JP4981737B2 - 監視システム - Google Patents
監視システム Download PDFInfo
- Publication number
- JP4981737B2 JP4981737B2 JP2008112883A JP2008112883A JP4981737B2 JP 4981737 B2 JP4981737 B2 JP 4981737B2 JP 2008112883 A JP2008112883 A JP 2008112883A JP 2008112883 A JP2008112883 A JP 2008112883A JP 4981737 B2 JP4981737 B2 JP 4981737B2
- Authority
- JP
- Japan
- Prior art keywords
- monitoring
- distance
- infrared camera
- image
- monitoring system
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000012544 monitoring process Methods 0.000 title claims description 237
- 238000003384 imaging method Methods 0.000 claims description 30
- 238000005259 measurement Methods 0.000 claims description 18
- 238000012545 processing Methods 0.000 description 30
- 238000005286 illumination Methods 0.000 description 8
- 238000001514 detection method Methods 0.000 description 6
- 238000010586 diagram Methods 0.000 description 5
- 230000005540 biological transmission Effects 0.000 description 2
- 238000004364 calculation method Methods 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 239000003086 colorant Substances 0.000 description 1
- 238000012790 confirmation Methods 0.000 description 1
- 238000013461 design Methods 0.000 description 1
- 238000000034 method Methods 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- 230000000007 visual effect Effects 0.000 description 1
Images











Landscapes
- Studio Devices (AREA)
Description
特許文献1には、赤外線カメラと高感度カラーカメラとを組み合わせて監視カメラ装置を構成し、赤外線カメラで広域を探知し、赤外線カメラにおいて物体が探知された場合に、その方向へ高感度カラーカメラを向けて鮮明な画像を得ることが開示されている。
本発明は、所定の監視領域までの距離を計測する距離計測手段と、前記監視領域の監視画像を取得する撮像手段と、前記撮像手段によって取得された前記監視画像を表示する表示手段と、監視の対象となる監視対象の想定サイズ、前記監視画像上で前記監視対象を視認するのに必要とされる最小画素数、及び前記距離計測手段によって計測された前記監視領域までの距離に基づいて、前記撮像手段によって取得される監視画面上で前記監視対象を前記最小画素数以上の画素数で表示可能な領域とそれ以外の領域とに区分する境界を求める境界設定手段とを備え、前記表示手段は、前記境界設定手段によって設定された前記境界によって区分けされた監視画像を表示する監視システムを提供する。
更に、このように、監視画面を2つの領域に区分することで、操作員は、確認しなければならない領域と確認しなくてもよい領域とを明確に把握することができる。この結果、操作員は、無駄な領域を見る必要がなくなり、監視効率を高めることが可能となる。
また、本発明の他の例としての態様は、所定の監視領域までの距離を計測する距離計測手段と、前記監視領域の監視画像を取得する撮像手段と、前記撮像手段によって取得された前記監視画像を表示する表示手段と、監視の対象となる監視対象の想定サイズ、前記監視画像上で前記監視対象を視認するのに必要となる最小画素数、及び前記距離計測手段によって計測された前記監視領域までの距離に基づいて、前記撮像手段の画角を決定する撮影条件設定手段とを備え、前記撮像手段が前記撮像条件設定手段によって設定された前記画角により撮影を実行する監視システムである。
このような構成によれば、赤外線カメラ等のような撮像手段により取得される監視画面において、監視対象が視認可能に表示される適切な画角が撮影条件設定手段により設定され、この画角で撮像手段による監視が開始されるので、監視領域に監視対象が存在した場合には、その監視対象が確実に表示手段に視認可能に表示されることとなる。これにより、監視対象の見落としを抑制することができ、監視性能の向上を図ることができる。
上記監視システムは、入力手段を備え、前記撮影条件設定手段は、前記入力手段から入力された前記監視対象の想定サイズ、前記監視画像上で前記監視対象を視認するのに必要となる画素数を用いて前記画角を設定することとしてもよい。
このような構成によれば、操作員が監視対象の想定サイズ等を入力、設定することが可能となる。
〔第1の実施形態〕
図1は、本発明の第1の実施形態に係る監視システムの概略構成を示したブロック図である。図1に示すように、本実施形態に係る監視システム1は、レーザレンジファインダ(距離計測手段)11、赤外線カメラ(撮像手段)12、表示装置(表示手段)13、入力装置(入力手段)14及び処理装置(撮影条件設定手段)15を備えている。
表示装置13は、表示モニタを備えており、赤外線カメラ12によって取得された監視画像を表示モニタに表示させる。
なお、本実施形態では、想定サイズ、最小画素数について、入力装置14から入力されることを想定したが、これに代えて、処理装置15が備える記憶装置にこれらの情報を予め登録しておき、この情報を読み出して設定することとしてもよい。
また、図3において、θ0は距離L0と監視システム1とを結ぶ線と監視システム1から鉛直方向に下ろした線とのなす角、θ1はデフォルト設定における赤外線カメラ12の画角、θ2は赤外線カメラ12の向き(ここでは垂直画角の中心方向の角度を示している)、hは監視システム1の高度を示している。
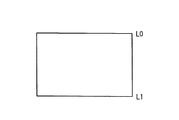
図4は、図3に示されるように、デフォルトの設定にて赤外線カメラ12が撮像を行った場合の監視画面を示した図である。監視画像において、上端が距離L2の位置、下端が距離L1の位置に設定されている。
まず、操作者によって入力装置14が操作されることにより、監視対象の想定サイズA、表示装置13に表示された監視画面上で監視対象を視認するのに必要とされる最小画素数q×qが入力される(図2のステップSA1)。
算出は以下の方法により行われる。
次に、図7に示されるように、監視システム1からの距離L0´において、1画素当たりA/q(m)を撮像することから、赤外線カメラ12の1画素当たりの画角(分解能)θmは、以下の(1)式により導出される。
L2´/L0´=sinθ0から、L2´=L0´・sinθ0 (5)
L1´・h=tan(θ2´−1/2×θ1´)から、L1´
=(L0´・cosθ0)×(tan(θ2´−1/2×θ1´))(6)
A/q=0.25(m)
θm≒14×10−3(°)
θ1´≒9.2(°)
θ2´≒55.4(°)
h=500(m)、L2´=866、L1´=613(m)
これにより、赤外線カメラ12は、処理装置15によって設定された画角及び向きで撮像を行う(図2のステップSA4)。そして、取得した監視領域の監視画像を表示装置13に出力する。これにより、表示装置13の表示画面には、図6に示すように、距離L1からL0を画像の上下端に設定した監視画面が表示されることとなる(図2のステップSA5)。
次に、本発明の第2の実施形態に係る監視システムについて説明する。
上述した第1の実施形態では、距離計測手段としてレーザレンジファインダ11を採用していたが、本実施形態に係る監視システムでは、レーザレーダ20を採用する。
レーザレーダ20は、図8に示すように、照明光を射出する送光部21と、送光部21から射出された照明光が物体に到達し、物体により反射された反射光が到達するタイミングにあわせてシャッタを開き、取り込んだ反射光を画像信号に変換して出力する受光部22と、送光部21の射出タイミングや受光部22におけるシャッタの開閉タイミング等、各部の制御を行うレーザレーダ制御部23とを備えている。
このようにして、明るい画像が得られたときの照明光の射出タイミングと受光部22のシャッタの開閉タイミングとに基づいて距離を求める。
例えば、上述した第1の実施形態に係る監視システム1のように、レーザレンジファインダ11を用いて距離を計測する場合、距離の計測は、監視領域において操作者によって指定されたある地点に限定されて行われることとなり、広域にわたる測距は難しい。
これに対し、レーザレーダ20は広域に照明光を照射し、その反射光に基づいて距離を計測することができることから、照明光が照射された領域に何らかの物体があれば、距離を計測することが可能となる。このように、レーザレーダ20を採用することで、レーザレンジファインダ11を用いる場合に比べて、広域にわたる距離計測を行うことが可能となり、測距を効率的に行うことができる。
次に、本発明の第3の実施形態に係る監視システムについて図を参照して説明する。
本実施形態に係る監視システム1´は、上述した第1の実施形態に係る監視システム1と構成を略同じくするが、図9に示すように、処理装置(境界設定手段)15´が表示装置13´と接続されている点、及び処理装置15´によって行われる処理内容及び表示装置13´に表示される監視画面の構成が異なる。
以下、本実施形態の監視システム1´について、第1の実施形態に係る監視システム1と共通する点については説明を省略し、異なる点について主に説明する。
まず、操作者によって、監視対象の想定サイズ、監視対象を視認するのに必要とされる最小画素数等が入力されると、これらの入力情報は処理装置15´に出力される(図10のステップSB1)。
次に、レーザレンジファインダ11により監視領域までの距離が計測され、計測距離が処理装置15´に出力される(図10のステップSB2)。
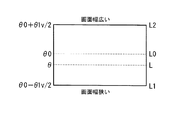
例えば、図11に示すように、上記レーザレンジファインダ11によって取得された監視領域までの距離がL0´であり、また、監視画面中央をレーザレンジファインダ11による測距点とした場合を想定すると、図12に示すように、監視画面の各位置は赤外線カメラ12の角度θ0を用いて表され、画面の下端はθ0−(θ1v/2)、上端はθ0+(θ1v/2)と表すことができる。ここで、θ1vは赤外線カメラ12の垂直画角である。
1画素当たりの撮影サイズ及び画素数から撮影領域の幅W´は、以下の(7)式で得られる。
W´=A/q×px(m) (7)
ここで、pxは、赤外線カメラ12の水平方向の画素数である。
h=L0´・cosθ0 (8)
L´´=h/cosθ (9)
例えば、監視画面の下端及び上端に対応する監視領域の各位置L1,L2までの距離L1´´,L2´´は、上記(9)式から以下のように表される。
L1´´=h/cos(θ0−θ1v/2)
L2´´=h/cos(θ0+θ1v/2)
W=2L´´・tan(θ1h/2) (10)
W´=160(m)
h=400(m)
L1´´=715(m)
L2´´=912(m)
(画面上端での画面幅191m,下端での画面幅150m)
L´´=761(m)
θ=58°
(画面下から約30%の位置)
例えば、表示装置13´は、図11に示すように、監視画像上に境界を記載することで、2つの領域を区分した監視画像を生成し、この監視画像を表示画面に表示させる。又は、境界を記載するだけではなく、2つの領域をそれぞれ色分けして表示させてもよい。
次に、本発明の第4の実施形態に係る監視システムについて説明する。
上述した各実施形態に係る監視システムでは、赤外線カメラ12によって監視を継続して行う場合について述べたが、本実施形態に係る監視システムでは、赤外線カメラ12による探索によって監視対象が検知された場合には、赤外線カメラ12による探知からレーザレーダ20(図8参照)による探知に切り替えることとする。
例えば、上述した各実施形態において、監視対象が検知された後においては、監視を継続して行うとともに、測距手段によって測定された距離情報や監視画面中に映し出された監視対象の画素数等から処理装置15、15´が監視対象の大きさを算出することとしてもよい。このようにすることで、監視対象の追跡だけでなく、大きさの情報も取得することができる。
11 レーザレンジファインダ
12 赤外線カメラ
13,13´ 表示装置
14 入力装置
15,15´ 処理装置
20 レーザレーダ
21 送光部
22 受光部
23 レーザレーダ制御部
Claims (5)
- 所定の監視領域までの距離を計測する距離計測手段と、
前記監視領域の監視画像を取得する撮像手段と、
前記撮像手段によって取得された前記監視画像を表示する表示手段と、
監視の対象となる監視対象の想定サイズ、前記監視画像上で前記監視対象を視認するのに必要とされる最小画素数、及び前記距離計測手段によって計測された前記監視領域までの距離に基づいて、前記撮像手段によって取得される監視画面上で前記監視対象を前記最小画素数以上の画素数で表示可能な領域とそれ以外の領域とに区分する境界を求める境界設定手段と
を備え、
前記表示手段は、前記境界設定手段によって設定された前記境界によって区分けされた監視画像を表示する監視システム。 - 前記撮像手段の位置が変動した場合に、その変動量を計測する変動量計測手段を備え、
前記境界設定手段は、前記変動量計測手段によって計測された変動量に基づいて前記監視画面上に表示させる境界を変更する請求項1に記載の監視システム。 - 前記距離計測手段は、レーザレーダである請求項1または請求項2に記載の監視システム。
- 前記撮像手段は、赤外線カメラまたは可視カメラであり、
前記赤外線カメラまたは可視カメラによって取得された監視画面において監視対象が検知された場合に、前記レーザレーダを用いて該監視対象の監視を継続して行う請求項3に記載の監視システム。 - 前記監視対象が検知された場合に、前記距離計測手段によって前記監視対象までの測距を行い、この測距結果及び前記撮像条件設定手段又は境界設定手段からの情報に基づいて前記監視対象の大きさを算出する請求項1から請求項4のいずれかに記載の監視システム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008112883A JP4981737B2 (ja) | 2008-04-23 | 2008-04-23 | 監視システム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008112883A JP4981737B2 (ja) | 2008-04-23 | 2008-04-23 | 監視システム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2009267627A JP2009267627A (ja) | 2009-11-12 |
| JP4981737B2 true JP4981737B2 (ja) | 2012-07-25 |
Family
ID=41392948
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008112883A Active JP4981737B2 (ja) | 2008-04-23 | 2008-04-23 | 監視システム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4981737B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2017128155A1 (zh) * | 2016-01-27 | 2017-08-03 | 赵政荣 | 自动调节行车记录仪时的信息提示方法以及行车记录仪 |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2017128154A1 (zh) * | 2016-01-27 | 2017-08-03 | 赵政荣 | 行车记录仪调节技术的数据采集方法以及行车记录仪 |
| WO2020059064A1 (ja) | 2018-09-20 | 2020-03-26 | 日本電気株式会社 | 算出装置、情報処理方法および記憶媒体 |
| KR102827869B1 (ko) * | 2020-05-12 | 2025-06-30 | 한화비전 주식회사 | 적외선 카메라 |
Family Cites Families (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4576179B2 (ja) * | 2004-08-31 | 2010-11-04 | Hoya株式会社 | 撮影装置 |
| JP2006317304A (ja) * | 2005-05-13 | 2006-11-24 | Mitsubishi Heavy Ind Ltd | 監視装置 |
-
2008
- 2008-04-23 JP JP2008112883A patent/JP4981737B2/ja active Active
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2017128155A1 (zh) * | 2016-01-27 | 2017-08-03 | 赵政荣 | 自动调节行车记录仪时的信息提示方法以及行车记录仪 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2009267627A (ja) | 2009-11-12 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR101073076B1 (ko) | 복합카메라를 이용한 화재감시 시스템 및 방법 | |
| JP6860003B2 (ja) | 無人飛行装置制御システム、無人飛行装置制御方法および検査装置 | |
| JP5623227B2 (ja) | 測定方法及び測定装置 | |
| US20100104193A1 (en) | Millimetric wave imaging device and captured image display device | |
| WO2015154508A1 (zh) | 塔机视频监控控制设备、方法、系统及塔机 | |
| JP2008241304A (ja) | 物体検知装置 | |
| JP4981737B2 (ja) | 監視システム | |
| US9671217B2 (en) | Structure measuring unit for tracking, measuring and marking edges and corners of adjacent surfaces | |
| JP6576474B2 (ja) | 撮影支援装置及び撮影支援方法 | |
| KR101204870B1 (ko) | 감시 카메라 시스템 및 그의 제어방법 | |
| EP4063985A1 (en) | Aerial inspection system | |
| JP2016057063A (ja) | 測定対象物の非接触検知方法及びその装置 | |
| JP2007274530A (ja) | 監視カメラ装置 | |
| JP6818317B2 (ja) | 波浪監視システム | |
| JP4301051B2 (ja) | 港湾監視システム | |
| JP2011095112A (ja) | 三次元位置測定装置、飛翔体のマッピングシステム、およびコンピュータプログラム | |
| JP6707933B2 (ja) | 無人飛行装置制御システム、無人飛行装置制御方法および無人飛行装置 | |
| JP2023542863A (ja) | パノラマ音響画像を生成し、セグメント化によって音響撮像デバイスを仮想化するためのシステム及び方法 | |
| JP5262148B2 (ja) | ランドマーク検出装置および方法ならびにプログラム | |
| JP2006317304A (ja) | 監視装置 | |
| JP5192881B2 (ja) | 監視装置 | |
| JP5051839B2 (ja) | 視標位置測定装置 | |
| JP2005090846A (ja) | 射撃システム | |
| JP2009139319A (ja) | 画像送信機能付き測量装置、撮像ユニット、測量方法 | |
| WO2017158240A1 (en) | Method and apparatus for monitoring a position |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20100804 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20111201 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20111206 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120203 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20120327 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20120420 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20150427 Year of fee payment: 3 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 4981737 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |