JP4825253B2 - 可変形オブジェクト認識のためのシステムおよび方法 - Google Patents
可変形オブジェクト認識のためのシステムおよび方法 Download PDFInfo
- Publication number
- JP4825253B2 JP4825253B2 JP2008258684A JP2008258684A JP4825253B2 JP 4825253 B2 JP4825253 B2 JP 4825253B2 JP 2008258684 A JP2008258684 A JP 2008258684A JP 2008258684 A JP2008258684 A JP 2008258684A JP 4825253 B2 JP4825253 B2 JP 4825253B2
- Authority
- JP
- Japan
- Prior art keywords
- model
- image
- level
- search
- local
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images









Classifications
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V10/00—Arrangements for image or video recognition or understanding
- G06V10/70—Arrangements for image or video recognition or understanding using pattern recognition or machine learning
- G06V10/74—Image or video pattern matching; Proximity measures in feature spaces
- G06V10/75—Organisation of the matching processes, e.g. simultaneous or sequential comparisons of image or video features; Coarse-fine approaches, e.g. multi-scale approaches; using context analysis; Selection of dictionaries
- G06V10/754—Organisation of the matching processes, e.g. simultaneous or sequential comparisons of image or video features; Coarse-fine approaches, e.g. multi-scale approaches; using context analysis; Selection of dictionaries involving a deformation of the sample pattern or of the reference pattern; Elastic matching
Landscapes
- Engineering & Computer Science (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Theoretical Computer Science (AREA)
- Medical Informatics (AREA)
- Health & Medical Sciences (AREA)
- Databases & Information Systems (AREA)
- Evolutionary Computation (AREA)
- General Health & Medical Sciences (AREA)
- Artificial Intelligence (AREA)
- Software Systems (AREA)
- Computing Systems (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Multimedia (AREA)
- Image Analysis (AREA)
- Length Measuring Devices By Optical Means (AREA)
- Image Processing (AREA)
- Measurement Of Velocity Or Position Using Acoustic Or Ultrasonic Waves (AREA)
Description

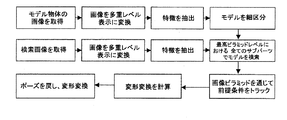
(a)モデルオブジェクトの画像を、電子メモリに取得する工程と、
(b)前記モデルオブジェクトの画像を、検索スペースの帰納的な細区分と一致し、少なくとも前記オブジェクトの画像を含む多重レベル表示に変換する工程と、
(c)前記検索スペースの離散化の各レベルについて、前記モデルオブジェクトの、少なくとも1つの事前に計算されたモデルを生成する工程であって、前記事前に計算されたモデルが、対応する方向ベクトルを有する複数のモデル点からなり、前記モデル点および前記方向ベクトルが、方向ベクトルを前記各モデル点に戻す画像処理操作によって生成する工程と、
(d)複数の部分中に、前記複数のモデル点の細区分を生成する工程であって、前記部分を変換することにより、前記モデルの変形されたインスタンスが表わされる工程と、
(e)検索画像を電子メモリに取得する工程と、
(f)前記検索画像を、前記検索スペースの帰納的な細区分と一致し、少なくとも前記検索画像を含む多重レベル表示に変換する工程と、
(g)少なくとも1つの事前に計算されたモデルが検索されるべき変換範囲に対応する、前記検索画像中のモデル点の部分集合に、方向ベクトルを戻す画像処理操作を、多重レベル表示の変換された各画像に対して行う工程と、
(h)局所的測量の結果を組み合わせて、グローバル一致測量値を計算する工程であり、前記局所的測量のために、前記事前に計算されたモデルに近い変換の制限された範囲内において、前記モデルの前記部分を検索し、各部分の極大適合度を、グローバル一致測量値に対する、前記部分の寄与として取得する工程と、
(i)一致測量値がユーザにより選択可能な閾値より大きく、局所的極大である、これらのモデルポーズを決定し、かつ、前記検索スペースの最も疎な離散化レベルにおける、少なくとも1つの事前に計算されたモデルのインスタンスのリストを、前記モデルポーズから作成する工程と、
(j)前記部分の局所的変位を表わす変形変換値を計算する工程と、
(k)前記検索スペースの前記最も疎な離散化レベルにおいて、前記検索スペースの帰納的な細区分を通じ、最も密な離散化レベルに至るまで、前記少なくとも1つの事前に計算されたモデルの前記インスタンスをトラックする工程と、
(l)各レベルにおいて、前記変形変換値をそれぞれ計算し、かつ、前記変形変換値を次のレベルに伝える工程と、
(m)前記モデルポーズ、および、前記最も密な離散化レベルにおける前記モデルオブジェクトのインスタンスの変更変換値を定める工程とを含むことを特徴とする方法を含む。
(a)モデルオブジェクトの画像を、電子メモリに取得する手段と、
(b)前記モデルオブジェクトの画像を、検索スペースの帰納的な細区分と一致し、少なくとも前記オブジェクトの画像を含む多重レベル表示に変換する手段と、
(c)前記検索スペースの離散化の各レベルについて、前記モデルオブジェクトの、少なくとも1つの事前に計算されたモデルを生成する手段であって、前記事前に計算されたモデルが、対応する方向ベクトルを有する複数のモデル点からなり、前記モデル点および前記方向ベクトルが、方向ベクトルを前記各モデル点に戻す画像処理操作によって生成する手段と、
(d)複数の部分中に、前記複数のモデル点の細区分を生成する手段であって、前記部分を変換することにより、前記モデルの変形されたインスタンスが表わされる手段と、
(e)検索画像を電子メモリに取得する手段と、
(f)前記検索画像を、前記検索スペースの帰納的な細区分と一致し、少なくとも前記検索画像を含む多重レベル表示に変換する手段と、
(g)少なくとも1つの事前に計算されたモデルが検索されるべき変換範囲に対応する、前記検索画像中のモデル点の部分集合に、方向ベクトルを戻す画像処理操作を、多重レベル表示の変換された各画像に対して行う手段と、
(h)局所的測量の結果を組み合わせて、グローバル一致測量値を計算する手段であり、前記局所的測量のために、前記事前に計算されたモデルに近い変換の制限された範囲内において、前記モデルの前記部分を検索し、各部分の極大適合度を、グローバル一致測量値に対する、前記部分の寄与として取得する手段と、
(i)一致測量値がユーザにより選択可能な閾値より大きく、局所的極大である、これらのモデルポーズを決定し、かつ、前記検索スペースの最も疎な離散化レベルにおける、少なくとも1つの事前に計算されたモデルのインスタンスのリストを、前記モデルポーズから作成する手段と、
(j)前記部分の局所的変位を表わす変形変換値を計算する手段と、
(k)前記検索スペースの前記最も疎な離散化レベルにおいて、前記検索スペースの帰納的な細区分を通じ、最も密な離散化レベルに至るまで、前記少なくとも1つの事前に計算されたモデルの前記インスタンスをトラックする手段と、
(l)各レベルにおいて、前記変形変換値をそれぞれ計算し、かつ、前記変形変換値を次のレベルに伝える手段と、
(m)前記モデルポーズ、および、前記最も密な離散化レベルにおける前記モデルオブジェクトのインスタンスの変更変換値を定める手段とを含むことを特徴とするシステムを含む。
、事前に定めることができる。
(a)モデルオブジェクトの画像を、電子メモリ(702)に取得する手段(701)と、
(b)前記モデルオブジェクトの画像を、検索スペースの帰納的な細区分と一致し、少なくとも前記オブジェクトの画像を含む多重レベル表示に変換する手段(703)と、
(c)前記検索スペースの離散化の各レベルについて、前記モデルオブジェクトの、少なくとも1つの事前に計算されたモデルを生成する手段であって、前記事前に計算されたモデルが、対応する方向ベクトルを有する複数のモデル点からなり、前記モデル点および前記方向ベクトルが、方向ベクトルを前記各モデル点に戻す画像処理操作によって生成する手段(704)と、
(d)複数の部分中に、前記複数のモデル点の細区分を生成する手段であって、前記部分を変換することにより、前記モデルの変形されたインスタンスが表わされる手段(705)と、
(e)検索画像を電子メモリに取得する手段(706)と、
(f)前記検索画像を、前記検索スペースの帰納的な細区分と一致し、少なくとも前記検索画像を含む多重レベル表示に変換する手段(707)と、
(g)少なくとも1つの事前に計算されたモデルが検索されるべき変換範囲に対応する、前記検索画像中のモデル点の部分集合に、方向ベクトルを戻す画像処理操作を、多重レベル表示の変換された各画像に対して行う手段(708)と、
(h)局所的測量の結果を組み合わせて、グローバル一致測量値を計算する手段であり、前記局所的測量のために、前記事前に計算されたモデルに近い変換の制限された範囲内において、前記モデルの前記部分を検索し、各部分の極大適合度を、グローバル一致測量値に対する、前記部分の寄与として取得する手段(709)と、
(i)一致測量値がユーザにより選択可能な閾値より大きく、局所的極大である、これらのモデルポーズを決定し、かつ、前記検索スペースの最も疎な離散化レベルにおける、少なくとも1つの事前に計算されたモデルのインスタンスのリストを、前記モデルポーズから作成する手段(710)と、
(j)前記部分の局所的変位を表わす変形変換値を計算する手段(711)と、
(k)前記検索スペースの前記最も疎な離散化レベルにおいて、前記検索スペースの帰納的な細区分を通じ、最も密な離散化レベルに至るまで、前記少なくとも1つの事前に計算されたモデルの前記インスタンスをトラックする手段(712)と、
(l)各レベルにおいて、前記変形変換値をそれぞれ計算し、かつ、前記変形変換値を次のレベルに伝える手段(713)と、
(m)前記モデルポーズ、および、前記最も密な離散化レベルにおける前記モデルオブジェクトのインスタンスの変更変換値を定める手段(714)と、
(n)検出領域を平坦化する手段(715)とを含む。
Claims (15)
- 一般的な非線形変形下にある画像中のオブジェクトを認識する方法であって、
(a)モデルオブジェクトの画像を、電子メモリに取得する工程と、
(b)前記モデルオブジェクトの画像を、検索スペースの帰納的な細区分と一致し、少なくとも前記オブジェクトの画像を含む多重レベル表示に変換する工程と、
(c)前記検索スペースの離散化の各レベルについて、前記モデルオブジェクトの、少なくとも1つの事前に計算されたモデルを生成する工程であって、前記事前に計算されたモデルが、対応する方向ベクトルを有する複数のモデル点からなり、前記モデル点および前記方向ベクトルが、前記各モデル点の方向ベクトルを返す画像処理操作によって生成される工程と、
(d)複数の部分中に、前記複数のモデル点の細区分を生成する工程であって、前記部分を変換することにより、前記モデルの変形されたインスタンスが表わされる工程と、
(e)検索画像を電子メモリに取得する工程と、
(f)前記検索画像を、前記検索スペースの帰納的な細区分と一致し、少なくとも前記検索画像を含む多重レベル表示に変換する工程と、
(g)少なくとも1つの事前に計算されたモデルが検索されるべき非線形変換範囲に対応する、前記検索画像中の画像点の部分集合の方向ベクトルを返す画像処理操作を、多重レベル表示の変換された各画像に対して行う工程と、
(h)局所的測量の結果を組み合わせて、前記検索スペースの最も疎な離散化レベルでの各アフィンモデルポーズの広域的一致測量値を計算する工程であり、前記局所的測量のために、前記事前に計算されたモデルに近い、局所的アフィン変換の限定された範囲内において、前記モデルの前記部分を検索し、各部分の極大適合度を、前記部分の広域的一致測量値への寄与として取得する工程と、
(i)一致測量値がユーザにより選択可能な閾値より大きく、局所的極大である、これらのモデルポーズを決定し、かつ、前記検索スペースの最も疎な離散化レベルにおける、少なくとも1つの事前に計算されたモデルのインスタンスのリストを、前記モデルポーズから作成する工程と、
(j)前記部分の局所的変位を表わす非線形変形変換を計算する工程と、
(k)前記検索スペースの前記最も疎な離散化レベルにおいて、前記検索スペースの帰納的な細区分を通じ、最も密な離散化レベルに至るまで、前記少なくとも1つの事前に計算されたモデルの前記インスタンスをトラックする工程と、
(l)各レベルにおいて、前記非線形変形変換をそれぞれ計算し、かつ、前記変形変換を次のレベルに伝える工程と、
(m)前記最も密な離散化レベルにおける前記モデルオブジェクトのインスタンスの非線形変形変換を定める工程とを含むことを特徴とする方法。 - 前記部分の位置を、前記最も密な離散化レベルよりも高い解像度で決定する、請求項1に記載の方法。
- 前提条件の最高のインスタンスの、前記ユーザにより選択可能な閾値から、ユーザにより選択可能な数の最大値までのみを、前記最も疎な離散化レベルにおいて可能な一致のリスト中に作成する、請求項2に記載の方法。
- 各部分の前記局所的一致測量値のスコアが、ユーザにより選択可能な局所的閾値より大きくなければならず、それ以外の場合には、前記部分が遮蔽され、さらなる処理が行われないものとされる、請求項3に記載の方法。
- 各部分が多数の点からなり、前記細区分が重複した点の集合を生成する、請求項4に記載の方法。
- 各部分が多数の点からなり、前記点の集合が分離した集合である、請求項4に記載の方法。
- K−meansクラスタリング法または正規化カットを用いて細区分を行う、請求項6に記載の方法。
- 前記計算された非線形変形変換が透視変換である、請求項4に記載の方法。
- 前記モデルの生成が、イメージングデバイスの内部構造および前記モデルに関する情報を、入力された測量値として追加的に取得し、前記計算された非線形変形変換が三次元ポーズである、請求項4に記載の方法。
- 前記計算された非線形変形変換が、薄板スプライン、円筒変換、または調和補間である、請求項4に記載の方法。
- 前記変換されたモデル部分の方向ベクトル、および、前記検索画像の方向ベクトルの、正規化された内積の合計が、前記局所的スコア測量に用いられる、請求項4に記載の方法。
- 前記変換されたモデル部分の方向ベクトル、および、前記検索画像の方向ベクトルの、正規化された内積の合計の絶対値が、前記局所的スコア測量において用いられる、請求項4に記載の方法。
- 前記変換されたモデル部分の方向ベクトル、および、前記検索画像の方向ベクトルの、正規化された内積の絶対値の合計が、前記局所的スコア測量において用いられる、請求項4に記載の方法。
- 一般的な非線形変形下にある画像中のオブジェクトを認識するシステムであって、
(a)モデルオブジェクトの画像を、電子メモリに取得する手段と、
(b)前記モデルオブジェクトの画像を、検索スペースの帰納的な細区分と一致し、少なくとも前記オブジェクトの画像を含む多重レベル表示に変換する手段と、
(c)前記検索スペースの離散化の各レベルについて、前記モデルオブジェクトの、少なくとも1つの事前に計算されたモデルを生成する手段であって、前記事前に計算されたモデルが、対応する方向ベクトルを有する複数のモデル点からなり、前記モデル点および前記方向ベクトルが、前記各モデル点の方向ベクトルを返す画像処理操作によって生成する手段と、
(d)複数の部分中に、前記複数のモデル点の細区分を生成する手段であって、前記部分を変換することにより、前記モデルの変形されたインスタンスが表わされる手段と、
(e)検索画像を電子メモリに取得する手段と、
(f)前記検索画像を、前記検索スペースの帰納的な細区分と一致し、少なくとも前記検索画像を含む多重レベル表示に変換する手段と、
(g)少なくとも1つの事前に計算されたモデルが検索されるべき非線形変換範囲に対応する、前記検索画像中の画像点の部分集合の方向ベクトルを返す画像処理操作を、多重レベル表示の変換された各画像に対して行う手段と、
(h)局所的測量の結果を組み合わせて、前記検索スペースの最も疎な離散化レベルでの各アフィンモデルポーズの広域的一致測量値を計算する手段であり、前記局所的測量のために、前記事前に計算されたモデルに近い、局所的アフィン変換の限定された範囲内において、前記モデルの前記部分を検索し、各部分の極大適合度を、前記部分の広域的一致測量値への寄与として取得する手段と、
(i)一致測量値がユーザにより選択可能な閾値より大きく、局所的極大である、これらのモデルポーズを決定し、かつ、前記検索スペースの最も疎な離散化レベルにおける、
少なくとも1つの事前に計算されたモデルのインスタンスのリストを、前記モデルポーズから作成する手段と、
(j)前記部分の局所的変位を表わす非線形変形変換を計算する手段と、
(k)前記検索スペースの前記最も疎な離散化レベルにおいて、前記検索スペースの帰納的な細区分を通じ、最も密な離散化レベルに至るまで、前記少なくとも1つの事前に計算されたモデルの前記インスタンスをトラックする手段と、
(l)各レベルにおいて、前記非線形変形変換をそれぞれ計算し、かつ、前記変形変換を次のレベルに伝える手段と、
(m)前記モデルポーズ、および、前記最も密な離散化レベルにおける前記モデルオブジェクトのインスタンスの非線形変形変換を定める手段とを含むことを特徴とするシステム。 - 請求項1〜13のいずれか一項に記載の方法をコンピュータに実行させる、コンピュータプログラム。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP08150403A EP2081133B1 (en) | 2008-01-18 | 2008-01-18 | System and method for deformable object recognition |
| EP08150403.7 | 2008-01-18 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2009169934A JP2009169934A (ja) | 2009-07-30 |
| JP2009169934A5 JP2009169934A5 (ja) | 2011-09-22 |
| JP4825253B2 true JP4825253B2 (ja) | 2011-11-30 |
Family
ID=39591564
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008258684A Active JP4825253B2 (ja) | 2008-01-18 | 2008-10-03 | 可変形オブジェクト認識のためのシステムおよび方法 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US8260059B2 (ja) |
| EP (1) | EP2081133B1 (ja) |
| JP (1) | JP4825253B2 (ja) |
| CN (1) | CN101488187B (ja) |
| AT (1) | ATE468572T1 (ja) |
| DE (1) | DE602008001305D1 (ja) |
Families Citing this family (41)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7016539B1 (en) | 1998-07-13 | 2006-03-21 | Cognex Corporation | Method for fast, robust, multi-dimensional pattern recognition |
| US8081820B2 (en) | 2003-07-22 | 2011-12-20 | Cognex Technology And Investment Corporation | Method for partitioning a pattern into optimized sub-patterns |
| CN101739666B (zh) * | 2009-12-15 | 2011-12-21 | 西南交通大学 | 基于一维快速哈特莱变换和匹配追踪的图像稀疏分解快速方法 |
| US8872911B1 (en) * | 2010-01-05 | 2014-10-28 | Cognex Corporation | Line scan calibration method and apparatus |
| US8189961B2 (en) * | 2010-06-09 | 2012-05-29 | Microsoft Corporation | Techniques in optical character recognition |
| KR101395094B1 (ko) * | 2010-09-29 | 2014-05-16 | 안동대학교 산학협력단 | 개체 검출 방법 및 시스템 |
| US8463073B2 (en) * | 2010-11-29 | 2013-06-11 | Microsoft Corporation | Robust recovery of transform invariant low-rank textures |
| JP2012133759A (ja) * | 2010-11-29 | 2012-07-12 | Canon Inc | 侵入物体の検知を行うことができる物体追尾装置、物体追尾方法及び記憶媒体 |
| US9124873B2 (en) | 2010-12-08 | 2015-09-01 | Cognex Corporation | System and method for finding correspondence between cameras in a three-dimensional vision system |
| US8600192B2 (en) * | 2010-12-08 | 2013-12-03 | Cognex Corporation | System and method for finding correspondence between cameras in a three-dimensional vision system |
| EP2497424A1 (en) * | 2011-03-07 | 2012-09-12 | Agfa Healthcare | Radiographic imaging method and apparatus. |
| US10365711B2 (en) | 2012-05-17 | 2019-07-30 | The University Of North Carolina At Chapel Hill | Methods, systems, and computer readable media for unified scene acquisition and pose tracking in a wearable display |
| KR101747220B1 (ko) | 2012-08-30 | 2017-06-15 | 한화테크윈 주식회사 | 이미지 피라미드의 적응적 이미지 처리 장치 및 방법 |
| CN103034844B (zh) * | 2012-12-10 | 2016-04-27 | 广东图图搜网络科技有限公司 | 图像识别方法与装置 |
| US9679224B2 (en) | 2013-06-28 | 2017-06-13 | Cognex Corporation | Semi-supervised method for training multiple pattern recognition and registration tool models |
| CN103336963B (zh) * | 2013-07-08 | 2016-06-08 | 天脉聚源(北京)传媒科技有限公司 | 一种图像特征提取的方法及装置 |
| US9569850B2 (en) | 2013-10-16 | 2017-02-14 | Cognex Corporation | System and method for automatically determining pose of a shape |
| US9785828B2 (en) | 2014-06-06 | 2017-10-10 | Honda Motor Co., Ltd. | System and method for partially occluded object detection |
| DE102014010982B4 (de) | 2014-07-29 | 2024-11-14 | Sew-Eurodrive Gmbh & Co Kg | Verfahren zur Erkennung eines Objekts in einem Bild und Vorrichtung zur Durchführung des Verfahrens |
| US9754178B2 (en) * | 2014-08-27 | 2017-09-05 | International Business Machines Corporation | Long-term static object detection |
| US11049476B2 (en) | 2014-11-04 | 2021-06-29 | The University Of North Carolina At Chapel Hill | Minimal-latency tracking and display for matching real and virtual worlds in head-worn displays |
| US10192283B2 (en) * | 2014-12-22 | 2019-01-29 | Cognex Corporation | System and method for determining clutter in an acquired image |
| US10452949B2 (en) | 2015-11-12 | 2019-10-22 | Cognex Corporation | System and method for scoring clutter for use in 3D point cloud matching in a vision system |
| CN106845508B (zh) | 2015-12-07 | 2019-05-17 | 腾讯科技(深圳)有限公司 | 一种检测图像中信息卡的方法、装置和系统 |
| JP6648925B2 (ja) * | 2015-12-17 | 2020-02-14 | キヤノン株式会社 | 画像処理方法、画像処理装置、画像処理システム、生産装置、プログラム及び記録媒体 |
| CN105913069B (zh) * | 2016-04-27 | 2019-05-31 | 南京维睛视空信息科技有限公司 | 一种图像识别方法 |
| JP6791991B2 (ja) * | 2017-01-19 | 2020-11-25 | 株式会社ソニー・インタラクティブエンタテインメント | 画像配信装置 |
| EP3404583A1 (en) | 2017-05-19 | 2018-11-21 | MVTec Software GmbH | System and method for model adaptation |
| US11562505B2 (en) | 2018-03-25 | 2023-01-24 | Cognex Corporation | System and method for representing and displaying color accuracy in pattern matching by a vision system |
| US10410372B1 (en) * | 2018-06-14 | 2019-09-10 | The University Of North Carolina At Chapel Hill | Methods, systems, and computer-readable media for utilizing radial distortion to estimate a pose configuration |
| AU2019336263A1 (en) * | 2018-09-04 | 2021-04-08 | Fastbrick Ip Pty Ltd | Vision system for a robotic machine |
| CN109584216A (zh) * | 2018-11-12 | 2019-04-05 | 上海交通大学 | 面向机器人抓取作业的可变形料袋视觉识别与定位方法 |
| CN109766802A (zh) * | 2018-12-28 | 2019-05-17 | 东莞中国科学院云计算产业技术创新与育成中心 | 柔性物体识别方法、装置、计算机设备和存储介质 |
| CN110427948A (zh) * | 2019-07-29 | 2019-11-08 | 杭州云深弘视智能科技有限公司 | 字符样本的生成方法及其系统 |
| KR102871418B1 (ko) * | 2019-09-26 | 2025-10-15 | 삼성전자주식회사 | 자세 추정 방법 및 장치 |
| US11308634B2 (en) | 2020-02-05 | 2022-04-19 | Datalogic Ip Tech S.R.L. | Unsupervised anchor handling for machine vision system |
| CN112231196B (zh) * | 2020-12-14 | 2021-03-16 | 平安科技(深圳)有限公司 | App埋点行为分类方法、装置、计算机设备及存储介质 |
| US11941863B2 (en) * | 2021-08-04 | 2024-03-26 | Datalogic Ip Tech S.R.L. | Imaging system and method using a multi-layer model approach to provide robust object detection |
| CN113870227B (zh) * | 2021-09-29 | 2022-12-23 | 赛诺威盛科技(北京)股份有限公司 | 基于压力分布的医学定位方法、装置、电子设备及存储介质 |
| CN115359467A (zh) * | 2022-07-27 | 2022-11-18 | 河海大学 | 一种针对可变形医学靶标的识别方法及装置 |
| EP4636707A1 (en) * | 2024-04-17 | 2025-10-22 | MVTec Software GmbH | Methods and systems and automatic example-based parameter estimation in machine vision |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6005978A (en) * | 1996-02-07 | 1999-12-21 | Cognex Corporation | Robust search for image features across image sequences exhibiting non-uniform changes in brightness |
| US6411734B1 (en) * | 1998-04-03 | 2002-06-25 | Cognex Corporation | Object image search using validated sub-model poses |
| US6324299B1 (en) * | 1998-04-03 | 2001-11-27 | Cognex Corporation | Object image search using sub-models |
| US6574353B1 (en) * | 2000-02-08 | 2003-06-03 | University Of Washington | Video object tracking using a hierarchy of deformable templates |
| EP1193642B1 (en) | 2000-09-27 | 2005-03-30 | MVTec Software GmbH | System and method for object recognition |
| JP3776340B2 (ja) | 2000-09-27 | 2006-05-17 | エムヴイテック・ソフトウェア・ゲーエムベーハー | 対象物認識システム及び方法 |
| US6993177B1 (en) * | 2001-11-02 | 2006-01-31 | Cognex Technology And Investment Corporation | Gauging based on global alignment and sub-models |
| EP1394727B1 (en) * | 2002-08-30 | 2011-10-12 | MVTec Software GmbH | Hierarchical component based object recognition |
| US7190834B2 (en) * | 2003-07-22 | 2007-03-13 | Cognex Technology And Investment Corporation | Methods for finding and characterizing a deformed pattern in an image |
-
2008
- 2008-01-18 DE DE602008001305T patent/DE602008001305D1/de active Active
- 2008-01-18 AT AT08150403T patent/ATE468572T1/de not_active IP Right Cessation
- 2008-01-18 EP EP08150403A patent/EP2081133B1/en active Active
- 2008-03-31 CN CN2008100904091A patent/CN101488187B/zh active Active
- 2008-05-05 US US12/115,059 patent/US8260059B2/en active Active
- 2008-10-03 JP JP2008258684A patent/JP4825253B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| CN101488187B (zh) | 2013-05-08 |
| ATE468572T1 (de) | 2010-06-15 |
| US20090185715A1 (en) | 2009-07-23 |
| CN101488187A (zh) | 2009-07-22 |
| EP2081133A1 (en) | 2009-07-22 |
| EP2081133B1 (en) | 2010-05-19 |
| JP2009169934A (ja) | 2009-07-30 |
| US8260059B2 (en) | 2012-09-04 |
| DE602008001305D1 (de) | 2010-07-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4825253B2 (ja) | 可変形オブジェクト認識のためのシステムおよび方法 | |
| CN109934847B (zh) | 弱纹理三维物体姿态估计的方法和装置 | |
| CN109903313B (zh) | 一种基于目标三维模型的实时位姿跟踪方法 | |
| Sharp et al. | ICP registration using invariant features | |
| CN108052942B (zh) | 一种飞机飞行姿态的视觉图像识别方法 | |
| JP6348093B2 (ja) | 入力データから検出対象物の像を検出する画像処理装置および方法 | |
| JP6011102B2 (ja) | 物体姿勢推定方法 | |
| JP5671281B2 (ja) | 位置姿勢計測装置、位置姿勢計測装置の制御方法及びプログラム | |
| Tran et al. | Non-contact gap and flush measurement using monocular structured multi-line light vision for vehicle assembly | |
| JP6899189B2 (ja) | ビジョンシステムで画像内のプローブを効率的に採点するためのシステム及び方法 | |
| CN119445005B (zh) | 一种基于视觉的点云图像融合方法 | |
| JP6612822B2 (ja) | モデルを修正するためのシステムおよび方法 | |
| JP5976089B2 (ja) | 位置姿勢計測装置、位置姿勢計測方法、およびプログラム | |
| Li et al. | Model-based temporal object verification using video | |
| JP4003465B2 (ja) | 特定パターン認識方法、特定パターン認識プログラム、特定パターン認識プログラム記録媒体および特定パターン認識装置 | |
| Hofhauser et al. | Edge-based template matching and tracking for perspectively distorted planar objects | |
| Ulrich et al. | Empirical performance evaluation of object recognition methods | |
| JP4525526B2 (ja) | パターンマッチング方法及び装置 | |
| Hofhauser et al. | Perspective planar shape matching | |
| CN118762208B (zh) | 一种基于图像特征点匹配的螺栓松动识别方法及系统 | |
| CN121245866B (zh) | 面向人形机器人抓取的稀疏视角三维高斯语言场构建方法和系统 | |
| JP2001109894A (ja) | 画像情報認識装置および画像情報認識方法および画像情報認識プログラムを記憶した媒体 | |
| Li et al. | Moving Target Detection Based on Improved Background Global Compensation Differential Method | |
| CN121169831A (zh) | 基于移动设备图像获取的焊接轨迹生成方法及系统 | |
| CN120125658A (zh) | 应用于已知环境的定位方法、装置及存储介质 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110708 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110708 |
|
| A871 | Explanation of circumstances concerning accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A871 Effective date: 20110708 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110808 |
|
| TRDD | Decision of grant or rejection written | ||
| A975 | Report on accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A971005 Effective date: 20110818 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20110823 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20110909 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4825253 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140916 Year of fee payment: 3 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |