JP4905936B2 - 誘導機制御装置 - Google Patents
誘導機制御装置 Download PDFInfo
- Publication number
- JP4905936B2 JP4905936B2 JP2006216318A JP2006216318A JP4905936B2 JP 4905936 B2 JP4905936 B2 JP 4905936B2 JP 2006216318 A JP2006216318 A JP 2006216318A JP 2006216318 A JP2006216318 A JP 2006216318A JP 4905936 B2 JP4905936 B2 JP 4905936B2
- Authority
- JP
- Japan
- Prior art keywords
- magnetic flux
- induction machine
- induction
- φvol
- command
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images



Landscapes
- Control Of Multiple Motors (AREA)
Description
図2において、誘導機は4台しか示されていないが、複数台であれば、何台であっても良い。以下、誘導機は4台であるとして説明する。
電圧系磁束演算器5は、総和電流iと電力変換器3に入力される電圧指令vから、誘導機磁束φを式(1)で演算する。

ωm=(ωm1+ωm2+ωm3+ωm4)/4 式(6)
ここで、ωm1は誘導機101の速度、ωm2は誘導機102の速度、ωm3は誘導機103の速度、ωm4は誘導機104の速度である。
電力変換器3は、電圧指令vを増幅し、負荷である誘導機101〜104に電力を供給する。
車両において一括制御している一部車輪軸が空転し、例えば誘導機103の速度ωm3がωm1とωm2とωm4に比べて大きくなった場合、式(6)によれば、ωm1、ωm2、ωm3、ωm4に対する誘導機速度ωmの演算誤差が発生する。誘導機103の空転が大きく、誘導機速度ωmの演算誤差が大きくなれば、誘導機103が脱調状態となる。さらに、誘導機103の空転が大きくなれば、誘導機103だけでなく、誘導機101や誘導機102や誘導機104も脱調状態となる。
本発明は、以上の問題点を解決するためになされたものである。
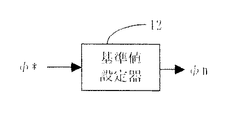
請求項5においては、磁束指令φ*を入力とする基準値設定器12により磁束基準値φnを作成する。請求項6においては、磁束基準値φnを、磁束指令φ*と減衰率βとの積とする。
一部車輪軸の空転、滑走の度合いにより、検知するまでの時間を変える事ができる。
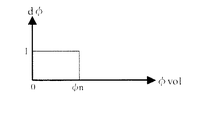
・dφは無次元の単位となるようにする。
・φvol=φnにてdφ=0とする。
・φvol<φnではdφ≧0とする。特に、φvol=0ではdφ>0とする。
dφ=(φn−φvol)/[(1−α)・φn] 式(8)
演算ゲインαの値により、誘導機磁束大きさφvolに対する誤差率dφのレベルが異なってくる。演算ゲインαは1未満の値とする。特に、α=0の場合、式(9)となり、φvol=0にてdφ=1となる。
dφ=(φn−φvol)/φn 式(9)
誤差率dφは積分器9に入力される。
2 電流検出器
3 電力変換器
4 トルク制御手段
5 磁束演算器
6 速度演算器
7 磁束量演算器
8 磁束誤差演算器
9 積分器
10 比較器
11 運転論理器
12 基準値設定器
i 総和電流
v 電圧指令
τ* トルク指令
φ* 磁束指令
ωm 誘導機速度
φ 誘導機磁束
N 運転指令
Φvol 誘導機磁束大きさ
Φn 磁束基準値
α 演算ゲイン
β 減衰率
dφ 誤差率
Tφ 誤差時間
Tn 時間設定値
K 検知信号
NN 制御指令
Claims (6)
- 複数台誘導機を持ち、全誘導機の総和電流と電圧から誘導機磁束を演算する磁束演算器と、該誘導機磁束と該総和電流から誘導機速度を演算する速度演算器を有し、前記総和電流と前記誘導機速度と磁束指令とトルク指令と運転指令を基に該複数台誘導機のトルクを一括制御するトルク制御手段を有する誘導機制御装置において、
該誘導機磁束から誘導機磁束大きさを演算する磁束量演算器と、前記誘導機磁束大きさと磁束基準値を入力し誤差率を出力する磁束誤差演算器と、該誤差率を積分し誤差時間を出力する積分器と、時間設定値と該誤差時間を比較し検知信号を出力する比較器と、該運転指令と該検知信号から制御指令を作成する運転論理器を新たに追加し、前記運転指令の代わりに該制御指令を該トルク制御手段に入力することを特徴とする誘導機制御装置。 - 前記磁束誤差演算器において、
前記誘導機磁束大きさφvolと前記磁束基準値φnを比較して、φvol>φnで前記誤差率を0、φvol<φnで前記誤差率を1とすることを特徴とする請求項1記載の誘導機制御装置。 - 前記磁束誤差演算器において、
前記誘導機磁束大きさφvolと前記磁束基準値φnから前記誤差率dφを
dφ=(φn−φvol)/φn
で演算することを特徴とする請求項1記載の誘導機制御装置。 - 前記磁束誤差演算器において、
前記誘導機磁束大きさφvolと前記磁束基準値φnと演算ゲインαから前記誤差率dφを
dφ=(φn−φvol)/[(1−α)・φn]
で演算することを特徴とする請求項1記載の誘導機制御装置。 - 前記磁束指令φ*を入力とする基準値設定器により前記磁束基準値φnを作成することを特徴とする請求1記載の誘導機制御装置。
- 前記磁束基準値φnを、前記磁束指令φ*と減衰率βとの積とすることを特徴とする請求1記載の誘導機制御装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006216318A JP4905936B2 (ja) | 2006-08-09 | 2006-08-09 | 誘導機制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006216318A JP4905936B2 (ja) | 2006-08-09 | 2006-08-09 | 誘導機制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2008043112A JP2008043112A (ja) | 2008-02-21 |
| JP4905936B2 true JP4905936B2 (ja) | 2012-03-28 |
Family
ID=39177509
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2006216318A Active JP4905936B2 (ja) | 2006-08-09 | 2006-08-09 | 誘導機制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4905936B2 (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7690427B2 (ja) * | 2022-05-10 | 2025-06-10 | 東洋電機製造株式会社 | 制御装置 |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3508971B2 (ja) * | 1996-09-30 | 2004-03-22 | 東洋電機製造株式会社 | 誘導電動機のトルク制御装置 |
| JPH118990A (ja) * | 1997-06-16 | 1999-01-12 | Nippon Soken Inc | 誘導モータのセンサレス制御装置 |
| JP3732784B2 (ja) * | 2002-01-22 | 2006-01-11 | 財団法人鉄道総合技術研究所 | 電気車の駆動制御方法および制御装置 |
| JP3974832B2 (ja) * | 2002-08-20 | 2007-09-12 | 財団法人鉄道総合技術研究所 | 加速度推定装置、電動機制御装置及び加速度推定方法 |
| JP4731133B2 (ja) * | 2004-06-29 | 2011-07-20 | 東洋電機製造株式会社 | 誘導機制御装置 |
-
2006
- 2006-08-09 JP JP2006216318A patent/JP4905936B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2008043112A (ja) | 2008-02-21 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5440889B2 (ja) | 電動パワーステアリング装置 | |
| JP6483039B2 (ja) | 電力変換装置 | |
| EP2749477A2 (en) | Electric power steering system | |
| CN107921949B (zh) | 电动制动装置 | |
| JP4177387B2 (ja) | モータ制御装置 | |
| WO2016121113A1 (ja) | インバータ装置 | |
| JP4948183B2 (ja) | 誘導機制御装置 | |
| JP4905936B2 (ja) | 誘導機制御装置 | |
| JP4999474B2 (ja) | 誘導機制御装置 | |
| JP6459229B2 (ja) | 電動パワーステアリング装置 | |
| TW201622337A (zh) | 馬達控制裝置 | |
| JP5921031B2 (ja) | 誘導機制御装置 | |
| JP2008043111A (ja) | 誘導機制御装置 | |
| CN107078679B (zh) | 电力转换装置和电力转换装置的控制方法 | |
| JP6057876B2 (ja) | 電力変換装置 | |
| JP2018029435A (ja) | 電気車制御装置 | |
| JP6304401B2 (ja) | 電動機の制御装置及び制御方法 | |
| JP2010124554A (ja) | 誘導機制御装置 | |
| JP2010263745A (ja) | 誘導機制御装置 | |
| JP5921030B2 (ja) | 誘導機制御装置 | |
| CN111987974B (zh) | 旋转电机控制装置 | |
| JP6264333B2 (ja) | モータ駆動装置 | |
| JP2019036582A (ja) | ソレノイド駆動装置および自動変速機の変速制御装置 | |
| JP4731133B2 (ja) | 誘導機制御装置 | |
| EP2808993B1 (en) | Motor controller and construction machine provided therewith |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20090513 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20111222 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20120105 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20120105 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20150120 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4905936 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |