JP4849178B2 - 移動型ロボット - Google Patents
移動型ロボット Download PDFInfo
- Publication number
- JP4849178B2 JP4849178B2 JP2010057267A JP2010057267A JP4849178B2 JP 4849178 B2 JP4849178 B2 JP 4849178B2 JP 2010057267 A JP2010057267 A JP 2010057267A JP 2010057267 A JP2010057267 A JP 2010057267A JP 4849178 B2 JP4849178 B2 JP 4849178B2
- Authority
- JP
- Japan
- Prior art keywords
- trunk
- image
- robot
- camera
- connection site
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images
















Landscapes
- Manipulator (AREA)
Description
接続部位の背後に未知環境が存在すると、体幹の移動経路を計画することができなくなってしまう。あるいは、アームや脚などの接続部位の移動経路を計画することができなくなってしまう。特に、接続部位を目的位置に移動させる経路を計画する場合には、目的位置が未知環境にあるために、目的位置が認識できない事態が発生しやすい。例えば、異な る位置に配置されている2以上の体幹側カメラを利用して2以上の体幹側画像情報を得る ことができれば、両画像に撮像されている物体の奥行き情報が未知であっても、その物体 の移動型ロボットに対する相対的位置関係を計算することができる。しかしながら、接続 部位の影になっているために、いずれかの体幹側画像では撮像されていない周囲物体につ いては、位置を特定することができない。
しかしながら、上記の処理には本来的には必要とされない動作を要するばかりでなく、体幹を連続的に移動させるロボットや、周囲物体が移動する環境にある場合には、対応することが難しい。
本発明のロボットは、体幹と、駆動機構を有する関節部を介して体幹に接続されている接続部位と、体幹に設けられている2以上の体幹側カメラと、接続部位に設けられている接続部位側カメラと、2以上の体幹側カメラで撮像した2以上の体幹側画像から撮像範囲内に存在する物体の移動型ロボットに対する相対的位置関係を計算する第1計算手段と、体幹側カメラの少なくとも1つで撮像した体幹側画像と接続部位側カメラで撮像した接続部位側画像から撮像範囲内に存在する物体の移動型ロボットに対する相対的位置関係を計算する第2計算手段を備えている。第2計算手段は、接続部位を撮像している範囲が最も 少ない体幹側画像を選択して計算に用いる。本発明のロボットは、画像情報を処理することによって位置情報を計算する。合成画像を作成する必要は必ずしもない。
上記のロボットは、その後の体幹または接続部位の移動経路を計算することができる。 未知環境を残さないようにするために無駄な動作が必要とされることがない。また周囲物 体が移動する環境にあっても、移動経路を時々刻々に決定することができる。
(特徴1) ロボットは、体幹に走行機構(この実施例の場合は車輪であるが、脚リンクでもよい)を備えている。
(特徴2) ロボットは、環境地図から体幹の走行軌跡を計算する。
(特徴3) ロボットは、環境地図から接続部位の移動軌跡を計算する。
(特徴4) ロボットは、環境地図から体幹の走行軌跡と接続部位の移動軌跡を計算する。
(特徴5) ロボットは、関節角度制御装置や車輪回転数制御装置および位置情報検出装置により、ロボットの姿勢と各カメラの撮像方向を制御している。体幹側カメラの撮像方向は、体幹側カメラ撮像方向計算装置で計算され、接続部位側カメラの撮像方向は、接続部位側カメラ撮像方向計算装置で計算される。
(特徴6) ロボットは合成画像から得られた情報に基づき、移動経路を作成する。その経路に基づいて、前記関節角度制御装置や車輪回転数制御装置および位置情報検出装置がアクチュエータを制御し、体幹および/または接続部位を作成された移動経路に沿って移動させる。
(特徴7) ロボットは周囲環境の変化に対応して過去に作成した軌道に修正を加え、移動経路を変更する経路修正装置を備えている。
接続部位104は、肩関節203と、肘関節204と、手首関節205を備えており、掌に側カメラ106が固定されている。肩関節203と、肘関節204と、手首関節205は能動機構を有しており、接続部位側カメラ106は、肩関節203と、肘関節204と、手首関節205によって、胴体200に対する撮像方向を変えることができる。また胴体200に対する接続部位側カメラ106のカメラ位置を変えることもできる。
このロボットは、作業環境内における頭部201の位置を計測する手段を備えており、体幹側カメラ105のカメラ位置と撮像方向を認識している。また、体幹103に対する接続部位側カメラ106のカメラ位置と撮像方向を認識している。
本実施例のロボット100は、車輪206を利用してスイッチパネル10に接近し、接続部位104を利用してスイッチパネル10の壁面に配置されているスイッチ群12a,12b・・を操作する。スイッチパネル10の壁面の位置は既知である。
ロボットは、位置と撮像方位が既知のカメラで撮影した画像情報から周囲の環境を認識して移動経路を作成する移動経路作成手段113を有しており、作成した移動経路に従って移動した後にカメラ位置と撮像方向を再計算し、その後に再度撮像する処理を繰り返しながら、自律的に移動する。
それぞれのカメラの倍率や画像サイズなどの差異に関する情報は、体幹側カメラ位置撮像方向計算装置111および接続部位側カメラ位置撮像方向計算装置109によって把握されており、合成時にはその情報に基づいた画像処理を行うため、それぞれの画像の撮像範囲が完全に一致しなくてもよい。例えば、体幹側カメラ105に対し接続部位側カメラ106はスイッチパネル10までの距離が異なっており、かつ接続部位104が頭部201に対して傾斜していることから、図5の接続部位側画像は図4の体幹側画像に比べて撮像されるスイッチパネル10の倍率が大きく、また傾いている。
ステップS601では、合成画像作成装置110に体幹側画像情報が入力される。ステップS603では、体幹側画像において未知環境となっている部分の特徴点Xnの抽出をする。図7に、ステップS603において抽出される体幹側画像の特徴点の一例を示す。ロボット100の接続部位104の形状は既知であることから、体幹側画像から接続部位を撮像している範囲(接続部位の撮像範囲)を特定することができる(第1特定手段)。図中の点X1からX6は、接続部位の撮像範囲を包含するように抽出された特徴点である。本実施例では、直線で結ぶことが可能な6個の特徴点を抽出しているが、接続部位の輪郭に沿って特徴点Xnをとればよい。ステップS605では、ステップS603において抽出された特徴点から、接続部位の撮像範囲R(背後の周囲物体情報が未知の範囲)を特定する。図7の特徴点X1からX6に囲まれた範囲が、近似的な接続部位の撮像範囲Rである。抽出する特徴点Xnの数を増やすことで、特徴点によって取り囲まれる範囲Rを接続部位の撮像範囲に正確に一致させることができる。
ステップS609では、ステップS607で入力された接続部位側画像情報から、体幹側画像の接続部位の撮像範囲Rの特徴点に対応する点Znを抽出する。図8に、ステップS609において抽出される接続部位側画像の特徴点Znの一例を示す。図8中の点Z1からZ6は、体幹側画像から抽出された特徴点X1からX6に対応する点である。
ステップS611では、ステップS609で抽出された特徴点Znから、接続部位側画像の対応範囲S(体幹側画像では未知情報である範囲)を特定する(第2特定手段)。
ステップS615では、体幹側画像の接続部位の撮像範囲Rを、合成のための準備処理を終えた対応範囲Sに置き換える。その結果、ステップS617において、未知範囲のない合成画像が出力される。図9に、合成画像の一例を示す。破線で示されている接続部位の撮像範囲Rは対応範囲Sに置き換えられ、接続部位が撮像されていない合成画像を得ることができる。
図11に、上記の3台の体幹側カメラと連動して作動する接続部位側カメラが撮像した接続部位側画像ACを例示する。体幹側画像TC1、TC2およびTC3の接続部位の撮像範囲R1、R2およびR3を補うため、接続部位側画像ACはステップS607からステップS611の処理によって対応範囲S1、S2およびS3を特定する。
ステップS613からステップS617の処理により、体幹側画像TC1、TC2およびTC3の接続部位の撮像範囲R1、R2およびR3は、接続部位側画像ACの対応範囲S1、S2およびS3により置き換えられ、未知範囲のない体幹側カメラ画像が作成される。
図12は、ステレオカメラを用いたロボットの外観を示す図である。本実施例のロボット100は、体幹103と、肩関節203を介して体幹103に接続された一本の接続部位(アーム)104を有している。接続部位104は、2本以上が存在していてもよい。体幹103は、
胴体200と、首関節202と、頭部201を備えており、頭部201に体幹側カメラ105(a)および105(b)が固定されている。体幹側カメラ105(a)および105(b)は、首関節202によって、胴体200に対する撮像方向を変えることができる。胴体200の下方には1対の車輪206が配置されており、車輪206を利用して移動する。
接続部位104は、肩関節203と、肘関節204と、手首関節205を備えており、掌に接続部位側カメラ106が固定されている。肩関節203と、肘関節204と、手首関節205は能動機構を有しており、接続部位側カメラ106は、肩関節203と、肘関節204と、手首関節205によって、胴体200に対する撮像方向を変えることができる。また胴体200に対する接続部位側カメラ106のカメラ位置を変えることもできる。
このロボットは、作業環境内におえる頭部201の位置を計測する手段を備えており、体幹側カメラ105(a)および105(b)のカメラ位置と撮像方向を認識している。また、胴体200に対する接続部位側カメラ106のカメラ位置と撮像方向を認識している。
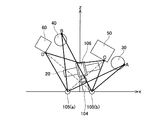
本実施例のロボット100は、周囲物体30,40,50,60を視覚により認識し、それらに衝突しない接続部位軌道を作成し、把持物20を空いたスペースに設置する。ロボット100の体幹側カメラ105(a)および105(b)は通常、ステレオカメラとして機能していて、図中の点A、B、C、Dは、ロボット100の視点である。
ロボット100は、位置と撮像方位が既知のカメラで撮像した画像情報から周囲の環境を認識して移動経路を計算し、計算した移動経路に従って移動した後にカメラ位置と撮像方向を再計算し、その後に再度撮像するという処理を繰返しながら、自律的に移動する。
具体的には、図14の例において、点Aおよび点Bは、実線矢印で示すように体幹側カメラ105(a)および105(b)の両方より撮像可能であるため、体幹側画像からステレオ画像が生成可能となっており、ロボットの移動に合わせてその情報を時系列上連続して取得することができる。
それに対し、点Cおよび点Dに関しては、体幹側カメラだけでは下肢の移動位置もしくは接続部位の動作によって、それぞれの点の体幹側カメラ105(a)および105(b)を利用したステレオ視が不可能となり、その周囲についての環境情報を取得することができない。破線矢印は、接続部位あるいは把持物体が視線を遮るため、同じ特徴点を有する画像を撮像することができないことを示している。
ステレオカメラの場合、特に周囲物体の奥行きや高さなどの情報を必要とする場合は、複数の位置情報が既知のカメラを利用するか、あるいは1台のカメラが移動しながら撮像した場合のように、複数の画像から視差情報が得られることが必須となる。このため、点Cおよび点Dは両眼視ができないことから、点Cおよび点D付近の物体の位置関係を認識することができない。
具体的には、点Aおよび点Bの周辺など、接続部位104などの視野を遮る物体がない場合には体幹側カメラ105(a)および105(b)によりステレオ画像を取得し、周囲物体のロボット100に対する相対的な位置関係を計算することができる(第1計算手段)。その一方で、点Cのような場合には体幹側カメラ105(b)と接続部位側カメラ106により両眼視し、点Dの場合には体幹側カメラ105(a)と接続部位側カメラ106により両眼視をすることにより、周辺環境全域を認識するのに必要な情報を得、周囲物体のロボット100に対する相対的な位置関係を計算することができる(第2計算手段)。
ステップS500では、体幹側カメラ105(a)と105(b)および接続部位側カメラ106により撮像された複数の画像が画像情報処理装置116へ入力され、ステレオ画像が取得される。画像情報処理装置116は、体幹側画像の未知範囲の大きさにより、接続部位側画像を利用するかどうかを判断してもよく、接続部位104によって遮られ、未知範囲となる範囲がより少ない画像の組み合わせからステレオ画像を得る手段を有している。
このとき、体幹側画像どうしからステレオ画像情報を得る場合と、体幹側画像と接続部位側画像を利用してステレオ画像を得る場合とで、それぞれに第1計算手段および第2計算手段という、異なる計算手段を用意することが望ましい。体幹側カメラどうしは並行であるが、体幹側画像と接続部位側画像を利用した計算手段は、それぞれのカメラの相対位置が異なるため、例えばステレオ画像の平行化やハンド・アイ校正のような座標系の変換などが適用できる。
また、適宜周辺環境のデータを更新することで、接続部位の動作と周囲の環境の変化を同時に、連続して認識し、それに応じて軌道を修正することができる。
例えば、アームだけでなく、脚などの複数の接続部位にそれぞれ、あるいは1本の接続部位の異なる部位に接続部位側カメラを回転可能に複数個装備すれば、撮像可能な範囲がより拡大される。
また、実施例2では体幹側カメラを主眼としたステレオ視について例示したが、複数の接続部位側カメラを用いてステレオ視を可能にし、体幹側カメラと接続部位側カメラそれぞれのステレオ画像処理装置を装備することで、さらに多様な用途に利用することができる。
本明細書または図面に説明した技術要素は、単独であるいは各種の組み合わせによって技術的有用性を発揮するものであり、出願時の請求項に記載の組み合わせに限定されるものではない。また、本明細書または図面に例示した技術は複数目的を同時に達成するものであり、そのうちの一つの目的を達成すること自体で技術的有用性を持つものである。
101:ロボット機構
103:体幹
104:接続部位(アーム)
105:体幹側カメラ
105(a):体幹側カメラ
105(b):体幹側カメラ
106:接続部位側カメラ
109:接続部位側カメラ位置撮像方向計算装置
110:合成画像作成装置
111:体幹側カメラ位置撮像方向計算装置
112:環境地図記憶装置
113:移動経路作成装置
114:制御装置
115:アクチュエータ群
116:画像処理装置
117:関節角検出装置
119:車輪回転数検出装置
121:位置情報検出装置
125:移動経路修正装置
200:胴体
201:頭部
202:首関節
203:肩関節
204:肘関節
205:手首関節
206:車輪
Claims (1)
- 体幹と、
駆動機構を有する関節部を介して体幹に接続されている接続部位と、
体幹に設けられている2以上の体幹側カメラと、
接続部位に設けられている接続部位側カメラと、
2以上の体幹側カメラで撮像した2以上の体幹側画像から、撮像範囲内に存在する物体の移動型ロボットに対する相対的な位置関係を計算する第1計算手段と、
体幹側カメラの少なくとも1つで撮像した体幹側画像と接続部位側カメラで撮像した接続部位側画像から、撮像範囲内に存在する物体の移動型ロボットに対する相対的な位置関係を計算する第2計算手段と、を備え、
前記第2計算手段は、接続部位を撮像している範囲が最も少ない体幹側画像を選択して計算に用いることを特徴とする移動型ロボット。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010057267A JP4849178B2 (ja) | 2010-03-15 | 2010-03-15 | 移動型ロボット |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010057267A JP4849178B2 (ja) | 2010-03-15 | 2010-03-15 | 移動型ロボット |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2006041323A Division JP4506685B2 (ja) | 2006-02-17 | 2006-02-17 | 移動型ロボット |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010131751A JP2010131751A (ja) | 2010-06-17 |
| JP4849178B2 true JP4849178B2 (ja) | 2012-01-11 |
Family
ID=42343592
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010057267A Expired - Fee Related JP4849178B2 (ja) | 2010-03-15 | 2010-03-15 | 移動型ロボット |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4849178B2 (ja) |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5561037B2 (ja) * | 2010-09-02 | 2014-07-30 | トヨタ自動車株式会社 | ロボット及びその制御方法 |
| WO2014102995A1 (ja) * | 2012-12-28 | 2014-07-03 | 株式会社日立製作所 | モニタリングシステム、方法およびプログラムを記憶した情報記録媒体 |
| JP2014151377A (ja) * | 2013-02-06 | 2014-08-25 | Seiko Epson Corp | ロボット制御方法、ロボット制御装置、ロボットシステム、ロボット及びプログラム |
| CA3092565C (en) | 2018-03-29 | 2021-07-20 | Mitsubishi Electric Corporation | Image processing device, image processing method, and monitoring system |
| JP6816070B2 (ja) * | 2018-08-24 | 2021-01-20 | ファナック株式会社 | 干渉回避装置およびロボットシステム |
| JP7028151B2 (ja) | 2018-12-14 | 2022-03-02 | トヨタ自動車株式会社 | 軌道生成装置 |
| EP4653153A1 (en) * | 2023-01-17 | 2025-11-26 | SoftBank Group Corp. | Robot hand, robot control system, function restoration processing system, robot control program, and function restoration processing program |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS57194895A (en) * | 1981-05-21 | 1982-11-30 | Tokyo Shibaura Electric Co | Monitoring device for manipulator |
| JPS6017509A (ja) * | 1983-07-11 | 1985-01-29 | Furukawa Electric Co Ltd:The | 配電工事用活線ロボツトのア−ム位置決め方法 |
| JP2960733B2 (ja) * | 1989-07-27 | 1999-10-12 | 株式会社日立製作所 | 画像表示方法及び画像表示装置並びに遠隔操作装置 |
| JPH05126521A (ja) * | 1991-11-08 | 1993-05-21 | Toshiba Corp | 遠隔操作マニピユレータ用位置測定装置 |
| JPH10230484A (ja) * | 1997-02-24 | 1998-09-02 | Nec Corp | 加工処理作業ロボット |
| JP2003080488A (ja) * | 2001-09-05 | 2003-03-18 | National Institute Of Advanced Industrial & Technology | 遠隔操作の監視装置 |
| JP3994950B2 (ja) * | 2003-09-19 | 2007-10-24 | ソニー株式会社 | 環境認識装置及び方法、経路計画装置及び方法、並びにロボット装置 |
-
2010
- 2010-03-15 JP JP2010057267A patent/JP4849178B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2010131751A (ja) | 2010-06-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4506685B2 (ja) | 移動型ロボット | |
| JP4849178B2 (ja) | 移動型ロボット | |
| US12466075B2 (en) | Autonomous and teleoperated sensor pointing on a mobile robot | |
| JP6855492B2 (ja) | ロボットシステム、ロボットシステム制御装置、およびロボットシステム制御方法 | |
| JP6180087B2 (ja) | 情報処理装置及び情報処理方法 | |
| EP2682711B1 (en) | Apparatus and method for three-dimensional measurement and robot system comprising said apparatus | |
| CN101479082B (zh) | 机器人装置和机器人装置的控制方法 | |
| JP6816070B2 (ja) | 干渉回避装置およびロボットシステム | |
| JP2011175477A (ja) | 3次元計測装置、処理方法及びプログラム | |
| JP4665857B2 (ja) | アームを誘導可能な移動体およびアームを誘導する方法 | |
| JP2014053018A (ja) | 情報処理装置、情報処理装置の制御方法及びプログラム | |
| JP2015135333A (ja) | 情報処理装置、情報処理装置の制御方法、およびプログラム | |
| JP2006224291A (ja) | ロボットシステム | |
| JP2686685B2 (ja) | ロボットによる物体操作のための能動的カメラ探索装置 | |
| JP7093881B1 (ja) | システム、及び自動搬送車 | |
| JP7448884B2 (ja) | 計測システム、計測装置、計測方法、及び計測プログラム | |
| JP2012022600A (ja) | マスク画像作成システム | |
| KR102923256B1 (ko) | 전자 장치, 이를 이용한 스테레오 영상 복원 방법 및 컴퓨터로 읽을 수 있는 기록 매체 | |
| US20260065497A1 (en) | Distance-based image combination | |
| WO2024048491A1 (ja) | ロボットシステム、および、ロボットシステムの制御方法 | |
| Heyer et al. | Camera Calibration for Reliable Object Manipulation in Care-Providing Robot FRIEND | |
| Shin et al. | Visual guidance system for remote-operation | |
| Seo et al. | Object-Based Visual Servoing for Autonomous Mobile Manipulators | |
| Mendiburu et al. | Obstacle avoidance for a robot manipulator based on visual feedback | |
| Mezouar | Optimal Camera Trajectory under visibility constraint in visual servoing: a variational approach |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20100315 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100315 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20110920 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20110922 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20111003 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20141028 Year of fee payment: 3 |
|
| LAPS | Cancellation because of no payment of annual fees |