JP5115301B2 - 作業車両の無段変速機構操作装置 - Google Patents
作業車両の無段変速機構操作装置 Download PDFInfo
- Publication number
- JP5115301B2 JP5115301B2 JP2008112394A JP2008112394A JP5115301B2 JP 5115301 B2 JP5115301 B2 JP 5115301B2 JP 2008112394 A JP2008112394 A JP 2008112394A JP 2008112394 A JP2008112394 A JP 2008112394A JP 5115301 B2 JP5115301 B2 JP 5115301B2
- Authority
- JP
- Japan
- Prior art keywords
- pedal
- floor
- continuously variable
- reverse
- hydraulic cylinder
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 230000005540 biological transmission Effects 0.000 title claims description 66
- 230000033001 locomotion Effects 0.000 claims description 14
- 238000001514 detection method Methods 0.000 claims description 8
- 230000007935 neutral effect Effects 0.000 description 7
- 238000010586 diagram Methods 0.000 description 3
- 238000004519 manufacturing process Methods 0.000 description 3
- 230000008602 contraction Effects 0.000 description 2
- 230000000994 depressogenic effect Effects 0.000 description 2
- 238000012423 maintenance Methods 0.000 description 2
- 230000003014 reinforcing effect Effects 0.000 description 2
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 2
- 230000000694 effects Effects 0.000 description 1
- 230000002706 hydrostatic effect Effects 0.000 description 1
- 238000002955 isolation Methods 0.000 description 1
- 230000006798 recombination Effects 0.000 description 1
- 238000005215 recombination Methods 0.000 description 1
- 230000002787 reinforcement Effects 0.000 description 1
Images








Landscapes
- Arrangement Or Mounting Of Control Devices For Change-Speed Gearing (AREA)
- Gear-Shifting Mechanisms (AREA)
Description
ぺダルセンサ(3s)の検出値に基づき電磁式油圧制御弁(6b)を制御して油圧シリンダ(6a)を動かし、油圧シリンダ(6a)の動きで前記無段変速機構(8)のトラニオン軸(8a)を操作するコントローラ(5)を設け、
前記ミッションケース(11)にマウントブラケット(20)を支持して設け、該マウントブラケット(20)に前記フロア(F)の前側部を支持すると共に、マウントブラケット(20)に前記油圧シリンダ(6a)と電磁式油圧制御弁(6b)を支持する構成としたことを特徴とする作業車両の無段変速機構操作装置。
ぺダルセンサ(3s)の検出値に基づき電磁式油圧制御弁(6b)を制御して油圧シリンダ(6a)を動かし、この油圧シリンダ(6a)の動きで前記無段変速機構(8)のトラニオン軸(8a)を操作する。
また、マウントブラケット(20)でフロア(F)の前側部を支持し、同じマウントブラケット(20)に前記油圧シリンダ(6a)と電磁式油圧制御弁(6b)を支持する構成としたので、油圧シリンダ(6a)と電磁式油圧制御弁(6b)取付用の補強部材が不要となり、コンパクトな構成とすることができる。そして、コストの低減を図りながら部品点数を少なくし生産の合理化を図ることができる。
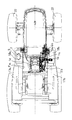
無段変速式作業車両の一例であるトラクタは、操縦部のフロア位置に無段変速機構を内設した変速伝動装置1を搭載し、その側方位置に前進ぺダル1a及び後進ぺダル1bを配置する。変速伝動装置1は、エンジンから伝動される走行動力を無段階に変速して走行車輪に伝えて前後進走行車速を調節し、この変速伝動装置1をそれぞれのぺダル踏み込み操作に応じて変速制御するための伝動速度制御装置を設けている。
ミッションケース11の上側にはフロアFを配設し、このフロアFの前側左右中央部からハンドルポスト13を立ち上げ、ハンドルポスト13の上端部にステアリングハンドル14を取り付けると共に、ハンドルポスト13の上面部に操作パネル15を設け、フロアFの後側部にはシート16を設けている。
また、無段変速機構8と、前進ぺダル1a,後進ぺダル1bに連係している前進ロッド2a,後進ロッド2bと、これら前進ロッド2a,後進ロッド2bの進退動作を共通の回動軸3回りに互いに異なる方向の回動動作に変換するクランクレバー3a,3bからなるぺダルリンクユニットを、ミッションケース11の右側方に配置し、前進ぺダル1a,後進ぺダル1bを平面視で無段変速機構8の右外側寄りに配置している。
1b 後進ぺダル
2a 前進ロッド
2b 後進ロッド
3a 前クランクレバー
3b 後クランクレバー
3s ぺダルセンサ
5 コントローラ
6a 油圧シリンダ
6b 電磁式油圧制御弁
8 無段変速機構
8a トラニオン軸
11 ミッションケース
12 ブラケット
20 マウントブラケット
F フロア
Claims (2)
- 無段変速機構(8)を内装しているミッションケース(11)の上側にはフロア(F)を配設し、前記フロア(F)の左右一側下面に取り付けたブラケット(12)に前記無段変速機構(8)操作用の前進ペダル(1a)及び後進ペダル(1b)を左右方向の共通の支軸(1c)で左右並設状態に軸支し、前記前進ペダル(1a)及び後進ぺダル(1b)の踏込み操作部を前記フロア(F)の上方に突出して配置し、且つ、前記ブラケット(12)よりも平面視で左右外側寄りにオフセットした位置に配置し、前記フロア(F)のミッションケース(11)に近い中央寄りに支持したブラケット(12)には、前記前進ペダル(1a),後進ぺダル(1b)、前進ロッド(2a),後進ロッド(2b)、前後クランクレバー(3a,3b)、及び前記前後進ペダル(1a,1b)の踏込み操作量を検出するぺダルセンサ(3s)からなるぺダルリンクユニットを取り付け、
ぺダルセンサ(3s)の検出値に基づき電磁式油圧制御弁(6b)を制御して油圧シリンダ(6a)を動かし、油圧シリンダ(6a)の動きで前記無段変速機構(8)のトラニオン軸(8a)を操作するコントローラ(5)を設け、
前記ミッションケース(11)にマウントブラケット(20)を支持して設け、該マウントブラケット(20)に前記フロア(F)の前側部を支持すると共に、マウントブラケット(20)に前記油圧シリンダ(6a)と電磁式油圧制御弁(6b)を支持する構成としたことを特徴とする作業車両の無段変速機構操作装置。 - 前記ミッションケース(11)の左側方に前記コントローラ(5)を配置し、前記前進ペダル(1a),後進ぺダル(1b)及び油圧シリンダ(6a)の後方で、且つフロア(F)の下方に、前記ぺダルセンサ(3s)を配置したことを特徴とする請求項1記載の作業車両の無段変速機構操作装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008112394A JP5115301B2 (ja) | 2008-04-23 | 2008-04-23 | 作業車両の無段変速機構操作装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008112394A JP5115301B2 (ja) | 2008-04-23 | 2008-04-23 | 作業車両の無段変速機構操作装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2009262668A JP2009262668A (ja) | 2009-11-12 |
| JP5115301B2 true JP5115301B2 (ja) | 2013-01-09 |
Family
ID=41389091
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008112394A Expired - Fee Related JP5115301B2 (ja) | 2008-04-23 | 2008-04-23 | 作業車両の無段変速機構操作装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5115301B2 (ja) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102494121B (zh) * | 2011-12-27 | 2014-09-17 | 南通安捷机械有限公司 | 液压搬运车排挡器 |
| JP5860380B2 (ja) | 2012-10-30 | 2016-02-16 | ヤンマー株式会社 | 変速操作機構及び作業車両 |
| JP2020098032A (ja) | 2020-02-12 | 2020-06-25 | ヤンマーパワーテクノロジー株式会社 | 作業車両 |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006240324A (ja) * | 2005-02-28 | 2006-09-14 | Iseki & Co Ltd | 作業車両 |
| JP4749967B2 (ja) * | 2006-07-25 | 2011-08-17 | ヤンマー株式会社 | 作業車両の走行操作装置 |
| JP4683569B2 (ja) * | 2007-01-29 | 2011-05-18 | ヤンマー株式会社 | ペダルユニット |
-
2008
- 2008-04-23 JP JP2008112394A patent/JP5115301B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2009262668A (ja) | 2009-11-12 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US9309967B2 (en) | Gearshift mechanism and working vehicle | |
| WO2004098264A1 (ja) | モアトラクタ | |
| JP5115301B2 (ja) | 作業車両の無段変速機構操作装置 | |
| EP1923608B1 (en) | Working vehicle | |
| JP5569188B2 (ja) | 作業車両の無段変速操作装置 | |
| JP2011174536A (ja) | 作業車両 | |
| JP5141217B2 (ja) | 作業車両 | |
| JP2009083525A (ja) | 作業車両 | |
| US12270181B2 (en) | Work machine, shaft sealing structure, and work machine including the sealing structure | |
| JP2011031661A (ja) | 作業車両 | |
| JP2012116290A (ja) | 作業車両の駐車ブレーキ操作装置 | |
| JP5474377B2 (ja) | 作業車両 | |
| JP2021030981A (ja) | 作業車両の走行操作装置 | |
| JP2010274729A (ja) | 作業車両 | |
| JP2012072687A (ja) | エアクリーナ | |
| JP2008037317A (ja) | 走行車両 | |
| JPH11325240A (ja) | 作業車の走行変速装置 | |
| JP4592296B2 (ja) | 作業車輛の走行操作装置 | |
| JP4826285B2 (ja) | 作業車両における変速操作装置 | |
| JP5596596B2 (ja) | 車両の変速機構 | |
| JP2010254138A (ja) | 作業車両のステアリングハンドル支持装置 | |
| JP2004028309A (ja) | 動力車両 | |
| JP2015123760A (ja) | 作業車 | |
| JP2010127308A (ja) | 走行車両 | |
| JP3106432B2 (ja) | 乗用田植機 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110421 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20120514 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120522 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120723 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20120918 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20121001 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 Ref document number: 5115301 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20151026 Year of fee payment: 3 |
|
| LAPS | Cancellation because of no payment of annual fees |