しかしながら、上記のようにして描画点データを取得する際、たとえば、露光対象である基板に変形などが生じている場合には、その基板の変形に応じてラスター形式の画像データから読み出す画素位置が調整されて描画点データが取得されるが、ラスター形式の画像データの解像度はベクトル形式の画像データの解像度よりも低いため、線幅などの精度が低くなってしまう場合がある。また、配線パターンに斜めの線が存在する場合には、その斜めの線にジャギが発生してしまう場合などがあり、露光精度が劣化してしまう。
また、上記のような問題を回避するため、ラスター形式の画像データの解像度を上げることも考えられるが、ラスター形式の画像データの解像度を上げるとそのデータ量が膨大になってしまうため、画像データにおける読み出し画素位置の演算に時間がかかったり、画像データへのアクセス回数も増大したりして処理速度の低下を招くおそれがある。また画像データを記憶するメモリの容量を増やす必要が生じコストアップを招くおそれもある。
本発明は、上記事情に鑑み、上記のような描画点データを取得する方法において、上記のような処理速度の低下およびコストアップを招くことなく、描画精度の向上を図ることができる描画点データ取得方法および装置並びにその描画点データ取得方法および装置により取得された描画点データを用いて描画を行う描画方法および装置を提供することを目的とするものである。
本発明の第1の描画点データ取得方法は、描画点データに基づいて描画点を描画対象上に形成して描画対象上に画像を描画する際に用いられる描画点データを取得する描画点データ取得方法において、画像の元のベクトル形式の画像データを取得するとともに、描画対象上における描画点を形成すべき位置に対応する画像データ上の位置座標を取得し、ベクトル形式の画像データと上記位置座標とに基づいて描画点の描画点データを取得することを特徴とする。
また、上記本発明の第1の描画点データ取得方法においては、画像データに基づいて決定される画像領域と位置座標とを重ね合わせ、上記位置座標が属する画像領域の画像データに基づいて描画点データを取得するようにすることができる。
また、描画点データに基づいて描画点を形成する描画点形成領域を、描画対象に対して相対的に移動させるとともに、その移動に応じて描画点を描画対象上に順次形成して描画対象上に画像を描画する際に用いられる描画点データを取得する描画点データ取得方法であって、位置座標を、描画対象上の所定位置における描画点形成領域に対応するものとすることができる。
また、画像データに基づいて決定される画像領域と上記位置座標を含む線とを重ね合わせ、上記線が重なる画像領域の画像データに基づいて描画点データを取得するようにすることができる。 また、画像データと線との交点の位置に基づいて描画点データを取得するようにすることができる。
また、画像データに表されまたは画像データから求められる画像の輪郭と、線との交点を示す交点配置情報を取得し、その交点配置情報に基づいて描画点データを取得するようにすることができる。
また、線を、複数の描画点に対応する複数の位置座標を結ぶものとすることができる。
また、線を、時系列に並ぶ複数の描画点に対応する複数の位置座標を結ぶものとすることができる。
また、描画点データに基づいて描画点を形成する描画点形成領域を、描画対象に対して相対的に移動させるとともに、その移動に応じて描画点を描画対象上に順次形成して描画対象上に画像を描画する際に用いられる描画点データを取得する描画点データ取得方法であって、線を、時系列に並ぶ複数の描画点に対応する複数の位置座標を結ぶものとすることができる。
また、描画点データに基づいて描画点を形成する描画点形成領域を、描画対象に対して相対的に移動させるとともに、その移動に応じて描画点を描画対象上に順次形成して描画対象上に画像を描画する際に用いられる描画点データを取得する描画点データ取得方法であって、線を、描画対象上におけるまたは描画対象上の画像空間における描画点形成領域の描画軌跡に対応するものとすることができる。
また、描画点データに基づいて描画点を形成する描画点形成領域を複数有する描画点形成領域群を、描画対象に対して相対的に移動させるとともに、その移動に応じて描画点形成領域群に対応する描画点群を描画対象上に順次形成して描画対象上に画像を描画する際に用いられる描画点データを取得する描画点データ取得方法であって、線を、描画対象上の所定位置における描画点形成領域群の少なくとも一部の描画点形成領域を結ぶ線に対応するものとすることができる。
また、線にサンプリングピッチを付随させるようにすることができる。
また、画像データに基づいて決定される画像領域と上記位置座標を含む所定領域とを重ね合わせ、所定領域が重なる画像領域の画像データに基づいて描画点データを取得するようにすることができる。
また、描画点データに基づいて描画点を形成する描画点形成領域を複数有する描画点形成領域群を、描画対象に対して相対的に移動させるとともに、その移動に応じて描画点形成領域群に対応する描画点群を描画対象上に順次形成して描画対象上に画像を描画する際に用いられる描画点データを取得する描画点データ取得方法であって、所定領域を、描画対象上の所定位置における描画点形成領域群の少なくとも一部の領域に対応するものとすることができる。
本発明の第2の描画点データ取得方法は、描画点データに基づいて描画点を形成する描画点形成領域を、描画対象に対して相対的に移動させるとともに、その移動に応じて描画点を描画対象上に順次形成して描画対象上に画像を描画する際に用いられる描画点データを取得する描画点データ取得方法において、画像の元のベクトル形式の画像データを取得するとともに、画像の描画のための描画対象上におけるまたは描画対象上の画像空間における描画点形成領域の描画軌跡の情報を取得し、画像データにより表わされまたは画像データから求められる画像の輪郭と描画軌跡情報に対応する画像データ上における描画点データ軌跡との交点の配置を示す交点配置情報を取得し、交点配置情報に基づいて描画点データ軌跡に対応した描画点データを取得することを特徴とする。
また、上記本発明の第2の描画点データ取得方法において、描画点データ軌跡を交点配置情報により示される交点により区切って部分描画点データ軌跡とし、部分描画点データ軌跡に、その部分描画点データ軌跡の並ぶ順に2値化データを交互に割り当て、部分描画点データ軌跡毎に割り当てられた2値化データを、移動の方向に対応する画像データ上の走査方向について所定間隔でサンプリングして描画点データ軌跡に対応した描画点データを取得するようにすることができる。
また、交点配置情報の上記移動の方向に対応する画像データ上の走査方向の座標値を取得し、その取得した座標値を、画像データ上の走査方向の所定間隔の値でそれぞれ除算して量子化値を求め、画像データ上の走査方向に隣接する量子化値の差を求め、その差をランレングスデータとして取得し、その取得されたランレングスデータをデコードして描画点データ軌跡に対応した描画点データを取得するようにすることができる。
また、予め設定された描画対象の所定相対移動速度に対する画像の描画の際の描画対象の実移動速度の変動を示す速度変動情報を取得し、その取得した速度変動情報に基づいて、描画対象の実移動速度が相対的に遅い描画対象上の描画領域ほど描画点データの数が多くなるように上記所定間隔を変化させて描画点データを取得するようにすることができる。
また、描画対象上の所定位置に予め設けられた複数の基準マークを検出してその基準マークの位置を示す検出位置情報を取得し、その取得した検出位置情報に基づいて描画軌跡情報を取得するようにすることができる。
また、予め設定された描画対象の所定相対移動方向に対する画像の描画の際の描画対象の実移動方向のずれ情報を取得し、その取得したずれ情報に基づいて描画軌跡情報を取得するようにすることができる。
また、予め設定された描画対象の所定相対移動方向に対する画像の描画の際の描画対象の実移動方向のずれ情報を取得し、その取得したずれ情報および上記検出位置情報に基づいて描画軌跡情報を取得するようにすることができる。
本発明の第1の描画方法は、描画点データに基づいて描画点を描画対象上に形成して描画対象上に画像を描画する描画方法において、画像の元のベクトル形式の画像データを取得するとともに、描画対象上における描画点を形成すべき位置に対応する画像データ上の位置座標を取得し、ベクトル形式の画像データと上記位置座標とに基づいて描画点の描画点データを取得し、その取得した描画点データに基づいて描画点を描画対象上に形成することを特徴とする。
また、上記本発明の第1の描画方法においては、画像データに基づいて決定される画像領域と上記位置座標とを重ね合わせ、位置座標が属する画像領域の画像データに基づいて描画点データを取得するようにすることができる。
また、描画点データに基づいて描画点を形成する描画点形成領域を、描画対象に対して相対的に移動させるとともに、その移動に応じて描画点を描画対象上に順次形成して描画対象上に画像を描画する描画方法であって、上記位置座標を、描画対象上の所定位置における描画点形成領域に対応するものとすることができる。
また、画像データに基づいて決定される画像領域と上記位置座標を含む線とを重ね合わせ、上記線が重なる画像領域の画像データに基づいて描画点データを取得するようにすることができる。
また、画像データと線との交点の位置に基づいて描画点データを取得するようにすることができる。
また、画像データに表されまたは画像データから求められる画像の輪郭と、線との交点を示す交点配置情報を取得し、その交点配置情報に基づいて描画点データを取得するようにすることができる。
また、線を、複数の描画点に対応する複数の位置座標を結ぶものとすることができる。
また、線を、時系列に並ぶ複数の描画点に対応する複数の位置座標を結ぶものとすることができる。
また、描画点データに基づいて描画点を形成する描画点形成領域を、描画対象に対して相対的に移動させるとともに、その移動に応じて描画点を描画対象上に順次形成して描画対象上に画像を描画する描画方法であって、線を、時系列に並ぶ複数の描画点に対応する複数の位置座標を結ぶものとすることができる。
また、描画点データに基づいて描画点を形成する描画点形成領域を、描画対象に対して相対的に移動させるとともに、その移動に応じて描画点を描画対象上に順次形成して描画対象上に画像を描画する描画方法であって、線を、描画対象上におけるまたは描画対象上の画像空間における描画点形成領域の描画軌跡に対応するものとすることができる。
また、描画点データに基づいて描画点を形成する描画点形成領域を複数有する描画点形成領域群を、描画対象に対して相対的に移動させるとともに、その移動に応じて描画点形成領域群に対応する描画点群を描画対象上に順次形成して描画対象上に画像を描画する描画方法であって、線を、描画対象上の所定位置における描画点形成領域群の少なくとも一部の描画点形成領域を結ぶ線に対応するものとすることができる。
また、線にサンプリングピッチの情報を付随させるようにすることができる。
また、画像データに基づいて決定される画像領域と上記位置座標を含む所定領域とを重ね合わせ、上記所定領域が重なる画像領域の画像データに基づいて描画点データを取得するようにすることができる。
また、描画点データに基づいて描画点を形成する描画点形成領域を複数有する描画点形成領域群を、描画対象に対して相対的に移動させるとともに、その移動に応じて描画点形成領域群に対応する描画点群を描画対象上に順次形成して描画対象上に画像を描画する描画方法であって、上記所定領域を、描画対象上の所定位置における描画点形成領域群の少なくとも一部の領域に対応するものとすることができる。
本発明の第2の描画方法は、描画点データに基づいて描画点を形成する描画点形成領域を、描画対象に対して相対的に移動させるとともに、その移動に応じて描画点を描画対象上に順次形成して描画対象上に画像を描画する描画方法において、画像の元のベクトル形式の画像データを取得するとともに、画像の描画のための描画対象上におけるまたは描画対象上の画像空間上における描画点形成領域の描画軌跡の情報を取得し、画像データにより表わされまたは画像データから求められる画像の輪郭と描画軌跡情報に対応する画像データ上における描画点データ軌跡との交点の配置を示す交点配置情報を取得し、交点配置情報に基づいて描画点データ軌跡に対応した描画点データを取得し、その取得した描画点データに基づいて描画点形成領域によって描画点を描画対象上に形成することを特徴とする。
また、上記本発明の第2の描画方法においては、描画点データ軌跡を交点配置情報により示される交点により区切って部分描画点データ軌跡とし、部分描画点データ軌跡に、その部分描画点データ軌跡の並ぶ順に2値化データを交互に割り当て、その部分描画点データ軌跡毎に割り当てられた2値化データを、上記移動の方向に対応する画像データ上の走査方向について所定間隔でサンプリングして描画点データ軌跡に対応した描画点データを取得するようにすることができる。
また、交点配置情報の上記移動の方向に対応する画像データ上の走査方向の座標値を取得し、その取得した座標値を、画像データ上の走査方向の所定間隔の値でそれぞれ除算して量子化値を求め、画像データ上の走査方向に隣接する量子化値の差を求め、その差をランレングスデータとして取得し、その取得されたランレングスデータをデコードして描画点データ軌跡に対応した描画点データを取得するようにすることができる。
また、予め設定された描画対象の所定相対移動速度に対する画像の描画の際の描画対象の実移動速度の変動を示す速度変動情報を取得し、その取得した速度変動情報に基づいて、描画対象の実移動速度が相対的に遅い描画対象上の描画領域ほど描画点データの数が多くなるように上記所定間隔を変化させて描画点データを取得するようにすることができる。
また、描画対象上の所定位置に予め設けられた複数の基準マークを検出してその基準マークの位置を示す検出位置情報を取得し、その取得した検出位置情報に基づいて描画軌跡情報を取得するようにすることができる。
また、予め設定された描画対象の所定相対移動方向に対する画像の描画の際の描画対象の実移動方向のずれ情報を取得し、その取得したずれ情報に基づいて描画軌跡情報を取得するようにすることができる。
また、予め設定された描画対象の所定相対移動方向に対する画像の描画の際の描画対象の実移動方向のずれ情報を取得し、その取得したずれ情報および上記検出位置情報に基づいて描画軌跡情報を取得するようにすることができる。
本発明の第1の描画点データ取得装置は、描画点データに基づいて描画点を描画対象上に形成して描画対象上に画像を描画する際に用いられる描画点データを取得する描画点データ取得装置において、描画対象上における描画点を形成すべき位置に対応する、上記画像の元のベクトル形式の画像データ上の位置座標を取得する位置座標取得手段と、画像の元のベクトル形式の画像データを取得し、その取得したベクトル形式の画像データと位置座標取得手段により取得された位置座標とに基づいて描画点の描画点データを取得する描画点データ取得手段とを備えたことを特徴とする。
また、上記本発明の第1の描画点データ取得装置においては、描画点データ取得手段を、画像データに基づいて決定される画像領域と上記位置座標とを重ね合わせ、上記位置座標が属する画像領域の画像データに基づいて描画点データを取得するものとすることができる。
また、描画点データに基づいて描画点を形成する描画点形成領域を、描画対象に対して相対的に移動させるとともに、その移動に応じて描画点を描画対象上に順次形成して描画対象上に画像を描画する際に用いられる描画点データを取得する描画点データ取得装置であって、位置座標を、描画対象上の所定位置における描画点形成領域に対応するものとすることができる。
また、描画点データ取得手段を、画像データに基づいて決定される画像領域と上記位置座標を含む線とを重ね合わせ、上記線が重なる画像領域の画像データに基づいて描画点データを取得するものとすることができる。 また、描画点データ取得手段を、画像データと線との交点の位置に基づいて描画点データを取得するものとすることができる。
また、画像データに表されまたは画像データから求められる画像の輪郭と、線との交点を示す交点配置情報を取得する交点配置情報取得手段を備えるものとし、描画点データ取得手段を、交点配置情報取得手段により取得された交点配置情報に基づいて描画点データを取得するものとすることができる。
また、線を、複数の描画点に対応する複数の位置座標を結ぶものとすることができる。
また、線を、時系列に並ぶ複数の描画点に対応する複数の位置座標を結ぶものとすることができる。
また、描画点データに基づいて描画点を形成する描画点形成領域を、描画対象に対して相対的に移動させるとともに、その移動に応じて描画点を描画対象上に順次形成して描画対象上に画像を描画する際に用いられる描画点データを取得する描画点データ取得装置であって、線を、時系列に並ぶ複数の描画点に対応する複数の位置座標を結ぶものとすることができる。
また、描画点データに基づいて描画点を形成する描画点形成領域を、描画対象に対して相対的に移動させるとともに、その移動に応じて描画点を描画対象上に順次形成して描画対象上に画像を描画する際に用いられる描画点データを取得する描画点データ取得装置であって、線を、描画対象上におけるまたは描画対象上の画像空間上における描画点形成領域の描画軌跡に対応するものとすることができる。
また、描画点データに基づいて描画点を形成する描画点形成領域を複数有する描画点形成領域群を、描画対象に対して相対的に移動させるとともに、その移動に応じて描画点形成領域群に対応する描画点群を描画対象上に順次形成して描画対象上に画像を描画する際に用いられる描画点データを取得する描画点データ取得装置であって、線を、描画対象上の所定位置における描画点形成領域群の少なくとも一部の描画点形成領域を結ぶ線に対応するものとすることができる。
また、線にサンプリングピッチを付随させるようにすることができる。
また、描画点データ取得手段を、画像データに基づいて決定される画像領域と上記位置座標を含む所定領域とを重ね合わせ、上記所定領域が重なる画像領域の画像データに基づいて描画点データを取得するものとすることができる。
また、描画点データに基づいて描画点を形成する描画点形成領域を複数有する描画点形成領域群を、描画対象に対して相対的に移動させるとともに、その移動に応じて描画点形成領域群に対応する描画点群を描画対象上に順次形成して描画対象上に画像を描画する際に用いられる描画点データを取得する描画点データ取得装置であって、所定領域を、描画対象上の所定位置における描画点形成領域群の少なくとも一部の領域に対応するものとすることができる。
本発明の第2の描画点データ取得装置は、描画点データに基づいて描画点を形成する描画点形成領域を、描画対象に対して相対的に移動させるとともに、その移動に応じて描画点を描画対象上に順次形成して描画対象上に画像を描画する際に用いられる描画点データを取得する描画点データ取得装置において、画像の描画のための描画対象上におけるまたは描画対象上の画像空間上における描画点形成領域の描画軌跡の情報を取得する描画軌跡情報取得手段と、画像の元のベクトル形式の画像データを取得し、その取得した画像データにより表わされまたは画像データから求められる画像の輪郭と描画軌跡情報に対応する画像データ上における描画点データ軌跡との交点の配置を示す交点配置情報を取得する交点配置情報取得手段と、交点配置情報取得手段により取得された交点配置情報に基づいて描画軌跡に対応した描画点データを取得する描画点データ取得手段とを備えたことを特徴とする。
また、上記本発明の第2の描画点データ取得装置においては、描画点データ取得手段を、描画点データ軌跡を交点配置情報により示される交点により区切って部分描画点データ軌跡とし、部分描画点データ軌跡に、その部分描画点データ軌跡の並ぶ順に2値化データを交互に割り当て、部分描画点データ軌跡毎に割り当てられた2値化データを、上記移動の方向に対応する画像データ上の走査方向について所定間隔でサンプリングして描画点データ軌跡に対応した描画点データを取得するようにすることができる。
また、描画点データ取得手段を、交点配置情報の上記移動の方向に対応する画像データ上の走査方向の座標値を取得し、その取得した座標値を、画像データ上の走査方向の所定間隔の値でそれぞれ除算して量子化値を求め、画像データ上の走査方向に隣接する量子化値の差を求め、その差をランレングスデータとして取得し、その取得されたランレングスデータをデコードして描画点データ軌跡に対応した描画点データを取得するようにすることができる。
また、予め設定された描画対象の所定相対移動速度に対する画像の描画の際の描画対象の実移動速度の変動を示す速度変動情報を取得する速度変動情報取得手段をさらに備えるものとし、描画点データ取得手段を、速度変動情報取得手段により取得された速度変動情報に基づいて、描画対象の実移動速度が相対的に遅い描画対象上の描画領域ほど描画点データの数が多くなるように上記所定間隔を変化させて描画点データを取得するようにすることができる。
また、描画対象上の所定位置に予め設けられた複数の基準マークを検出してその基準マークの位置を示す検出位置情報を取得する位置情報検出手段をさらに備えるものとし、描画軌跡情報取得手段を、位置情報検出手段により取得された検出位置情報に基づいて描画軌跡情報を取得するようにすることができる。
また、予め設定された描画対象の所定相対移動方向に対する画像の描画の際の描画対象の実移動方向のずれ情報を取得するずれ情報取得手段をさらに備えるものとし、描画点軌跡情報取得手段を、ずれ情報取得手段により取得されたずれ情報に基づいて描画軌跡情報を取得するものとすることができる。
また、予め設定された描画対象の所定相対移動方向に対する画像の描画の際の描画対象の実移動方向のずれ情報を取得するずれ情報取得手段をさらに備えるものとし、描画点軌跡情報取得手段を、ずれ情報取得手段により取得されたずれ情報および位置情報検出手段により取得された検出位置情報に基づいて描画軌跡情報を取得するものとすることができる。
本発明の第1の描画装置は、描画点データに基づいて描画点を描画対象上に形成して描画対象上に画像を描画する描画装置において、描画対象上における描画点を形成すべき位置に対応する、画像の元のベクトル形式の画像データ上の位置座標を取得する位置座標取得手段と、画像の元のベクトル形式の画像データを取得し、その取得したベクトル形式の画像データと上記位置座標取得手段により取得された位置座標とに基づいて描画点の描画点データを取得する描画点データ取得手段と、描画点データ取得手段により取得した描画点データに基づいて描画点を描画対象上に形成する描画手段とを備えたことを特徴とする。
また、上記本発明の第1の描画装置においては、描画点データ取得手段を、画像データに基づいて決定される画像領域と上記位置座標とを重ね合わせ、上記位置座標が属する画像領域の画像データに基づいて描画点データを取得するものとすることができる。
また、描画点データに基づいて描画点を形成する描画点形成領域を、描画対象に対して相対的に移動させるとともに、その移動に応じて描画点を描画対象上に順次形成して描画対象上に画像を描画する描画装置であって、上記位置座標を、描画対象上の所定位置における描画点形成領域に対応するものとすることができる。
また、描画点データ取得手段を、画像データに基づいて決定される画像領域と上記位置座標を含む線とを重ね合わせ、上記線が重なる画像領域の画像データに基づいて描画点データを取得するものとすることができ。
また、描画点データ取得手段を、画像データと線との交点の位置に基づいて描画点データを取得するものとすることができる。
また、画像データに表されまたは画像データから求められる画像の輪郭と、線との交点を示す交点配置情報を取得する交点配置情報取得手段を備えるものとし、描画点データ取得手段を、交点配置情報取得手段により取得された交点配置情報に基づいて描画点データを取得するものとすることができる。
また、線を、複数の描画点に対応する複数の位置座標を結ぶものとすることができる。
また、線を、時系列に並ぶ複数の描画点に対応する複数の位置座標を結ぶものとすることができる。
また、描画点データに基づいて描画点を形成する描画点形成領域を、描画対象に対して相対的に移動させるとともに、その移動に応じて描画点を描画対象上に順次形成して描画対象上に画像を描画する描画装置であって、線を、時系列に並ぶ複数の描画点に対応する複数の位置座標を結ぶものとすることができる。
また、描画点データに基づいて描画点を形成する描画点形成領域を、描画対象に対して相対的に移動させるとともに、その移動に応じて描画点を描画対象上に順次形成して描画対象上に画像を描画する描画装置であって、線を、描画対象上におけるまたは描画対象上の画像空間上における描画点形成領域の描画軌跡に対応するものとすることができる。
また、描画点データに基づいて描画点を形成する描画点形成領域を複数有する描画点形成領域群を、描画対象に対して相対的に移動させるとともに、その移動に応じて描画点形成領域群に対応する描画点群を描画対象上に順次形成して描画対象上に画像を描画装置であって、線を、描画対象上の所定位置における描画点形成領域群の少なくとも一部の描画点形成領域を結ぶ線に対応するものとすることができる。
また、線にサンプリングピッチの情報を付随させるようにすることができる。
また、描画点データ取得手段を、画像データに基づいて決定される画像領域と上記位置座標を含む所定領域とを重ね合わせ、上記所定領域が重なる画像領域の画像データに基づいて描画点データを取得するものとすることができる。
また、描画点データに基づいて描画点を形成する描画点形成領域を複数有する描画点形成領域群を、描画対象に対して相対的に移動させるとともに、その移動に応じて描画点形成領域群に対応する描画点群を描画対象上に順次形成して描画対象上に画像を描画する描画装置であって、上記所定領域を、描画対象上の所定位置における描画点形成領域群の少なくとも一部の領域に対応するものとすることができる。
本発明の第2の描画装置は、描画点データに基づいて描画点を形成する描画点形成領域を、描画対象に対して相対的に移動させるとともに、その移動に応じて描画点を描画対象上に順次形成して描画対象上に画像を描画する描画装置において、画像の描画のための描画対象上におけるまたは描画対象上の画像空間上における描画点形成領域の描画軌跡の情報を取得する描画軌跡情報取得手段と、画像の元のベクトル形式の画像データを取得し、その取得した画像データにより表わされまたは画像データから求められる画像の輪郭と描画軌跡情報に対応する画像データ上における描画点データ軌跡との交点の配置を示す交点配置情報を取得する交点配置情報取得手段と、交点配置情報取得手段により取得された交点配置情報に基づいて描画軌跡に対応した複数の描画点データを取得する描画点データ取得手段と、描画点データ取得手段により取得した描画点データに基づいて描画点形成領域によって描画点を描画対象上に形成する描画手段とを備えたことを特徴とする。
また、上記本発明の第2の描画装置においては、描画点データ取得手段を、描画点データ軌跡を交点配置情報により示される交点により区切って部分描画点データ軌跡とし、部分描画点データ軌跡に、その部分描画点データ軌跡の並ぶ順に2値化データを交互に割り当て、部分描画点データ軌跡毎に割り当てられた2値化データを、上記移動の方向に対応する画像データ上の走査方向について所定間隔でサンプリングして描画点データ軌跡に対応した描画点データを取得するものとすることができる。
また、描画点データ取得手段を、交点配置情報の上記移動の方向に対応する画像データ上の走査方向の座標値を取得し、その取得した座標値を、画像データ上の走査方向の所定間隔の値でそれぞれ除算して量子化値を求め、画像データ上の走査方向に隣接する量子化値の差を求め、その差をランレングスデータとして取得し、その取得されたランレングスデータをデコードして描画点データ軌跡に対応した描画点データを取得するものとすることができる。
また、予め設定された描画対象の所定相対移動速度に対する画像の描画の際の描画対象の実移動速度の変動を示す速度変動情報を取得する速度変動情報取得手段をさらに備え、描画点データ取得手段を、速度変動情報取得手段により取得された速度変動情報に基づいて、描画対象の実移動速度が相対的に遅い描画対象上の描画領域ほど描画点データの数が多くなるように上記所定間隔を変化させて描画点データを取得するようにすることができる。
また、描画対象上の所定位置に予め設けられた複数の基準マークを検出してその基準マークの位置を示す検出位置情報を取得する位置情報検出手段をさらに備えるものとし、描画軌跡情報取得手段を、位置情報検出手段により取得された検出位置情報に基づいて描画軌跡情報を取得するものとすることができる。
また、予め設定された描画対象の所定相対移動方向に対する画像の描画の際の描画対象の実移動方向のずれ情報を取得するずれ情報取得手段をさらに備えるものとし、描画点軌跡情報取得手段を、ずれ情報取得手段により取得されたずれ情報に基づいて描画軌跡情報を取得するものとすることができる。
また、予め設定された描画対象の所定相対移動方向に対する画像の描画の際の描画対象の実移動方向のずれ情報を取得するずれ情報取得手段をさらに備えるものとし、描画点軌跡情報取得手段を、ずれ情報取得手段により取得されたずれ情報および位置情報検出手段により取得された検出位置情報に基づいて描画軌跡情報を取得するものとすることができる。
ここで、上記「描画点形成領域」とは、描画対象上に描画点を形成する領域であれば如何なるものによって形成される領域でもよく、たとえば、DMDのような空間光変調素子の各変調素子によって反射されたビーム光によって形成されるビームスポットでもよいし、光源から発せられたビーム光自体によって形成されるビームスポットでもよいし、もしくはインクジェット方式のプリンタの各ノズルから吐出されたインクが付着する領域としてもよい。
また、上記「描画点データ軌跡を交点配置情報により示される交点により区切って部分描画点データ軌跡とする」とは、描画点データ軌跡を全ての交点で区切って部分描画点データ軌跡を取得するようにしてもよいし、たとえば、2つの画像が重なって一方の画像の一部が他方の画像の内側に存在するような場合には、その部分については、内側の画像の輪郭と描画点データ軌跡との交点については存在しないものして部分描画点データ軌跡を取得するようにしてもよい。
また、「2値化データ」としては、0データと1データとを用いるようにしてもよいし、その他の2値化されたデータを用いるようにしてもよい。
なお、本発明における描画点データは2値データに限らず、たとえば、ベクトル形式の画像データが多値の情報を有する場合などにおいては、その多値情報を用いて、描画点データとして多値データを取得するようにしてもよい。
本発明の描画点データ取得方法および装置並びに描画方法および装置によれば、画像の元のベクトル形式の画像データを取得し、そのベクトル形式の画像データから直接描画点データを取得するようにしたので、従来のようにベクトル形式の画像データをラスター形式の画像データに変換することなくベクトル形式の画像データから直接描画点データを取得することができ、処理速度の低下およびコストアップを招くことなく、描画精度の向上を図ることができる。
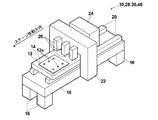
以下、図面を参照して本発明の描画点データ取得方法および装置並びに描画方法および装置の第1の実施形態を用いた露光装置について詳細に説明する。図1は、本発明の第1の実施形態を用いた露光装置の概略構成を示す斜視図である。本発明の第1の実施形態を用いた露光装置は、多層プリント配線板の各層の配線パターンを露光する装置であって、その各層の配線パターンを露光するために用いられる露光点データの取得方法に特徴を有するものであるが、まずは、露光装置の概略構成について説明する。
露光装置10は、図1に示すように、基板12を表面に吸着して保持する平板状の移動ステージ14を備えている。そして、4本の脚部16に支持された厚い板状の設置台18の上面には、ステージ移動方向に沿って延びた2本のガイド20が設置されている。移動ステージ14は、その長手方向がステージ移動方向を向くように配置されると共に、ガイド20によって往復移動可能に支持されている。
設置台18の中央部には、移動ステージ14の移動経路を跨ぐようにコの字状のゲート22が設けられている。コの字状のゲート22の端部の各々は、設置台18の両側面に固定されている。このゲート22を挟んで一方の側にはスキャナ24が設けられ、他方の側には基板12の先端および後端と、基板12に予め設けられている円形状の複数の基準マーク12aの位置とを検知するための複数のカメラ26が設けられている。
ここで、基板12における基準マーク12aは、予め設定された基準マーク位置情報に基づいて基板12上に形成された、たとえば孔である。なお、孔の他にランドやヴィアやエッチングマークを用いてもよい。また、基準マーク12aとして、基板12上に露光される、回路パターンの一部などの所定のパターンを利用するようにしてもよい。また、図1においては、基準マーク12aを6個しか示していないが実際には多数の基準マーク12aが設けられている。また、基準マーク12aとして、基板12のエッジを検出するようにしてもよい。
スキャナ24およびカメラ26はゲート22に各々取り付けられて、移動ステージ14の移動経路の上方に固定配置されている。なお、スキャナ24およびカメラ26は、これらを制御する後述するコントローラに接続されている。
スキャナ24は、図2および図3(B)に示すように、2行5列の略マトリックス状に配列された10個の露光ヘッド30(30A〜30J)を備えている。
各露光ヘッド30の内部には、図4に示すように入射された光ビームを空間変調する空間光変調素子(SLM)であるデジタル・マイクロミラー・デバイス(DMD)36が設けられている。DMD36は、マイクロミラー38が直交する方向に2次元状に多数配列されたものであり、そのマイクロミラー38の列方向が走査方向と所定の設定傾斜角度θをなすように取り付けられている。したがって、各露光ヘッド30による露光エリア32は、走査方向に対して傾斜した矩形状のエリアとなる。ステージ14の移動に伴い、基板12には露光ヘッド30ごとに帯状の露光済み領域34が形成される。なお、各露光ヘッド30に光ビームを入射する光源については図示省略してあるが、たとえば、レーザ光源などを利用することができる。
露光ヘッド30の各々に設けられたDMD36は、マイクロミラー38単位でオン/オフ制御され、基板12には、DMD36のマイクロミラー38に対応したドットパターン(黒/白)が露光される。前述した帯状の露光済み領域34は、図4に示すマイクロミラー38に対応した2次元配列されたドットによって形成される。二次元配列のドットパターンは、走査方向に対して傾斜されていることで、走査方向に並ぶドットが、走査方向と交差する方向に並ぶドット間を通過するようになっており、高解像度化を図ることができる。なお、傾斜角度の調整のバラツキによって、利用しないドットが存在する場合もあり、たとえば、図4では、斜線としたドットは利用しないドットとなり、このドットに対応するDMD36におけるマイクロミラー38は常にオフ状態となる。
また、図3(A)および(B)に示すように、帯状の露光済み領域34のそれぞれが、隣接する露光済み領域34と部分的に重なるように、ライン状に配列された各行の露光ヘッド30の各々は、その配列方向に所定間隔ずらして配置されている。このため、たとえば、1行目の最も左側に位置する露光エリア32A、露光エリア32Aの右隣に位置する露光エリア32Cとの間の露光できない部分は、2行目の最も左側に位置する露光エリア32Bにより露光される。同様に、露光エリア32Bと、露光エリア32Bの右隣に位置する露光エリア32Dとの間の露光できない部分は、露光エリア32Cにより露光される。
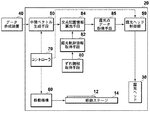
次に、露光装置10の電気的構成について説明する。露光装置10は、図5に示すように、CAM(Computer Aided Manufacturing)ステーションを有するデータ作成装置40から出力された、基板12に露光すべき露光画像を表わすベクトル形式の露光画像データを取得し、その取得したベクトル形式の露光画像データに基づいて、後述する中間ベクトルデータを生成する中間ベクトル生成手段50、カメラ26により撮影された基準マーク12aの画像に基づいて基準マーク12aの検出位置情報を取得する検出位置情報取得手段52と、検出位置情報取得手段52により取得された検出位置情報に基づいて、実際の露光の際の基板12上における各マイクロミラー38の露光軌跡の情報を取得する露光軌跡情報取得手段54と、露光軌跡情報取得手段54により取得された各マイクロミラー38毎の露光軌跡情報と中間ベクトル生成手段50から出力された中間ベクトルデータに基づいて、上記露光軌跡情報に対応する上記中間ベクトルデータ上における露光点データ軌跡と中間ベクトルデータによって表わされるベクトルとの交点の配置を示す交点配置情報を算出する交点配置情報算出手段56と、交点配置情報算出手段56により算出された交点配置情報に基づいて、各マイクロミラー38毎の露光点データ軌跡に対応する露光点データを取得する露光点データ取得手段58と、露光点データ取得手段58により取得された各マイクロミラー38毎の露光点データに基づいて露光ヘッド30のDMD36を制御する露光ヘッド制御部59と、移動ステージ14をステージ移動方向へ移動させる移動機構60と、本露光装置全体を制御するコントローラ70とを備えている。なお、移動機構60は、移動ステージ14をガイド20に沿って往復移動させるものであれば如何なる既知の構成を採用してもよい。また、上記中間ベクトルデータ、上記露光点データ軌跡および交点配置置情報などや、上記各構成要素の作用については後で詳述する。
次に、上記第1の実施形態を用いた露光装置10の作用について図面を参照しながら説明する。
まず、データ作成装置40において、基板12に露光すべき露光画像の元のベクトル形式の露光画像データが作成される。そして、そのベクトル形式の露光画像データは中間ベクトル生成手段50に入力され、中間ベクトル生成手段50は、入力されたベクトル形式の露光画像データに基づいて中間ベクトルデータを生成する。中間ベクトルデータとは、ベクトル形式の露光画像データにより表わされる露光画像の輪郭をベクトル形式のデータで表わしたものある。図6(A)にベクトル形式の露光画像データで表わされる露光画像の一例を示すとともに、図6(B)に図6(A)で示される露光画像の露光画像データに基づいて生成された中間ベクトルデータによって表わされるベクトルを示す。なお、図6(A)における斜線部分が露光画像データにより表わされる露光画像であり、図6(B)における矢印が中間ベクトルデータによって表わされるベクトルである。また、ここでいうベクトルとは、直線により表わされるものだけでなく、図6(B)に示すように曲線により表わされるものも含むものとする。中間ベクトルデータの生成方法については、たとえば、上記ベクトル形式の露光画像データが領域ベクトルデータである場合には、その領域ベクトルデータにおける輪郭を示すデータを用いて中間ベクトルデータを生成するようにすればよい。また、上記ベクトル形式の露光画像データが線分の方向を示すデータとその線分の太さを示すデータからなるものである場合には、上記太さを示すデータに基づいて領域ベクトルデータに変換し、その領域ベクトルデータにおける輪郭を示すデータを用いて中間ベクトルデータを生成するようにすればよい。
なお、中間ベクトルデータを形成する際に、輪郭を表すベクトルを境界として一方の側がオンであるかオフであるかを示す情報を付加しておいてもよい。たとえば、Yが増える方向がオンもしくはオフ(Y方向に平行なベクトルの場合はXが増える方向がオンもしくはオフ)という情報を付加してもよいし、予め始点から終点に向いて右側がオンで左側がオフと決めた上で輪郭ベクトルを生成してもよい。このように中間ベクトルデータを形成しておくことによって、後述する露光点データの取得の際に、オンとオフの割り振りを容易に行うことができる。
また、本実施形態においては、図6(A)に示すように、2つの露光画像が重なって配置されている場合には、図6(B)および図7に示すように、2つの露光画像を結合して1本の輪郭により表わされる1つの露光画像とし、その1つの露光画像の中間ベクトルデータを生成するものとする。ただし、このような態様に限られることなく、重なった2つの露光画像について、それぞれの中間ベクトルデータを生成するようにしてもよい。
そして、上記のようにして生成された中間ベクトルデータは、中間ベクトル生成手段50から交点配置情報算出手段56に出力される。
一方、上記のように中間ベクトルデータが生成されるとともに、各露光ヘッド30のDMD36の各マイクロミラー38毎の、実際の露光の際の基板12上における露光軌跡の情報が取得される。なお、多層基板を形成するときには、下層のパターンに合わせて上層のパターンを描画する必要があるが、その場合には、基板上の画像空間上における露光軌跡が規定されることになる。
具体的には、露光装置10全体の動作を制御するコントローラ70が移動機構60に制御信号を出力し、移動機構60はその制御信号に応じて移動ステージ14を図1に示す位置からガイド20に沿って一旦上流側に移動させた後、ステージ移動方向へ所望の速度で移動させる。
そして、上記のようにして移動する移動ステージ14上の基板12が複数のカメラ26の下を通過する際、これらのカメラ26により基板12が撮影され、その撮影画像を表す撮影画像データが検出位置情報取得手段52に入力される。検出位置情報取得手段52は、入力された撮影画像データに基づいて基板12の基準マーク12aの位置を示す検出位置情報を取得する。基準マーク12aの検出位置情報の取得方法については、たとえば、円形状の画像を抽出することにより取得するようにすればよいが、他の如何なる既知の取得方法を採用してもよい。また、上記基準マーク12aの検出位置情報は、具体的には座標値として取得されるが、その座標値の原点は、たとえば、基板12の撮影画像データの4つの角のうちの1つの角のとしてもよいし、撮影画像データにおける予め設定された所定の位置でもよいし、複数の基準マーク12aのうちの1つの基準マーク12aの位置としてもよい。なお、上記検出位置情報と基準マーク位置情報の座標系は一致しているものとする。また、本実施形態においては、カメラ26と検出位置情報取得手段52とにより位置情報検出手段が構成されている。
そして、上記のようにして取得された基準マーク12aの検出位置情報は、検出位置情報取得手段52から露光軌跡情報取得手段54に出力される。
そして、露光軌跡情報取得手段54において、入力された検出位置情報に基づいて、実際の露光の際の基板12上における各マイクロミラー38毎の露光軌跡の情報が取得される。具体的には、露光軌跡情報取得手段54には、予め各露光ヘッド30のDMD36の各マイクロミラー38が通過する位置を示す通過位置情報が、各マイクロミラー38毎に設定されている。上記通過位置情報は、移動ステージ14上の基板12の設置位置に対する、各露光ヘッド30の設置位置によって決定されるものであって予め設定されている。そして、上記基準マーク位置情報および上記検出位置情報と同じ点を原点として、ベクトルまたは複数点の座標値で表わされるものである。なお、通過位置情報の座標系も、上記基準マーク位置情報および上記検出位置情報の座標系と一致しているものとする。図8に、プレスエ程などを経ていない理想的な形状の基板12、つまり、歪などの変形が生じておらず、基準マーク12aが予め設定された基準マーク位置情報12bの示す位置に配置している基板12と、所定のマイクロミラー38の通過位置情報12cとの関係を示す模式図を示す。なお、基板12上におけるビームスポットの位置を測定した結果に基づいて、通過位置情報を求めるようにしてもよい。
そして、露光軌跡情報取得手段54において、図9に示すように、走査方向に直交する方向について隣接する検出位置情報12dを結ぶ直線と各マイクロミラー38の通過位置情報12cにより表わされる直線との交点の座標値が求められる。つまり、図9における×印の点の座標値が求められ、さらに、×印とその×印に上記直交する方向に隣接する各検出位置情報12dとの距離が求められ、上記隣接する検出位置情報12dのうちの一方の検出位置情報12dと×印との距離と、他方の検出位置情報12dと×印との距離との比が求められる。具体的には、図9におけるa1:b1、a2:b2、a3:b3およびa4:b4が露光軌跡情報として求められる。上記ようにして求められた比が、変形後の基板12上におけるマイクロミラー38の露光軌跡を表わしていることになる。つまり、実際の露光の際の基板12上におけるマイクロミラー38の露光軌跡(基板12上の画像空間上の露光軌跡)を表わしていることになる。
そして、上記のようにして各マイクロミラー38毎に求められた露光軌跡情報が、交点配置情報算出手段56に入力される。
交点配置情報算出手段56には、図10に示すような、中間ベクトルデータの座標系が予め設定されている。なお、上記中間ベクトルデータの座標系は露光画像データの座標系でもあり、この座標系と、基準マーク位置情報、検出位置情報および通過位置情報の座標系は全て一致しているものとする。そして、座標系には、図10に示すように、上記基準マーク位置情報12bが示す位置に対応した位置に露光画像データ基準位置情報12eが配置されている。そして、交点配置情報算出手段56においては、まず、走査方向に直交する方向に隣接する露光画像データ基準位置情報12eを結ぶ直線を、上記のようにして求めた露光軌跡情報の示す比に基づいて分割した点の座標値が求められる。つまり、以下の式を満たすような点の座標値が求められる。
a1:b1=A1:B1
a2:b2=A2:B2
a3:b3=A3:B3
a4:b4=A4:B4
そして、上記のようにして求められた分割点を結ぶ直線が求められる。上記直線は、実際の露光の際の基板12上におけるマイクロミラー38の露光軌跡に対応する露光画像データ上における露光点データ軌跡を示すものである。
なお、上記のように露光軌跡情報の示す比に基づいて求められた分割点を直線で結び、その直線を露光点データ軌跡としてもよいし、上記分割点をスプライン補間などによって曲線で結び、その曲線を露光点データ軌跡として取得するようにしてもよい。上記のようにスプライン補間などによって曲線で結ぶようにすれば、より基板12の変形に忠実な露光点データ軌跡を取得することができる。また、上記スプライン補間などの演算方法に基板12の材質の特性(たとえば、特定の方向にしか伸縮しないなど)を反映するようにすれば、さらに、より基板12の変形に忠実な露光点データ軌跡を取得することができる。
そして、図11に示すように、上記のようにして求められた露光点データ軌跡と中間ベクトルデータとが同じ座標系にプロットされ、中間ベクトルデータによって表わされるベクトルと露光点データ軌跡との交点の配置情報が求められる。交点配置情報とは、ここでは、上記交点の座標値である。つまり、図11に示す交点A〜Fの座標値が取得される。なお、図11に示す交点A〜Fで区切られた露光点データ軌跡が、部分描画点データ軌跡である。
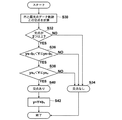
ここで、上記交点配置情報の算出の方法について具体的に説明する。ここでは、たとえば、中間ベクトルデータによって表わされるベクトルが下式(1)で表わされる線分であり、露光点データ軌跡が下式(2)で表わされる線分である場合の交点配置情報の算出方法について、図12のフローチャートを用いて説明する。
x=a1y+b1,xs1≦x≦xe1,ys1≦y≦ye1 ・・・(1)
x=a2y+b2,xs2≦x≦xe2,ys2≦y≦ye2 ・・・(2)
図12のフローチャートに示すように、まず、式(1)におけるa1と式(2)におけるa2とが比較され、つまり両直線の傾きが比較され(S10)、これらが同じである場合には、交点がないものとして演算を終了する(S12)。一方、S10においてa1とa2が異なる値である場合には、交点の計算が行われる(S14)。具体的には以下の演算により交点のx座標とy座標とが算出される。
a1y+b1=a2y+b2より
y=(b2−b1)/(a1−a2)
x=a1y+b1
そして、次に、上記のようにして求められた交点のy座標の大きさをys2およびye2と比較することによって、上記交点が露光点データ軌跡上に存在するか否かが確認される(S16)。そして、ys2<y≦ye2を満たさない場合には、交点がないものとして演算を終了する(S12)。一方、ys2<y≦ye2を満たす場合には、ys1とye1が同じ値かどうかを確認することによって、中間ベクトルデータによって表わされるベクトルがx軸に対して平行かどうかが確認される(S18)。そして、上記ベクトルがx軸に対して平行でない場合には、y座標の大きさをys1とye1と比較することによって、上記のようにしても求めた交点が、中間ベクトルデータによって表わされるベクトル上に存在するか否かが確認される(S20)。そして、ys1<y≦ye1を満たさない場合には、交点がないものとして演算を終了する(S12)。一方、ys1<y≦ye1を満たす場合には、交点があるものとして上記のようにして求めたx座標、y座標が取得される。また、S18において、中間ベクトルデータによって表わされるベクトルがx軸に対して平行であると確認された場合には、x座標の大きさをxs1とxe1と比較することによって、上記のようにして求めた交点が、中間ベクトルデータによって表わされるベクトル上に存在するか否かが確認される(S22)。そして、xs1<x≦xe1を満たさない場合には、交点がないものとして演算を終了する(S24)。一方、xs1<x≦xe1を満たす場合には、交点があるものとして上記ようにして求めたx座標、y座標が取得される。
次に、中間ベクトルデータによって表わされるベクトルが下式(3)で表わされる曲線(円弧)であり、露光点データ軌跡が下式(4)で表わされる線分である場合の交点配置情報の算出方法について、図13のフローチャートを用いて説明する。
(x−a1)2+(y−b1)2=c2 ・・・(3)
x=a2y+b2,xs≦x≦xe,ys≦y≦ye ・・・(4)
図13のフローチャートに示すように、まず、上式(3)と上式(4)とに基づいて、これらの交点が計算される(S30)。なお、ここでは、上式(3)を下式(5)のように、上式(4)を下式(6)のように円の中心を原点とした座標系に変換した後、これらの交点(X,Y)が求められる。
X=x−a1,Y=y−b1とすると上式(3)は、
X2+Y2=c2 ・・・(5)
同じくX=x−a1,Y=y−b1とすると上式(4)は、
X=a2Y+d,d=b2+a2b1−a1,
xs−a1≦X≦xe−a1,ys−b1≦Y≦ye−b1 ・・・(6)
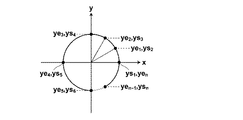
そして、上式(5)および上式(6)に基づいて求められた交点が0または1つである場合には、交点なしとして演算を終了する(S34)。なお、ここでは、接点は交点ではないとしている。一方、交点が2つ以上ある場合には、Y座標の大きさを(ys−b1)と(ye―b1)と比較することによって、上記のようにしても求められた交点が露光点データ軌跡上に存在するか否かが確認される(S36)。そして、ys−b1<Y≦ye−b1を満たさない場合には交点なしとして演算を終了する(S34)。一方、ys−b1<Y≦ye−b1を満たす場合には、Y座標の大きさがysnおよびyen(nは1以上の自然数)と比較されることによって、上記のようにしても求められた交点が上式(5)で示される円上のいずれかの円弧上に存在するか否かが確認される。なお、上記ysnおよびyenは、図14に示すように円弧のベクトルを各象限毎に分割した際におけるそれぞれの円弧のY座標の範囲を示す値である。そして、ysn<Y≦yenを満たさない場合には交点はないものとして演算を終了する(S34)。一方、ysn<Y≦yenを満たす場合には、上式(5)で示される円上のいずれかの円弧上に上記交点が存在するものとする(S40)。そして、S38において交点があるとされた場合には、下式(7)を計算することによってY座標を元の座標系に戻し、交点のy座標を取得する(S42)。
y=Y+b1 ・・・(7)
そして、上記のようにして取得された交点A〜Fのy座標が露光点データ取得手段58に出力され、露光点データ取得手段58において、入力された交点y座標に基づいて各マイクロミラー38毎の露光点データ列が取得される。具体的には、露光点データ取得手段58は、図15に示すように、交点A〜Fのy座標をプロットし、そのプロットされたy座標に基づいて2値化露光点データを割り当てる。なお、図15に示すy座標−1は、マイクロミラー38の初期位置に対応するy座標の値である。
そして、さらに、図15に示すように、y座標−1〜10までの間の間隔を0.5のピッチで区切り、y座標−1から10までの間を0.5ピッチで2値化露光画像データをサンプリングして露光点データを取得して、図15に示すような、各マイクロミラー38毎の露光点データ列を取得する。なお、後述するようにピッチが一定でない場合もある。
そして、上記と同様にして、各マイクロミラー38毎について露光点データ列がそれぞれ取得され、その各マイクロミラー38毎の露光点データ列が露光ヘッド制御部59に出力される。
一方、上記のように各マイクロミラー38毎の露光点データ列が露光ヘッド制御部59に出力されるとともに、移動ステージ14が、図1に示す下流側の位置から上流側へ所望の速度で移動させられる。
そして、基板12の先端がカメラ26により検出されると露光が開始される。具体的には、露光ヘッド制御部59から各露光ヘッド30のDMD36に上記露光点データに基づいた制御信号が出力され、露光ヘッド30は入力された制御信号に基づいてDMD36のマイクロミラーをオン・オフさせて基板12を露光する。
なお、露光ヘッド制御部59から各露光ヘッド30へ制御信号が出力される際には、基板12に対する各露光ヘッド30の各位置に対応した制御信号が、移動ステージ14の移動にともなって順次露光ヘッド制御部59から各露光ヘッド30に出力されるが、このとき、たとえば、図16に示すように、各マイクロミラー38毎に取得されたm個の露光点データ列の各列から、各露光ヘッド30の各位置に応じた露光点データを1つずつ順次読み出して各露光ヘッド30のDMD36に出力するようにしてもよいし、図16に示すように取得された露光点データ列に90度回転処理もしくは行列を用いた転置変換などを施し、図17に示すように、基板12に対する各露光ヘッド30の各位置に応じたフレームデータ1〜mを生成し、このフレームデータ1〜mを各露光ヘッド30に順次出力するようにしてもよい。
なお、上記第1の実施形態においては、露光点データ取得手段58における露光点データの取得方法については、上記のような取得方法に限らず、たとえば、図18に示すように、取得された交点のy座標の値をサンプリングピッチである0.5でそれぞれ割った後、整数化して量子化値を取得し、その隣接する量子化値の差をそれぞれ取得してこの差をランレングスデータとみなし、これをデコードすることによって、図18に示すような露光点データ列を取得するようにしてもよい。なお、上記のようにして露光点データ列を取得する際、露光点データ列の先頭にマイクロミラーの初期位置に対応する0のデータを付加するようにすれば、図15に示す露光点データ列と同様のものを取得することができる。
なお、上記説明においては、プレス工程などにおいて変形した基板12に露光する際の露光点データの取得方法について説明したが、変形してない理想的な形状の基板12に露光する際についても、上記と同様の方法を採用して露光点データを取得することができる。また、基板の変形を考慮する必要がない場合も同様である。これらの場合には、基板12上における露光軌跡に基づいて、輪郭ベクトルと露光点データ軌跡との交点が求められる。
さらに、たとえば、図19に示すように、走査方向について基板12が伸縮している場合には、その伸縮の程度に応じて、露光点データ取得手段58において、露光点データのサンプリングピッチを変化させるようにしてもよい。具体的には、たとえば、上記のように走査方向に基板12が伸縮し、検出位置情報12dと通過位置情報12cとが図19に示すような関係となり、走査方向に隣接する検出位置情報12dの間隔が、理想的な長さLの領域Aと、基板12が走査方向に伸びての上記間隔が長さLの2倍となった領域Bと、基板12が走査方向に縮んで上記間隔が長さLの1/2となった領域Cとが存在する場合には、たとえば、領域Aに対応する露光点データについては、サンプリングピッチを通常の0.5として露光点データをサンプリングし、領域Bに対応する露光点データについては、サンプリングピッチを通常のサンプリングピッチの1/2の0.25として露光点データをサンプリングし、領域Cの露光点データについては、サンプリングピッチを通常のサンプリングピッチの2倍の1.0として露光点データをサンプリングするようにしてもよい。なお、上記説明においては、基板12が走査方向にのみ伸縮した場合における露光点データの取得方法を説明したが、上記のような場合に限らず、その他の方向にも基板12が変形している場合においても、検出位置情報12dで区切られた領域毎に、マイクロミラー38の通過位置情報の長さが異なる場合には、上記と同様にその長さに応じてサンプリングピッチを変化させるようにしてもよい。上記のように基板12の伸縮に応じてサンプリングピッチを変化させるようにすれば、基板12上の所望の位置に所望の露光画像を露光することができる。
また、上記実施形態においては、露光軌跡情報取得手段54において、基準マーク位置情報と検出位置情報とに基づいて露光軌跡情報を取得するようにしたが、必ずしも基板12の変形を考慮して露光軌跡情報を取得するようにしなくてもよく、たとえば、露光軌跡情報取得手段54において、基板12の設置位置に対する各露光ヘッド30の設置位置によって予め設定された通過位置情報を露光軌跡情報として取得し、その通過位置情報を交点配置情報算出手段56に出力し、交点配置情報算出手段56において、通過位置情報と中間ベクトルデータによって表わされるベクトルとの交点を算出し、この交点のy座標に基づいて上記と同様にして露光点データを取得するようにしてもよい。上記のような場合には、必ずしも基準マーク12aを設ける必要はない。また、図1に示す基準マーク12aは、後述する実施形態においても、使用しない場合には必ずしも設ける必要はない。基板12の設置位置の誤差は、たとえば、基板12のエッジを検出することによって求めることができる。
次に、本発明の描画点データ取得方法および装置並びに描画方法および装置の第2の実施形態を用いた露光装置20について詳細に説明する。露光装置20の外観の概略構成については、図1に示す本発明の第1の実施形態を用いた露光装置10と同様である。
露光装置20は、図20に示すように、中間ベクトル生成手段50と、移動ステージ14のステージ移動方向と直交する方向へのずれ情報を取得するずれ情報取得手段80と、ずれ情報取得手段80に取得されたずれ情報に基づいて、実際の露光の際の基板12上における各マイクロミラー38の露光軌跡の情報を取得する露光軌跡情報取得手段82と、露光軌跡情報取得手段82により取得された各マイクロミラー38毎の露光軌跡情報と中間ベクトル生成手段50から出力された中間ベクトルデータに基づいて、上記露光軌跡情報に対応する上記中間ベクトルデータ上における露光点データ軌跡と中間ベクトルデータによって表わされるベクトルとの交点の配置を示す交点配置情報を算出する交点配置情報算出手段84と、交点配置情報算出手段84により算出された交点配置情報に基づいて各マイクロミラー38毎の露光点データを取得する露光点データ取得手段85と、露光ヘッド制御部59と、移動機構60と、本露光装置全体を制御するコントローラ70とを備えている。なお、図20において図5と同じ符号を付している構成については、上記本発明の第1の実施形態を用いた露光装置10とその作用は同様である。
次に、露光装置20の作用について図面を参照しながら説明する。
まず、中間ベクトル生成手段50から交点配置情報算出手段84に中間ベクトルデータを出力するまでの作用については上記と同様である。
そして、次に、ずれ情報取得手段80によって移動ステージ14のステージ移動方向への移動のずれ情報が取得される。ずれ情報とは、図21に示すように、予め設定されたステージ移動方向(所定相対移動方向)に対する、実際の移動ステージ14の移動方向(実移動方向)のずれを示したものである。具体的には、図21に示すように、予め設定されたステージ移動方向への移動軌跡に対する実際の移動ステージ14の移動軌跡の、ステージ移動方向に直交する方向についてのずれ量を所定の間隔で取得したものである。図21に示す点線矢印の向きと長さがずれ量を示すものである。
ここで、上記のように移動ステージ14の移動軌跡にずれがある場合、露光の際の各マイクロミラー38の基板12上における実際の露光軌跡は、図22に示すように、予め設定された各マイクロミラー38の通過位置情報12cに対して上記ずれ量に応じてずれることになる。したがって、各マイクロミラー38の実際の露光軌跡に対応した露光点データを取得する必要がある。また、図22に示すように、マイクロミラーm1とマイクロミラーm2とは、基板12上における同じ位置を通過するものであるが、上記のような移動ステージ14の移動軌跡にずれがあると、これらの実際の露光軌跡は位相がずれたものになる。したがって、これらの位相ずれも考慮して露光点データを取得する必要がある。
そこで、露光装置20においては、上記のような各マイクロミラー38の露光軌跡のずれ量に応じた露光点データが取得される。具体的には、予め移動ステージ14のずれ量が計測され、その計測されたずれ量が、上記のようにしてずれ量取得手段80によって取得される。そして、ずれ量取得手段80は、取得したずれ量を露光軌跡情報取得手段82に出力する。ずれ量の計測方法としては、たとえば、ICウェーハ・ステッパー装置などで利用されるレーザ光を用いた測定方法を用いることができる。たとえば、移動ステージ14に、ステージ移動方向に延びる反射面を設けるとともに、その反射面に向けてレーザ光を射出するレーザ光源および上記反射面において反射した反射光を検出する検出部を設け、移動ステージ14の移動にともなって、反射光の位相ずれを順次検出部により検出することによって上記ずれ量を計測することができる。
露光軌跡情報取得手段82には、各マイクロミラー38毎の通過位置情報12cが設定されており、露光軌跡情報取得手段82は、入力されたずれ量と各マイクロミラー38毎の通過位置情報12cに基づいて、露光の際の各マイクロミラー38毎の基板12上における実際の露光軌跡を表わす露光軌跡情報を取得する。なお、上記通過位置情報12cについては、上記第1の実施形態を用いた露光装置10の説明と同様である。
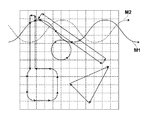
そして、その各マイクロミラー38毎の露光軌跡情報を交点配置情報算出手段84に出力する。交点配置情報算出手段84は、入力された露光軌跡情報を露光点データ軌跡として、図23に示すように、中間ベクトルデータと同じ座標系にプロットし、上記第1の実施形態と同様に、中間ベクトルデータによって表わされるベクトルと露光点データ軌跡との交点の配置情報を求める。なお、交点配置情報の算出方法については上記と同様である。
なお、図23に示す露光点データ軌跡M1は、図22に示すマイクロミラーm1の露光点データ軌跡であり、図23に示す露光点データ軌跡M2は、図22に示すマイクロミラーm2の露光点データ軌跡である。
そして、上記のようにして取得された交点配置情報のy座標の値が露光点データ取得手段85に出力され、露光点データ取得手段85において、入力された交点y座標に基づいて各マイクロミラー38毎の露光点データ列が取得される。露光点データ列の取得方法については上記と同様である。
そして、各マイクロミラー38毎について露光点データ列がそれぞれ取得され、その各マイクロミラー38毎の露光点データ列が露光ヘッド制御部59に出力される。
一方、上記のように各マイクロミラー38毎の露光点データ列が露光ヘッド制御部59に出力されるとともに、移動ステージ14が、図1に示す下流側の位置から上流側へ所望の速度で移動させられる。
そして、基板12の先端がカメラ26により検出されると露光が開始される。具体的には、露光ヘッド制御部59から各露光ヘッド30のDMD36に上記露光点データに基づいた制御信号が出力され、露光ヘッド30は入力された制御信号に基づいてDMD36のマイクロミラーをオン・オフさせて基板12を露光する。
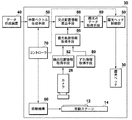
次に、本発明の描画点データ取得方法および装置並びに描画方法および装置の第3の実施形態を用いた露光装置30について詳細に説明する。
露光装置30は、図24に示すように、上記第1の実施形態を用いた露光装置10の構成と上記第2の実施形態を用いた露光装置20の構成とを両方兼ね備えたものである。
露光装置30においては、上述のようにして検出位置情報取得手段52において取得された基準マーク12aの検出位置情報と、上述のようにしてずれ情報取得手段80において取得されたずれ情報とが、露光軌跡情報取得手段86に入力される。
そして、露光軌跡情報取得手段86は、入力された上記検出位置情報と上記ずれ情報とに基づいて、露光の際の各マイクロミラー38毎の基板12上における実際の露光軌跡(画像空間上における露光軌跡)を表わす露光軌跡情報を取得する。
具体的には、露光軌跡情報取得手段86において、上記第1の実施形態と同様に、走査方向に直交する方向について隣接する検出位置情報12d同士を結ぶ直線と各マイクロミラー38の通過位置情報12cを表わす直線との交点の座標値が求められ、その交点とその交点に上記直交する方向に隣接する各検出位置情報12dとの距離が求められ、上記隣接する検出位置情報12dのうちの一方の検出位置情報12dと交点との距離と、他方の検出位置情報12dと交点との距離との比が求められる。
一方、露光軌跡情報取得手段86は、上記第2の実施形態と同様に、入力されたずれ量と各マイクロミラー38毎の通過位置情報12cに基づいて、図23に曲線で示されるような、各マイクロミラー38毎の基板12上における仮露光軌跡情報を取得する。
そして、露光軌跡情報取得手段86は、上記のようにして求められた比と仮露光軌跡情報とを露光軌跡情報として交点配置情報算出手段88に出力する。
そして、交点配置情報算出手段88は、上記第1の実施形態と同様に、図25に示すように、走査方向に直交する方向に隣接する露光画像データ基準位置情報12eを結ぶ直線を、入力された比に基づいて分割した点を求めた後、その点を結ぶ直線を求め、その直線の走査方向に対する傾き分だけ仮露光軌跡情報を傾けて露光軌跡情報を表わす曲線M1’およびM2’を求め、その曲線を露光点データ軌跡として取得する。なお、図25におけるA1:B1、A2:B2は、露光軌跡情報取得手段86から入力された比がa1:b1、a2:b2である場合に、a1:b1=A1:B1、a2:b2=A2:B2を満たすような比である。
そして、上記と同様にして、各マイクロミラー38毎の露光点データ軌跡が求められる。
そして、交点配置情報算出手段88は、上記のようにして求められた露光点データ軌跡を、上記と同様に、中間ベクトルデータと同じ座標系にプロットし、中間ベクトルデータによって表わされるベクトルと露光点データ軌跡との交点の配置情報を求める。なお、交点配置情報の算出方法については上記と同様である。
そして、上記のようにして取得された交点配置情報のy座標の値が露光点データ取得手段89に出力され、露光点データ取得手段89において、入力された交点y座標に基づいて各マイクロミラー38毎の露光点データ列が取得される。露光点データ列の取得方法については上記と同様である。
そして、各マイクロミラー38毎について露光点データ列がそれぞれ取得され、その各マイクロミラー38毎の露光点データ列が露光ヘッド制御部59に出力される。
一方、上記のように各マイクロミラー38毎の露光点データ列が露光ヘッド制御部59に出力されるとともに、移動ステージ14が、図1に示す下流側の位置から上流側へ所望の速度で移動させられる。
そして、基板12の先端がカメラ26により検出されると露光が開始される。具体的には、露光ヘッド制御部59から各露光ヘッド30のDMD36に上記露光点データに基づいた制御信号が出力され、露光ヘッド30は入力された制御信号に基づいてDMD36のマイクロミラーをオン・オフさせて基板12を露光する。
次に、本発明の描画点データ取得方法および装置並びに描画方法および装置の第4の実施形態を用いた露光装置40について詳細に説明する。露光装置40の外観の概略構成については、図1に示す本発明の第1の実施形態を用いた露光装置10と同様である。
露光装置40は、図26に示すように、上記第1の実施形態を用いた露光装置10の構成に加えてさらに、基板12の移動の速度変動情報を予め取得する速度変動情報取得手段90を備えている。そして露光点データ取得手段91は、速度変動情報取得手段90により取得された速度変動情報に基づいて、移動ステージ14の移動の速度が遅いほどサンプリングピッチを短くする。なお、図26において図5と同じ符号を付している構成については、上記第1の実施形態を用いた露光装置10とその作用は同様である。また、上記基板12の移動の速度変動情報とは、本実施形態においては、移動ステージ14の移動機構60の制御精度に応じて発生する移動速度のムラである。
図27は、実際の露光の際の基板12上における所定のマイクロミラー38の露光軌跡とそのマイクロミラー38により露光点を露光するタイミングとを表わしたものである。なお、図27における点線矢印が、移動ステージの速度変動がない場合におけるマイクロミラー38の露光軌跡と露光タイミングとを表わしたものであり、実線矢印が、移動ステージの速度変動がある場合におけるマイクロミラー38の露光軌跡と露光タイミングを表わしたものである。そして、直線上において矢印を付した部分がマイクロミラー38による露光点の露光タイミングを示している。なお、図27においては、説明の都合上、2つの露光軌跡を別々の直線で示しているが、これらの露光軌跡は同一のマイクロミラーの露光軌跡である。そして、図27におけるP1〜P8は、基板12上に露光される画像を構成する各画素を示したものである。また、露光タイミングと移動ステージ14の移動速度とは、所望の解像度で基板12上に露光画像が露光されるように相対的な関係をもって予め設定されているものである。
図27に示すように、移動ステージ14の速度変動がない場合には、各画素P1〜P8は、マイクロミラー38によって1つの露光点により露光される。つまり、1つの画素に対して、マイクロミラー38が露光する露光点の数は1つである。
一方、移動ステージ14の速度変動がある場合には、各画素P1〜P8を露光する露光点の数は、その速度変動に応じて異なる。具体的には、1つの画素の幅を移動ステージ14が移動する間に露光タイミングが2回以上ある場合には、つまり相対的に遅い速度で移動ステージ14が移動して露光される領域は、各画素は2以上の露光点によって露光されることになる。そして、1つの画素の幅を移動ステージ14が移動する間に露光タイミングが全くない場合には、つまり相対的に速い速度で移動ステージ14が移動して露光される領域は、各画素は露光されない。
図27においては、画素P1,P5を露光する際には、移動ステージ14は相対的に遅い速度で移動し、画素P4,P8を露光する際には、移動ステージ14は相対的に早い速度で移動し、画素P2,P3,P6,P7を露光する際には、移動ステージ14は予め設定された一定の速度で移動している。
したがって、上記のような移動ステージの速度変動に応じて露光点データを取得する必要がある。
そこで、露光点データ取得手段91は速度変動情報取得手段90により取得された速度変動情報に応じた数の露光点データが取得されるように、サンプリングピッチを変化させる。速度変動情報とは、具体的には、たとえば、所定の露光タイミングピッチにおける移動ステージ14のステージ移動方向への移動距離の変動情報であり、速度変動情報取得手段90に予め設定される。
そして、上記のように速度変動情報取得手段90に予め設定された速度変動情報が、露光点データ取得手段91に出力され、露光点データ取得手段91は、たとえば、移動ステージ14の移動速度に変化がない場合には、サンプリングピッチを通常のサンプリングピッチ0.5として露光点データを取得し、移動ステージ14の移動速度に変化がある場合には、その速度変動に応じたサンプリングピッチで露光点データを取得する。たとえば、図27の実線矢印で示したような速度変動がある場合には、画素P1および画素P5を露光するための露光点データを取得する際には、サンプリングピッチを短くして3つの露光点データが取得されるようにする。また、画素P4および画素P8を露光するための露光点データを取得する際には、サンプリングピッチを長くして露光点データを取得しないようにする。そして、画素P2,P3,P6,P7を露光するための露光データを取得する際には、通常のサンプリングピッチとして1つの露光点データを取得するようにする。
そして、上記のようにして取得された露光点データが移動ステージ14の移動に応じて順次露光ヘッド制御部59に出力され、露光ヘッド制御部59から各露光ヘッド30のマイクロミラー38にその露光点データに応じた制御信号が出力され、その制御信号に応じてマイクロミラーがオン・オフされて基板12に露光点が露光される。
なお、上記第4の実施形態の露光装置40において、検出位置情報取得手段52により検出位置情報を取得し、その検出位置情報に基づいて露光軌跡情報取得手段54において露光軌跡情報を取得し、交点配置情報算出手段56において、上記露光軌跡情報に基づいて露光点データ軌跡を求めた後、その露光点データ軌跡と中間ベクトルデータによって表わされるベクトルとの交点を求め、その交点のy座標に2値化露光画像データを割り当てるまでの作用については、上記第1の実施形態の露光装置10と同様である。そして、上記のようにして割り当てられた2値化露光画像データからサンプリングして露光点データを取得する際に、上記のような方法を採用することができる。
また、上記第2、第3の実施形態の露光装置においても、上記と同様の方法を用いて露光点データを取得するようにすることができる。その場合においても露光点データ軌跡と中間ベクトルデータによって表わされるベクトルとの交点を求め、その交点のy座標に2値化露光画像データを割り当てるまでの作用については、上記第2、第3の実施形態の露光装置と同様である。
また、上記第2の実施形態の露光装置において、上記第4の実施形態の露光装置のように速度変動情報に応じて取得する露光点データの数を変化させるようにすれば、たとえば、移動ステージ14の蛇行を補正できるだけでなく、ヨーイングも考慮した補正を行うことができる。なお、ヨーイングとは、移動ステージ14の蛇行に、移動ステージ14の回転が加わったものである。上記のような移動ステージ14の回転により、各マイクロミラー38の基板12上の像の位置が変化するとともに、所定の露光タイミングピッチにおける移動ステージ14のステージ移動方向への移動距離が変化することになるので、つまり上記回転により移動ステージ14の局所的速度変動が生じるので、上記像の位置変動および速度変動情報に応じて露光点データの数を変化させるようにすればよい。なお、蛇行成分を0として回転成分のみを考慮してもよい。
また、上記第1〜第4の実施形態を全て用いた露光装置とすることもできる。そのように構成した場合における露光装置の作用について、図28および図29のフローチャートを用いて簡単に説明する。なお、詳細な作用については上記説明と同様である。
まず、露光軌跡情報取得手段54に各露光ヘッド30のDMD36の各マイクロミラー38の通過位置情報が入力設定され(S10)、移動ステージ14のずれ情報および速度変動情報がそれぞれずれ情報取得手段80、速度変動情報取得手段90に入力設定される(S12)。そして、データ作成装置40において作成されたベクトル形式の露光画像データが中間ベクトル生成手段50に入力され(S14)、中間ベクトル生成手段50において、上記露光画像データに基づいて中間ベクトルデータが生成され、その中間ベクトルデータは交点配置情報算出手段56に出力される(S16)。
一方、上記のように中間ベクトルデータが生成されるとともに、露光装置10全体の動作を制御するコントローラ70が移動機構60に制御信号を出力し、移動機構60はその制御信号に応じて移動ステージ14を図1に示す位置からガイド20に沿って一旦上流側の所定の初期位置まで移動させた後、ステージ移動方向へ所望の速度で移動させる(S18)。
そして、上記のようにして移動する移動ステージ14上の基板12に基準マーク12aがカメラ26によって撮影され、その撮影画像データに基づいて検出位置情報取得手段52によって検出位置情報が取得される(S20)
そして、上記のようにして取得された検出位置情報が、検出位置情報取得手段52から露光軌跡情報取得手段54に出力されるとともに、ずれ情報取得手段において設定されたずれ情報が露光軌跡情報取得手段54に出力される。そして、露光軌跡情報取得手段54において、基板12上における各マイクロミラー38の露光軌跡情報が算出されるが、具体的には、まず、第1の実施形態の露光装置において説明したように、走査方向に直交する方向について隣接する検出位置情報12dを結ぶ直線と各マイクロミラー38の通過位置情報12cを表わす直線との交点の座標値が求められ、上記交点とその交点に上記直交する方向に隣接する各検出位置情報12dとの距離が求められ、上記隣接する検出位置情報12dのうちの一方の検出位置情報12dと上記交点との距離と、他方の検出位置情報12dと上記交点との距離との比が求められる。具体的には、図9におけるa1:b1、a2:b2、a3:b3およびa4:b4が露光軌跡情報として求められる。なお、上記比は、上記のようにして取得された検出位置情報からずれ量を差し引いた後に求められる。(S20)。
また、露光軌跡情報取得手段54においては、上記のような比が算出されるとともに、入力されたずれ量と各マイクロミラー38の通過位置情報とに基づいて各マイクロミラー38毎の仮露光軌跡情報が求められ、この仮露光軌跡情報と上記比とが露光軌跡情報として取得され、交点配置情報算出手段56に出力される。なお、比と仮露光軌跡を求める順番は逆でもよい。そして、交点配置情報算出手段56においては、図25で説明したようにして露光軌跡情報に対応する露光点データ軌跡を表わす曲線が求められ(S24)、上記のようにして求められた露光点データ軌跡を、上記と同様に、中間ベクトルデータと同じ座標系にプロットし、中間ベクトルデータによって表わされるベクトルと露光点データ軌跡との交点の配置情報を求める(S26)。交点配置情報の算出方法については上記と同様である。
そして、上記のようにして取得された交点配置情報のy座標の値が露光点データ取得手段58に出力され、そのy座標の値に基づいて、上記のように2値化露光画像データが割り当てられる(S28)。
そして、露光点データ取得手段58には、速度変動情報取得手段90において取得された速度変動情報が入力され、上記第4の実施形態の露光装置において説明したように、上記速度変動情報に応じたサンプリングピッチが設定され、そのサンプリングピッチで2値化露光画像データがサンプリングされて各マイクロミラー38毎の露光点データ列が取得される(S30)。露光点データ列の取得方法については上記と同様である。
なお、このとき速度変動情報だけでなく、基板12の走査方向への伸縮も考慮して、つまり、基板12の検出位置情報12dで区切られた領域毎のマイクロミラー38の通過位置情報の長さも考慮してサンプリングピッチを決定することが望ましい。
そして、上記のようにして取得された各マイクロミラー38毎の露光点データの列に90度回転処理もしくは行列を用いた転置変換などが施され、図17に示すように、基板12に対する各露光ヘッド30の各位置に応じたフレームデータ1〜mが生成される(S32)。
一方、上記のようにフレームデータ1〜mが生成されるとともに、移動ステージ14が、図1に示す下流側の位置から上流側へ所望の速度で移動させられる。そして、基板12の先端がカメラ26により検出されると露光が開始され、上記フレームデータ1〜mが移動ステージ14の移動に応じて各露光ヘッド30にその位置に応じて順次出力され、各露光ヘッド30によりフレームデータに基づいた露光画像が基板12上に露光される(S34)。そして、全てのフレームデータが露光ヘッド30に入力され、露光が終了すると再び移動ステージ14は上流側に移動する(S36)。そして、次の基板12がある場合にはその基板12に交換された後、再びS16からの処理が行われ、次の基板12がない場合にはそのまま終了する(S34)。
上記第1〜第4の実施形態の露光装置によれば、露光画像を表わすベクトル形式の露光画像データを取得するとともに、露光画像の露光の際の基板12上におけるマイクロミラー38の露光軌跡の情報を取得し、露光画像データにより表わされる露光画像の輪郭と露光軌跡情報に対応する露光画像データ上における露光点データ軌跡との交点の配置を示す交点配置情報を取得し、交点配置情報に基づいて露光点データ軌跡に対応した露光点データを取得するようにしたので、従来のようにベクトル形式の露光画像データをラスター形式の露光画像データに変換することなくベクトル形式の露光画像データから直接露光点データを取得することができ、処理速度の低下およびコストアップを招くことなく、露光精度の向上を図ることができる。
図30に、上記第1〜第4の実施形態の露光装置の効果を視覚的に表わした模式図を示す。図30(A)はラスター形式の露光画像データを用いて露光した場合の露光画像を示す図であり、図30(B)はベクトル形式の露光画像データを用いて露光した場合の露光画像を示したものである。なお、図30(A),(B)における黒丸はマイクロミラーを示したものであり、点線矢印はマイクロミラーとそのマイクロミラーにより露光される露光画素との対応関係を示したものである。
また、上記第1の実施形態の露光装置のように、基板12上の所定位置に予め設けられた複数の基準マーク12aを検出してその基準マーク12aの位置を示す検出位置情報12dを取得し、その取得した検出位置情報12dに基づいて露光軌跡情報を取得するようにした場合には、たとえば、基板12に変形が生じたような場合でも、その変形後の基板12上におけるマイクロミラー38の露光軌跡の情報を予め取得し、その露光軌跡情報に対応した露光点データを露光画像データから取得することができるので、上記変形に応じた露光画像を基板12上に描画することができる。したがって、たとえば、多層プリント配線板を形成する際には、各層の配線パターンをその各層の変形に応じて形成することができるので各層の配線パターンの位置合わせを高精度に行うことができる。
また、上記第2および第3の実施形態の露光装置のように、予め設定された基板12の所定移動方向に対する露光画像の露光の際の基板12の実移動方向のずれ情報を取得し、その取得したずれ情報に基づいて露光軌跡情報を取得するようにした場合には、基板12の移動方向にずれが生じた場合においても、その移動方向のずれに応じた露光軌跡の情報を予め取得し、その露光軌跡情報に対応した露光点データを露光画像データから取得することができるので、上記移動方向のずれに影響されることなく基板12上の所望の位置に所望の露光画像を描画することができる。
また、上記第4の実施形態の露光装置のように、予め設定された基板12の所定移動速度に対する露光画像の露光の際の基板12の実移動速度の変動を示す速度変動情報を取得し、その取得した速度変動情報に基づいて、基板12の実移動速度が相対的に遅い基板12上の露光領域ほど描画点データの数が多くなるようにサンプリングピッチを変化させて露光点データを取得するようにした場合には、移動ステージ14の移動速度のムラに影響されることなく、基板12上の所望の位置に所望の露光画像を露光することができる。
また、上記第1〜第4の実施形態の露光装置においては、上記のようにベクトル形式の露光画像データ上に、基板12の変形などに応じて取得された露光点データ軌跡を対応させて露光点データを取得するようにしたが、検出位置情報に対応させて露光画像データを変形し、その変形した露光画像データと同様に変形した露光点データ軌跡とに基づいて露光点データを取得するようにしてもよい。なお、誤差の性質に応じて、画像データの変形で吸収するものと、露光点データ軌跡(ピッチ成分を含む)の変形で吸収するものとを分けるようにしてもよい。たとえば、基板の変形や設置位置の誤差は、画像データの変形で対応し、移動ステージの搬送誤差などは、露光点データ軌跡の変形で対応するようにしてもよい。この場合、移動ステージの搬送誤差などを考慮しなければ、露光点データ軌跡を不変とすることもできる。
また、上記第1〜第4の実施形態の露光装置においては、中間ベクトルデータを生成し、この中間ベクトルデータを利用して露光点データ軌跡と露光画像データにより表される露光画像の輪郭の交点を求めるようにしたが、必ずしも中間ベクトルデータは生成しなくても上記交点を求めることができる。たとえば、図31に示すように、ベクトル形式の露光画像データが、方向と長さを示す線分データD1と太さデータD2とからなるものである場合には、まず、図31に矢印で示す露光点データ軌跡と線分データD1との交点0を求め、下式(1)より角度θ1を求め、その角度θ1に基づいて下式(2)よりOPの長さを求め、そのOPの長さに基づいて下式(3)より交点Pの座標を求めることができる。また、交点Qの座標も、上記と同様に、θ1、θ2、θ3、QPおよびOxとOyに基づいて求めるようにすればよい。なお、図31におけるL1およびL2はx方向に平行な直線である。
θ1=θ3−θ2 ・・・ (1)
OP=(D2/2) × (1/sinθ1) ・・・(2)
Px=Ox + OP×cosθ3、Py=Oy + OP×sinθ3 ・・・ (3)
但し、Pxは交点Pのx座標、Pyは交点Pのy座標
Oxは点Oのx座標、Oyは点Oのy座標
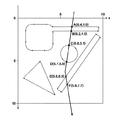
また、ベクトル形式の露光画像データから露光点データを取得する方法としては、上記第1〜第4の実施形態で説明した方法に限らず、その他の方法も考えることができる。たとえば、図32に示すように、基板12上における露光点P1の位置に対応する露光画像データD上の位置座標(x1,y1)を取得し、ベクトル形式の露光画像データDと上記位置座標(x1,y1)とに基づいて露光点の露光点データを取得することができる。具体的には、たとえば、ベクトル形式の露光画像データが、図33に示すように、方向と長さを示す線分データD1と太さデータD2とからなるものである場合には、露光点P1と線分D1との距離L3を求め、L3とD2/2との大きさを比較して露光点P1が露光画像データにより表される露光画像上にあるか否かを判定し、露光画像上にある場合には、そのベクトル形式の露光画像データにより示される値を露光点P1の露光点データとして取得するようにすればよい。なお、上記ベクトル形式の露光画像データにより示される値は2値に限らず、多値でもよい。一方、露光点P1が露光画像上にない場合には、露光点P1の露光点データとして0を取得するようにすればよい。
また、上記露光点P1の位置座標は、図34に示すように、基板12上の所定位置におけるマイクロミラー38の位置を示すものとすることができる。
また、図35に示すように、露光画像データDに基づいて決定される複数の露光画像と露光点P1の位置座標を含む線L4とを重ね合わせ、線L4が重なる露光画像の露光画像データに基づいて露光点データを取得するようにすることができる。
また、図36に示すように、上記線L4を、基板12上におけるマイクロミラー38の露光軌跡とすることができる。
また、図37に示すように、上記線L4を、基板12上の所定位置におけるDMD36の各マイクロミラー38を結ぶ直線とすることができる。この場合、まず、ベクトルの開始点の位置座標(たとえば、所定の1つのマイクロミラーの位置座標)を取得した後、この始点から延びる直線と露光画像データDの輪郭ベクトルとの交点を計算し、各交点間もしくはそれ以外の区間に含まれるマイクロミラーについて露光点データを算出する。直線の形状は、ビームスポットの配列に基づいて固定値として設定してもよいし、上述の露光軌跡の場合と同様に、基板の変形や移動ステージの搬送誤差などを考慮して変形したものとしてもよい。
また、図38に示すように、露光画像データに基づいて決定される複数の露光画像と露光点P1の位置座標を含む所定領域Aとを重ね合わせ、所定領域Aが重なる露光画像の露光画像データに基づいて露光点データを取得するようにすることができる。
また、図39に示すように、所定領域Aを、基板12上の所定位置におけるDMD36の領域とすることができる。たとえば、DMD36の像の全部または一部毎に、領域Aを設定するようにしてもよい。
また、図40(A),(B)に示すように、露光画像データD上における所定の矩形領域Sを設定し、その矩形領域S内について、DMD36の領域と露光画像との重なりを求め、その重なり部分の露光画像データに基づいて露光点P1の露光点データを取得するようにしてもよい。
また、上記実施形態では、空間光変調素子としてDMDを備えた露光装置について説明したが、このような反射型空間光変調素子の他に、透過型空間光変調素子を使用することもできる。
また、上記実施形態では、いわゆるフラッドベッドタイプの露光装置を例に挙げたが、感光材料が巻きつけられるドラムを有する、いわゆるアウタードラムタイプの露光装置としてもよい。
また、上記実施形態の露光対象である基板12は、プリント配線基板だけでなく、フラットパネルディスプレイの基板であってもよい。この場合、パターンは、カラーフィルター、ブラックマトリックス、TFTなどの半導体回路、その他の各種の構造体であってもよい。また、基板12の形状は、シート状のものであっても、長尺状のもの(フレキシブル基板など)であってもよい。
また、本発明における描画方法および装置は、インクジェット方式などのプリンタにおける描画にも適用することができる。たとえば、インクの吐出による描画点を、本発明と同様に形成することができる。つまり、本発明における描画点形成領域を、インクジェット方式のプリンタの各ノズルから吐出されたインクが付着する領域として考えることができる。
また、上記描画軌跡情報は、実際の基板上における描画点形成領域の描画軌跡を用いて描画軌跡情報としてもよいし、実際の基板上における描画点形成領域の描画軌跡を近似したものを描画軌跡情報としてもよいし、実際の基板上における描画点形成領域の描画軌跡を予測したものを描画軌跡情報としてもよい。
また、基板の変形やステージの移動誤差に応じて、画像データ上におけるビームの軌跡を折れ線や曲線等の非直線で規定するのと同様に、ピッチ成分も非直線的に規定することができる。
この場合、各ビーム軌跡に対応させて、ピッチ成分の情報を保持していることが好ましい。ただし、基板の位置ずれや傾きのみを考慮するような場合には、全てのビーム軌跡に共通のピッチ成分(この場合、ピッチ間隔も全て一定としてもよい)を割り当ててもよい。
つまり、基板の位置補正及び基板搬送方向と直交する方向の画像変形補正は、ビーム軌跡の変化で対応し、基板搬送方向に沿った方向の画像変形補正は、ピッチ成分の変化で対応することができる。この場合、ビーム軌跡ごとにピッチ成分を与えておくことによって、局所的又は変形量が連続的に変化するような変形補正にも対応することができる。
また、ピッチ成分は、ビーム軌跡ベクトルの向きに沿って設定してもよいし、ビーム軌跡ベクトルを所定の座標軸に投影したベクトルに沿って設定してもよい。
また、ピッチ成分に対応付けて、画像の輪郭とビーム軌跡との交点位置の情報を求めておく(例えば、交点位置をピッチ成分で与える)ことによって、ビーム軌跡に沿ったこの交点位置の情報の集まりを、圧縮データ的に扱うようにしてもよい。
また、上記実施形態においては、2つ以上のマイクロミラー(ビーム)毎に1つの露光点データ軌跡を取得するようにしてもよい。たとえば、マイクロレンズアレイを構成する1つのマイクロレンズによって集光される複数のビーム毎に露光点データ軌跡を求めることができる。
また、基板の変形等を画像データの変形で吸収する場合には、図41に示すように、輪郭ベクトルを変形させるようにしてもよい。この場合、たとえば、図5中の検出位置情報取得手段52から中間ベクトル生成手段50に、基準マーク12aの検出位置情報が供給される。
上記のように、本実施形態においては、ベクトル形式の画像データ上に規定した線(露光点データ軌跡)に基づいて、露光点データを求めることができるため、そのための計算を高速に行うことができる。ここで、線として上記露光軌跡情報に基づく露光軌跡ベクトルを用いた場合と、ビームスポット列に沿って規定したビーム列ベクトル(たとえば、図37の線L4)を用いた場合とにおける、計算量の違いについて説明する。露光軌跡ベクトルを用いた場合、交点計算の回数は、マイクロミラー数(たとえば、1024×240個)×対象となる露光画像データのベクトル数となるのに対して、ビーム列ベクトルを用いた場合は、ビーム列数(たとえば、240個)×対象となる露光画像データのベクトル数×フレーム数となる。この場合、フレーム数は、基板の長さ/露光ピッチで求められ、たとえば、1000000ほどの値となる。したがって、ビーム列ベクトルを用いた場合の方が計算量が多いことになる。一方、ビーム列ベクトルを用いた場合は、フレーム毎にデータを作成することができるため、リアルタイム性に優れている。つまり、ステージの振動などの非再現性の誤差原因にも対応可能である(図39の例のように、DMD36に対して所定領域Aを設ける場合も同様である)。