JP4968069B2 - 異常検出装置付きエンコーダおよびその制御システム - Google Patents
異常検出装置付きエンコーダおよびその制御システム Download PDFInfo
- Publication number
- JP4968069B2 JP4968069B2 JP2007525922A JP2007525922A JP4968069B2 JP 4968069 B2 JP4968069 B2 JP 4968069B2 JP 2007525922 A JP2007525922 A JP 2007525922A JP 2007525922 A JP2007525922 A JP 2007525922A JP 4968069 B2 JP4968069 B2 JP 4968069B2
- Authority
- JP
- Japan
- Prior art keywords
- encoder
- abnormality detection
- detection device
- signal
- abnormality
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images









Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D5/00—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable
- G01D5/12—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means
- G01D5/244—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing characteristics of pulses or pulse trains; generating pulses or pulse trains
- G01D5/24457—Failure detection
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Transmission And Conversion Of Sensor Element Output (AREA)
- Optical Transform (AREA)
Description
図10は、特許文献1に記載された従来のエンコーダ装置の電気的構成を示すブロック図である。
図において、200は、エンコーダ装置で、検出部210、内挿/アラームユニット220及びドライバ230から構成されている。内挿/アラームユニット220は、検出部210からの疑似正弦波信号を内挿して必要な分解能の二相方形波信号するとともに、オーバースピードによるスケールエラーを検出し、アラーム信号−ALを出力する機能を有している。ドライバ230はトライステートバッファで、アラーム信号−ALによってハイインピーダンス状態になる。
また、300は制御装置で、外部から容易に視認可能な位置に設けられた第1のコネクタ270及び第1のコネクタ270と接続された第2のコネクタ280を介してエンコーダ装置200と接続されている。第1のコネクタ270には、電源ラインとアラーム信号線の間にアラーム表示器290が設けられている。
制御装置300が位置指令と位置フィードバックの差から異常を検出した場合、入力信号がハイインピーダンスになっていないかどうかをチェックする。もし、ハイインピーダンスになっている場合、アラーム表示器290が点灯していなければ、ケーブルの断線、接続不良又は制御装置300の異常と判断し、アラーム表示器290が点灯していれば、エンコーダ装置200の不良と判断していた。
このように、従来のエンコーダ装置は、エンコーダ装置に設けられた内挿/アラームユニットで、検出部からの信号を内挿し、二相方形波信号するとともに、スケールエラーを検出し、アラーム信号を出力していた。
請求項1に記載の発明は、被検出体の回転角度または直線位置等の変位を検出するエンコーダであって、前記被検出体の変位に応じた信号を検出する検出部と、前記検出部からの信号を処理し変位に応じた信号を出力するエンコーダ回路と、前記エンコーダの異常状態を検出する異常検出装置とを備えたエンコーダにおいて、前記エンコーダ回路の電源と前記異常検出装置の電源は、それぞれ独立した別電源で供給されるものである。
また、請求項2に記載の発明は、被検出体の回転角度または直線位置等の変位を検出するエンコーダであって、前記被検出体の変位に応じた信号を検出する検出部と、前記検出部からの信号を処理し変位に応じた信号を出力するエンコーダ回路と、前記エンコーダ回路の電源及び出力信号部に接続される第1の配線ケーブルと、前記異常検出装置の電源及び異常信号出力部に接続される第2の配線ケーブルと、前記エンコーダの異常状態を検出する異常検出装置とを備えたエンコーダにおいて、前記エンコーダ回路の電源と前記異常検出装置の電源は、それぞれ独立した別電源で供給され、かつ、前記第1の配線ケーブルと、前記第2の配線ケーブルは、それぞれ別ケーブルを使用するものである。
また、請求項3に記載の発明は、被検出体の回転角度または直線位置等の変位を検出するエンコーダであって、前記被検出体の変位に応じた信号を検出する検出部と、前記検出部からの信号を処理し変位に応じた信号を出力するエンコーダ回路と、前記エンコーダの異常状態を検出する異常検出装置とを備えたエンコーダにおいて、前記異常検出装置の電源は、前記エンコーダ回路の電源から、この電源に接続された逆流防止ダイオードとこの逆流防止ダイオードを通して得られた電荷を蓄積する大容量コンデンサから構成される回路にて供給されることを特徴とするものである。
また、請求項4に記載の発明は、前記エンコーダの異常状態を検出する信号は、前記エンコーダ回路の電源電圧信号であることを特徴とするものである。
また、請求項5に記載の発明は、前記エンコーダの異常状態を検出する信号は、前記角度検出部で検出された波形電圧信号であることを特徴とするものである。
また、請求項6に記載の発明は、前記エンコーダの異常状態を検出する信号は、前記角度検出部のLEDに流れる電流に対応したLED電流信号であることを特徴とするものである。
また、請求項7に記載の発明は、前記異常検出装置は、前記異常検出装置付きエンコーダの環境状態を検出する環境異常検出素子を備えたものである。
また、請求項8に記載の発明は、前記環境異常検出素子を、温度検出素子とするものである。
また、請求項9に記載の発明は、前記環境異常検出素子を、振動検出素子とするものである。
また、請求項10に記載の発明は、前記異常検出装置は、電源投入してから一定時間後に正常動作している事を知らせる信号を送出する機能を具備するものである。
また、請求項11に記載の発明は、前記異常検出装置は、異常検出信号のやり取りを双方向通信で行なう機能を具備する具備するものである。
また、請求項12に記載の発明は、請求項1乃至11のいずれか1項に記載の異常検出装置付きエンコーダを備えたモータと、前記異常検出装置付きエンコーダに接続された制御装置と、前記制御装置からの制御信号によって前記モータを駆動するモータ駆動装置と、を備えた制御システムにおいて、前記制御装置は前記異常検出装置付きエンコーダからの異常信号を検出し、異常状態に応じて前記モータを制御することを特徴とするものである。
請求項1に記載の発明によれば、エンコーダ回路と異常検出装置を独立して具備し、別電源で供給しているので、エンコーダ回路の電源異常が発生した場合、異常検出装置は、速やかに異常信号を送出する事が出来る。従って、エンコーダの信頼性を向上させることが出来る。
請求項2に記載の発明によれば、異常検出装置への配線ケーブルと、エンコーダ回路への配線ケーブルに別ケーブルを使用すれば、エンコーダ回路への配線ケーブルの断線により、エンコーダ回路の電源電圧に異常が発生しても、異常検出装置は、速やかに異常信号を送出する事が出来る。従って、エンコーダの信頼性を向上させることが出来る。
請求項3に記載の発明によれば、異常検出装置の電源を、エンコーダ回路の電源から、電流の逆流を防止する逆流防止ダイオード通過した後、異常検出装置の電源に並列に接続した大容量コンデンサで供給すれば、エンコーダ回路への配線ケーブルの断線等によりエンコーダ回路の電源が遮断されても、異常検出装置の電源が大容量コンデンサにより短時間バックアップされ、この間に異常検出装置から異常検出信号を送出する事により、簡単な構成でエンコーダの信頼性を向上させる事が出来る。
請求項4に記載の発明によれば、エンコーダ回路の電源電圧信号を検出しているので、電源電圧異常によるエンコーダ回路の動作不良を速やかに、あるいは、前もって検出できる。従って、エンコーダの信頼性をさらに向上させる事が出来る。
請求項5に記載の発明によれば、波形電圧信号を検出すれば、波形電圧の異常によるエンコーダ回路の動作不良を速やかに、あるいは、前もって検出できるので、エンコーダの信頼性を向上させる事が出来る。
請求項6に記載の発明によれば、LEDの電流を検出すれば、LED電流の異常によるエンコーダ回路の動作不良を速やかに、あるいは、前もって検出できるので、エンコーダの信頼性を向上させる事が出来る。
請求項7に記載の発明によれば、異常検出装置が環境異常検出素子を備えれば、エンコーダの環境状態の異常によるエンコーダ回路の動作不良を速やかに、あるいは、前もって検出できるので、エンコーダの信頼性を向上させる事が出来る。
請求項8に記載の発明によれば、異常検出装置が温度検出素子を備えれば、エンコーダの温度の異常によるエンコーダ回路の動作不良を速やかに、あるいは、前もって検出できるので、エンコーダの信頼性を向上させる事が出来る。
請求項9に記載の発明によれば、異常検出装置が振動検出素子を備えれば、エンコーダの振動の異常によるエンコーダ回路の動作不良を速やかに、あるいは、前もって検出できるので、エンコーダの信頼性を向上させる事が出来る。
請求項10に記載の発明によれば、異常検出装置が、電源投入してから一定時間後に正常動作している事を知らせる信号を送出する機能を具備すれば、異常検出装置が正常に機能することを検証できるので、異常検出装置の信頼性が向上する。従って、エンコーダの信頼性を向上させる事が出来る。
請求項11に記載の発明によれば、異常検出装置が、異常検出信号のやり取りを双方向通信で行なう機能を具備すれば、常に、異常検出装置が正常に機能することを検証できるので、異常検出装置の信頼性がさらに向上する。従って、エンコーダの信頼性を向上させる事が出来る。
請求項12に記載の発明によれば、制御システムが異常検出装置付きエンコーダの異常信号を検出し、この異常状態に応じて制御装置がどの様に対応すべきか判定し、モータを速やかに停止させるの等の処理を行うので、安全で、高信頼性の制御システムを構成することができる。
20 角度検出部
21 LED
22 固定スリット
23 フォトダイオード
24 ハブ
25 回転ディスク
30 エンコーダ回路
31 オペアンプ
32 コンパレータ
33 抵抗
34 出力信号部
40 異常検出装置
41 異常検出回路
42 異常信号送信回路
43 異常信号出力部
51 逆流防止用ダイオード
52 大容量コンデンサ
60 環境異常検出素子
61 温度検出素子
62 振動検出素子
71 正常信号発生回路
72 双方向異常信号発生回路
81 第1の配線ケーブル
82 第2の配線ケーブル
83 配線ケーブル
90 制御装置
91 受け側異常信号検出回路部
92 受け側制御回路
93 異常信号
94 異常信号出力
100 モータ駆動装置
110 モータ
200 エンコーダ装置
210 検出部
220 内挿/アラームユニット
230 ドライバ
270 第1のコネクタ
280 第2のコネクタ
290 アラーム表示器
300 制御装置
711 電源電圧
712 正常信号発生回路の出力信号
721 異常信号出力部の信号波形
722 異常問い合わせ信号
723 正常動作を示す信号
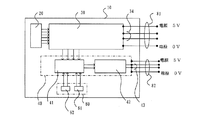
図において、10は異常検出装置付きエンコーダで、回転角度の変位を検出する角度検出部20と、検出信号を波形整形し、変位に応じた信号を出力するエンコーダ回路30と、このエンコーダ回路30の基板への電源ラインとは別の電源ラインを持つ独立した基板上に載置された異常検出装置40で構成されている。また、異常検出装置40は、異常検出回路41と異常信号送信回路42で構成されている。
81はエンコーダ回路30に電源を供給する配線およびエンコーダ回路30の出力信号部34の配線からなる第1の配線ケーブルで、82は異常検出装置40に電源を供給する配線および異常信号出力部43の配線からなる第2の配線ケーブルで、第1の配線ケーブル81と第2の配線ケーブル82は別ケーブルで配線されている。
図2(a)は本実施例の角度検出部20の構成を示す斜視図である。
角度検出部20はLED21、固定スリット22、フォトダイオード23から構成され、図示しない被検出体の回転角度を、ハブ24に固定された回転ディスク25と固定スリット22とフォトダイオード23により検出して、エンコーダ回路30に電気信号として送出している。
図1において、エンコーダ回路30から異常検出回路41に、エンコーダの異常状態を検出するためのエンコーダ各部の信号の状態を示すアナログ信号Aが入力されており、異常検出回路41はこのアナログ信号のレベルが予め設定した所定の範囲内であるかどうかを検出する。所定の範囲外であることが検出されると異常信号を生成し、異常信号送信回路に入力する。
図2(b)は本実施例のエンコーダ回路30の一部の回路を示す回路図である。
図において31はフォトダイオード23で検出された信号を増幅するオペアンプ、32はこの増幅された信号を矩形波に変換するコンパレータである。オペアンプ31の出力は波形電圧信号として異常検出回路41に入力される。また、33はLEDの電流を検出する抵抗で、抵抗33の両端の電圧はLED電流信号として、異常検出回路41に入力される。
エンコーダの状態を示すアナログ信号Aの具体的な例として、下記のa)、b)、c)が挙げられる。
a)エンコーダ回路30の電源電圧を示す電源電圧信号。
b)角度検出部20からエンコーダ回路30に入力された被検出体(図示せず)の変位に応じた信号波形の電圧を示す波形電圧信号。
本実施例では角度検出部から送出された近似正弦波状の信号波形の最大値と最小値を検出した。
c)LED23の電流を示すLED電流信号。
また、アナログ信号を検出しているので、異常検出レベルを状況に合わせて設定でき、検出レベルに余裕を持たせることによって、本エンコーダを適用したシステムが誤動作を起こす前に、安全にシステムを停止することができる。
なお、本発明では、エンコーダ回路30の基板と異常検出装置40の基板は別基板として説明したが、構成部品を簡素化するため、同一基板上に独立して回路を構成しても同じ効果がある。
また、本実施例ではエンコーダ回路においてフォトダイオードの出力を増幅し、コンパレータで矩形波にする回路の例を示したが、フォトダイオードの出力を増幅したアナログ信号を出力する回路であっても良い。
図において、51は逆流防止用ダイオード、52は大容量コンデンサである。また、83は異常信号出力部43の配線からなる配線ケーブルで異常検出装置40への電源の配線を持たない。
本実施例が実施例1と異なる点は、実施例1ではエンコーダ回路30への電源と異常検出装置40への電源は、別々の電源を用いていたが、本実施例では、エンコーダ回路30の電源と異常検出装置40の電源とを共通化し、逆流防止用ダイオード51と大容量コンデンサ52によってエンコーダ回路30の電源から異常検出装置40に電源を供給している点である。
エンコーダ回路30の電源配線が断線などにより、供給不能になった場合、異常検出装置40は、大容量コンデンサ52の容量によってしばらくの間、電源が供給される。この電源が供給される間に異常検出装置40は、エンコーダ回路30の電源異常を検出し、異常信号を送出する。
本実施例では、エンコーダ回路の電源と異常検出装置の電源とを共通化しているので、電源からの配線数が減少し、断線の機会が少なくなるという効果がある。さらに、1つの電源で済むので構成が簡単になるという効果もある。
図において60は、環境異常検出素子である。
本実施例が第1実施例と異なる点は、異常検出装置付きエンコーダ10が、環境異常検出素子60を備えている点である。
本実施例では、環境異常検出素子60として、エンコーダの温度を検出する温度検出素子61と、エンコーダの振動を検出する振動検出素子62を設けた。温度検出素子61としてはサーミスタを用い、振動検出素子62としては加速度センサを用いた。
温度検出素子61によってエンコーダ10の温度が検出され、温度に対応したアナログ信号が異常検出回路41に送られる。また、同様に、振動検出素子62によって、エンコーダ10の振動が検出され、振動に対応したアナログ信号が異常検出回路41に送られる。エンコーダ10の温度や振動が所定の範囲を超えると異常信号を生成する。これらの異常信号は異常信号送信回路42から送出される。
図において、71は正常信号発生回路である。
本実施例が第1実施例と異なる点は、異常検出装置40が、電源投入してから一定時間後に、異常検出装置付きエンコーダ10が正常に動作している事を知らせる正常信号発生回路71を備えている点である。
図6は本実施例の動作を示すタイムチャートである。
図において、711は異常検出装置40の電源電圧、712は正常信号発生回路の出力信号である。
異常検出装置40に電源が投入されると、正常信号発生回路71は異常検出装置40が正常に動作していることを検出し、電源の立ち上がりから正常信号発生回路71で設定したT秒後にハイレベルとなる信号を送出する。電源投入後、直ちにハイレベルにすると、異常検出装置40が故障してハイレベルの信号を送出している可能性があるため、T秒と言う一定時間後に異常検出装置40から正常に動作している事を示す信号を送出する機能を持たせることで検出の信頼性を高めた。
このように本実施例では、異常検出装置が正常信号発生回路を備え、電源投入時に異常検出装置が正常に動作しているかどうかを検出しているので、異常検出装置の信頼性が向上し、エンコーダの信頼性をさらに向上させる事が出来る。
図において、72は図示しない制御装置と双方向で異常検出装置40の動作を調べるための双方向異常信号発生回路である。
本実施例が第4実施例と異なる点は、第4実施例では、異常検出装置40が、正常信号発生回路71を備えていたが、本実施例では双方向異常信号発生回路72を備え、双方向通信で異常検出装置40の動作をチェックしている点である。
請求項1に記載の発明は、被検出体の回転角度または直線位置等の変位を検出するエンコーダであって、前記被検出体の変位に応じた信号を検出する検出部と、前記検出部からの信号を処理し変位に応じた信号を出力するエンコーダ回路と、前記エンコーダの異常状態を検出する異常検出装置とを備えたエンコーダにおいて、前記エンコーダ回路の電源と前記異常検出装置の電源は、それぞれ独立した別電源で供給されるものである。
また、請求項2に記載の発明は、被検出体の回転角度または直線位置等の変位を検出するエンコーダであって、前記被検出体の変位に応じた信号を検出する検出部と、前記検出部からの信号を処理し変位に応じた信号を出力するエンコーダ回路と、前記エンコーダの異常状態を検出する異常検出装置と、前記エンコーダ回路の電源及び出力信号部に接続される第1の配線ケーブルと、前記異常検出装置の電源及び異常信号出力部に接続される第2の配線ケーブルとを備えたエンコーダにおいて、前記エンコーダ回路の電源と前記異常検出装置の電源は、それぞれ独立した別電源で供給され、かつ、前記第1の配線ケーブルと、前記第2の配線ケーブルは、それぞれ別ケーブルを使用するものである。
また、請求項3に記載の発明は、被検出体の回転角度または直線位置等の変位を検出するエンコーダであって、前記被検出体の変位に応じた信号を検出する検出部と、前記検出部からの信号を処理し変位に応じた信号を出力するエンコーダ回路と、前記エンコーダの異常状態を検出する異常検出装置とを備えたエンコーダにおいて、前記異常検出装置の電源は、前記エンコーダ回路の電源から、この電源に接続された逆流防止ダイオードとこの逆流防止ダイオードを通して得られた電荷を蓄積する大容量コンデンサから構成される回路にて供給されることを特徴とするものである。
また、請求項4に記載の発明は、前記エンコーダの異常状態を検出する信号は、前記エンコーダ回路の電源電圧信号であることを特徴とするものである。
また、請求項5に記載の発明は、前記エンコーダの異常状態を検出する信号は、前記角度検出部で検出された波形電圧信号であることを特徴とするものである。
また、請求項6に記載の発明は、前記エンコーダの異常状態を検出する信号は、前記角度検出部のLEDに流れる電流に対応したLED電流信号であることを特徴とするものである。
また、請求項7に記載の発明は、前記異常検出装置は、前記異常検出装置付きエンコーダの環境状態を検出する環境異常検出素子を備えたものである。
また、請求項8に記載の発明は、前記環境異常検出素子を、温度検出素子とするものである。
また、請求項9に記載の発明は、前記環境異常検出素子を、振動検出素子とするものである。
また、請求項10に記載の発明は、前記異常検出装置は、電源投入してから一定時間後に正常動作している事を知らせる信号を送出する機能を具備するものである。
また、請求項11に記載の発明は、前記異常検出装置は、異常検出信号のやり取りを双方向通信で行なう機能を具備する具備するものである。
また、請求項12に記載の発明は、請求項1乃至11のいずれか1項に記載の異常検出装置付きエンコーダを備えたモータと、前記異常検出装置付きエンコーダに接続された制御装置と、前記制御装置からの制御信号によって前記モータを駆動するモータ駆動装置と、を備えた制御システムにおいて、前記制御装置は前記異常検出装置付きエンコーダからの異常信号を検出し、異常状態に応じて前記モータを制御することを特徴とするものである。
図において、90は制御装置、100はモータ駆動装置、110は図示しない工作機械等の産業機械に取り付けられ、本発明の異常検出装置付きエンコーダ10を装備したモータである。制御装置90は受け側異常信号検出回路部91と、受け側制御回路92とを備えている。
異常検出装置付きエンコーダ10から受け側異常信号検出回路部91に異常信号93が送信されると、受け側制御回路92において、モータ110を速やかに停止させるあるいは非常停止する等、どのように対応すべきかを判定し、異常信号出力94をモータ駆動装置100に送信する。
なお、各実施例として、回転型光学式エンコーダについて述べたが、回転型、直線型のいずれか一方に限定されず、また、光学式、磁気式のいずれか一方に限定されないことは言うまでもない。
Claims (12)
- 被検出体の回転角度または直線位置の変位を検出するエンコーダであって、
前記被検出体の変位に応じた信号を検出する検出部と、
前記検出部からの信号を処理し変位に応じた信号を出力するエンコーダ回路と、
前記エンコーダの異常状態を検出する異常検出装置と、
を備え、
前記エンコーダ回路の電源と前記異常検出装置の電源は、それぞれ独立した別電源で供給される、異常検出装置付きエンコーダ。 - 前記エンコーダ回路の電源及び出力信号部に接続される第1の配線ケーブルと、
前記異常検出装置の電源及び異常信号出力部に接続される第2の配線ケーブルと、
を更に備え、
前記第1の配線ケーブルと前記第2の配線ケーブルとは、それぞれ別ケーブルを使用する、請求項1に記載の異常検出装置付きエンコーダ。 - 被検出体の回転角度または直線位置の変位を検出するエンコーダであって、
前記被検出体の変位に応じた信号を検出する検出部と、
前記検出部からの信号を処理し変位に応じた信号を出力するエンコーダ回路と、
前記エンコーダの異常状態を検出する異常検出装置と、
を備え、
前記異常検出装置の電源は、前記エンコーダ回路の電源から、この電源に接続された逆流防止ダイオードとこの逆流防止ダイオードを通して得られた電荷を蓄積する大容量コンデンサを有する回路にて供給される、異常検出装置付きエンコーダ。 - 前記エンコーダの異常状態を検出する信号は、前記エンコーダ回路の電源電圧信号である、請求項1〜3のいずれか1項に記載の異常検出装置付きエンコーダ。
- 前記エンコーダの異常状態を検出する信号は、前記角度検出部で検出された波形電圧信号である、請求項1〜3のいずれか1項に記載の異常検出装置付きエンコーダ。
- 前記エンコーダの異常状態を検出する信号は、前記角度検出部のLEDに流れる電流に対応したLED電流信号である、請求項1〜3のいずれか1項に記載の異常検出装置付きエンコーダ。
- 前記異常検出装置は、前記異常検出装置付きエンコーダの環境状態を検出する環境異常検出素子を備える、請求項1〜3のいずれか1項に記載の異常検出装置付きエンコーダ。
- 前記環境異常検出素子は、温度検出素子である、請求項7に記載の異常検出装置付きエンコーダ。
- 前記環境異常検出素子は、振動検出素子である、請求項7に記載の異常検出装置付きエンコーダ。
- 前記異常検出装置は、電源投入してから一定時間後に正常動作している事を知らせる信号を送出する機能を具備する、請求項1〜3のいずれか1項に記載の異常検出装置付きエンコーダ。
- 前記異常検出装置は、異常検出信号のやり取りを双方向通信で行なう機能を具備する、請求項1〜3のいずれか1項に記載の異常検出装置付きエンコーダ。
- 請求項1〜11のいずれか1項に記載の異常検出装置付きエンコーダを備えたモータと、
前記異常検出装置付きエンコーダに接続された制御装置と、
前記制御装置からの制御信号によって前記モータを駆動するモータ駆動装置と、
を備え、
前記制御装置は、前記異常検出装置付きエンコーダからの異常信号を検出し、異常状態に応じて前記モータを制御する、制御システム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007525922A JP4968069B2 (ja) | 2005-07-19 | 2006-06-27 | 異常検出装置付きエンコーダおよびその制御システム |
Applications Claiming Priority (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005207979 | 2005-07-19 | ||
| JP2005207979 | 2005-07-19 | ||
| PCT/JP2006/312812 WO2007010716A1 (ja) | 2005-07-19 | 2006-06-27 | 異常検出装置付きエンコーダおよびその制御システム |
| JP2007525922A JP4968069B2 (ja) | 2005-07-19 | 2006-06-27 | 異常検出装置付きエンコーダおよびその制御システム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPWO2007010716A1 JPWO2007010716A1 (ja) | 2009-01-29 |
| JP4968069B2 true JP4968069B2 (ja) | 2012-07-04 |
Family
ID=37668602
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2007525922A Expired - Fee Related JP4968069B2 (ja) | 2005-07-19 | 2006-06-27 | 異常検出装置付きエンコーダおよびその制御システム |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US20090229134A1 (ja) |
| JP (1) | JP4968069B2 (ja) |
| CN (1) | CN101223418A (ja) |
| DE (1) | DE112006001925T5 (ja) |
| WO (1) | WO2007010716A1 (ja) |
Families Citing this family (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4574636B2 (ja) * | 2007-03-14 | 2010-11-04 | 株式会社日立製作所 | エレベーター装置 |
| JP4995605B2 (ja) * | 2007-03-16 | 2012-08-08 | オークマ株式会社 | 回転型アブソリュートエンコーダの異常検出装置 |
| US8322214B2 (en) | 2008-04-04 | 2012-12-04 | Panasonic Corporation | Sensor device |
| US8131508B2 (en) * | 2009-02-05 | 2012-03-06 | Panasonic Corporation | Sensor apparatus |
| JP4337952B1 (ja) * | 2009-02-05 | 2009-09-30 | パナソニック株式会社 | センサ装置 |
| JP4386143B1 (ja) * | 2009-02-05 | 2009-12-16 | パナソニック株式会社 | センサ装置 |
| DE102010007349B4 (de) * | 2009-02-09 | 2018-03-01 | Fuji Electric Co., Ltd. | Anomalienüberwachungsvorrichtung |
| JP2011154005A (ja) * | 2010-01-28 | 2011-08-11 | Nikon Corp | エンコーダ |
| JP6193000B2 (ja) * | 2013-06-12 | 2017-09-06 | 株式会社日立製作所 | エンコーダ異常検出装置及びエンコーダ異常検出装置を用いたエレベータ装置 |
| JP2016052223A (ja) * | 2014-09-02 | 2016-04-11 | ソムフィ株式会社 | モータ駆動装置 |
| JP6857818B2 (ja) * | 2016-10-24 | 2021-04-14 | パナソニックIpマネジメント株式会社 | エンコーダの異常検出方法及び異常検出装置、並びにロボット制御システム |
| US10578463B2 (en) * | 2016-12-19 | 2020-03-03 | Microchip Technology Incorporated | Detection of defects in motor position decoder system |
| JP6434571B1 (ja) * | 2017-06-23 | 2018-12-05 | ファナック株式会社 | 消費電流の異常を検知する異常検知部を備えるアブソリュートエンコーダ |
| JP6787939B2 (ja) | 2018-02-20 | 2020-11-18 | ファナック株式会社 | エンコーダおよびバックアップ電流異常判定方法 |
| CN109471049B (zh) * | 2019-01-09 | 2021-09-17 | 南京航空航天大学 | 一种基于改进堆叠自编码器的卫星电源系统异常检测方法 |
| DE102019209607A1 (de) * | 2019-07-01 | 2021-01-07 | Dr. Johannes Heidenhain Gmbh | Positionsmesseinrichtung und Verfahren zum Betreiben einer Positionsmesseinrichtung |
| TWI874700B (zh) * | 2021-08-19 | 2025-03-01 | 達明機器人股份有限公司 | 位置偵測系統 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS63172913U (ja) * | 1987-04-30 | 1988-11-10 | ||
| JPH0325317A (ja) * | 1989-06-23 | 1991-02-04 | Nec Eng Ltd | 回転位置検出回路 |
| JP2000339196A (ja) * | 1999-05-31 | 2000-12-08 | Nec Corp | 異常監視方式 |
Family Cites Families (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH04125408A (ja) * | 1990-09-17 | 1992-04-24 | Futaba Corp | リニアスケール測長装置 |
| DE10056947A1 (de) * | 2000-11-17 | 2002-05-23 | Optolab Licensing Gmbh | Verfahren und Anordnung zur Montage von Messsystemen |
| DE10123292B4 (de) * | 2001-05-13 | 2010-07-22 | Anton Rodi | Sensorsystem |
| DE10244583A1 (de) * | 2002-09-25 | 2004-04-08 | Dr. Johannes Heidenhain Gmbh | Messsystem und Verfahren zu dessen Funktionsüberprüfung |
| JP4142942B2 (ja) * | 2002-12-09 | 2008-09-03 | 株式会社ソキア | ロータリエンコーダ |
| US6973731B2 (en) * | 2003-12-30 | 2005-12-13 | Alps Electric Co., Ltd. | Encoder |
| DE102004024954A1 (de) * | 2004-05-21 | 2005-12-08 | Robert Bosch Gmbh | Sensor für eine Getriebesteuerung insbesondere eines Kraftfahrzeugs |
| DE102008004454B4 (de) * | 2008-01-15 | 2020-02-13 | Asm Automation Sensorik Messtechnik Gmbh | Winkelsensorschaltung |
-
2006
- 2006-06-27 JP JP2007525922A patent/JP4968069B2/ja not_active Expired - Fee Related
- 2006-06-27 CN CNA2006800263867A patent/CN101223418A/zh active Pending
- 2006-06-27 WO PCT/JP2006/312812 patent/WO2007010716A1/ja not_active Ceased
- 2006-06-27 US US11/996,355 patent/US20090229134A1/en not_active Abandoned
- 2006-06-27 DE DE112006001925T patent/DE112006001925T5/de not_active Withdrawn
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS63172913U (ja) * | 1987-04-30 | 1988-11-10 | ||
| JPH0325317A (ja) * | 1989-06-23 | 1991-02-04 | Nec Eng Ltd | 回転位置検出回路 |
| JP2000339196A (ja) * | 1999-05-31 | 2000-12-08 | Nec Corp | 異常監視方式 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN101223418A (zh) | 2008-07-16 |
| JPWO2007010716A1 (ja) | 2009-01-29 |
| US20090229134A1 (en) | 2009-09-17 |
| DE112006001925T5 (de) | 2008-05-21 |
| WO2007010716A1 (ja) | 2007-01-25 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4968069B2 (ja) | 異常検出装置付きエンコーダおよびその制御システム | |
| CN102023608B (zh) | 数值控制装置 | |
| US8659254B2 (en) | Servo system, servo motor driving device, safety unit and method for controlling servo system | |
| CN103308078B (zh) | 旋转编码器以及旋转编码器的异常检测方法 | |
| CN103081052B (zh) | 用于以故障安全的方式接通或断开危险的设备的安全电路装置 | |
| CN108931261B (zh) | 编码器系统和异常检测方法 | |
| JP2008536467A (ja) | モータの内側または外側に取り付けるためのインターフェースモジュール | |
| CN112147507B (zh) | 一种基于闭环控制的电机抱闸状态检测方法及系统 | |
| JPWO2005036288A1 (ja) | シリアル通信による制御システム | |
| JP2007219991A (ja) | 異常負荷検出装置 | |
| JP6434445B2 (ja) | 一回転信号を検出するセンサの故障診断機能を有する工作機械の制御装置 | |
| JP6641920B2 (ja) | 電力変換装置 | |
| JP5215188B2 (ja) | 駆動装置のための監視装置 | |
| KR101207460B1 (ko) | 마운트 보호기능이 강화된 망원경 마운트 제어 시스템 | |
| JP2000193489A (ja) | 位置検出装置およびそれに用いられるケ―ブル | |
| KR102578130B1 (ko) | 자가 진단 기능을 갖는 엔코더 | |
| CN115004540A (zh) | 用于运行驱动系统的设备和方法 | |
| JP7403825B2 (ja) | エンコーダ及び制御システム | |
| JP5043640B2 (ja) | ロータリエンコーダ | |
| JP4912053B2 (ja) | 動力伝達機構付回転電機 | |
| JP2007288891A (ja) | 電力変換装置 | |
| KR102063110B1 (ko) | 인터페이스 제어 장치 및 그에 의한 구동 전압 모니터링 방법 | |
| JP2021012073A (ja) | サーボモータの制御装置 | |
| JPH0675616A (ja) | 工業用ロボットの移動体の位置制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20090213 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20090213 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110905 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20111031 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20111206 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120106 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20120306 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20120319 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20150413 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |