JP4977923B2 - アクティブ型車両視界補助装置及び車両視界補助方法 - Google Patents
アクティブ型車両視界補助装置及び車両視界補助方法 Download PDFInfo
- Publication number
- JP4977923B2 JP4977923B2 JP2010046429A JP2010046429A JP4977923B2 JP 4977923 B2 JP4977923 B2 JP 4977923B2 JP 2010046429 A JP2010046429 A JP 2010046429A JP 2010046429 A JP2010046429 A JP 2010046429A JP 4977923 B2 JP4977923 B2 JP 4977923B2
- Authority
- JP
- Japan
- Prior art keywords
- pixel
- pixel value
- wavelength
- reference area
- identification target
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images



Classifications
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V10/00—Arrangements for image or video recognition or understanding
- G06V10/10—Image acquisition
- G06V10/12—Details of acquisition arrangements; Constructional details thereof
- G06V10/14—Optical characteristics of the device performing the acquisition or on the illumination arrangements
- G06V10/143—Sensing or illuminating at different wavelengths
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N7/00—Television systems
- H04N7/18—Closed-circuit television [CCTV] systems, i.e. systems in which the video signal is not broadcast
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/10—Segmentation; Edge detection
- G06T7/194—Segmentation; Edge detection involving foreground-background segmentation
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/50—Context or environment of the image
- G06V20/56—Context or environment of the image exterior to a vehicle by using sensors mounted on the vehicle
- G06V20/58—Recognition of moving objects or obstacles, e.g. vehicles or pedestrians; Recognition of traffic objects, e.g. traffic signs, traffic lights or roads
- G06V20/584—Recognition of moving objects or obstacles, e.g. vehicles or pedestrians; Recognition of traffic objects, e.g. traffic signs, traffic lights or roads of vehicle lights or traffic lights
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R2300/00—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle
- B60R2300/30—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle characterised by the type of image processing
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R2300/00—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle
- B60R2300/30—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle characterised by the type of image processing
- B60R2300/307—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle characterised by the type of image processing virtually distinguishing relevant parts of a scene from the background of the scene
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/10—Image acquisition modality
- G06T2207/10048—Infrared image
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/10—Image acquisition modality
- G06T2207/10141—Special mode during image acquisition
- G06T2207/10152—Varying illumination
Landscapes
- Engineering & Computer Science (AREA)
- Multimedia (AREA)
- Theoretical Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Signal Processing (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Image Analysis (AREA)
- Image Processing (AREA)
- Traffic Control Systems (AREA)
- Closed-Circuit Television Systems (AREA)
- Investigating Or Analysing Materials By Optical Means (AREA)
- Mechanical Engineering (AREA)
Description
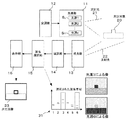
12 変調部
13 受光部
14 演算部
15 波長選択部
16 表示部
17 データベース部
20 測定対象
21 照射光
22 反射光
23 出力画像
Claims (10)
- 対象物に向けてピーク波長が異なる複数の波長帯域の光を切り替えて照射する光源部と、
前記対象物からの反射光を受けて、前記複数の波長帯域ごとの画像を表す信号を生成する受光部と、
少なくとも1つの前記画像において画素間の信号強度を比較し、同等の信号強度を有する画素のうち占有面積が最大となる画素の集合を基準エリアと設定し、前記基準エリア以外の画素を識別対象画素として各識別対象画素ごとに、波長帯域ごとの画像での当該画素の値と前記基準エリアでの画素値とを比較することによって対象物の検出に有効な少なくとも2つの波長帯域を選択する波長選択部と、
前記識別対象画素ごとに前記波長選択部によって選択された複数の波長帯域の組み合わせに基づいて、前記識別対象画素をグループ化し、グループ化した結果に基づいて、前記対象物を区別して表示した画像を表示する表示部と、
を有する、アクティブ型車両視界補助装置。 - 前記光源部から前記光を照射していないときに前記受光部で得られた信号に基づいて、前記複数の波長帯域ごとの画像を表す信号を補正する演算部を有する、請求項1に記載のアクティブ型車両視界補助装置。
- 複数の波長帯域の画像を用いて前記基準エリアを設定する、請求項1または2に記載のアクティブ型車両視界補助装置。
- 前記波長選択部は、各識別対象画素ごとに、全ての波長帯域において当該識別対象画素の画素値が基準エリアの画素値以上である第1の場合には、当該識別対象画素の画素値から前記基準エリアの画素値を引いた値が最大となる波長帯域と最小となる波長帯域とを選択し、全ての波長帯域において当該識別対象画素の画素値が前記基準エリアの画素値以下である第2の場合には、前記基準エリアの画素値から当該識別対象画素の画素値を引いた値が最大となる波長帯域と最小となる波長帯域とを選択し、前記第1及び第2の場合以外の場合である第3の場合には、前記基準エリアの画素値を基準として、当該識別対象画素の画素値が正の方向に最大となる波長帯域と負の方向に最大となる波長帯域とを選択することにより、2つの波長帯域を選択する、請求項1乃至3のいずれか1項に記載のアクティブ型車両視界補助装置。
- 対象物の種類ごとに当該対象物のスペクトルデータを保持するデータベースを備え、
前記表示部は、前記データベースを検索して前記対象物を識別し、識別結果を表示する、請求項1乃至4のいずれか1項に記載のアクティブ型車両視界補助装置。 - 対象物に向けてピーク波長が異なる複数の波長帯域の光を切り替えて照射する段階と、
前記対象物からの反射光を受けて、前記複数の波長帯域ごとの画像を表す信号を生成する段階と、
少なくとも1つの前記画像において画素間の信号強度を比較し、同等の信号強度を有する画素のうち占有面積が最大となる画素の集合を基準エリアと設定する段階と、
前記基準エリア以外の画素を識別対象画素として各識別対象画素ごとに、波長帯域ごとの画像での当該画素の値と前記基準エリアでの画素値とを比較することによって対象物の検出に有効な少なくとも2つの波長帯域を選択する段階と、
前記識別対象画素ごとに前記波長選択部によって選択された複数の波長帯域の組み合わせに基づいて、前記識別対象画素をグループ化する段階と、
グループ化した結果に基づいて、前記対象物を区別して表示した画像を表示する段階と、
を有する、車両視界補助方法。 - 前記対象物に光を照射していないときに得られる信号に基づいて、前記複数の波長帯域ごとの画像を表す信号を補正する段階を有する、請求項6に記載の車両視界補助方法。
- 複数の波長帯域の画像を用いて前記基準エリアを設定する、請求項6または7に記載の車両視界補助方法。
- 各識別対象画素ごとに、全ての波長帯域において当該識別対象画素の画素値が基準エリアの画素値以上である第1の場合には、当該識別対象画素の画素値から前記基準エリアの画素値を引いた値が最大となる波長帯域と最小となる波長帯域とを選択し、全ての波長帯域において当該識別対象画素の画素値が前記基準エリアの画素値以下である第2の場合には、前記基準エリアの画素値から当該識別対象画素の画素値を引いた値が最大となる波長帯域と最小となる波長帯域とを選択し、前記第1及び第2の場合以外の場合である第3の場合には、前記基準エリアの画素値を基準として、当該識別対象画素の画素値が正の方向に最大となる波長帯域と負の方向に最大となる波長帯域とを選択することにより、2つの波長帯域を選択する、請求項6乃至8のいずれか1項に記載の車両視界補助方法。
- 対象物の種類ごとに当該対象物のスペクトルデータを保持するデータベースを検索して前記対象物を識別し、識別結果を表示する、請求項6乃至9のいずれか1項に記載の車両視界補助方法。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010046429A JP4977923B2 (ja) | 2010-03-03 | 2010-03-03 | アクティブ型車両視界補助装置及び車両視界補助方法 |
| US13/038,567 US8854464B2 (en) | 2010-03-03 | 2011-03-02 | Active visibility support apparatus and method for vehicle |
| CN201110053242.3A CN102194103B (zh) | 2010-03-03 | 2011-03-03 | 用于车辆的主动可视性支持设备和方法 |
| DE102011005056A DE102011005056A1 (de) | 2010-03-03 | 2011-03-03 | Aktives Sichthilfegerät und -verfahren für Fahrzeug |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010046429A JP4977923B2 (ja) | 2010-03-03 | 2010-03-03 | アクティブ型車両視界補助装置及び車両視界補助方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2011182300A JP2011182300A (ja) | 2011-09-15 |
| JP4977923B2 true JP4977923B2 (ja) | 2012-07-18 |
Family
ID=44531014
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010046429A Expired - Fee Related JP4977923B2 (ja) | 2010-03-03 | 2010-03-03 | アクティブ型車両視界補助装置及び車両視界補助方法 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US8854464B2 (ja) |
| JP (1) | JP4977923B2 (ja) |
| CN (1) | CN102194103B (ja) |
| DE (1) | DE102011005056A1 (ja) |
Families Citing this family (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8810658B2 (en) * | 2012-02-02 | 2014-08-19 | Xerox Corporation | Estimating a visible vector representation for pixels in an infrared image |
| JP6089436B2 (ja) * | 2012-04-18 | 2017-03-08 | ソニー株式会社 | 画像処理装置と画像処理装置の作動方法および撮像装置 |
| KR102041633B1 (ko) * | 2013-05-14 | 2019-11-06 | 현대모비스 주식회사 | 물체 인식 시스템 |
| KR102129588B1 (ko) * | 2013-06-26 | 2020-07-02 | 현대모비스(주) | 물체 인식 시스템 |
| US20150185017A1 (en) * | 2013-12-28 | 2015-07-02 | Gregory L. Kreider | Image-based geo-hunt |
| DE102014204002A1 (de) | 2014-03-05 | 2015-09-10 | Conti Temic Microelectronic Gmbh | Verfahren zur Identifikation eines projizierten Symbols auf einer Straße in einem Fahrzeug, Vorrichtung und Fahrzeug |
| US10576948B2 (en) * | 2015-12-08 | 2020-03-03 | Airbus Group India Private Limited | Aircraft braking based on real time runway condition |
| US10336465B2 (en) | 2016-01-08 | 2019-07-02 | The Regents Of The University Of Michigan | Ice crystals and volcanic ash detection system |
| CN113232647A (zh) * | 2016-12-07 | 2021-08-10 | 厦门大学 | 一种车前物体识别方法及其识别装置 |
| US10621865B2 (en) | 2018-03-29 | 2020-04-14 | The Regents Of The University Of Michigan | Road condition monitoring system |
| US10508952B1 (en) | 2018-10-31 | 2019-12-17 | The Regents Of The University Of Michigan | Optimum spectral bands for active vision systems |
| GB2609914A (en) * | 2021-08-12 | 2023-02-22 | Continental Automotive Gmbh | A monitoring system and method for identifying objects |
Family Cites Families (25)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH1196333A (ja) | 1997-09-16 | 1999-04-09 | Olympus Optical Co Ltd | カラー画像処理装置 |
| US6072889A (en) * | 1997-12-03 | 2000-06-06 | The Raytheon Company | Method and system for imaging target detection |
| JP3897206B2 (ja) * | 1998-04-27 | 2007-03-22 | ホーチキ株式会社 | 異常監視装置 |
| JP3819187B2 (ja) | 1999-09-28 | 2006-09-06 | 富士写真フイルム株式会社 | マルチバンド画像の分光反射率のスペクトル推定方法およびスペクトル推定システム |
| JP3612565B2 (ja) * | 2002-02-20 | 2005-01-19 | 国土交通省国土技術政策総合研究所長 | 路面状況判定方法 |
| DE10303044A1 (de) * | 2003-01-24 | 2004-08-12 | Daimlerchrysler Ag | Vorrichtung und Verfahren zur Verbesserung der Sicht in Kraftfahrzeugen |
| DE10343479A1 (de) * | 2003-09-19 | 2005-04-28 | Bosch Gmbh Robert | Verfahren zur Verbesserung der Sicht in einem Kraftfahrzeug |
| JP2005115631A (ja) | 2003-10-07 | 2005-04-28 | Olympus Corp | 画像表示装置及び画像表示方法 |
| JP4143521B2 (ja) * | 2003-11-12 | 2008-09-03 | 三菱電機株式会社 | 車載用カメラ |
| JP4323991B2 (ja) * | 2004-03-19 | 2009-09-02 | 大日本スクリーン製造株式会社 | 分光反射率測定装置、膜厚測定装置および分光反射率測定方法 |
| JP2005318408A (ja) * | 2004-04-30 | 2005-11-10 | Nissan Motor Co Ltd | 車両周囲監視装置および方法 |
| CN101263445A (zh) | 2005-08-03 | 2008-09-10 | 格瑞德网络传输私人有限公司 | 信息输出装置、媒体及信息输入/输出装置 |
| JP4353162B2 (ja) * | 2005-09-26 | 2009-10-28 | トヨタ自動車株式会社 | 車輌周囲情報表示装置 |
| JP2007208413A (ja) * | 2006-01-31 | 2007-08-16 | Olympus Corp | 色補正装置および色補正方法ならびに色補正プログラム |
| JP4940791B2 (ja) | 2006-07-04 | 2012-05-30 | 富士通株式会社 | テスト支援プログラム、テスト支援装置、およびテスト支援方法 |
| US7693331B2 (en) * | 2006-08-30 | 2010-04-06 | Mitsubishi Electric Research Laboratories, Inc. | Object segmentation using visible and infrared images |
| JP2008152709A (ja) | 2006-12-20 | 2008-07-03 | Hitachi Software Eng Co Ltd | 地理画像処理装置、及びプログラム |
| US8160382B2 (en) * | 2007-10-15 | 2012-04-17 | Lockheed Martin Corporation | Method of object recognition in image data using combined edge magnitude and edge direction analysis techniques |
| JP5080934B2 (ja) * | 2007-10-22 | 2012-11-21 | キヤノン株式会社 | 画像処理装置及び方法、及び撮像装置 |
| JP2009253857A (ja) * | 2008-04-09 | 2009-10-29 | Toyota Motor Corp | 車両用周辺監視装置 |
| JP4943392B2 (ja) | 2008-08-25 | 2012-05-30 | 京楽産業.株式会社 | 遊技機 |
| US8081797B2 (en) * | 2008-10-10 | 2011-12-20 | Institut National D'optique | Selective and adaptive illumination of a target |
| JP4918732B2 (ja) | 2010-03-05 | 2012-04-18 | 日本電気株式会社 | 光測定装置及び方法 |
| JP5519381B2 (ja) | 2010-04-09 | 2014-06-11 | トヨタ自動車株式会社 | スペクトル測定装置 |
| JP5060580B2 (ja) | 2010-04-09 | 2012-10-31 | トヨタ自動車株式会社 | スペクトル測定装置 |
-
2010
- 2010-03-03 JP JP2010046429A patent/JP4977923B2/ja not_active Expired - Fee Related
-
2011
- 2011-03-02 US US13/038,567 patent/US8854464B2/en not_active Expired - Fee Related
- 2011-03-03 DE DE102011005056A patent/DE102011005056A1/de not_active Withdrawn
- 2011-03-03 CN CN201110053242.3A patent/CN102194103B/zh not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| US8854464B2 (en) | 2014-10-07 |
| JP2011182300A (ja) | 2011-09-15 |
| US20110216196A1 (en) | 2011-09-08 |
| CN102194103B (zh) | 2016-03-23 |
| DE102011005056A1 (de) | 2011-12-01 |
| CN102194103A (zh) | 2011-09-21 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4977923B2 (ja) | アクティブ型車両視界補助装置及び車両視界補助方法 | |
| KR101417571B1 (ko) | 물체 식별 장치 | |
| CN104512411B (zh) | 车辆控制系统及图像传感器 | |
| US10482347B2 (en) | Inspection of the contoured surface of the undercarriage of a motor vehicle | |
| EP3367084B1 (en) | Road surface state determination device and method | |
| CN113383280A (zh) | 用于经由雾的图像增强的弹道光调制 | |
| CN110431562B (zh) | 图像识别装置 | |
| KR20130086066A (ko) | 화상 입력 장치 및 화상 처리 장치 | |
| CN114514565B (zh) | 物体识别装置和存储介质 | |
| JP2016196233A (ja) | 車両用道路標識認識装置 | |
| CN101281914A (zh) | 成像器半导体器件、摄像机系统和用于建立图像的方法 | |
| KR20120007734A (ko) | 거리 측정 모듈 및 이를 포함하는 디스플레이 장치, 디스플레이 장치의 거리 측정 방법 | |
| JP5839253B2 (ja) | 物体検出装置及びこれを備えた車載機器制御装置 | |
| EP2747027A1 (en) | Method for determining the visibility of objects in a field of view of a driver of a vehicle, taking into account a contrast sensitivity function, driver assistance system, and motor vehicle | |
| US9898676B2 (en) | Method for determining the level of degradation of a road marking | |
| JP2020121615A (ja) | 車両用道路標識認識支援装置 | |
| JP4732985B2 (ja) | 画像処理装置 | |
| JP4064556B2 (ja) | 降雨雪状況検出方法およびその装置 | |
| JP2020193957A (ja) | 測距異常を補正する距離画像生成装置 | |
| JP4765113B2 (ja) | 車両周辺監視装置、車両、車両周辺監視用プログラム、車両周辺監視方法 | |
| JP5746116B2 (ja) | 車両用監視装置 | |
| KR101405327B1 (ko) | 차량용 감지장치 | |
| JP5904825B2 (ja) | 画像処理装置 | |
| JP4710437B2 (ja) | 対象物探索装置 | |
| JP4882592B2 (ja) | 光抽出装置、光抽出方法及び距離計測システム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20111206 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120104 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120302 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20120321 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20120402 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20150427 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4977923 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |