JP4850366B2 - 荷重表示制御方法 - Google Patents
荷重表示制御方法 Download PDFInfo
- Publication number
- JP4850366B2 JP4850366B2 JP2001265951A JP2001265951A JP4850366B2 JP 4850366 B2 JP4850366 B2 JP 4850366B2 JP 2001265951 A JP2001265951 A JP 2001265951A JP 2001265951 A JP2001265951 A JP 2001265951A JP 4850366 B2 JP4850366 B2 JP 4850366B2
- Authority
- JP
- Japan
- Prior art keywords
- load
- stroke
- pressing portion
- waveform
- data
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 238000000034 method Methods 0.000 title claims description 4
- 238000003825 pressing Methods 0.000 claims description 35
- 238000003780 insertion Methods 0.000 claims description 15
- 230000037431 insertion Effects 0.000 claims description 15
- 238000010586 diagram Methods 0.000 description 4
- 238000004519 manufacturing process Methods 0.000 description 3
- 238000007796 conventional method Methods 0.000 description 1
Images

Landscapes
- Forging (AREA)
- Presses And Accessory Devices Thereof (AREA)
Description
【発明の属する技術分野】
本発明はプレスで挿入部品を被挿入部品に挿入してかしめる場合に、プレスの荷重とストロークの波形を表示装置に表示する際に、この波形を一定の位置に表示するようにした波形表示制御技術に関する。
【0002】
【従来の技術】
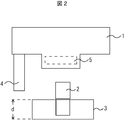
従来、プレスをもちいて、挿入部品を被挿入部品に挿入してかしめる場合、図2に示すようにしてかしめが行われる。
図2はプレスと部品の概略側面図であり、1は油圧シリンダ(図示せず)によって上下方向に移動可能な押圧部であり、図の状態から、下方に移動され、押圧部1で挿入部品2を押圧し、固定板(図示せず)に載置された被挿入部品3に挿入され、部品2は被挿入部品3にかしめられる。プレスの押圧部にはストロークセンサ4及び荷重センサ5が設けられている。ストロークセンサ4はプレスの押圧部1のストローク、即ち移動距離を測定するセンサで、ストロークの長さを電気信号に変換して出力する。荷重センサ5は荷重の大きさを電気信号に変換して出力する。これらストロークセンサ4及び荷重センサ5からの電気信号は波形表示装置の入力端子(図示せず)に入力される。
【0003】
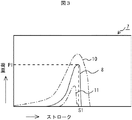
図3は波形表示装置の表示部の正面図である。ストロークセンサ4及び荷重センサ5からの電気信号によって、波形表示装置の表示部7には横軸にストロークを、縦軸に荷重を取った荷重の波形8が表示される。かしめが良好に行われたか否かを検査するために、波形表示装置の表示部7には、曲線10、11が表示されており、波形8が曲線10、11で囲まれた領域以内に入る場合にはかしめが正しく行われたと推定することができる。また、波形8が曲線10、11で囲まれた範囲に入らない場合にはかしめは正しく行われていないと判断できる。したがって、このようにして、かしめが正しく行われたか否かを判断していた。
【0004】
【発明が解決しようとする課題】
従来の技術では、ストロークセンサ4の移動開始点を基準として荷重を表示しているため、最大荷重が印加される位置、即ち、終了荷重到達点の位置が一定にならず、表示装置を用いてかしめの良否を判断するには、かしめを行う毎に、終了荷重到達点の位置を調節しなければならなかった。
これについて、図4を用いて説明する。図4は波形表示装置の表示部に表示されるストロークと荷重の波形を示す波形図である。
図2に示すかしめ部品のうち、挿入部品2の長さLはあまり製造誤差を持たないが、被挿入部品3の厚さdは製造誤差などによって変化する。今、被挿入部品3の基準の厚さをdとし、より厚い場合をd1、薄い場合をd2とする。被挿入部品3の厚さがdの場合、終了荷重(最大荷重)P1に到達点のストローク位置をS1とすると、被挿入部品3の厚さがd1の場合にはストローク位置S1に達する前に終了荷重P1に達するので、図4(a)に示す波形8aのようになる。被挿入部品3の厚さがd1の場合にはストローク位置S1よりもストロークが大きくなった位置で終了荷重P1に達するので、図4(b)に示す波形8bになる。また、被挿入部品の厚さがdの場合は、終了荷重(最大荷重)P1に到達点のストローク位置はS1となり、この場合は、図4に示すように、波形8cとなる。波形8cの場合には位置の制御をすることなく、図4に示すように曲線10と曲線11の領域の間に波形8aが入るか否かによって、かしめの良否を判定することができるが、図4(a)、(b)に示す波形8a、8bの場合には終了荷重P1のストロークがP1の位置にくるように波形の位置を調整しないと、かしめの良否を判定することができない。
【0005】
本発明の目的は終了荷重の位置が略同じストローク位置になるように制御して荷重を波形表示する技術を提供することにある。
【0006】
【課題を解決するための手段】
上記目的を達成するために、本発明では、押圧部で挿入部品を押圧して被挿入部品に挿入するプレスから得られた前記押圧部のストロークデータと該ストロークデータに対応する前記押圧部の荷重データから、前記押圧部により前記挿入部品に荷重がかかり始める時の前記押圧部のストローク位置を基準に、前記押圧部のストロークに対する荷重の波形を表示することにより、前記押圧部が前記挿入部品の挿入方向の長さ分移動して前記挿入部品が前記被挿入部品に完全に挿入されて最大荷重が印加される位置を表示部の略予め定められた位置になるように荷重の波形を表示するようにした。
【0007】
また、上記目的を達成するために、本発明では、押圧部で挿入部品を押圧して被挿入部品に挿入するプレスから得られた前記押圧部のストロークデータと該ストロークデータに対応する前記押圧部の荷重データとをメモリに記憶し、該メモリに記憶した前記押圧部のストロークデータと該ストロークデータに対応する前記押圧部の荷重データとから前記押圧部により前記挿入部品に荷重がかかり始める時の前記押圧部のストローク位置をゼロとした場合の最大荷重が印加される位置までのストロークを求め、前記ゼロの位置から前記最大荷重が印加される位置までを含むストロークと荷重との関係を示すグラフ表示することにより、前記最大荷重が印加される位置を表示部の略予め定められた位置になるように荷重の波形を表示するようにした。
【0008】
【発明の実施の形態】
以下、本発明の実施の形態について、実施例を用い、図を参照して説明する。
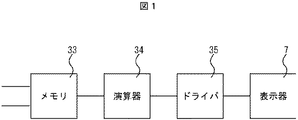
図1は本発明による荷重表示制御装置の一実施例を示す概略の構成図である。図において、端子31、32にはそれぞれストロークセンサからのストローク位置を示す信号、荷重を示す信号がメモリ33に供給される。メモリ33に記憶されたストロークデータと荷重データは演算器34で演算される。
【0009】
今、荷重がかかり始めた時のストローク位置をS2、終了荷重(最大荷重)が供給されたときのストローク位置をS1とする。挿入部品2と被挿入部品3が接触し(図1参照)、挿入部品2が被挿入部品3に挿入され始めると、プレスの荷重センサ5は荷重を検出する。更にプレスの押圧部1が被挿入部品3の方向に移動するに従って、荷重センサ5は少しずつ大きくなる荷重を検出し、挿入部品2が被挿入部品3に完全に挿入された時、即ち、挿入部品2の長さLに相当する分だけ押圧部1が移動した時に終了荷重(最大荷重)P1に達し、その後、荷重は急速に0になる。この場合、負荷がかかり始める時のストロークの位置S2を表示部7の横軸のゼロの位置に配置し、横軸の終了荷重P1が供給されたときのストローク位置S1をS1−S2の位置になるようにすると、前述したように、位置S2〜S1までの距離、即ち長さS2−S1は略挿入部品の長さLに等しく、挿入部品の長さLは製造誤差をあまりもたないので、S2からS1までの距離、即ちストロークは略一定となる。このため、終了荷重が表示される位置は表示部7の予め定められた位置になるので、波形8の位置を制御する必要はない。従って、演算器34では、S2,S1からS2をゼロとした場合のS1のストロークを求め、各荷重を求められた荷重に対応させる演算を行わせる。このようにして得られたストローク及び荷重のデータで表示装置のドライバ35を駆動して表示部7で表示させることによって、終了荷重を常に表示部の略予め定められた位置になるように、例えば常に図4(c)の位置になるように、荷重の波形を表示部7に表示することができる。
【0010】
【発明の効果】
以上述べたように、本発明によれば、終了荷重の位置を略同じ位置になるように荷重の波形を表示することができる。
【図面の簡単な説明】
【図1】本発明による荷重表示制御装置の一実施例を示す概略の構成図である。
【図2】プレスと部品の概略側面図である。
【図3】波形表示装置の表示部の正面図である。
【図4】波形表示装置の表示部に表示されるストロークと荷重の波形を示す波形図である。
【符号の説明】
1…押圧部、2…挿入部品、3…被挿入部品、4…ストロークセンサ、5…荷重センサ、7…波形表示装置の表示部、8、8a、8b、8c…波形、10…曲線、11…曲線。
Claims (2)
- 押圧部で挿入部品を押圧して被挿入部品に挿入するプレスから得られた前記押圧部のストロークデータと該ストロークデータに対応する前記押圧部の荷重データから、前記押圧部により前記挿入部品に荷重がかかり始める時の前記押圧部のストローク位置を基準に前記押圧部のストロークに対する荷重の波形を表示することにより、前記押圧部が前記挿入部品の挿入方向の長さ分移動して前記挿入部品が前記被挿入部品に完全に挿入されて最大荷重が印加される位置を表示部の略予め定められた位置になるように荷重の波形を表示することを特徴とする荷重表示制御方法。
- 押圧部で挿入部品を押圧して被挿入部品に挿入するプレスから得られた前記押圧部のストロークデータと該ストロークデータに対応する前記押圧部の荷重データとをメモリに記憶し、該メモリに記憶した前記押圧部のストロークデータと該ストロークデータに対応する前記押圧部の荷重データとから前記押圧部により前記挿入部品に荷重がかかり始める時の前記押圧部のストローク位置をゼロとした場合の最大荷重が印加される位置までのストロークを求め、前記ゼロの位置から前記最大荷重が印加される位置までを含むストロークと荷重との関係を示すグラフを表示することにより、前記最大荷重が印加される位置を表示部の略予め定められた位置になるように荷重の波形を表示することを特徴とする荷重表示制御方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2001265951A JP4850366B2 (ja) | 2001-09-03 | 2001-09-03 | 荷重表示制御方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2001265951A JP4850366B2 (ja) | 2001-09-03 | 2001-09-03 | 荷重表示制御方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2003071541A JP2003071541A (ja) | 2003-03-11 |
| JP4850366B2 true JP4850366B2 (ja) | 2012-01-11 |
Family
ID=19092340
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2001265951A Expired - Fee Related JP4850366B2 (ja) | 2001-09-03 | 2001-09-03 | 荷重表示制御方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4850366B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2024030757A (ja) * | 2022-08-25 | 2024-03-07 | 株式会社栗本鐵工所 | 測定波形表示装置およびプログラム |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6277146A (ja) * | 1985-09-28 | 1987-04-09 | Mazda Motor Corp | かしめ判定方法 |
| JPH04184230A (ja) * | 1990-11-20 | 1992-07-01 | Atsugi Unisia Corp | 圧入荷重検出装置 |
| JP2519610B2 (ja) * | 1991-03-25 | 1996-07-31 | 東京部品工業株式会社 | 電動プレス方法 |
-
2001
- 2001-09-03 JP JP2001265951A patent/JP4850366B2/ja not_active Expired - Fee Related
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2024030757A (ja) * | 2022-08-25 | 2024-03-07 | 株式会社栗本鐵工所 | 測定波形表示装置およびプログラム |
| JP7746237B2 (ja) | 2022-08-25 | 2025-09-30 | 株式会社栗本鐵工所 | 測定波形表示装置およびプログラム |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2003071541A (ja) | 2003-03-11 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP3233428B2 (ja) | 端子圧着装置 | |
| JP2000199779A (ja) | テストハンドの制御方法、記録媒体及び計測制御システム | |
| JP4031214B2 (ja) | 端子圧着状態判別方法 | |
| CN105361872A (zh) | 血压计袖带捆绑检测方法及装置 | |
| EP1286157A3 (en) | Vibration analysis of sheet material | |
| JPH1050449A (ja) | 端子圧着装置 | |
| JP4850366B2 (ja) | 荷重表示制御方法 | |
| EP1701146A1 (en) | Zero point correction circuit of load meter | |
| EP1376792A3 (en) | Method and apparatus for making spark plug | |
| JPH0529056A (ja) | 端子圧着自動調整装置 | |
| JP5205174B2 (ja) | 端子圧着状態良否判別装置、端子圧着加工装置 | |
| JPH10270898A (ja) | コネクタ圧入装置 | |
| JP2005131777A (ja) | 圧入かしめ装置 | |
| JP3705019B2 (ja) | 計測装置 | |
| JP2005297133A (ja) | 締付け工具およびボルト軸力の測定方法 | |
| CN211060824U (zh) | 一种柔性温度及应变传感器 | |
| JP4234654B2 (ja) | 接続不良端子の検出方法 | |
| CN223402454U (zh) | 一种压力触控按键及其一种电子设备 | |
| CN102365162B (zh) | 压接压力机 | |
| JP5300804B2 (ja) | 圧入方法 | |
| CN216955100U (zh) | 一种汽车触摸方向盘开关振动反馈测试装置 | |
| CN213210450U (zh) | 一种电力仪表检测装置 | |
| JPH1130558A (ja) | ベルト張力測定器 | |
| JP2000162061A (ja) | ワイヤーハーネス製造の圧接機と圧接の適否判定方法 | |
| JP2001159514A (ja) | 圧接端子の拡開量の測定と良否判定 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20080827 |
|
| RD02 | Notification of acceptance of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7422 Effective date: 20080827 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20101216 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110118 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20110927 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20111019 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20141028 Year of fee payment: 3 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| S533 | Written request for registration of change of name |
Free format text: JAPANESE INTERMEDIATE CODE: R313533 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| LAPS | Cancellation because of no payment of annual fees |