JP4806548B2 - マイクロ流路の流体制御構造、マイクロ流路の流体制御構造の製造方法、および閉塞部材操作装置 - Google Patents
マイクロ流路の流体制御構造、マイクロ流路の流体制御構造の製造方法、および閉塞部材操作装置 Download PDFInfo
- Publication number
- JP4806548B2 JP4806548B2 JP2005263112A JP2005263112A JP4806548B2 JP 4806548 B2 JP4806548 B2 JP 4806548B2 JP 2005263112 A JP2005263112 A JP 2005263112A JP 2005263112 A JP2005263112 A JP 2005263112A JP 4806548 B2 JP4806548 B2 JP 4806548B2
- Authority
- JP
- Japan
- Prior art keywords
- valve
- flow path
- microchip
- hole
- fluid control
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 239000012530 fluid Substances 0.000 title claims description 138
- 238000000034 method Methods 0.000 title claims description 20
- 238000004519 manufacturing process Methods 0.000 title claims description 15
- 239000000758 substrate Substances 0.000 claims description 126
- 239000000463 material Substances 0.000 claims description 62
- 230000002093 peripheral effect Effects 0.000 claims description 46
- 230000000903 blocking effect Effects 0.000 claims description 36
- 239000000945 filler Substances 0.000 claims description 25
- 230000007797 corrosion Effects 0.000 claims description 19
- 238000005260 corrosion Methods 0.000 claims description 19
- 230000000149 penetrating effect Effects 0.000 claims description 4
- 239000011347 resin Substances 0.000 claims description 4
- 229920005989 resin Polymers 0.000 claims description 4
- 238000005192 partition Methods 0.000 claims description 3
- 239000000523 sample Substances 0.000 description 128
- 238000003825 pressing Methods 0.000 description 72
- 238000004458 analytical method Methods 0.000 description 28
- 239000010408 film Substances 0.000 description 27
- 239000000853 adhesive Substances 0.000 description 24
- 230000001070 adhesive effect Effects 0.000 description 24
- 230000000694 effects Effects 0.000 description 19
- 230000005489 elastic deformation Effects 0.000 description 16
- 239000011521 glass Substances 0.000 description 15
- 239000007788 liquid Substances 0.000 description 14
- 101100127688 Saccharomyces cerevisiae (strain ATCC 204508 / S288c) FAA1 gene Proteins 0.000 description 12
- 229920003023 plastic Polymers 0.000 description 12
- 239000004033 plastic Substances 0.000 description 12
- 101000934489 Homo sapiens Nucleosome-remodeling factor subunit BPTF Proteins 0.000 description 11
- 101100326803 Neurospora crassa (strain ATCC 24698 / 74-OR23-1A / CBS 708.71 / DSM 1257 / FGSC 987) fac-2 gene Proteins 0.000 description 11
- 102100025062 Nucleosome-remodeling factor subunit BPTF Human genes 0.000 description 11
- 238000006243 chemical reaction Methods 0.000 description 10
- 238000001514 detection method Methods 0.000 description 10
- 238000006073 displacement reaction Methods 0.000 description 10
- 238000002347 injection Methods 0.000 description 10
- 239000007924 injection Substances 0.000 description 10
- -1 polyethylene Polymers 0.000 description 10
- 230000002829 reductive effect Effects 0.000 description 10
- 239000000919 ceramic Substances 0.000 description 9
- 229920000139 polyethylene terephthalate Polymers 0.000 description 9
- 239000005020 polyethylene terephthalate Substances 0.000 description 9
- 238000012545 processing Methods 0.000 description 8
- XUIMIQQOPSSXEZ-UHFFFAOYSA-N Silicon Chemical compound [Si] XUIMIQQOPSSXEZ-UHFFFAOYSA-N 0.000 description 7
- 230000015572 biosynthetic process Effects 0.000 description 7
- 230000001276 controlling effect Effects 0.000 description 7
- 238000011160 research Methods 0.000 description 7
- 239000010703 silicon Substances 0.000 description 7
- 229910052710 silicon Inorganic materials 0.000 description 7
- 238000003786 synthesis reaction Methods 0.000 description 7
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 7
- 229920001971 elastomer Polymers 0.000 description 6
- 238000005304 joining Methods 0.000 description 6
- 238000012986 modification Methods 0.000 description 6
- 230000004048 modification Effects 0.000 description 6
- 238000011144 upstream manufacturing Methods 0.000 description 6
- JOYRKODLDBILNP-UHFFFAOYSA-N Ethyl urethane Chemical compound CCOC(N)=O JOYRKODLDBILNP-UHFFFAOYSA-N 0.000 description 5
- 229920000459 Nitrile rubber Polymers 0.000 description 5
- 239000004743 Polypropylene Substances 0.000 description 5
- 101100127690 Saccharomyces cerevisiae (strain ATCC 204508 / S288c) FAA2 gene Proteins 0.000 description 5
- 101100127692 Saccharomyces cerevisiae (strain ATCC 204508 / S288c) FAA4 gene Proteins 0.000 description 5
- 230000000740 bleeding effect Effects 0.000 description 5
- 239000002783 friction material Substances 0.000 description 5
- 229910052751 metal Inorganic materials 0.000 description 5
- 239000002184 metal Substances 0.000 description 5
- 230000003287 optical effect Effects 0.000 description 5
- 229920001296 polysiloxane Polymers 0.000 description 5
- 239000010980 sapphire Substances 0.000 description 5
- 229910052594 sapphire Inorganic materials 0.000 description 5
- 229910001220 stainless steel Inorganic materials 0.000 description 5
- 239000010935 stainless steel Substances 0.000 description 5
- 239000000126 substance Substances 0.000 description 5
- YCKRFDGAMUMZLT-UHFFFAOYSA-N Fluorine atom Chemical compound [F] YCKRFDGAMUMZLT-UHFFFAOYSA-N 0.000 description 4
- 230000008859 change Effects 0.000 description 4
- 230000003749 cleanliness Effects 0.000 description 4
- PMHQVHHXPFUNSP-UHFFFAOYSA-M copper(1+);methylsulfanylmethane;bromide Chemical compound Br[Cu].CSC PMHQVHHXPFUNSP-UHFFFAOYSA-M 0.000 description 4
- 238000000605 extraction Methods 0.000 description 4
- 229910052731 fluorine Inorganic materials 0.000 description 4
- 239000011737 fluorine Substances 0.000 description 4
- 238000003780 insertion Methods 0.000 description 4
- 230000037431 insertion Effects 0.000 description 4
- 238000003754 machining Methods 0.000 description 4
- 239000003921 oil Substances 0.000 description 4
- TWNQGVIAIRXVLR-UHFFFAOYSA-N oxo(oxoalumanyloxy)alumane Chemical compound O=[Al]O[Al]=O TWNQGVIAIRXVLR-UHFFFAOYSA-N 0.000 description 4
- 229920001084 poly(chloroprene) Polymers 0.000 description 4
- 229920001155 polypropylene Polymers 0.000 description 4
- 229920002379 silicone rubber Polymers 0.000 description 4
- 239000004945 silicone rubber Substances 0.000 description 4
- 239000007779 soft material Substances 0.000 description 4
- 102100038028 1-phosphatidylinositol 3-phosphate 5-kinase Human genes 0.000 description 3
- 101100257994 Arabidopsis thaliana FAB2 gene Proteins 0.000 description 3
- 101001025044 Homo sapiens 1-phosphatidylinositol 3-phosphate 5-kinase Proteins 0.000 description 3
- 239000004698 Polyethylene Substances 0.000 description 3
- HEMHJVSKTPXQMS-UHFFFAOYSA-M Sodium hydroxide Chemical compound [OH-].[Na+] HEMHJVSKTPXQMS-UHFFFAOYSA-M 0.000 description 3
- 238000010586 diagram Methods 0.000 description 3
- 238000003891 environmental analysis Methods 0.000 description 3
- 229920000573 polyethylene Polymers 0.000 description 3
- 239000004065 semiconductor Substances 0.000 description 3
- UFWIBTONFRDIAS-UHFFFAOYSA-N Naphthalene Chemical compound C1=CC=CC2=CC=CC=C21 UFWIBTONFRDIAS-UHFFFAOYSA-N 0.000 description 2
- 239000004642 Polyimide Substances 0.000 description 2
- 101100127691 Saccharomyces cerevisiae (strain ATCC 204508 / S288c) FAA3 gene Proteins 0.000 description 2
- VYPSYNLAJGMNEJ-UHFFFAOYSA-N Silicium dioxide Chemical compound O=[Si]=O VYPSYNLAJGMNEJ-UHFFFAOYSA-N 0.000 description 2
- PPBRXRYQALVLMV-UHFFFAOYSA-N Styrene Chemical compound C=CC1=CC=CC=C1 PPBRXRYQALVLMV-UHFFFAOYSA-N 0.000 description 2
- BZHJMEDXRYGGRV-UHFFFAOYSA-N Vinyl chloride Chemical compound ClC=C BZHJMEDXRYGGRV-UHFFFAOYSA-N 0.000 description 2
- XAGFODPZIPBFFR-UHFFFAOYSA-N aluminium Chemical compound [Al] XAGFODPZIPBFFR-UHFFFAOYSA-N 0.000 description 2
- 239000011248 coating agent Substances 0.000 description 2
- 238000000576 coating method Methods 0.000 description 2
- 230000006835 compression Effects 0.000 description 2
- 238000007906 compression Methods 0.000 description 2
- 230000006866 deterioration Effects 0.000 description 2
- 238000007599 discharging Methods 0.000 description 2
- 238000005553 drilling Methods 0.000 description 2
- 238000005530 etching Methods 0.000 description 2
- 229920001973 fluoroelastomer Polymers 0.000 description 2
- 230000004927 fusion Effects 0.000 description 2
- 238000007654 immersion Methods 0.000 description 2
- 238000001746 injection moulding Methods 0.000 description 2
- 230000010354 integration Effects 0.000 description 2
- 229910052451 lead zirconate titanate Inorganic materials 0.000 description 2
- 150000002739 metals Chemical class 0.000 description 2
- 238000002156 mixing Methods 0.000 description 2
- 238000009832 plasma treatment Methods 0.000 description 2
- 229920003229 poly(methyl methacrylate) Polymers 0.000 description 2
- 229920001721 polyimide Polymers 0.000 description 2
- 239000004926 polymethyl methacrylate Substances 0.000 description 2
- 238000005488 sandblasting Methods 0.000 description 2
- 230000035945 sensitivity Effects 0.000 description 2
- 238000000638 solvent extraction Methods 0.000 description 2
- 238000013519 translation Methods 0.000 description 2
- 238000002834 transmittance Methods 0.000 description 2
- 238000007514 turning Methods 0.000 description 2
- RZVAJINKPMORJF-UHFFFAOYSA-N Acetaminophen Chemical compound CC(=O)NC1=CC=C(O)C=C1 RZVAJINKPMORJF-UHFFFAOYSA-N 0.000 description 1
- DGAQECJNVWCQMB-PUAWFVPOSA-M Ilexoside XXIX Chemical compound C[C@@H]1CC[C@@]2(CC[C@@]3(C(=CC[C@H]4[C@]3(CC[C@@H]5[C@@]4(CC[C@@H](C5(C)C)OS(=O)(=O)[O-])C)C)[C@@H]2[C@]1(C)O)C)C(=O)O[C@H]6[C@@H]([C@H]([C@@H]([C@H](O6)CO)O)O)O.[Na+] DGAQECJNVWCQMB-PUAWFVPOSA-M 0.000 description 1
- 239000002033 PVDF binder Substances 0.000 description 1
- 239000004809 Teflon Substances 0.000 description 1
- 229920006362 Teflon® Polymers 0.000 description 1
- RTAQQCXQSZGOHL-UHFFFAOYSA-N Titanium Chemical compound [Ti] RTAQQCXQSZGOHL-UHFFFAOYSA-N 0.000 description 1
- 238000002835 absorbance Methods 0.000 description 1
- 238000009825 accumulation Methods 0.000 description 1
- 230000004913 activation Effects 0.000 description 1
- 239000013466 adhesive and sealant Substances 0.000 description 1
- 230000002411 adverse Effects 0.000 description 1
- 230000001174 ascending effect Effects 0.000 description 1
- 239000012298 atmosphere Substances 0.000 description 1
- JRPBQTZRNDNNOP-UHFFFAOYSA-N barium titanate Chemical compound [Ba+2].[Ba+2].[O-][Ti]([O-])([O-])[O-] JRPBQTZRNDNNOP-UHFFFAOYSA-N 0.000 description 1
- 229910002113 barium titanate Inorganic materials 0.000 description 1
- 239000011324 bead Substances 0.000 description 1
- 238000005219 brazing Methods 0.000 description 1
- 239000003990 capacitor Substances 0.000 description 1
- 238000004113 cell culture Methods 0.000 description 1
- 239000003795 chemical substances by application Substances 0.000 description 1
- 238000004587 chromatography analysis Methods 0.000 description 1
- 150000001875 compounds Chemical class 0.000 description 1
- 238000001816 cooling Methods 0.000 description 1
- 239000013078 crystal Substances 0.000 description 1
- 238000005520 cutting process Methods 0.000 description 1
- 238000013461 design Methods 0.000 description 1
- 238000011161 development Methods 0.000 description 1
- 230000018109 developmental process Effects 0.000 description 1
- NKZSPGSOXYXWQA-UHFFFAOYSA-N dioxido(oxo)titanium;lead(2+) Chemical compound [Pb+2].[O-][Ti]([O-])=O NKZSPGSOXYXWQA-UHFFFAOYSA-N 0.000 description 1
- 238000003618 dip coating Methods 0.000 description 1
- 230000003028 elevating effect Effects 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 230000002349 favourable effect Effects 0.000 description 1
- 238000011049 filling Methods 0.000 description 1
- 238000012921 fluorescence analysis Methods 0.000 description 1
- 230000020169 heat generation Effects 0.000 description 1
- 238000010438 heat treatment Methods 0.000 description 1
- 238000010348 incorporation Methods 0.000 description 1
- 238000007373 indentation Methods 0.000 description 1
- 230000002401 inhibitory effect Effects 0.000 description 1
- 239000011810 insulating material Substances 0.000 description 1
- 230000002452 interceptive effect Effects 0.000 description 1
- JQJCSZOEVBFDKO-UHFFFAOYSA-N lead zinc Chemical compound [Zn].[Pb] JQJCSZOEVBFDKO-UHFFFAOYSA-N 0.000 description 1
- HFGPZNIAWCZYJU-UHFFFAOYSA-N lead zirconate titanate Chemical compound [O-2].[O-2].[O-2].[O-2].[O-2].[Ti+4].[Zr+4].[Pb+2] HFGPZNIAWCZYJU-UHFFFAOYSA-N 0.000 description 1
- 230000031700 light absorption Effects 0.000 description 1
- 239000007791 liquid phase Substances 0.000 description 1
- GQYHUHYESMUTHG-UHFFFAOYSA-N lithium niobate Chemical compound [Li+].[O-][Nb](=O)=O GQYHUHYESMUTHG-UHFFFAOYSA-N 0.000 description 1
- 125000005010 perfluoroalkyl group Chemical group 0.000 description 1
- 230000035699 permeability Effects 0.000 description 1
- 239000012071 phase Substances 0.000 description 1
- 229920000642 polymer Polymers 0.000 description 1
- 239000002861 polymer material Substances 0.000 description 1
- 229920002981 polyvinylidene fluoride Polymers 0.000 description 1
- 230000008569 process Effects 0.000 description 1
- 238000005086 pumping Methods 0.000 description 1
- 239000005297 pyrex Substances 0.000 description 1
- 238000004451 qualitative analysis Methods 0.000 description 1
- 238000011002 quantification Methods 0.000 description 1
- 230000001105 regulatory effect Effects 0.000 description 1
- 230000002940 repellent Effects 0.000 description 1
- 239000005871 repellent Substances 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 229910052706 scandium Inorganic materials 0.000 description 1
- SIXSYDAISGFNSX-UHFFFAOYSA-N scandium atom Chemical compound [Sc] SIXSYDAISGFNSX-UHFFFAOYSA-N 0.000 description 1
- 239000000565 sealant Substances 0.000 description 1
- 229910052708 sodium Inorganic materials 0.000 description 1
- 239000011734 sodium Substances 0.000 description 1
- 239000000243 solution Substances 0.000 description 1
- 238000004528 spin coating Methods 0.000 description 1
- 238000005507 spraying Methods 0.000 description 1
- 230000002194 synthesizing effect Effects 0.000 description 1
- 239000010409 thin film Substances 0.000 description 1
- 239000010936 titanium Substances 0.000 description 1
- 229910052719 titanium Inorganic materials 0.000 description 1
- 239000002699 waste material Substances 0.000 description 1
Images

































Landscapes
- Micromachines (AREA)
- Electrically Driven Valve-Operating Means (AREA)
- Indication Of The Valve Opening Or Closing Status (AREA)
Description
これらのマイクロチップを用いた研究では、マイクロチップ内の流体の流速や流体圧力を適切に制御する必要がある。
ここで、マイクロチップの流路は、例えば、一方の基板に溝を形成し、この溝に他方の基板の板面を重ねることで形成されたもので、この流路における流体を制御するために、軟質材料で形成された基板を外部から押圧して流路を塞ぐという方法がある(特許文献1および特許文献2参照)。具体的に、特許文献1では、軟質材料であるシリコーンゴム、ニトリルゴム等で形成された基板に流路の溝が形成され、溝の途中に溝幅よりも大きい円形状に形成された空隙の部分を、この基板に重ねた他の基板を介して押圧し、空隙の断面積を変化させることによってバルブ機能を実現している。また、特許文献2では、ポリイミド、ポリエチレン等の可撓性可鍛高分子物質による2枚の薄板(パウチ)間に流路が形成され、薄板の上には、流路に向かって突出するブレードを保持する弁ハウジングが設けられ、ブレードをアクチュエータで進退させて薄板を押圧することで流路を閉塞している。
なお、特許文献4では、この基板間にダイアフラムが介装された構造を、流体圧力や流速を調節するバルブのみならず、流体を送り出すポンプとしても使用している。
なお、マイクロチップを操作するための装置としては、操作装置内に2つ以上に分割した流体デバイスを持ち、それらをペアとして1つの流体デバイスとし、マイクロチップに流す流体を制御できる装置が提案されていた(特許文献5)。
一方、特許文献3および特許文献4のバルブやポンプ構造では、基板に硬質材料を使用することはできるが、流路内が高圧となった際の負荷がダイアフラムに集中するため耐圧性に問題があるとともに、分析装置などの投射光をダイアフラムシートが光吸収するため、分析の感度が低下するおそれがある。
このように、従来、ガラスなどの基板材料で形成されたマイクロチップの内部の流路を閉塞するバルブやポンプとして有用なものはなく、その実現が強く望まれていた。
また、特許文献5の構成は、操作装置内に2つ以上に分割した流体デバイスをペアとしてマイクロチップに流す流体を制御するものの、マイクロチップ内に埋め込んだ部品と、操作装置内の部品とをペアとして動作させるものとはなっていない。
なお、マイクロチップに形成されたマイクロ流路は、例えば、溝が形成された一方の基板に他方の基板を重ねることにより、溝の内周面と他方の基板の板面との間に形成することができる。この場合、前記の孔は、他方の基板を貫通するように形成されている。
前記部材本体の硬質材料としては、ガラス、サファイア、プラスチック、珪素および、酸化アルミニウム、窒化アルミニウムなどのセラミックス、あるいはステンレスなどの金属などを使用できる。
このような部材本体の流路側の面および孔の内周面の少なくとも1つの面に、弾性部材が塗布や貼り付けなどの方法で設けられている。
また、マイクロチップには、流路に連通する孔を形成するだけで済み、ポンプ室などを形成する場合を除いては、基板を変形させて流路を閉塞する場合のように流路を閉塞するためだけに空隙部(流体の溜まり部)などを設ける必要もないから、マイクロチップの構造を簡略にできるとともに、デッドボリュームを少なくできる。
さらに、基板の間に挟んだ薄膜部材により流路を閉塞する構造などと異なり、マイクロチップにおいて、閉塞部材が配設された部分以外に弾性部材がないため、光吸収率を小さくでき、光学分析の感度低下を防止することができる。
なお、弾性部材の厚さ(孔の軸方向での寸法)を大きくするほど、弾性変形による閉塞量を大きくでき、流路の断面積(深さ・幅)が大きくても閉塞できる。
この弾性部材の材料としては、フッ素ゴム、シリコーンゴム、ニトリルゴム、クロロプレンゴム、ウレタンなどを採用することができる。
ここで、硬質材料としては、ガラス(石英ガラスを含む。以下同じ)、サファイア、プラスチック、珪素(シリコン)および、酸化アルミニウム、窒化アルミニウムなどのセラミックス、あるいはステンレスなどの金属などを使用できる。硬質であるからハンドリング性が良く、また、硬質材料にはガラス、サファイア、セラミックなどの高耐食性のものが多いため、高耐食性の材料を選択することにより、信頼性および汎用性を向上させることができる。
また、この発明によれば、流路内が高圧となってもマイクロチップが撓まず、閉塞部材が孔の内周面に確実に保持されるので、耐圧性を向上させることができる。
さらに、高耐食性の硬質材料を部材本体に使用することにより、信頼性および汎用性を向上させることができる。
この発明によれば、弾性部材および部材本体がそれぞれ均一な厚さに設けられているため、流量などを調節するにあたり、安定した閉塞量を実現できる。また、閉塞部材が流路を閉塞しない状態に配設される場合は、弾性部材の流路側の表面が波打つように変形することを防止できるので、流体の流れが阻害されない。
この発明によれば、平坦な弾性部材が孔の周縁および流路の壁部に隙間無く密接し、デッドボリュームを小さくできる。これにより、閉塞部材の配設部分に気泡が生じて流体の流れに影響が及ぶことがなく、液量がくるうこともない。また、気泡が生じないので、送液圧力が安定化され、流体の流れに影響が及ばない。
さらに、閉塞部材の配設部分に試料が残り、マイクロチップの清浄度を確保できないなどの問題を回避できる。
この発明によれば、堰部が流路に配置され、流路を確実に塞ぐことができるため、安全弁として好適な構成にできる。安全弁が機能する所定圧力の大小は、堰部の大きさや、閉塞部材と流路との嵌め合いで決められる。なお、このように弾性部材の一部に流路形状に対応した堰部を形成することにより、閉塞部材全体を流路の幅寸法と同様に小さくする場合と比べて作りこみを容易にできる。
なお、堰部を形成する方法としては、半導体製造プロセスにおける微細加工などを利用できる。
この発明によれば、孔に挿入された閉塞部材が孔の内側で流路の幅方向端部に支持され、閉塞部材に外力を印加しない状態で流路壁面と閉塞部材の表面とをほぼ同一面上に揃えることができる。これにより、流路を閉塞しない状態において、閉塞部材が流体の流れに影響を及ぼすことを防止できる。
ここで、延性および弾性を有する充填剤としては、シリコーン系の充填剤やフッ素ゴム、ニトリルゴム、クロロプレンゴム、ウレタンなどによる接着剤やシール剤などを例示できる。この充填剤の介装により、閉塞部材をマイクロチップの孔に固定することが可能である。
この発明によれば、充填剤の適度な粘性により、介装時に充填剤が流路の中に流入するのを防止できるとともに、充填剤の硬化後は、その延性および弾性により、充填剤が弾性部材に追従するため、弾性部材の弾性変形が阻害されることがない。
なお、介装時における充填剤の粘性は、1000〜100000cpの範囲が良好である。
この発明によれば、閉塞部材を孔に押し込む力や押し込み量によって流体の流れの制御が可能となるので、適材適所の流体操作をすることができる。流体の制御としては、流体の状態量の変動を制御するほか、所定の圧力、所定の流量に応じて任意の状態量に制御する場合などがある。なお、マイクロチップには、複数の閉塞部材を配置することができる。
この発明によれば、弾性部材が腐食性の流体に晒されても問題がなく、信頼性および汎用性を向上させることができる。
なお、弾性部材に使用する高耐食材料としては、フッ素ゴムなどを例示できる。
この発明によれば、親水性であるガラス製などのマイクロチップ基板材料に応じて、弾性部材に親水化処理が施されることにより、弾性部材の表面が液状の流体の流れに影響を及ぼすことを防止でき、流体制御を適切に行うことができる。
なお、親水処理としては、水酸化ナトリウム浸漬処理、ナトリウムおよびナフタレン錯体による浸漬処理などの化学処理や、紫外線処理、プラズマ処理などの物理処理などが有効である。
この発明によれば、弾性部材によって流路が閉塞された部分に液状の流体が侵入するのを防止できるため、流路を確実に閉塞することができる。
なお、撥水化処理により、撥油も併せて実現できる。これらの撥水・撥油化処理としては、Rf(パーフルオロアルキル)基を有する化合物を使用したコーティング処理を例示できる。
この発明によれば、弾性部材の弾性変形により部材本体に加わった力または変位量をセンシングすることにより、閉塞部材が押し込まれる際の加重が検出されることとなるため、検出された値に基づいて閉塞部材の押し込み力、押し込み量を調整し、流路の閉塞量を正確に制御することが可能となる。
なお、圧力センサの構成としては、例えば、弾性部材に当接するダイアフラムと、このダイアフラムを保持する保持体とを備えたものであってよい。
この発明によれば、流体圧力の増大により、液状の流体に含まれる気体ないし閉塞部材の配設部分に溜まった気泡が弾性部材や充填剤を通して外部に排出されるエア抜き構造を実現できる。これにより、流体圧力が一定となり乱流が防止されるため、安定した送液が可能となる。
なお、気体透過性材料としては、シリコーンなどを例示できる。
ここで、弁(バルブ)の種類は問わず、流路を深さ全体に亘って閉塞する全閉状態と、弾性部材の表面が流路の内壁面から突出しない位置に保持された全開状態との2つの状態に切り替え可能なON/OFFバルブとすることも、孔への押し込み量および押し込み力のいずれかの調節により開閉量が変わる調節バルブとすることもできる。
また、前記弁は、前記流路内の流体圧力が所定量を超えたときに開く安全弁であってもよく、これにより、流路内の予期せぬ圧力過大に対応でき、信頼性を向上させることができる。
この発明によれば、各閉塞部材を端から順次、タイミングをずらして孔に押し込み、流路に対して繰り返し進退させると、各閉塞部材の押し込み量に応じて流体が圧送され、ポンプ機能を実現できる。
なお、閉塞部材の数は、好ましくは3つ以上、より好ましくは、4つ以上、であり、各閉塞部材の大きさが互いに異なっていてもよい。
また、流路において、ポンプが設けられた部分が拡径してポンプ室を構成していてもよい。
ここで、マイクロチップに形成した孔に前述の弁やポンプ、また、センサ、マイクロチップの認識用IDタグなどのマイクロ流体デバイスを組み込むことができるので、マイクロチップの構成は必要な箇所に必要な数だけ孔が形成された簡単な構造で、しかも、マイクロチップ製作における高温プロセスによって左右されない構造とすることができる。したがって、多機能なマイクロ流体デバイスが搭載されたマイクロチップを安価に提供できる。
また、マイクロチップの孔の形成および孔への閉塞部材の配設は容易であって、より多くの閉塞部材をマイクロチップの所定範囲に集積して組み込むことも可能となるから、マイクロチップの規格化の動向にも対応することができる。
そして、マイクロチップを微小容量の流体の高効率反応に関して、分析、合成の分野で利用でき、マイクロチップを用いた装置の実用化も促進することができる。
ことを特徴とする。
この発明によれば、ガラス製の基板を使用する場合よりも樹脂製の基板では接合温度の低温化が図られ、基板同士の接合前に閉塞部材を基板に配設可能となるから、充填剤を孔の内周面と閉塞部材との間に充填する際に、一方の基板を平面上に配置することが可能となる。板面が平面上に配置された基板は、孔の周縁と当該平面とが当接することにより、孔の内周面と閉塞部材との間に充填された充填剤が基板の板面に回り込んで付着するのを防止できる。
このように、基板の接合前に閉塞部材が基板に配設され、基板を平面に配置するだけで、充填剤が基板の板面側に付着することを簡便に防止できる。また、接合温度が低い樹脂製の基板が採用されているので、基板接合時の弾性部材の劣化などによって信頼性が低下することがない。これらのことから、製造効率も向上させることができる。
なお、基板の板面を平面に配置された状態とする簡便な方法としては、例えば、剥離可能なシート部材を基板の板面に貼設する方法があり、孔の周縁にシート部材を密着させて好適に使用できる。また、基板が配置される平面としては、板状の部材や支持台などであってもよい。
前記ボードが着脱自在に配置されるボード配置部とを備えることを特徴とする。
また、ユニットがボードに着脱可能であって、マイクロチップに配設された閉塞部品が同じ構造であっても、異なる構造のユニットに交換することで、マイクロチップに設けられた閉塞部品の動作を変更できる。
ここで、前記押圧手段は、駆動源を備え、前記駆動源は、圧電アクチュエータおよびステッピングモータのいずれかであることが好ましい。
また、このようなセンシングにより、閉塞部材に対する過剰な押圧力や押圧量によって閉塞部材が破損することなどを防止できる。
なお、カムの形状、および回転スピードなどを調節することによって、閉塞部材を押圧する周期がコントロールできる。
一方、偏心回転体の回転を止めて閉塞部材の押圧を維持し、流体の流れを所定の流体圧力、流速、流量に維持することも可能であって、すなわち、偏心回転体の動作を変えるだけで、閉塞部材の各種用途に容易に対応できる。
ここで、ギア(歯車)も、その軸部から外周部である歯先までの距離と、軸部から歯が設けられていない外周部までの距離とが相違するため、偏心回転体として採用し得る。
ここで、前記シート部材は、耐食性であることにより、ボードおよびユニットの腐食を防止できる。
以下、本発明の第1実施形態を図面に基いて説明する。
なお、以下の説明では、既に説明した実施形態と同様の構成については、同一符号を付して、説明を省略もしくは簡略化する。
図1は、本実施形態のマイクロチップ1の分解斜視図である。また、図2は、マイクロチップ1の平面図であり、図3は、マイクロチップ1の断面図である。
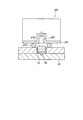
マイクロチップ1は、内部に形成された流路FAにおいて試料RG(図3)の分析を行うために使用され、2枚の基板11,12による積層構造となっている。このマイクロチップ1には、閉塞部材としてのバルブ30が組み込まれ、バルブ30により、試料RGの流体圧力または流量、流速が調節、制御される構造とされる。
なお、基板11,12は同材料に限らず、別材料であってもよい。
なお、本実施形態では、経路FA1,FA2、FA3において溝14は同径となっているが、例えば、経路FA3における溝14の径を経路FA1,FA2における溝14の径よりも大径にするなど、溝14の径寸法は適宜設定できる。
バルブ30は孔20に挿入されて被載置面141に配置されている。バルブ30の流路FA側の表面321は平坦で、このバルブ表面321と流路FAの壁面FAW(基板12の板面)とは略同一面上に揃っている。
バルブ30は、略1mm角の立方体形状のものであって、直方体形状の透明なガラス製の本体31と、この本体31に重ねられる板状の弾性部材32とを備え、流路FA(図3)側に配置される弾性部材32の弾性変形により、流路FAを閉塞するものである。
本体31の材料としては、ガラス材料のほかにも、基板11,12と同様に、サファイア、珪素、プラスチック、および酸化アルミニウム、窒化アルミニウムなどのセラミックス、あるいはステンレス等の金属などの硬質材料を使用することを検討できる。
一方、弾性部材32の材料には、本実施形態では、耐食性が高いフッ素ゴムが使用されているが、このほかにも、シリコーンゴム、ニトリルゴム、クロロプレンゴム、ウレタンなどの弾性変形材料を使用することができる。
なお、弾性部材32の厚さは、流路FAの深さの0.2〜5倍程度が好ましい。弾性部材32がこれよりも厚いと、試料RGの流体圧力が高圧となった場合に、流体圧力による変形量が過大となる。また、弾性変形の程度が大き過ぎて押し込み量が弾性部材の表面321(試料RGとの接液面)まで伝わりずらくなり、調節が困難となるおそれがある。一方、0.2倍程度よりも薄いと、弾性部材32の変形量が小さ過ぎ、流路FAの閉塞が困難となるおそれがある。
まず、マイクロチップ1の製造手順としては、基板11の材料がプラスチック以外である場合はサンドブラスト、エッチング、機械加工などにより、基板11の材料がプラスチックである場合は、機械加工、プレス、射出成形などによって溝14を形成する。
また、導入口121,122、排出口125、および孔20についても、基板11の材料に応じた適当な手段によってそれぞれ形成する。具体的には、基板11の材料がプラスチック以外である場合はサンドブラスト、放電加工、超音波加工、ドリル加工、レーザー加工、エッチングなどにより、そして、基板11の材料がプラスチックである場合は、ドリル加工、レーザー加工、プレス、射出成形などにより形成する。
なお、この熱融着のほか、陽極接合、レーザー接合、ろう付け、表面活性化接合によって基板11,12を接合してもよく、あるいは接合しないで、基板11,12を互いに重ねた状態で挟みつけてもよい。
これにより、バルブ30を配設するためのマイクロチップ1が完成する。
また、バルブ30のマイクロチップ1への配設にあたっては、被載置面141と弾性部材32の表面321とを接着することが好ましく、これによってバルブ30配設部分に試料RGが溜まり、流れが阻害されたり、試料RGの液量がくるうのを防止できる。
この場合の接着手順としては、バルブ30を孔20に挿入する前に弾性部材32の表面321をプラズマ処理などで表面活性化したり、弾性部材32の表面321に薄く接着剤35を塗布し、接着剤35の流動性が低下した後に、バルブ30を孔20に挿入することで行う。なお、弾性部材32と接着剤35とを同材質とすることにより、接着剤35と弾性部材32とが一体化されるため、接着剤35の塗布によって弾性部材32の弾性変形に影響が出るのを防止できる。
以上で、バルブ30のマイクロチップ1への組み込みが完了する。
この場合はまず、前述の方法により、導入口121,122、排出口125、および孔20を基板12にそれぞれ形成し、この基板12と、別途溝14が形成された基板11とを接合する前に、前述の方法により製作されたバルブ30を基板12の孔20に配設する。
このバルブ30を配設する際には、基板12の片面にテフロン(登録商標)シートなどの剥離可能なシート部材(不図示)を貼設し、このシート部材で孔20の一端側が覆われた状態とする。この状態で、孔20の他端側からバルブ30を孔20に挿入し、接着剤35を孔20の内周面とバルブ30との間に充填する。ここで、孔20の周縁21にシート部材が密着するので、孔20の内周面から接着剤35が基板12の板面に回り込まず、基板12板面に接着剤35が付着しない。基板12の板面と弾性部材の表面321とが同一平面になる。そして、接着剤35の硬化後、シート部材を剥離し、基板11,12を重ね合わせて接合するが、基板11,12の材料がプラスチックであるため、基板11,12の接合手段として比較的低温の熱融着などを採用でき、基板11,12の接合時における弾性部材32の劣化を防止できる。
試料RG1,RG2を分析する際には、導入口121から試料RG1を、そして、導入口122からは試料RG2を、図示しない装置により所定の圧力または流量または流速でそれぞれ導入する。すると、試料RG1,RG2は経路FA1,FA2をそれぞれ流れ、合流部JCTに向かう。そして、これらの試料RG1,RG2は、合流部JCTに達すると混合流を形成し、経路FA3を流れて排出口125から排出される。
すなわち、バルブ30は、開閉切り替えバルブ(ON/OFFバルブ)としても、開閉量調節弁としても使用できる。なお、バルブ30を常に閉じて閉止栓としてもよく、この場合の開閉量は任意である。さらに、流路FAを閉塞することなく常に全開の状態であってもよい。
また、弾性部材32と本体31とが均一な厚さで形成されて積層されているので、バルブ30が押し込まれる際や、流路FA側から流体圧力を受けた際に、弾性部材32の表面321が波打つように変形することがなく、試料RGの流れが阻害されない。
このように、バルブ30を押し込むことにより、試料RGの流体圧力や流速、流量の制御が可能となり、試料RG1,RG2を所望の条件で反応させて合成し、この際の試料RGの状態を分析することができる。
(1)バルブ30がマイクロチップ1の孔20に挿入されることにより流路FAが閉塞される構造とされ、流路FAを閉塞するための可動部分がバルブ30それ自体であるため、基板11,12を変形させて流路FAを閉塞する必要がない。このため、マイクロチップ1の基板11,12の材料として、耐圧性および耐食性が高いガラスなどの硬質材料を使用できるから、マイクロチップ1の信頼性および汎用性を大きく向上させることができる。また、基板11,12が硬質であるため、取り扱い時のハンドリング性も良い。
さらに、弾性部材32が孔20の周縁21および溝14の端部142に密接するので、流路FAが確実に閉塞され、耐圧性を確保できる。
また、マイクロチップ1の孔20の形成および孔20へのバルブ30の配設は容易であって、より多くのバルブ30をマイクロチップ1の所定範囲に集積して組み込むことも可能となるから、マイクロチップ1の規格化の動向にも対応することができる。
そして、本発明のマイクロチップ1を微小容量の試料RGの高効率反応に関して、分析、合成の分野で利用でき、マイクロチップ1を用いた装置の実用化も図られる。
次に、本発明の第2実施形態について説明する。
本実施形態では、第1実施形態のマイクロチップ1において採用可能なバルブをいくつか例示する。
図6には、本実施形態のバルブ40が示されている。
バルブ40は、図6(A)に示すように、ガラスなどの硬質材料による本体41と、本体41に重ねられる弾性部材42とを備えている。
本体41は、側方から見て断面略V字状に形成され、この断面V字部分は突出部411となっている。この突出部411は、本体41の流路FA側の面から見ると、畝状に形成され、弾性部材42は、突出部411と対応するように、V字状に窪んだ形状となっている。
この際、本体41の端部に加えられた押圧力が突出部411を介して弾性部材42に集中的に作用するので、前記実施形態のバルブ(図4参照)と比べて小さい押し込み力、押し込み量で弾性部材42を変形させ、溝14を閉塞することができる。
なお、突出部411の形状は、V字状に限らず、U字状や台形、角形に突出する形状であってもよく、この突出部411の形状に応じて弾性部材42が形成される。
バルブ50は、図7(A)に示すように、本体31と、本体31と重ねられる弾性部材52とを備えている。
弾性部材52の本体31側とは反対側の表面、中央部分には、角柱状に突出する堰部521が形成されている。この堰部521は、半導体製造プロセスにおける微細加工などにより形成されたもので、その先端における幅寸法は、マイクロチップ1に形成された溝14の幅以上となっている。
なお、バルブ50のサイズを大きくするほど、また、弾性部材52の厚さ寸法を大きくするほど、バルブ50開放時の所定圧力を大きくできる。
バルブ55は、図8(A)に示すように、本体31と、弾性部材56とを備え、弾性部材は平面視H字形状となっており、H字の横棒部分が堰部561、両側の縦棒部分が土手部562となっている。この堰部561および土手部562は、半導体製造プロセスにおける微細加工などにより形成されている。
このバルブ60は、図9(A)に示すように、立方体状の弾性部材62のみで構成され、前述した各バルブ30〜55の本体31等に相当する硬質部材を有していない。
ただし、弾性部材を保持する硬質部材が設けられていないため、流路FAを部分的に閉塞する場合では、その開閉量の調節が難しい場合があり、その場合には、前記実施形態および本実施形態で述べたバルブ30,40やバルブ70(図10)などが適する。
このバルブ70の本体71は、2つの部材を有し、この点で、前述した各バルブ30〜60とは異なる。
本体71は、角筒状のパイプ711と、パイプ711の内部に挿入される角柱状の棒状部材712とを有している。これらのパイプ711と棒状部材712との間には、接着剤35が充填され、この接着剤35の延性および弾性によって棒状部材712がパイプ711に対して進退自在とされている。なお、本実施形態では、棒状部材712の長さは、パイプ711の軸方向寸法よりも大きく、棒状部材712の先端がパイプ711よりも突出している。また、棒状部材712の幅寸法は、マイクロチップ1に形成された溝14の幅以下となっている。このような棒状部材712およびパイプ711の端部に、弾性部材32を重ねて設ける。
また、棒状部材712とパイプ711内周面との間に隙間がある場合は、溝14に対して孔20の位置がずれていた場合でも、バルブ70を接着する隙間(ガタ)を利用して棒状部材712と流路FAとの位置を合わせることが可能となる。これにより、バルブ70が孔20の中心からずれても問題がなく、基板11,12の形成および接合を容易化できる。
このバルブ80は、図11(A)に示すように、本体31と、シリコーンゴムなどの気体透過性の材料で形成された弾性部材82とを備えている。
このバルブ80をマイクロチップ1の孔20に配設する際は、シリコーン系などの気体透過性の充填剤としての接着剤85をバルブ80の側面四方に塗布し、バルブ80と孔20の内周面との間に接着剤85を充填する。なお、前述のように、弾性部材82の表面821と被載置面141とを接着することが好ましい。
この状態で液相の試料RGを流路FA(図2)に導入すると、流路FA内の流体圧力によって試料RGに含まれる気体が接着剤85を透過して外部に排出されるとともに、弾性部材82の気体透過性により、試料RGに含まれる気体がバルブ80の配設位置よりも流路FAの下流側に流れる。このようなエア抜き構造により、流体圧力が一定となり乱流が防止されるため、安定した送液が可能となる。
なお、接着剤85および弾性部材82のいずれかが気体透過性であれば、試料RGのエア抜き構造を実現できる。
バルブ90は、部材本体としての圧力センサ91を備え、この圧力センサ91に弾性部材32が積層されている。
圧力センサ91は、バルブ90が押し込まれた際の弾性部材32の弾性変形によって変位する導電性シリコン製のダイアフラム911と、このダイアフラム911をギャップ934(図13)を間に挟んで保持するガラス製の保持体912とを備えている。
ダイアフラム911は、板状に形成され、保持体912側の面に保持体912との接合用パターン9111が形成されている。
また、基板932には、略等間隔に延びる3本の導電性パターン9321,9322,9323がそれぞれ形成されている。これらの導電性パターン9321,9322,9323は、各取出電極9123とそれぞれ接続され、各取出電極9123と反対側の端部が固定電極9221ないし接合用パターン9222にそれぞれ接続されている。
そして、基板931,932の間には、隣り合う導電性パターン9321〜9323間に、大気開放された間隙部9325,9326がそれぞれ形成されている。
なお、圧力センサ91は、静電容量式でゲージ圧型であるが、歪ゲージ検出式や絶対圧力型の圧力センサとしてバルブ90の部材本体を構成することもできる。
また、ここでは圧力センサの例を示したが、加重センサ、変位検出センサを用いてもよい。
次に、本発明の第3実施形態について説明する。
本実施形態のマイクロチップ2は、内部に形成された流路の形状が第1実施形態における流路とは異なり、このため、バルブが組み込まれている位置も第1実施形態とは異なっている。
マイクロチップ2は、基板11,12が重ねられた構造であり、基板11には、流路FAMの形状に応じた溝24が形成されている。
流路FAMは、基板11の長手方向に沿って1往復半するように蛇行し、始端に設けられた二股部分は、試料RGの合流部JCTとなっている。すなわち、流路FAMは、合流部JCTにそれぞれ流れる経路FA1,FA2と、蛇行部分のFA3とを含んで構成されている。
具体的に、経路FA1,FA2に形成された孔20にはバルブ90がそれぞれ配設され、各バルブ90は、所定の流圧などに基いて流路FAを任意の開閉量で閉塞している。
また、経路FA3の合流部JCTの後段に形成された孔20には、安全バルブ50が配設されている。安全バルブ50の堰部521が溝24の底部まで押し込まれ、経路FA3から延びた小流路FA4を全閉状態としているため、通常、経路FA3から小流路FA4に試料RGが流れ出ることはない。そして、経路FA3が2回折り返すように蛇行した後の経路FA3途上に順に形成された2つの孔20には、エア抜きバルブ80、バルブ30が配設されている。エア抜きバルブ80は、孔20の周縁21および溝24の端部142に密着するように押し付けられ、バルブ30は、流路FAを部分的に閉塞している。
導入口121,122から導入された試料RG1,RG2は、経路FA1,FA2をそれぞれ流れる際に、加重検出型のバルブ90により、それぞれの所定の流量、圧力などに調節され、合流部JCTで混合流を形成して経路FA3を流れる。ここで、合流部JCTの後段で流路FA内の流体圧力が所定量を超えたときには、安全バルブ50が開き、試料RGが経路FA3から小流路FA4を通り、排出口128から排出される。これにより、流路FA内の予期せぬ圧力過大に対応でき、信頼性を向上させることができる。この安全バルブ50による圧力チェックの後、試料RG1,RG2は、経路FA3を蛇行しながら反応、合成し、排出口125から排出される。この排出の前に、エア抜きバルブ80によって試料RG1,RG2から気体が除かれ、その気体はエア排出口129から排出されるので、整流された状態の試料RGを取り出すことができる。このエア抜きは、エア抜きバルブ80近傍のバルブ30によって流路FAが閉塞され、試料RGに所定圧力が加わることで行われ、このバルブ30により、エア抜き後の試料RGの送液を安定化できる。なお、エア排出口129から排出されたエアは、チューブなどで接続された他のマイクロチップに導入されていてもよい。
(11)バルブ90により合流部JCTの前段で試料RG1,RG2の圧力などが所定量に調節されるので、試料RG1,RG2について所望の条件で合流操作することができる。
なお、バルブ90では、弾性部材32(図13)の弾性変形を通じてバルブ90が押し込まれる際の加重が検出されるため、検出された値と所定の規定値との差に基いて、バルブ90の押し込み力または押し込み量をフィードバック制御することも考えられる。
次に、本発明の第4実施形態について説明する。
本実施形態は、前記各実施形態ではバルブであった閉塞部材を複数並べてポンプを構成したものである。
図15には、本実施形態におけるマイクロチップ3が示され、マイクロチップ3には、流路FAMに沿って4つの閉塞部材100が1列に並んで配置されている。
ひとつひとつの閉塞部材100は、前述のバルブ30(図4参照)と同様に、硬質材料の本体31と、この本体31と均一な厚さで重ねられる弾性部材32とを備え、流路FAM側の表面が平坦に形成されたものである。
各閉塞部材100は、マイクロチップ3に形成された矩形状の孔110の中に互いに隣接するように配置され、孔110の内側に延性および弾性を有する接着剤35によって互いに接着されている。
すなわち、閉塞部材100は、タイミングをずらして流路FAに対して繰り返し進退されるので、各閉塞部材100の押し込み量に応じて試料RGを圧送することが可能となる。
(13)本実施形態によれば、前述のバルブ30と同様、簡略な構造でポンプを構成できるので、マイクロチップ3の流体制御に極めて有用となる。
次に、本発明の第5実施形態における切替え装置130について説明する。
図17は、切替え装置130の平面図であり、切替え装置130は、前記各実施形態におけるマイクロ流路の流体制御構造を備えた応用装置(アプリケーション)である。
切替え装置130は、基板11,12が重ねられたマイクロチップ3を備え、このマイクロチップ3における流路FAAは、所定の経路としての直線状の経路FAA1と、この経路FAA1にそれぞれ接続される導入経路FAA2〜FAA4と、経路FAA1から分岐する複数の排出経路FAA5,FAA6とを有する。なお、導入経路FAA3、経路FAA1、排出経路FAA5は同一直線上に配置されている。
また、各導入経路FAA2〜FAA4の一端側には、導入口121〜123がそれぞれ設けられ、各排出経路FAA5,FAA6の一端側には、排出口125,126がそれぞれ設けられている。このような切替え装置130は、導入口121〜123から排出口125,126までの流路FAAの道筋を切り替えるために用いられる。
そして、このように経路FAA1に導入された試料RG1〜RG3の排出経路は、必要に応じて、バルブ40D,40Eの一方を開き、他方を閉じることで切り替えられ、排出口125,126から排出された試料RGは、排出口125,126に接続された図示しないチューブを通って、他のマイクロチップの流路などに導入される。
なお、本実施形態では、1つのマイクロチップ3に導入口121〜123および排出口125,126が形成されていたが、これらの導入口121〜123および排出口125,126は、互いの流路が連結された複数のマイクロチップに別々に設けられていてもよい。
次に、本発明のマイクロ流路の流体制御構造を応用した装置であるミキサー150について説明する。
図18は、本実施形態におけるミキサー150の平面図である。
ミキサー150は、前述のようなマイクロチップに形成された流路FABに沿って4つのバルブ80A,30A,30B,80Bが順に配置された構造とされ、経路FAB1,FAB2の合流部JCTの後段側に設けられている。このミキサー150は、経路FAB1,FAB2にそれぞれ導入された試料RG1,RG2を混合するのに用いられる。
また、流路FABは、バルブ30A,30Bの配置された位置でそれぞれ平面視円形状に膨出しており、この部分は、拡径部FAB3,FAB4とされている。
(15)このようなミキサー150をマイクロチップ上に実現することにより、混合しにくい粘度の高い試料RG1,RG2同士を混合することができる。
さらに、本発明のマイクロ流路の流体制御構造を応用した装置であるインジェクター160について説明する。
図19は、本実施形態におけるインジェクター160の平面図である。
インジェクター160は、基板11,12が重ねられたマイクロチップ4を備え、このマイクロチップ4における流路FACは、互いに略平行に延びる第1経路としての2本の経路FAC1,FAC2と、これらの経路FAC1,FAC2と交差するように延びる第2経路としての注入経路FAC3とを有する。
経路FAC3は、一端側が試料RG3の導入口123とされ、経路FAC1,FAC2とそれぞれ略直角に交差して、他端側は経路FAC2に接続されている。
また、経路FAC1の両端には、試料RG1の導入口121および排出口125がそれぞれ設けられ、同様に、経路FAC2の両端には、試料RG2の導入口122および排出口126がそれぞれ設けられている。
このようなインジェクター160は、経路FAC1,FAC2をそれぞれ流れる試料RG1,RG2に対し、注入経路FAC3を通じて、これらの試料RG1,RG2に所定量の試料RG3を注入するために用いられる。
まず、バルブ40A,40B,40Eを閉じ、導入口123から試料RG3を注入経路FAC3に導入した後、バルブ40C,40D,40Gを閉じることで、経路FACにおいて任意の量の試料RG3が切り取られる。
この状態で、試料RG1を導入口121から、試料RG2を導入口122から経路FAC1,FAC2にそれぞれ導入し、バルブ40A,40B,40Eを開く。この操作により、注入経路FAC3,FAC4以外に試料RG3を排除する。
そして、バルブ40B,40Eを閉じると同時にバルブ40D,40Gを開くと、経路FAC1,FAC4,FAC6において、試料RG1中に一定量の試料RG3が注入された流体が排出口126へと流れていく。経路FAC6には、図示しないが、ビーズを充填してカラムなどが形成されていてもよいし、光分析による分析部があってもよい。光分析としては、分光光度計、吸光度計、熱レンズ顕微鏡などの装置を用いて、定量、定性分析などを実施できる。カラムが形成された後段に分析部を設けることによって、クロマトグラフィーに供することが可能である。
(16)このようなインジェクター160をマイクロチップ上に実現することにより、化学分析や環境分析などの進展に寄与することができる。
次に、前記実施形態で詳述した各種態様のマイクロチップに搭載された閉塞部材を操作する操作装置について説明する。すなわち、当該操作装置は、前述したように閉塞部材が集積化されたマイクロチップを使用して、化学分析装置、バイオ・DNA分析装置、化学合成などを行なう際に利用される。
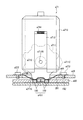
図20は、本実施形態における操作装置a1の概略斜視図である。
操作装置a1は、マイクロチップa0が挿入されるスロットa11が形成された筐体a10を備え、図示しないパソコンなどの外部機器が接続されている。この操作装置a1により、マイクロチップa0に搭載された閉塞部材としてのバルブa100の操作がなされ、また、マイクロチップa0内の試料の状態を検出して得られた情報に基いて、外部機器で各種分析が行われる。
操作装置a1の筐体a10内部には、水平方向に延びるとともに断面L字状の一対のレールa12が設けられ、このレールa12をボード配置部として、レールa12上には、矩形板状のボードa20が着脱自在に配置される。すなわち、ボードa20は、両側側面がレールa12に保持され、レールa12の内周上面部a121は、ボードa20を所定位置に案内する案内部として機能する。レールa12に保持されたボードa20は、筐体a10内部の壁などに付き当てて位置決めされる。
なお、操作装置a1内部には、マイクロチップa0から排出された流体を回収するための図示しない容器が設けられている。この容器の構成は、通常のタンクでもよいし、吸水性ポリマーが充填されたものでもよく、この容器は、ボードa20に取り付けられていてもよい。
一方、スロットa11から差し込まれたマイクロチップa0は、筐体a10内のマイクロチップ配置部としての筐体底面部a13上に配置され、ボードa20と対向する。なお、マイクロチップa0は、バルブa100が操作される際に位置がずれないように、図示しないバネなどによって筐体底面部a13に押さえ付けられている。
ここで、ボードa20上の各ユニットa30と、マイクロチップa0上の各バルブa100とは、互いに対向、当接し、対向するもの同士(1組、ペア)で一つのデバイスを構成する。
図22は、操作装置a1内部の平面図である。
筐体底面部a13(図20)にマイクロチップa0が配置されると、マイクロチップa0に設けられた各バルブa100とボードa20に設けられた各ユニットa30とがそれぞれ対応し、本実施形態では互いに平面的に重なる。
マイクロチップa0の図示は簡略したが、このマイクロチップa0は、図1などを参照して第1実施形態などで説明したマイクロチップ1などと略同様に、矩形平板状の2枚の透明ガラス基板が重ねられ、一方の基板に流路FAとなる溝が刻設され、他方の基板には、流路FAと対応する位置に各バルブa100が配設される孔20が貫通形成されたものである。
バルブa100は、図4などを参照して第1実施形態で説明したバルブ30と略同様の構成であるため、その説明を省略する。なお、バルブa100として、前記各実施形態で説明した閉塞部材のいずれも採用できる。
流路FAは、導入口121,122から導入された試料RG(試料RG1,RG2の2種類)が合流する略Y字状の合流部JCTを経て、マイクロチップa0の長手方向に2往復するように蛇行して形成されている。
そして、導入口121と合流部JCTとの間、および導入口122と合流部JCTとの間に、バルブa100がそれぞれ配置され、流路FAの蛇行部分にも、バルブa100が2箇所、それぞれ配置されている。
ボードa20には、流路に送液する試料のタンクが取り付けられる場合がある。ただし、このようなタンクについては、衛生上などの理由により、使い捨てで使用できることが望ましいため、ボードa20とは別に設けられる方が望ましい。タンクをボードa20とは別とした場合、マイクロチップa0側に、送液量を多くするために試料を溜めておくリザーバーを形成することが考えられる。
そして、導入口121,122(図22)から試料RG1,RG2を流路FA内にそれぞれ導入し、合流部JCTで試料RG1,RG2を合流させ、相流を形成したり、合流部JCT以降の流路FAを反応場として試料RG1,RG2を互いに混合して合成を行うなどの操作を行うが、この際、ユニットa30とバルブa100とにより、試料RG(RG1およびRG2)の流量や流速、流体圧力がそれぞれ調節される。すなわち、ユニットa30とバルブa100とは、一組となって一つのデバイスを構成し、一体的に作動する。
また、同じマイクロチップa0を使用する場合でも、例えばバルブa100だけでなく、センサが配設され、流路FAにおける試料RGの流体圧力などをセンシングする必要がある場合などは、センサに接続されるプローブをボードa20に追加して配置する、あるいは、ボードa20ごと交換するなどすればよい。
(17)マイクロチップa0内に複数のバルブa100が集積されており、バルブa100ごとにユニットa30で押圧して操作できるので、高度な流体制御が可能となる。操作装置a1により、より多くの反応系を備えたマイクロチップを使用した複雑な分析や、他項目を同時に分析することなども可能となる。
次に、本発明の第9実施形態について説明する。
本実施形態は、第8実施形態において、操作装置内のボードを昇降可能としたものである。
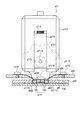
図23は、本実施形態の操作装置a4の側断面図を示す。
操作装置a4の筐体a10上面部には、筐体a10の図示しない支柱に固定された平面矩形状のプレートa111が取り付けられている。このプレートa111には、2つのネジ孔a111Aが形成されており、これらのネジ孔a111Aには、筐体a10上面部を貫通して昇降調節ネジa10Bがそれぞれ螺合されている。
ここで、底面部a41と略平行であり、レールa12が取り付けられる支持板a44と底面部a41との間には、圧縮コイルバネa412がそれぞれ介装される。
このような底面部a41の上方に配置されたボードa20上の四隅には、基台a42Aを有する柱状部材a42がそれぞれ立設するように配置され、対向辺において隣接する柱状部材a42の上端には、ボードa20の対向辺に沿って2つのプレートa43がそれぞれ架設される。このプレートa43の略中央に昇降調節ネジa10Bが対向し、プレートa43に対して進退する。つまり、昇降調節ネジa10Bが螺合前進すると、プレートa43が押し下げられ、柱状部材a42を通じてバネa412が圧縮されてボードa20が下降する。また、昇降調節ネジa10Bがプレートa43に対して後退すると、バネa412が復元してボードa20が上昇する。すなわち、昇降調節ネジa10B、柱状部材a42、プレートa43、およびバネa412は、ボードa20の進退手段を構成する。
ここで、ボードa20裏面とマイクロチップa0表面との距離Aは、マイクロチップa0の孔20からのバルブa100の突出寸法、あるいは、前述のリザーバーなどがマイクロチップa0表面に取り付けられている場合は、このリザーバーと接触しないように、適宜調節される。
マイクロチップa0のセット後、昇降調節ネジa10Bのツマミa102Aを先程とは逆方向に回してボードa20を下降させ、ボードa20に設けられたユニットa30とマイクロチップa0に設けられたバルブa100とを互いに当接させる。
なお、ボードa20の裏面側には、凸部a45が設けられており、ボードa20を下降させるとこの凸部a45がマイクロチップa0に当接し、ボードa20の下降が停止する。つまり、マイクロチップa0とボードa20との間には所定の距離で隙間があく。
(20)すなわち、操作装置a4内のボードa20の昇降操作により、マイクロチップa0をスロットa11に挿入する際などに、マイクロチップa0に搭載されたバルブa100とボードa20側のユニットa30とが干渉しない。これにより、使用済みのマイクロチップa0を新品と敏速に交換でき、マイクロチップa0のスロットa11への出し入れの際にバルブa100やユニットa30が破損することなどを未然に防止できる。
次に、本発明の第10実施形態について説明する。
本実施形態では、ボードに設けられるユニットの態様が前記各実施形態とは相違する。また、本実施形態は、第9実施形態(図23)の操作装置a4内でボードa20が昇降可能であってボードa20の高さ位置を調節可能であることに加えて、ユニットa30も位置調節可能としたものである。
圧電アクチュエータa35は、チタン酸ジルコン酸鉛(PZT(登録商標))、水晶、ニオブ酸リチウム、チタン酸バリウム、チタン酸鉛、メタニオブ酸鉛、ポリフッ化ビニリデン、亜鉛ニオブ酸鉛、スカンジウムニオブ酸鉛等の圧電素子(図示せず)の直流電圧印加による伸長を駆動力として出力するものであり、当該圧電素子を格納するとともにボードa20に取り付けられるケーシングa351と、圧電素子の伸長による駆動力によりバルブa100に向かって前進する可動軸a352(押圧部材)と、可動軸a352の変位量を検出するセンサa353が設けられている。センサa353の種類は、接触センサ、加重センサ、位置センサなどを例示できる。
そして再び、昇降調節ネジa10Bを回し、図24(A)に示すように、ボードa20を下降させ、可動軸a352をマイクロチップa0に配設されたバルブa100に当接させる。この際、図24(B)に示すように、筒状部材a355の端部がマイクロチップa0表面に当接することにより、バネa354に引っ張られた状態で、ケーシングa351がボードa20に対して押し上げられる。ここで、バネa354のバネ力の大きさは、可動軸a352がバルブa100を押し付ける力より強力なものとなっている。すなわち、筒状部材a355が可動軸a352の高さ合わせの機能を果たし、可動軸a352の高さ位置が適切に調節される。これにより、昇降調節ネジa10Bを奥までねじ込んだ際に可動軸a352がバルブa100に当たる際の荷重が緩和される。このような構造により、積層圧電素子のような変位量の小さい駆動源を使用した場合であっても、ケーシングa351とバルブa100との間の距離をほぼ一定とすることができるため、使用することが容易になる。
このバルブa100を流量、流速、流体圧力などの調整用バルブとして用いる場合は、流路FAを部分的に塞いで試料RGの流れを絞り、オン/オフバルブとして用いる場合は、流路FAを完全に閉塞する(図7のバルブ50、図8のバルブ55、図14のマイクロチップ2における安全バルブ50を参照)。
ここで、バルブa100に対する押圧力によってコントロールする場合は、バルブa100の大きさ、弾性部材32(図4)の弾性係数、流路FAにかかる圧力などの違いによって、バルブa100に加える力の必要量が変化するため、必要量に応じてバルブa100を押圧する力を変える必要がある。そのため、押圧力でコントロールする方法よりも、押し込んだ距離をコントロールする方法の方が望ましく、当該距離(移動量)をコントロールできる点で、本実施形態における圧電アクチュエータa35はバルブa100の押圧手段として好適である。
(21)バルブa100を押圧する押圧手段として、圧電アクチュエータa35を採用したので、電圧の制御による可動軸a352の変位量の調節が容易であり、バルブa100の押圧量を容易に調節できる。また、圧電アクチュエータにおける利点、すなわち、高出力、応答性が良いなどを享受できる。
次に、本発明の第11実施形態について説明する。
本実施形態は、前記各実施形態とは異なる押圧手段を示すものである。
図25は、本実施形態における操作装置a5の側断面図である。
ネジ部材a51およびバネ内蔵可動軸a52は、ボードa20に設けられたユニットa30の数と同じ4つ設けられているが、図25では、図中左のネジ部材a51および可動軸a52が背面側に位置するものと重なっており、これらは3つずつ図示されている。
支柱部a54の上部には、図示しないレールが設けられており、このレールには第2ボードa25が着脱自在に設けられている。
この第2ボードa25は、ボードa20と略同様、平面矩形に形成され、各ネジ部材a51が挿入されるネジ孔a251がそれぞれ形成されている。ネジ部材a51は、第2ボードa25を貫通する。
棒状部材a522は、先端部がボードa20の孔a21を通じて貫通している。また、棒状部材a522の基端側には大径部a522Aが形成され、この大径部a522Aと筒状部材a521の端部との間にバネa523が係止されている。なお、大径部a522Aには、棒状部材a522の加重量を検出するセンサa522Bが設けられている。
ホルダa524は、ボードa20に形成された凹部a20Aに取り付けられ、このホルダa524に対して筒状部材a521は、軸方向に前進してバネa523を圧縮し、また、バネa523の復元により軸方向に後退する。
また、センサa522Bにより検出された棒状部材a522の加重量に応じてネジ部材a51をねじ込むことができ、これにより、ネジ部材a51のねじ込み過ぎによるバルブa100の破損等をより確実に防止できる。
(23)棒状部材a522によるバルブa100の押圧の際、棒状部材a522がバネa523に付勢されバルブa100に対して上昇するため、ボードa20の下降の際に、棒状部材a522がバルブa100に衝突してバルブa100が破損することなどを未然に防止できる。
なお、可動軸a52の代わりにバネ内蔵のプローブなどを利用することで、加重量を変えることが容易にでき、さらに省スペース化できる。
次に、本発明の第12実施形態について説明する。
本実施形態では、前記各実施形態とは異なるバルブの押圧手段を示す。
図26は、本実施形態における操作装置内部において、互いに対向するマイクロチップa0およびボードa29を示す。
次に、本発明の第13実施形態について説明する。
本実施形態は、空気圧を利用する点が第12実施形態と共通する。
図27は、本実施形態における操作装置内部において、互いに対向するマイクロチップa0およびボードa29を示す。
本実施形態によっても、第12実施形態で述べた効果と同様の効果が得られる。
なお、本実施形態において、空気圧の代わりに、より大きな圧力を得られる油圧を利用しても良い。
次に、本発明の第14実施形態について説明する。
本実施形態では、前記各実施形態とは異なるバルブの押圧手段を示す。
図28は、本実施形態における操作装置内部において、互いに対向するマイクロチップa0およびボードa29を示す。
ステッピングモータa581は、ユニットa58の筐体a580内部に配置され、外部機器PCを通じて制御される電圧制御発振器a59が発振するパルス信号によって駆動される。ステッピングモータa581は、図示を省略するが、コイルと、コイルにより励磁されるステータと、ステータの内部において励磁される磁界により回転するロータとを備えている。
ネジa582の一方の端部には、ステッピングモータa581の出力軸a581Aが取り付けられる穴a582Aが形成されており、他端側は、ボードa29に形成されたネジ孔a292に螺合してバルブa100に対向する。
前述の第10実施形態のように、バルブa100の押圧手段として圧電アクチュエータa35を採用した場合と比べると、発熱が抑制され、電圧印加装置が不要であり、変位量がより正確である点で好ましい。
また、ステッピングモータの特性として、低電流・低電圧駆動が可能であるため、操作装置全体の小型化や携帯化の点で有利な構成を実現できる。
次に、本発明の第15実施形態について説明する。
本実施形態は、前記各実施形態とは異なるバルブの押圧手段を示すものである。
図29(A)は、本実施形態における操作装置内部において、互いに対向するマイクロチップa0、およびボードa27に設けられたユニットa60を示す。
カムa61は、軸部a611がボードa27の表面に略平行に沿い、外周部a612がバルブa100表面に対向する向きで配置されている。カムa61の軸部a611には、図示しないステッピングモータの出力軸が取り付けられる。
この孔a271には、カムa61の位置に合わせて、カムa61の外周部a612とバルブa100との間とを仕切るシート部材a63が設けられており、シート部材a63は、孔a271の両側でボードa27にネジa272で固定される。シート部材a63はボードa27のネジa272で固定された部分と密着する。本実施形態では、シート部材a63は、この孔a271からバルブa100に向かって若干垂れ下がった状態とされる。
なお、カムa61によりバルブa100が流路FAに押し込まれる際には、流路FAが完全に閉塞されてもよいし、流路FAが部分的に閉塞されてもよい。
一方、カムa61の回転を止めてバルブa100の押圧を維持し、流路FAにおける試料RGの流れを所定の流体圧力、流速、流量に維持することも可能であって、すなわち、カムa61の動作を変えるだけで、バルブa100の各種用途に容易に対応できる。
シート部材a64は、2層膜構造であり、カムa61が摺動する第1層膜a641は、フッ素樹脂系、ポリエチレン、ポリプロプレン、PET,PMMAなどのカムa61との摩擦抵抗が小さい低摩擦材料で形成されている。
一方、バルブa100に接触する第2層膜a642は、ポリプロピレン、塩化ビニル、シリコーンなどのボードa27およびバルブa100との摩擦抵抗が大きい高摩擦材料で形成されている。
このような第1層膜a641、第2層膜a642は、本実施形態では互いに接着されているが、例えば第2層膜a642に第1層膜a641がコーティングされていてもよい。あるいは、これら第1層膜a641および第2層膜a642は単に重ね合わせられたものであってもよい。
他方、シート部材a64の第2層膜a642はボードa27との摩擦抵抗が大きいため、カムa61により押圧するバルブa100の部分でシート部材a64がずれず、シート部材a64がカムa61の回転に追従して引っ張られ、伸びてしまうことを抑制できる。
(29)シート部材a64は、ボードa27との摩擦抵抗が異なる第1層膜a641および第2層膜a642で構成されており、摩擦抵抗が小さい第1層膜a641によりカムa61の摺動によるシート部材a64の破れなどを防止できるとともに、摩擦抵抗が大きい第2層膜a642により、シート部材a64がカムa61に引っ張られた際の伸びを軽減できる。
次に、本発明の第16実施形態について説明する。
前記各実施形態における各操作装置では、マイクロチップに配設されたバルブを押圧することで流路FAにおける試料RGの流れを絞っていたが、本実施形態では、バルブに加え、マイクロチップにポンプやセンサが設けられている場合、これらのポンプやセンサを操作する操作装置を示す。
本実施形態は、前述の操作装置a5などと同様、ボードa28を案内保持するレールa12を備え、レールa12にボードa28が着脱可能に保持される。このボードa28の下方にマイクロチップa00が対向配置される。
マイクロチップa00の図示は簡略したが、マイクロチップa00には、前述のマイクロチップa0のように、2枚の板状部材が積層された間に流路FAZが形成されるとともに、流路FAZを閉塞する閉塞部品を挿入するための孔20(図24)が複数形成されている。また、マイクロチップa00には、試料RG1,RG2がそれぞれ導入される導入口121,122と、試料RGが排出される排出口125とがそれぞれ形成されている。
圧力センサa102としては、第2実施形態で図12に示した加重検出型バルブ90における圧力センサ91を使用できる。または、圧力センサa102の代わりに、加重検出型のバルブ90を配置することも可能である。圧力センサa102のダイアフラム911(図12)は流路FAZに臨み、ダイアフラム911が流路FAZの壁部を構成する。すなわち、マイクロチップ00の孔20に圧力センサa102を配置することで流路FAZの壁面側が閉塞され、流路FAZを試料RGが流通可能となるのであり、このような圧力センサa102も流路FAZの流体制御構造における閉塞部材として機能する。圧力センサa102のダイアフラム911の表面と流路FAZの壁面とは略同一面上に揃っており、流路FAZにおける試料RGの流れを阻害しないようになっている。
ボードa28には、各バルブa100に対応する複数のネジ孔a21と、各ポンプa101に対応する長孔a281と、各圧力センサa102の各電極にそれぞれ対応する3つの孔a282とがそれぞれ設けられている。
また、各孔a282は、マイクロチップa00の配線パターンa102Aの各パッドa102A2の位置に形成され、孔a282には、プローブa72が1つずつ挿通されてパッドa102A2に当接する。ここで、プローブa72が設けられることから、本実施形態のボードa28は、絶縁性材料(例えばセラミックス)により形成されている。
そして、各長孔a281は、ポンプa101における閉塞部材100が並ぶ方向に沿って設けられていて、この長孔a281に沿って、ポンプa101を駆動するポンプユニットa71がそれぞれ配置される。
なお、プローブa72を圧力センサa102に直接当接することも考えられるが、本実施形態のように配線パターンa102Aを形成し、圧力センサa102から離れた位置で当該圧力センサa102とプローブa72とを導通させることにより、プローブa72当接により圧力センサa102の圧力検出に支障を来たすことなどを防止できる。
ここで、プローブa72には、圧力センサa102が検出した電気信号を処理するための回路などがユニット化された図示しないセンサユニットが接続され、このセンサユニットとプローブa72とを含めて、圧力センサa102に対応するユニットとして機能する。センサユニットは、信号を処理してパソコンに送信したり、トランスミッタのように特定の信号を発信する構造となっている。
ポンプユニットa71は、弾性部材で形成される偏心回転体としてのギアa711と、ギアa711を軸支するホルダa712と、ボードa28に固定されるケーシングa713と、ケーシングa713内部でホルダa712を付勢する定荷重バネa714とを備えて構成され、ギアa711の回転軸部a711Aには、ステッピングモータであるモータa715が取り付けられている。
ギアa711の外周部a711Bは、ケーシングa713の下方開口から突出し、ボードa28の長孔a281を通じて、ポンプa101を構成する閉塞部材100に当接する。
なお、ギアa711と閉塞部材100とを仕切るシート部材a64が設けられており、このシート部材a64は、図示が簡略されているが、前述のように、第1層膜a641および第1層膜a641が積層された構造となっている(図29(B))。このシート部材a64は、配線やプローブ接触などの必要がある特定の箇所を除き、本実施形態ではボードa28全体をカバーしている。すなわち、シート部材a64は、プローブa72が挿通される孔a282の部分には、圧力センサa102とプローブa72との間の導通のため、設けられていない。
ここで、ポンプユニットa71が設けられた箇所など、ギアa711の回転によりシート部材a64が磨耗しやすい箇所については、その箇所のみ、ボードa28全体を覆うシート部材a64とは別のシート部材a64を設け、磨耗時に取り替え可能に構成しても良い。
また、ギアa711と閉塞部材100との間にシート部材a64が介装されているので、順次押し込まれる閉塞部材100の角などにギアa711の歯a711Cが引っ掛かり、閉塞部材100が破損することなどを防止できる。
マイクロチップa00の導入口121,122から試料RG1,RG2を経路FA1,FA2にそれぞれ導入する。そして、経路FA1,FA2にそれぞれ設けられたポンプa101をポンプユニットa71で操作し、試料RG1,RG2を合流部JCTに向かって圧送する。この際、試料RG1,RG2の流体圧力が圧力センサa102で測定され、測定値を示す電位が配線パターンa102Aを通じてプローブa72に伝達される。
(30)マイクロチップa00には、バルブa100、ポンプa101、センサa102などが集積されており、これらをそれぞれユニットa30、ポンプユニットa71、プローブa72および信号処理回路(これらをセンサユニットとする)で操作できるので、より高度な流体制御が可能となる。
次に、本発明の第17実施形態について説明する。
本実施形態は、第16実施形態で使用されたシート部材の形状に特徴を有する。
図33は、マイクロチップa00に配設されたポンプa101を駆動するポンプユニットa71である。
ポンプa101とギアa711の外周部a711Bとの間には、シート部材a84が設けられており、このシート部材a84は、裏面側に凹凸形状を有する。
具体的に、シート部材a84は、ギアa711の歯a711Cのピッチと略同ピッチで設けられた凸部a841を有し、凸部a841同士の間が凹部a842である。
なお、このシート部材a84も、前述のシート部材a64と同様に、第1層および第2層を有する複数層構造となっている。
ここで、凸部a841の形状は、閉塞部材100が並ぶ方向において、中央側から外側に向かって、突出寸法が次第に大きくなっている。
なお、凸部a841は、シート部材a84において、閉塞部材100と対向する部分のみが突出するものであってもよいし、閉塞部材100が並んだ方向と交差する方向(図33中、前面と背面とを結ぶ方向)に延びる凸状のリブとして形成されていてもよい。
(34)ギアa711の歯a711Cがシート部材a84の表面を摺動する際、歯a711Cの位置が凸部a841の位置と略一致し、両端に配置された閉塞部材100が凸部a841の突出寸法も含めて押し下げられるから、ギアa711の径を小径化して装置を小型化することが可能となるとともに、閉塞部材100の押圧量を大きくできる。
他方、中央寄りに配置された2つの閉塞部材100は凸部a841の間に配置され、殆んど押圧されないため、これら中央寄りの2つの閉塞部材100と、両端の閉塞部材100との押込み量との差が大きく、これによってポンプa101容量を増大できる。
加えて、凸部a841が形成されていることで、歯a711Cにより押圧された両端の閉塞部材100と、押圧されない中央寄りの閉塞部材100との間で高さ位置がほぼ揃うので、シート部材a84に段差が生じにくい。これによって、ホルダa712および、ギアa711が上下動することなく、シート部材a84上を摺動できるようになる。
次に、本発明の第18実施形態について説明する。
本実施形態は、第16、第17実施形態のように、マイクロチップa00にポンプa101が設けられた構成において、ポンプa101に設けられた押圧手段を他の構成に変更したものである。
図34は、本実施形態における操作装置内部において、互いに対向するマイクロチップa00およびユニットとしてのカムa61を示す。
カムa61は、前述のように、図示しないホルダに軸支され、外周部a612が閉塞部材100が並ぶ方向に沿って配置される。
このような構成では、カムa61の偏心回転により、閉塞部材100が順次押圧され、流路FAZにおける試料RGが圧送される。
本実施形態によれば、前述の実施形態で述べた効果と略同様の効果が得られる。
なお、本実施形態では、カムa61と閉塞部材100との間を仕切るシート部材を設けていないが、カムa61回転の際の閉塞部材100上端部の引っ掛かり、破損などを防止する観点では、前述のシート部材a64、a84などを設けることが好ましい。
本発明を実施するための最良の構成、方法などは、以上の記載で開示されているが、本発明は、これに限定されるものではない。すなわち、本発明は、主に特定の実施形態に関して特に図示され、かつ、説明されているが、本発明の技術的思想および目的の範囲から逸脱することなく、以上述べた実施形態に対し、形状、材質、数量、その他の詳細な構成において、当業者が様々な変形を加えることができるものである。
したがって、上記に開示した形状、材質などを限定した記載は、本発明の理解を容易にするために例示的に記載したものであり、本発明を限定するものではないから、それらの形状、材質などの限定の一部もしくは全部の限定を外した部材の名称での記載は、本発明に含まれるものである。
なお、マイクロチップ5の排出側の経路FA3,FA4にも、バルブ170が同様に配設され、このバルブ170によって経路FA3,FA4を同時に、同じ開閉量で閉塞することができる。
図36におけるポンプ180では、3つの閉塞部材181〜183が並んで配置され、中央の閉塞部材182は両側の閉塞部材181,183よりも大きく形成されている。また、中央の閉塞部材182が配置される位置で流路FAが平面視円形状に膨出しており、ここはポンプ室FAPとされている。このようなポンプ180では、ポンプ室FAPの容量のぶん、閉塞部材181〜183の流路FAへの進退による送液量および送液圧力を大きくできる。
なお、ポンプ室FAPに対して進退する閉塞部材181〜183は、図37におけるポンプ190のように、すべて同じサイズに形成されていてもよい。
また、1つの操作装置において、マイクロチップおよびボードの複数組が設けられていてもよい。
さらに、第15実施形態などでは、ボードa20に設けられ、カムa61とバルブa100とを仕切るシート部材a64は、2層構造であったが、これに限定されず、1つの層で形成されていたり、3層以上の多層構造であってもよい。なお、シート部材を1つの層で形成する場合は、PP(ポリプロピレン)またはPET(ポリエチレンテレフタレート)などが好適である。
ここで、電気的なセンシングを行うに際しては、第16実施形態で示したように、センサ素子部(圧力センサa102)をマイクロチップの孔に配設するとともに、回路部などをユニット化し、これらセンサ素子部と回路部とをプローブなどで接続することが好ましい。
なお、ボードへのユニットの脱着方法としては、ボードの孔にユニットを差し込んで固定する、ボードへユニットをネジ込んで固定する、ボードの表面または側面に形成されたスリット部にユニットをスライドさせて装着するなどの方法がある。すなわち、ボードによるユニットの保持は、前記各実施形態のように、ボードに形成された孔にユニットを挿通するものに限られない。
11,12 基板
14,24 溝
20,25,110 孔
30,40,50,55,60,70,80,90,170,a100 バルブ(弁を構成する閉塞部材)
31,41,71 本体(部材本体)
91 圧力センサ(センサ)
32,42,52,56,62,82 弾性部材
35,85 接着剤(充填剤)
100,181〜183 閉塞部材
130 切替え装置
150 ミキサー
160 インジェクター
180,190,a101 ポンプ
321 表面
521,561 堰部
911 ダイアフラム
912 保持体
CNC 接続部
CRS 交差部(接続部)
FA,FAA,FAB,FAC,FAM,FAZ 流路
FAA1 経路(所定の経路)
FAA2〜FAA4 導入経路
FAA5,FAA6 排出経路
FAC1,FAC2 経路(第1経路)
FAC3 注入経路(第2経路)
RG,RG1〜RG3 試料(流体)
a1,a4,a5 操作装置
a10B 昇降調節ネジ
a102 圧力センサ(デバイス部)
a121 上面部(案内部)
a13 筐体底面部(マイクロチップ配置部)
a20,a25〜a29 ボード
a30,a55,a57,58,60,71,72 ユニット
a35 圧電アクチュエータ
a43 プレート
a52 バネ内蔵可動軸(押圧部材)
a61 カム(偏心回転体)
a63,a64,a84 シート部材
a352 可動軸(押圧部材)
a353,a522B センサ(押圧力、押圧量を計測)
a354 バネ
a411 凹部
a412 バネ(進退手段を構成)
a522 棒状部材(押圧部材)
a523 バネ
a581 ステッピングモータ
a582 ネジ(押圧部材)
a611 軸部
a612 外周部
a641 第1層膜
a642 第2層膜
a711 ギア(偏心回転体)
a711A 回転軸部(軸部)
a711C 歯(大径部)
a714 定荷重バネ
a841 凸部
Claims (11)
- 内部に形成された流路およびこの流路に連通する孔を有するマイクロチップと、
前記孔に挿入されて前記流路を閉塞する閉塞部材とを備え、
前記閉塞部材は、前記孔の流路側に配置される弾性部材と、この弾性部材の流路側とは反対側に設けられ前記孔に配置される部材本体とを有し、前記部材本体は硬質材料により形成されていることを特徴とするマイクロ流路の流体制御構造。 - 請求項1に記載のマイクロ流路の流体制御構造において、
前記マイクロチップは、硬質材料により形成されている
ことを特徴とするマイクロ流路の流体制御構造。 - 請求項1または請求項2に記載のマイクロ流路の流体制御構造において、
前記孔の径寸法は、前記流路の幅よりも大きい
ことを特徴とするマイクロ流路の流体制御構造。 - 請求項1ないし請求項3のいずれかに記載のマイクロ流路の流体制御構造において、
前記孔の内周面と前記閉塞部材との間に、延性および弾性を有する充填剤が介装されている
ことを特徴とするマイクロ流路の流体制御構造。 - 請求項1ないし請求項4のいずれかに記載のマイクロ流路の流体制御構造において、
前記閉塞部材は、前記孔から前記流路に向かって押し込まれ、この押し込み量および押し込み力のいずれかの調節により、前記流路内の流体流量、流体圧力、および流体流速のいずれかが調節される
ことを特徴とするマイクロ流路の流体制御構造。 - 請求項1ないし請求項5のいずれかに記載のマイクロ流路の流体制御構造において、
前記弾性部材は、高耐食性材料で形成されている
ことを特徴とするマイクロ流路の流体制御構造。 - 請求項1ないし請求項6のいずれかに記載のマイクロ流路の流体制御構造において、
前記弾性部材および前記充填剤の少なくとも一方は、気体透過性材料で形成されていることを特徴とするマイクロ流路の流体制御構造。 - 請求項1ないし請求項7のいずれかに記載のマイクロ流路の流体制御構造において、
前記閉塞部材は、前記流路を閉塞すべく前記流路に対して進退可能に設けられて弁を構成する
ことを特徴とするマイクロ流路の流体制御構造。 - 互いに重ねられる複数の樹脂製基板を備え、これらの基板のうち互いに重ねられる一方の基板の板面と他方の基板の板面から窪んで形成される溝とから流路が構成され、他方の基板を前記溝に向かって貫通する孔が形成されたマイクロチップと、前記孔に挿入されて前記流路を閉塞する閉塞部材とを備え、前記閉塞部材は、前記孔の流路側に配置される弾性部材と、この弾性部材の流路側とは反対側に設けられ前記孔に配置される部材本体とを有し、前記部材本体は硬質材料により形成されているマイクロ流路の流体制御構造を製造する方法であって、
他方の基板の板面を平面上に配置した状態で、延性および弾性を有する充填剤を前記孔の内周面と前記孔に挿入された前記閉塞部材との間に介装した後、
前記基板を互いに重ね合わせて接合する
ことを特徴とするマイクロ流路の流体制御構造の製造方法。 - 請求項1ないし請求項8のいずれかに記載の流体制御構造を備え、前記マイクロチップは、前記孔を複数有し、各孔に挿入された前記閉塞部材をそれぞれ操作する装置であって、
前記マイクロチップが配置されるマイクロチップ配置部と、
前記各閉塞部材とそれぞれ一体的に作動する複数のユニットと、
前記各ユニットをそれぞれ着脱自在に保持するボードと、
前記ボードが着脱自在に配置されるボード配置部とを備える
ことを特徴とする閉塞部材操作装置。 - 請求項10に記載の閉塞部材操作装置において、
前記ボードには、前記閉塞部材と前記ユニットとを仕切るシート部材が設けられる
ことを特徴とする閉塞部材操作装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005263112A JP4806548B2 (ja) | 2005-03-10 | 2005-09-09 | マイクロ流路の流体制御構造、マイクロ流路の流体制御構造の製造方法、および閉塞部材操作装置 |
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005067859 | 2005-03-10 | ||
| JP2005067859 | 2005-03-10 | ||
