JP5114044B2 - 生物学的構造を有する画像を切り出す方法及びシステム - Google Patents
生物学的構造を有する画像を切り出す方法及びシステム Download PDFInfo
- Publication number
- JP5114044B2 JP5114044B2 JP2006316433A JP2006316433A JP5114044B2 JP 5114044 B2 JP5114044 B2 JP 5114044B2 JP 2006316433 A JP2006316433 A JP 2006316433A JP 2006316433 A JP2006316433 A JP 2006316433A JP 5114044 B2 JP5114044 B2 JP 5114044B2
- Authority
- JP
- Japan
- Prior art keywords
- eyeball
- point
- region
- sphere
- shape
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images









Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B6/00—Apparatus or devices for radiation diagnosis; Apparatus or devices for radiation diagnosis combined with radiation therapy equipment
- A61B6/50—Apparatus or devices for radiation diagnosis; Apparatus or devices for radiation diagnosis combined with radiation therapy equipment specially adapted for specific body parts; specially adapted for specific clinical applications
- A61B6/506—Apparatus or devices for radiation diagnosis; Apparatus or devices for radiation diagnosis combined with radiation therapy equipment specially adapted for specific body parts; specially adapted for specific clinical applications for diagnosis of nerves
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/10—Segmentation; Edge detection
- G06T7/11—Region-based segmentation
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V40/00—Recognition of biometric, human-related or animal-related patterns in image or video data
- G06V40/10—Human or animal bodies, e.g. vehicle occupants or pedestrians; Body parts, e.g. hands
- G06V40/18—Eye characteristics, e.g. of the iris
- G06V40/19—Sensors therefor
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61N—ELECTROTHERAPY; MAGNETOTHERAPY; RADIATION THERAPY; ULTRASOUND THERAPY
- A61N5/00—Radiation therapy
- A61N5/10—X-ray therapy; Gamma-ray therapy; Particle-irradiation therapy
- A61N5/103—Treatment planning systems
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/10—Image acquisition modality
- G06T2207/10072—Tomographic images
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/10—Image acquisition modality
- G06T2207/10116—X-ray image
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/20—Special algorithmic details
- G06T2207/20036—Morphological image processing
- G06T2207/20044—Skeletonization; Medial axis transform
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/20—Special algorithmic details
- G06T2207/20092—Interactive image processing based on input by user
- G06T2207/20101—Interactive definition of point of interest, landmark or seed
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/30—Subject of image; Context of image processing
- G06T2207/30004—Biomedical image processing
- G06T2207/30041—Eye; Retina; Ophthalmic
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V10/00—Arrangements for image or video recognition or understanding
- G06V10/20—Image preprocessing
- G06V10/24—Aligning, centring, orientation detection or correction of the image
- G06V10/248—Aligning, centring, orientation detection or correction of the image by interactive preprocessing or interactive shape modelling, e.g. feature points assigned by a user
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V2201/00—Indexing scheme relating to image or video recognition or understanding
- G06V2201/03—Recognition of patterns in medical or anatomical images
Landscapes
- Engineering & Computer Science (AREA)
- Health & Medical Sciences (AREA)
- Physics & Mathematics (AREA)
- Life Sciences & Earth Sciences (AREA)
- Theoretical Computer Science (AREA)
- General Health & Medical Sciences (AREA)
- Medical Informatics (AREA)
- General Physics & Mathematics (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Radiology & Medical Imaging (AREA)
- Dentistry (AREA)
- Oral & Maxillofacial Surgery (AREA)
- Multimedia (AREA)
- Biophysics (AREA)
- High Energy & Nuclear Physics (AREA)
- Human Computer Interaction (AREA)
- Ophthalmology & Optometry (AREA)
- Optics & Photonics (AREA)
- Pathology (AREA)
- Neurology (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Molecular Biology (AREA)
- Surgery (AREA)
- Animal Behavior & Ethology (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Image Processing (AREA)
- Apparatus For Radiation Diagnosis (AREA)
- Image Analysis (AREA)
- Magnetic Resonance Imaging Apparatus (AREA)
Description
102 眼球
104 レンズ
106 視神経
108 視交叉
200 生物学構造の切り出し方法
300 生物学構造の切り出し方法
400 生物学構造の切り出し方法
500 生物学構造の切り出し方法
600 生物学構造の切り出し方法
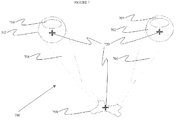
700 視覚器
702 眼球
704 レンズ
706 視神経
708 視交叉
720 シード点
802 球体
804 眼球の前側部分
806 レンズに対応する共通領域
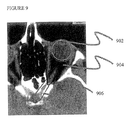
902 眼球
904 円錐部分
906 パイプ部分
1004 円錐部分
1008 パイプ部分
1102 モデル化視交叉
1200 自動切り出しシステム
1202 画像作成サブシステム
1204 通信リンク
1206 メモリ
1208 プロセッサ
1210 ユーザインタフェース
1212 ディスプレイ
1214 記憶装置
1216 画像処理サブシステム
Claims (9)
- 少なくとも1つの視覚器(100、700)を含む画像(図8〜11)を受け取ることが可能であり、さらに該少なくとも1つの視覚器(100、700)のうちの少なくとも1つに対応する少なくとも1つのシード点(702)を特定することが可能なプロセッサ(1208)を備える視覚器(100、700)の自動切り出しを実行するためのシステム(1200)であって、
該プロセッサは、
前記眼球(102、702)の中心点を特定し、
推定された半径を有する球を前記中心点に位置決めし、
前記眼球の内部に第1の円を配置し、
前記眼球の外部に第2の円を配置し、
前記第1及び第2の円の位置に基づいて適合度基準を計算し、
前記適合度基準が最小になるように前記第1及び第2の円の位置を移動し、
前記球の中心点又は半径を調整して、調整された球を形成し、
該調整された球に基づいて、前記少なくとも1つの視覚器(100、700)を切り出すように構成されている、システム(1200)。 - ユーザによる前記中心点の選択を可能にするユーザインタフェース(1210)を備える、請求項1に記載のシステム(1200)。
- 生物学的構造を切り出すための方法(200、300、400、500、600)であって、
前記眼球(102、702)の中心点を特定する工程と、
推定された半径を有する球を前記中心点に位置決めする工程と、
前記眼球の内部に第1の円を配置する工程と、
前記眼球の外部に第2の円を配置する工程と、
前記第1及び第2の円の位置に基づいて適合度基準を計算する工程と、
前記適合度基準が最小になるように前記第1及び第2の円の位置を移動する工程と、
前記球の中心点又は半径を調整して、調整された球を形成する工程と、
該調整された球に基づいて、前記少なくとも1つの視覚器(100、700)を自動で切り出す工程と、
を含む方法(200、300、400、500、600)。 - 患者の性別、年齢、体重、身長、病状のいずれかに基づいて、前記推定された半径を推定する段階を含む、請求項3に記載の方法(200、300、400、500、600)。
- 少なくとも1つの視覚器を自動で切り出す前記工程はさらに、
眼球(102、702)の前側部分(804)に対応するデータ部分を処理して処理済みの領域(806)を形成する工程と、
前記処理済み領域(806)の少なくとも一部分に対する重量点を決定する工程と、
前記少なくとも1つの形状(802、902、904、906、1002、1102)を前記重量点の中心に置いた状態で少なくとも1つのレンズ(104、704)を切り出す工程と、
を含む、請求項3または4に記載の方法(200、300、400、500、600)。 - 前記少なくとも1つのシード点(702)のうちの1つは視交叉(108、708)の一領域に対応する、請求項3乃至5のいずれかに記載の方法(200、300、400、500、600)。
- 少なくとも1つの前記視覚器(100、700)を自動で切り出す前記工程はさらに、
第1の前記少なくとも1つの形状(802、902、904、906、1002、1102)を視神経(106、706)の予測領域に沿って当てはめる工程と、
前記第1の前記少なくとも1つの形状(802、902、904、906、1002、1102)の一領域に対応するデータを処理し処理済みデータを形成する工程と、
前記処理済みデータの一区画に対応する少なくとも1つの重量点を決定する工程と、
前記少なくとも1つの重量点を中心とする第2の前記少なくとも1つの形状(802、902、904、906、1002、1102)を当てはめし、切り出し視神経(106、706)を形成する工程と、
を含む、請求項3乃至6のいずれかに記載の方法(200、300、400、500、600)。 - 前記第1の前記少なくとも1つの形状(802、902、904、906、1002、1102)は1つの円錐部分(904、1004)及び1つのパイプ部分(906、1008)を含む、請求項7に記載の方法(200、300、400、500、600)。
- 前記第2の前記少なくとも1つの形状(802、902、904、906、1002、1102)は少なくとも1つの楕円を含む、請求項7に記載の方法(200、300、400、500、600)。
Applications Claiming Priority (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US73969505P | 2005-11-23 | 2005-11-23 | |
| US60/739,695 | 2005-11-23 | ||
| US11/491,434 US20070116338A1 (en) | 2005-11-23 | 2006-07-21 | Methods and systems for automatic segmentation of biological structure |
| US11/491,434 | 2006-07-21 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2007144176A JP2007144176A (ja) | 2007-06-14 |
| JP2007144176A5 JP2007144176A5 (ja) | 2011-01-13 |
| JP5114044B2 true JP5114044B2 (ja) | 2013-01-09 |
Family
ID=38135961
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2006316433A Expired - Fee Related JP5114044B2 (ja) | 2005-11-23 | 2006-11-24 | 生物学的構造を有する画像を切り出す方法及びシステム |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US20070116338A1 (ja) |
| JP (1) | JP5114044B2 (ja) |
| DE (1) | DE102006057264A1 (ja) |
| NL (1) | NL1032928C2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3180979B2 (ja) | 1992-10-09 | 2001-07-03 | 日本化薬株式会社 | 樹脂組成物、ソルダーレジスト樹脂組成物及びその硬化物 |
Families Citing this family (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8379957B2 (en) * | 2006-01-12 | 2013-02-19 | Siemens Corporation | System and method for segmentation of anatomical structures in MRI volumes using graph cuts |
| DE102006059383A1 (de) * | 2006-12-15 | 2008-06-19 | Siemens Ag | Verfahren und Bildbearbeitungssystem zur Erzeugung von Ergebnisbildern eines Untersuchungsobjekts |
| GB2459225B (en) * | 2007-01-16 | 2011-07-20 | Simbionix Ltd | Preoperative surgical simulation |
| DE102008018701A1 (de) * | 2008-04-09 | 2009-10-15 | Carl Zeiss Meditec Ag | Verfahren zur automatisierten Detektion und Segmentierung der Papille in Fundusaufnahmen |
| DE102008020657A1 (de) * | 2008-04-24 | 2009-11-05 | Siemens Aktiengesellschaft | Verfahren zur Anzeige einer Position in einem Herzuntersuchungsbereich |
| US9042629B2 (en) * | 2008-05-14 | 2015-05-26 | Koninklijke Philips N.V. | Image classification based on image segmentation |
| US8463021B2 (en) | 2010-09-16 | 2013-06-11 | Indian Institute Of Technology Kanpur | Four dimensional reconstruction and characterization system |
| US8625889B2 (en) * | 2010-12-30 | 2014-01-07 | Samsung Electronics Co., Ltd. | System for food recognition method using portable devices having digital cameras |
| WO2013037702A1 (en) * | 2011-09-14 | 2013-03-21 | Siemens Aktiengesellschaft | Method and a system for medical imaging |
| US9265458B2 (en) | 2012-12-04 | 2016-02-23 | Sync-Think, Inc. | Application of smooth pursuit cognitive testing paradigms to clinical drug development |
| US9380976B2 (en) | 2013-03-11 | 2016-07-05 | Sync-Think, Inc. | Optical neuroinformatics |
| US10716536B2 (en) * | 2013-07-17 | 2020-07-21 | Tissue Differentiation Intelligence, Llc | Identifying anatomical structures |
| US11986341B1 (en) | 2016-05-26 | 2024-05-21 | Tissue Differentiation Intelligence, Llc | Methods for accessing spinal column using B-mode imaging to determine a trajectory without penetrating the the patient's anatomy |
| US11701086B1 (en) | 2016-06-21 | 2023-07-18 | Tissue Differentiation Intelligence, Llc | Methods and systems for improved nerve detection |
| US11861805B2 (en) * | 2021-09-22 | 2024-01-02 | Sony Group Corporation | Eyeball positioning for 3D head modeling |
| CN119379708A (zh) * | 2023-07-27 | 2025-01-28 | 上海美杰医疗科技有限公司 | 快速曲线演化形态学医学图像分割方法 |
Family Cites Families (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH08131403A (ja) * | 1994-11-09 | 1996-05-28 | Toshiba Medical Eng Co Ltd | 医用画像処理装置 |
| US5988862A (en) * | 1996-04-24 | 1999-11-23 | Cyra Technologies, Inc. | Integrated system for quickly and accurately imaging and modeling three dimensional objects |
| US6804683B1 (en) * | 1999-11-25 | 2004-10-12 | Olympus Corporation | Similar image retrieving apparatus, three-dimensional image database apparatus and method for constructing three-dimensional image database |
| JP2001155019A (ja) * | 1999-11-25 | 2001-06-08 | Olympus Optical Co Ltd | 類似画像検索装置 |
| US6630932B1 (en) * | 2000-02-11 | 2003-10-07 | Microsoft Corporation | Method and system for efficient simplification of tetrahedral meshes used in 3D volumetric representations |
| US6978039B2 (en) * | 2001-12-13 | 2005-12-20 | General Electric Company | Method and system for segmentation of medical images |
| US7006677B2 (en) * | 2002-04-15 | 2006-02-28 | General Electric Company | Semi-automatic segmentation algorithm for pet oncology images |
| US7844317B2 (en) * | 2003-11-26 | 2010-11-30 | General Electric Company | Method and system for estimating three-dimensional respiratory motion |
-
2006
- 2006-07-21 US US11/491,434 patent/US20070116338A1/en not_active Abandoned
- 2006-11-23 NL NL1032928A patent/NL1032928C2/nl not_active IP Right Cessation
- 2006-11-23 DE DE102006057264A patent/DE102006057264A1/de not_active Ceased
- 2006-11-24 JP JP2006316433A patent/JP5114044B2/ja not_active Expired - Fee Related
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3180979B2 (ja) | 1992-10-09 | 2001-07-03 | 日本化薬株式会社 | 樹脂組成物、ソルダーレジスト樹脂組成物及びその硬化物 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2007144176A (ja) | 2007-06-14 |
| NL1032928C2 (nl) | 2010-01-26 |
| NL1032928A1 (nl) | 2007-05-24 |
| US20070116338A1 (en) | 2007-05-24 |
| DE102006057264A1 (de) | 2007-07-05 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5114044B2 (ja) | 生物学的構造を有する画像を切り出す方法及びシステム | |
| US11430203B2 (en) | Computer-implemented method for registering low dimensional images with a high dimensional image, a method for training an aritificial neural network useful in finding landmarks in low dimensional images, a computer program and a system for registering low dimensional images with a high dimensional image | |
| US10460204B2 (en) | Method and system for improved hemodynamic computation in coronary arteries | |
| CN100553561C (zh) | 在ct血管造影术中分割结构的方法及设备 | |
| US20190021677A1 (en) | Methods and systems for classification and assessment using machine learning | |
| CN107004305B (zh) | 与医学图像编辑相关的设备、系统、方法、装置和计算机可读介质 | |
| US9424680B2 (en) | Image data reformatting | |
| US11523744B2 (en) | Interaction monitoring of non-invasive imaging based FFR | |
| JP7055872B2 (ja) | 二次元/三次元画像コレジストレーションのためにコンピュータによって実現される情報処理方法、プログラム、医用画像分析システム、および、放射線療法治療システム | |
| JP6397846B2 (ja) | 高度な構造生成および編集のためのメカニズム | |
| US20240394886A1 (en) | Methods relating to survey scanning in diagnostic medical imaging | |
| JP7537432B2 (ja) | 画像ベースの装置追跡 | |
| US20080084415A1 (en) | Orientation of 3-dimensional displays as a function of the regions to be examined | |
| JP2007111533A (ja) | コンピュータ断層撮影ボリュームデータにおける脊髄検出の方法およびシステム | |
| JP6827707B2 (ja) | 情報処理装置および情報処理システム | |
| EP1814050A2 (en) | Methods and systems for facilitating planning of surgical procedures | |
| JP7738452B2 (ja) | 医用画像処理装置および方法 | |
| US20240153178A1 (en) | Method and system to generate modified x-ray images | |
| WO2025078303A1 (en) | Annotating medical images | |
| Voormolen et al. | Intra-temporal facial nerve centerline segmentation for navigated temporal bone surgery | |
| CN120390942A (zh) | 用于辅助用户基于图像地规划和执行外科手术的装置 | |
| CN120959893A (zh) | 术前ct图像指导术中经食道超声图像角度获取方法及装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20091124 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20091124 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20091124 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20101117 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20120302 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120321 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20120418 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20120423 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120712 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120731 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20120925 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20121015 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20151019 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |