に進んで加速度積算値Vを0に収束させる処理が実行される。時間カウンタTが0以上の場合は加速度積算値Vがそのまま保持されてステップST10に進む。
このような処理ステップを追加することで、加速度積算値Vの復帰処理(加速度積算値を0に収束させる)タイミングを調整できる。
前記実施の形態1から実施の形態4では、衝突時の衝撃加速度が連続発生するケースについて説明したが、実際の衝突では車両の衝突モードにより衝撃加速度波形が異なるほか、車両の各構成部品のレイアウトにより同じ衝突形態においても衝撃加速度は異なる。
図16(a)のように衝撃加速度波形の第1波と第2波との発生Gが小さい領域が発生するような車両および衝突形態について説明する。
図16(a)のような衝撃加速度波形の場合、加速度積分は図16(b)のようになる。
図16(c1)は、前記実施の形態1から前記実施の形態4の演算を適用した場合の演算モードについて記載したもので、積算値復帰加速度範囲GL〜GHを超える場合は積算処理が実行され、積算値復帰加速度範囲GL〜GH以内の場合は積算値の復帰処理(加速度積算値を0に収束させる)タイミングを示している。
Claims (4)
- 車両に搭載された乗員保護装置と、車両衝突時の衝撃による加速度を検出する加速度センサを有し、この加速度センサから加速度信号を入力して前記乗員保護装置を制御駆動する乗員保護制御手段とを備えた車両用乗員保護システムにおいて、
前記乗員保護制御手段は、前記加速度信号に基づく物理量を演算し、車両の通常走行時の前記物理量の最大基準値および最小基準値をあらかじめ設定し、その物理量が前記最大基準値から前記最小基準値の範囲内のとき、加速度積算値が正の値のときにその加速度積算値から、現時点での加速度積算値に対して予め設定された積算基準値の減算を実行し、前記物理量が前記最大基準値から前記最小基準値の範囲内のとき、加速度積算値が負の値のときにその加速度積算値から、現時点での加速度積算値に対して予め設定された積算基準値の加算を実行する機能を有することを特徴とする車両用乗員保護システム。 - 加速度センサは、その検出方向が車両前後方向となるように設置され、その加速度センサの正成分側を車両の前方向もしくは後方向とし、加速度センサの負成分側を前記正成分側とは逆方向とし、乗員保護制御手段は、前記加速度センサから入力する加速度信号に基づく加速度積算値が正成分側に設定された加速度積算値の基準値を超えたときに正成分側の乗員保護装置を駆動し、前記加速度積算値が負成分側に設定された加速度積算値の基準値を下回るときに負成分側の乗員保護装置を駆動する機能を有していることを特徴とする請求項1記載の車両用乗員保護システム。
- 加速度センサは、その検出方向が車両左右方向となるように設置され、その加速度センサの正成分側を車両の左方向もしくは右方向とし、加速度センサの負成分側を前記正成分側とは逆方向とし、乗員保護制御手段は、前記加速度センサから入力する加速度信号に基づく加速度積算値が正成分側に設定された加速度積算値の基準値を超えたときに正成分側の乗員保護装置を駆動し、前記加速度積算値が負成分側に設定された加速度積算値の基準値を下回るときに負成分側の乗員保護装置を駆動する機能を有していることを特徴とする請求項1記載の車両用乗員保護システム。
- 乗員保護制御手段は、前記加速度信号に基づく物理量を演算し、車両の通常走行時の前記物理量の最大基準値および最小基準値をあらかじめ設定し、その物理量が前記最大基準値から前記最小基準値の範囲外のとき、加速度を積算する演算を実行し加速度積算値を算出し、前記物理量が前記最大基準値から前記最小基準値の範囲内のとき、その範囲を前記物理量が超えてからの時間を計測し、その計測時間が所定時間よりも小さいときに前記加速度積算値の復帰を延期する機能を有することを特徴とする請求項1記載の車両用乗員保護システム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008192215A JP4800351B2 (ja) | 2008-07-25 | 2008-07-25 | 車両用乗員保護システム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008192215A JP4800351B2 (ja) | 2008-07-25 | 2008-07-25 | 車両用乗員保護システム |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2001142151A Division JP4416961B2 (ja) | 2001-05-11 | 2001-05-11 | 車両用乗員保護システム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2008254734A JP2008254734A (ja) | 2008-10-23 |
| JP4800351B2 true JP4800351B2 (ja) | 2011-10-26 |
Family
ID=39978720
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008192215A Expired - Lifetime JP4800351B2 (ja) | 2008-07-25 | 2008-07-25 | 車両用乗員保護システム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4800351B2 (ja) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5155936B2 (ja) * | 2009-05-22 | 2013-03-06 | トヨタ自動車株式会社 | 衝突判定装置、及び、乗員保護装置の起動制御装置 |
| JP6597401B2 (ja) * | 2016-03-01 | 2019-10-30 | 株式会社デンソー | 衝突判定装置 |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2776161B2 (ja) * | 1992-08-04 | 1998-07-16 | トヨタ自動車株式会社 | 衝突検出装置 |
| JP3768268B2 (ja) * | 1995-07-11 | 2006-04-19 | オートリブ・ジャパン株式会社 | 車両の側面衝突判別装置 |
| JP4003003B2 (ja) * | 1997-12-27 | 2007-11-07 | オートリブ・ジャパン株式会社 | 側突用エアバッグ装置 |
| JPH11198699A (ja) * | 1998-01-19 | 1999-07-27 | Toyota Motor Corp | 車両用最後部シート |
| JP3991295B2 (ja) * | 1998-05-28 | 2007-10-17 | マツダ株式会社 | 車両衝突時のステアリング制御装置 |
-
2008
- 2008-07-25 JP JP2008192215A patent/JP4800351B2/ja not_active Expired - Lifetime
Also Published As
| Publication number | Publication date |
|---|---|
| JP2008254734A (ja) | 2008-10-23 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4416961B2 (ja) | 車両用乗員保護システム | |
| US7416042B2 (en) | Method for triggering a two-stage belt tensioner | |
| US6438475B1 (en) | Crash detection system | |
| CN104812630B (zh) | 使用多区域增强辨别控制可致动限制装置的方法和设备 | |
| KR100196452B1 (ko) | 충돌센서 | |
| US20120072078A1 (en) | Collision determining apparatus for vehicle | |
| JPH04361163A (ja) | 車両衝突検知装置 | |
| US6324454B1 (en) | Activation control apparatus of occupant safety | |
| CN100415572C (zh) | 人身保护机构致动的方法 | |
| US20060064220A1 (en) | Object struck discrimination system and protection system | |
| KR102558602B1 (ko) | 차량의 에어백 전개 제어 장치 및 방법 | |
| JP4800351B2 (ja) | 車両用乗員保護システム | |
| JP4918503B2 (ja) | 横方向速度を用いた側面衝突の妥当性 | |
| US20100256873A1 (en) | Method and control unit for triggering occupant protection means for a vehicle | |
| JP2004536742A (ja) | 車両衝撃検知システム及び制御方法 | |
| CN100404321C (zh) | 用于控制汽车中乘客保护设备的方法 | |
| US20060064219A1 (en) | Object struck discrimination system and protection system | |
| JP2005106664A (ja) | 加速度検出装置及びこれを用いた乗員保護システム | |
| JP2019027833A (ja) | 衝突検知装置 | |
| KR102928633B1 (ko) | 에어백 전개 장치 및 방법 | |
| US8108107B2 (en) | Safety system | |
| US7376502B2 (en) | Device for triggering a restraining system in a vehicle | |
| JP3118980B2 (ja) | 車両の衝突判定装置 | |
| JP5511528B2 (ja) | 車両の前方衝突加速度センサの衝突信号処理装置 | |
| JP2008534365A (ja) | 歩行者保護システムのための判別方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20080725 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20101224 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110104 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110217 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20110726 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20110803 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140812 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4800351 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| EXPY | Cancellation because of completion of term |