| JP2005263112A JP4806548B2 (ja) | 2005-03-10 | 2005-09-09 | マイクロ流路の流体制御構造、マイクロ流路の流体制御構造の製造方法、および閉塞部材操作装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2006283965A JP2006283965A (ja) | 2006-10-19 |
| JP2006283965A5 JP2006283965A5 (ja) | 2008-10-23 |
| JP4806548B2 true JP4806548B2 (ja) | 2011-11-02 |
Family
ID=37406089
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2005263112A Expired - Fee Related JP4806548B2 (ja) | 2005-03-10 | 2005-09-09 | マイクロ流路の流体制御構造、マイクロ流路の流体制御構造の製造方法、および閉塞部材操作装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4806548B2 (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2016034674A (ja) * | 2014-08-01 | 2016-03-17 | 大日本印刷株式会社 | 流路デバイス及びその製造方法 |
| KR101770796B1 (ko) | 2016-02-29 | 2017-08-24 | 광운대학교 산학협력단 | 액체 시료 분석 장치 |
| KR101818566B1 (ko) * | 2016-03-10 | 2018-01-15 | 한국기계연구원 | 미세 유체 칩 및 이의 제작 방법 |
Families Citing this family (21)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008238097A (ja) * | 2007-03-28 | 2008-10-09 | Tosoh Corp | 滴生成用微小流路集合体装置 |
| JP4868527B2 (ja) * | 2007-06-08 | 2012-02-01 | 公立大学法人首都大学東京 | 試料導入マイクロデバイス |
| JP4868526B2 (ja) * | 2007-06-08 | 2012-02-01 | 公立大学法人首都大学東京 | 試料導入マイクロデバイス |
| US8561963B2 (en) | 2007-12-19 | 2013-10-22 | Palo Alto Research Center Incorporated | Electrostatically addressable microvalves |
| KR100969667B1 (ko) * | 2008-03-24 | 2010-07-14 | 디지탈 지노믹스(주) | 생리활성물질을 전기적으로 검출하는 방법 및 이를 위한바이오칩 |
| JP5359686B2 (ja) * | 2009-08-25 | 2013-12-04 | 藤倉化成株式会社 | 液体流路装置とその製造方法 |
| US9283562B2 (en) | 2008-06-26 | 2016-03-15 | Fujikura Kasei Co., Ltd. | Liquid channel device and production method therefor |
| CN103341369B (zh) | 2008-10-28 | 2015-04-29 | 藤仓化成株式会社 | 液体流道装置及其制作方法 |
| DE102009023430B4 (de) * | 2009-05-29 | 2013-07-25 | Siemens Aktiengesellschaft | Vorrichtung und Verfahren zum Steuern von Fluidströmen in Lab-on-a-Chip-Systemen sowie Verfahren zum Herstellen der Vorrichtung |
| DE102009023429B4 (de) * | 2009-05-29 | 2013-08-14 | Siemens Aktiengesellschaft | Ventil für Lab-on-a-Chip-Systeme, Verfahren zum Betätigen und zur Herstellung des Ventils |
| JP5728778B2 (ja) * | 2010-06-01 | 2015-06-03 | 国立大学法人九州工業大学 | 解析装置及び解析装置の製造方法 |
| JP2012194062A (ja) * | 2011-03-16 | 2012-10-11 | Tokyo Denki Univ | マイクロ流体チップ及びそれを用いたマイクロ流体システム |
| US20130161193A1 (en) * | 2011-12-21 | 2013-06-27 | Sharp Kabushiki Kaisha | Microfluidic system with metered fluid loading system for microfluidic device |
| JP5871863B2 (ja) * | 2013-07-04 | 2016-03-01 | 住友ゴム工業株式会社 | マイクロ流路チップおよび医療用測定装置 |
| CN110975947A (zh) * | 2013-07-16 | 2020-04-10 | Abs全球公司 | 识别流体混合物中的成分的设备和产生流体混合物的设备 |
| JP6190352B2 (ja) * | 2014-12-19 | 2017-08-30 | 株式会社神戸製鋼所 | 流体流通装置及びその運転方法 |
| US10732712B2 (en) * | 2016-12-27 | 2020-08-04 | Facebook Technologies, Llc | Large scale integration of haptic devices |
| US20210148944A1 (en) * | 2018-03-22 | 2021-05-20 | Nikon Corporation | Fluidic device and system |
| WO2019180871A1 (ja) * | 2018-03-22 | 2019-09-26 | 株式会社ニコン | 流体デバイス及びシステム |
| JP7302148B2 (ja) * | 2018-08-03 | 2023-07-04 | 株式会社ニコン | 流体デバイスキットおよび流体デバイス |
| EP4273430A4 (en) * | 2020-12-31 | 2024-12-25 | Everlast Healthcare Limited | PISTON MECHANISM, FLUID CONTROL MECHANISM AND ITS APPLICATION |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS60169467U (ja) * | 1984-04-20 | 1985-11-09 | 旭有機材工業株式会社 | プラスチツク製ゲ−トバルブ |
| JP2002228033A (ja) * | 2001-02-05 | 2002-08-14 | Olympus Optical Co Ltd | 分離型マイクロバルブ |
| JP3538777B2 (ja) * | 2001-03-26 | 2004-06-14 | 独立行政法人産業技術総合研究所 | 微小化学反応装置 |
| JP2003166910A (ja) * | 2001-11-30 | 2003-06-13 | Asahi Kasei Corp | 送液機構及び該送液機構を備える分析装置 |
-
2005
- 2005-09-09 JP JP2005263112A patent/JP4806548B2/ja not_active Expired - Fee Related
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2016034674A (ja) * | 2014-08-01 | 2016-03-17 | 大日本印刷株式会社 | 流路デバイス及びその製造方法 |
| KR101770796B1 (ko) | 2016-02-29 | 2017-08-24 | 광운대학교 산학협력단 | 액체 시료 분석 장치 |
| KR101818566B1 (ko) * | 2016-03-10 | 2018-01-15 | 한국기계연구원 | 미세 유체 칩 및 이의 제작 방법 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2006283965A (ja) | 2006-10-19 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4806548B2 (ja) | マイクロ流路の流体制御構造、マイクロ流路の流体制御構造の製造方法、および閉塞部材操作装置 | |
| US7749444B2 (en) | Microfluidic device, method for testing reagent and system for testing reagent | |
| JP4531563B2 (ja) | 蠕動マイクロポンプ | |
| US8931328B2 (en) | Multilayer structure having a microfluidic channel and a system for detecting leakage from the microfluidic channel, and method of detecting leakage in a microfluidic device | |
| US20080112850A1 (en) | Micro Total Analysis Chip and Micro Total Analysis System | |
| Lee et al. | Bidirectional pumping properties of a peristaltic piezoelectric micropump with simple design and chemical resistance | |
| EP1925365A1 (en) | Micro total analysis chip and micro total analysis system | |
| JP2005283331A (ja) | マイクロチップ及びマイクロポンプ | |
| WO2009122340A1 (en) | Microfluidic mixing with ultrasound transducers | |
| WO2003071262A1 (en) | Micro chemical chip | |
| JP5363528B2 (ja) | 高分子駆動器を含む微小バルブ構造体及びラボオンチップモジュール | |
| JP4881115B2 (ja) | マイクロリアクター及びマイクロリアクターシステム | |
| JP5476514B2 (ja) | 混合流路で複数の流体を均一に混合する方法 | |
| JP2013181532A (ja) | マイクロ流体装置および外部圧電アクチュエータ | |
| WO2021073381A1 (zh) | 微流控基板及其流体驱动方法、微流控装置 | |
| CN215575174U (zh) | 一种定量免疫芯片 | |
| JP4533685B2 (ja) | マイクロ流体装置 | |
| JPWO2007145040A1 (ja) | 液漏れ防止機構を備えたマイクロ総合分析システム | |
| WO2007055151A1 (ja) | マイクロリアクタおよびマイクロ分析システム | |
| JP4206732B2 (ja) | バルブ装置と流体制御チップ | |
| JPWO2009022496A1 (ja) | マイクロ検査チップおよび検査装置 | |
| Duan et al. | A facile method for microfluidic metering and transport | |
| JP2009139120A (ja) | マイクロ検査チップ、マイクロ検査チップの液体定量方法および検査装置 | |
| JP2009062911A (ja) | 反応検出装置 | |
| JP2006214493A (ja) | マイクロバルブの流量調節方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD02 | Notification of acceptance of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7422 Effective date: 20070815 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20070817 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20080908 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20080908 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20110325 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110412 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110613 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20110802 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20110815 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140819 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140819 Year of fee payment: 3 |
|
| S533 | Written request for registration of change of name |
Free format text: JAPANESE INTERMEDIATE CODE: R313533 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |