JP5116620B2 - 電動機の駆動装置並びに冷凍空調装置 - Google Patents
電動機の駆動装置並びに冷凍空調装置 Download PDFInfo
- Publication number
- JP5116620B2 JP5116620B2 JP2008233796A JP2008233796A JP5116620B2 JP 5116620 B2 JP5116620 B2 JP 5116620B2 JP 2008233796 A JP2008233796 A JP 2008233796A JP 2008233796 A JP2008233796 A JP 2008233796A JP 5116620 B2 JP5116620 B2 JP 5116620B2
- Authority
- JP
- Japan
- Prior art keywords
- voltage
- axis
- command value
- power consumption
- electric motor
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images















Landscapes
- Control Of Ac Motors In General (AREA)
Description
また、『モータ回転角周波数と、トルク指令と、モータ回転子に同期して回転するdq軸直交座標で表わしたd軸電圧およびq軸電圧と、d軸電流およびq軸電流とを入力として、インバータ出力有効電力指令とインバータ出力有効電力とを演算し、かつ当該演算した有効電力が有効電力指令に追従するような電流位相補正値をd軸電流指令およびq軸電流指令演算の補正値として演算して出力する有効電力制御手段を備えて成る』というものもある(特許文献2)。
さらに、『電気車の速度情報および電動機に供給する電流指令ならびに電動機の電流検出値から得たインバータ電圧指令と電動機に供給する電流指令により電動機の消費電力を求める電力演算装置と、フィルタコンデンサ電圧の検出装置と、電力演算装置の求めた電動機の消費電力とフィルタコンデンサ電圧の目標値とフィルタコンデンサ電圧の検出値を用いてフィルタコンデンサ電圧の制御を行う電圧制御装置を有する』というものもある(特許文献3)。
また、上記特許文献2に開示されている従来技術においても、上記特許文献1と同様に過変調領域において、正確な電力を求めることができず、精度良く有効電力制御ができないという課題がある。
さらに、上記特許文献3に開示されている従来技術においても、上記特許文献1及び上記特許文献2と同様に過変調領域において求めた消費電力に誤差が生じ精度良く電圧制御ができないという課題がある。
さらに、上記特許文献4に開示されている従来技術では、過変調領域の運転が可能であるが、この過変調領域において電圧指令値と電動機に印加される電圧が一致せず、電圧指令値と電流から消費電力を正確に推定することが困難であるという課題がある。
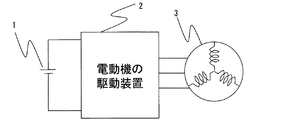
図1は、本発明の実施の形態1に係る電動機の駆動装置の構成を示す図である。
図1において、1は直流電源、2は本実施の形態1に係る電動機の駆動装置、3は電動機である。
直流電圧検出手段7は、インバータ主回路5に印加される直流電源1の電圧を検出し、インバータ制御手段8に出力する。
インバータ制御手段8は、電流検出手段6、直流電圧手段7の出力に基づいて駆動信号を出力し、インバータ主回路5内のスイッチング素子のオン・オフを制御する。

なお、上記の例では回転数指令ω*、およびd軸電流指令値Id*に基づいて電圧指令値Vd*、Vq*を出力したが、巻線抵抗、巻線インダクタンス、誘起電圧定数等のモータパラメータやトルク指令に基づいて電圧指令値Vd*、Vq*を出力してもよい。
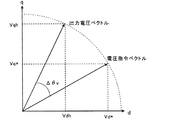
電動機3の消費電力つまり有効電力は一般に電動機3に印加される電圧の実効値|V|と、流れる電流の実効値|I|と電圧と電流の位相差φを用いて式(3)で表される。
また、消費電力が最小となることにより、発熱等も抑えられるため、熱による経年劣化も少なく、信頼性の高い電動機の駆動装置を提供できるだけでなく、放熱板等も小型化可能となり、低コスト化も図れる。
実施の形態1では、過変調領域において精度良く消費電力を求める方法について説明した。
本発明の実施の形態2では、出力電圧が飽和する過変調領域において電圧指令と出力電圧が1対1で出力されるように変調率Vkを補正した場合に、精度良く消費電力を求める方法について説明する。
実施の形態2は、変調率補正手段18を備える以外は実施の形態1と何ら変わりはないため、実施の形態1と同じ符号を付して説明を省略する。
実施の形態1および実施の形態2ではデッドタイムによる影響が無い場合の、消費電力の演算方法について説明した。
実施の形態3においては、インバータ主回路を駆動する際に、上下スイッチング素子の短絡防止のために用いる短絡防止時間(デッドタイム)による影響を低減させる方法について説明する。
実施の形態3は、デッドタイム補正手段21を備える以外は実施の形態1と何ら変わりはないため、実施の形態1と同じ符号を付して説明を省略する。
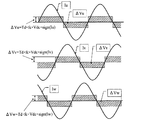
インバータ制御手段8は、通常マイコン等の演算装置にて、ある制御周期毎に電流を検出した後、電圧指令値を演算し、算出された電圧指令値を電圧として電動機に印加する離散的な制御を実施している関係上、図17に示すように電圧指令と実際の出力電圧の位相に誤差(遅れ)が生じる。また、変調率Vkが1を超える過変調領域においては、出力電圧が制限されるため、図18に示すように出力電圧が、台形状となり変調率が無限大となると矩形波状となる。そのため、電圧指令に高調波成分が重畳し、同様に電圧指令と実際の出力電圧の位相に誤差が生じる。
実施の形態4においては、電圧指令と出力電圧の位相に誤差が生じた場合の、補正方法について説明する。
実施の形態4は、電圧補正手段23を備える以外は実施の形態1と何ら変わりはないため、実施の形態1と同じ符号を付して説明を省略する。
以上の実施の形態1〜4で説明した電動機の駆動装置の活用例として、空気調和機や冷蔵庫などの冷凍空調装置などが挙げられる。
Claims (16)
- 直流電圧を交流電圧に変換して電動機に印加するインバータと、
前記電動機に流れる相電流を検出する電流検出手段と、
前記インバータに印加される直流電圧を検出する直流電圧検出手段と、
前記インバータが電動機に印加する電圧を制御する制御手段と、
位相誤差記憶手段と、
を備え、
前記制御手段は、
前記電流検出手段が検出した相電流を直交2軸座標上の電流としてd軸電流Id及びq軸電流Iqに変換する座標変換手段と、
前記座標変換手段の出力と所定の基準値に基づき、前記電動機に印加する前記直交2軸座標上の電圧の指令値としてd軸電圧指令値Vd*及びq軸電圧指令値Vq*を出力する電圧指令値演算手段と、
前記直交2軸座標上の電圧指令値であるd軸電圧指令値Vd*及びq軸電圧指令値Vq*と、前記直流電圧とにより変調率を求める変調率演算手段と、
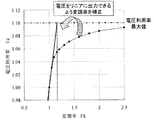
前記変調率演算手段の出力である前記変調率とその前記変調率に対する出力電圧の割合である電圧利用率を予め求めておき、前記変調率と前記電圧利用率との対応関係を記憶させ、前記電圧利用率を求めるときには、予め記憶させた前記対応関係に基づいて前記変調率から前記電圧利用率を求める電圧利用率演算手段と、
前記直交2軸座標上の電圧指令値であるd軸電圧指令値Vd*及びq軸電圧指令値Vq*と前記直交2軸座標上の電流であるd軸電流Id及びq軸電流Iqとの内積を求め、その求めた内積に対して、前記電圧利用率を乗算すると共に前記変調率を除算することにより、前記電動機の消費電力を求める消費電力演算手段と、
を備え、
前記位相誤差記憶手段は、
前記電動機に印加される電圧と前記電圧の指令値との位相誤差と、前記制御手段が有する変調率演算手段または前記制御手段が有する変調率補正手段の出力との関係を予め記憶し、
前記消費電力演算手段は、前記電動機の消費電力を求める際に前記位相誤差記憶手段に記憶された位相誤差に基づいて前記電圧指令値演算手段の出力を補正する
ことを特徴とする電動機の駆動装置。 - 直流電圧を交流電圧に変換して電動機に印加するインバータと、
前記電動機に流れる相電流を検出する電流検出手段と、
前記インバータに印加される直流電圧を検出する直流電圧検出手段と、
前記インバータが電動機に印加する電圧を制御する制御手段と、
位相誤差記憶手段と、
を備え、
前記制御手段は、
前記電流検出手段が検出した相電流を直交2軸座標上の電流としてd軸電流Id及びq軸電流Iqに変換する座標変換手段と、
前記座標変換手段の出力と所定の基準値に基づき、前記電動機に印加する前記直交2軸座標上の電圧の指令値としてd軸電圧指令値Vd*及びq軸電圧指令値Vq*を出力する電圧指令値演算手段と、
前記直交2軸座標上の電圧指令値であるd軸電圧指令値Vd*及びq軸電圧指令値Vq*と、前記直流電圧とにより変調率を求める変調率演算手段と、
前記変調率演算手段の出力である前記変調率とその前記変調率に対する出力電圧の割合である電圧利用率を予め求めておき、前記変調率と前記電圧利用率との対応関係を記憶させ、前記電圧利用率を求めるときには、予め記憶させた前記対応関係に基づいて前記変調率から前記電圧利用率を求める電圧利用率演算手段と、
前記直交2軸座標上の電圧指令値であるd軸電圧指令値Vd*及びq軸電圧指令値Vq*と前記直交2軸座標上の電流であるd軸電流Id及びq軸電流Iqとの内積を求め、その求めた内積に対して、前記電圧利用率を乗算すると共に前記変調率を除算することにより、前記電動機の消費電力を求める消費電力演算手段と、
を備え、
前記位相誤差記憶手段は、
前記電動機に印加される電圧と前記電圧の指令値との位相誤差と、前記制御手段が有する変調率演算手段または前記制御手段が有する変調率補正手段の出力との関係を予め記憶し、
前記消費電力演算手段は、前記電動機の消費電力を求める際に前記位相誤差記憶手段に記憶された位相誤差に基づいて前記電圧指令値演算手段の出力を補正し、
前記消費電力演算手段は、前記変調率が1を超えた場合に、前記電圧指令値演算手段の出力を前記変調率で正規化し、更にこの正規化によって得られた結果に前記電圧利用率演算手段の出力を乗算して新たな電圧指令値に変換し、この変換後の電圧指令値に基づいて消費電力を演算することを特徴とする電動機の駆動装置。 - 直流電圧を交流電圧に変換して電動機に印加するインバータと、
前記電動機に流れる相電流を検出する電流検出手段と、
前記インバータに印加される直流電圧を検出する直流電圧検出手段と、
前記インバータが電動機に印加する電圧を制御する制御手段と、
位相誤差記憶手段と、
を備え、
前記制御手段は、
前記電流検出手段が検出した相電流を直交2軸座標上の電流としてd軸電流Id及びq軸電流Iqに変換する座標変換手段と、
前記座標変換手段の出力と所定の基準値に基づき、前記電動機に印加する前記直交2軸座標上の電圧の指令値としてd軸電圧指令値Vd*及びq軸電圧指令値Vq*を出力する電圧指令値演算手段と、
前記直交2軸座標上の電圧指令値であるd軸電圧指令値Vd*及びq軸電圧指令値Vq*と、前記直流電圧とにより変調率を求める変調率演算手段と、
前記変調率演算手段によって求められた変調率を補正して出力する変調率補正手段と、
前記変調率補正手段の出力である前記変調率とその前記変調率に対する出力電圧の割合である電圧利用率を予め求めておき、前記変調率と前記電圧利用率との対応関係を記憶させ、前記電圧利用率を求めるときには、予め記憶させた前記対応関係に基づいて前記変調率から前記電圧利用率を求める電圧利用率演算手段と、
前記直交2軸座標上の電圧指令値であるd軸電圧指令値Vd*及びq軸電圧指令値Vq*と前記直交2軸座標上の電流であるd軸電流Id及びq軸電流Iqとの内積を求め、その求めた内積に対して、前記電圧利用率を乗算すると共に前記変調率を除算することにより、前記電動機および前記インバータの消費電力を求める消費電力演算手段と、
を備え、
前記位相誤差記憶手段は、
前記電動機に印加される電圧と前記電圧の指令値との位相誤差と、前記制御手段が有する変調率演算手段または前記制御手段が有する変調率補正手段の出力との関係を予め記憶し、
前記消費電力演算手段は、前記電動機の消費電力を求める際に前記位相誤差記憶手段に記憶された位相誤差に基づいて前記電圧指令値演算手段の出力を補正する
ことを特徴とする電動機の駆動装置。 - 前記変調率補正手段は、前記変調率が1を超えた場合に、前記変調率を、前記変調率に対する電圧利用率の関数の逆関数により補正することを特徴とする請求項3に記載の電動機の駆動装置。
- 前記所定の基準値は巻線抵抗、巻線インダクタンス、誘起電圧定数等のモータパラメータ、トルク指令、回転数指令、およびd軸電流指令値の少なくともいずれかであることを特徴とする請求項1〜請求項4のいずれかに記載の電動機の駆動装置。
- 前記消費電力演算手段は、前記変調率演算手段の出力が1以下の場合には、前記直交2軸座標系の電流及び前記直交2軸座標系の電圧により、前記電動機の消費電力を求めることを特徴とする請求項1〜請求項5のいずれかに記載の電動機の駆動装置。
- 前記電動機に印加される電圧と、前記電圧の指令値との、前記インバータのデッドタイムにより生じる誤差を推定するデッドタイム電圧誤差推定手段を備え、
前記制御手段は、前記デッドタイム電圧誤差推定手段の出力に基づいて前記電圧指令値演算手段の出力を補正することを特徴とする請求項1〜請求項6のいずれかに記載の電動機の駆動装置。 - 前記制御手段は、前記電動機に印加される電圧と、前記電圧の指令値との、前記インバータのデッドタイムにより生じる誤差を前記電流検出手段が検出した相電流に基づいて補正するデッドタイム補正手段を備えたことを特徴とする請求項1〜請求項7のいずれかに記載の電動機の駆動装置。
- 前記制御手段は、前記電流検出手段が検出した相電流、前記直流電圧検出手段が検出した直流電圧、前記インバータのキャリア周波数及び前記インバータのデッドタイムの少なくともいずれかによって前記誤差を演算することを特徴とする請求項7または請求項8に記載の電動機の駆動装置。
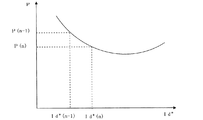
- 前記制御手段は、前記消費電力演算手段の出力が最小電力となるよう前記直交2軸座標上のd軸電流の指令値を制御することを特徴とする請求項1〜請求項9のいずれかに記載の電動機の駆動装置。
- 前記制御手段は、前記消費電力演算手段の出力に基づき前記電動機の過負荷状態を検出し、前記電動機が過負荷状態に陥ったことを検出すると、前記電動機の回転速度を低下させることを特徴とする請求項1〜請求項10のいずれかに記載の電動機の駆動装置。
- 前記制御手段は、前記消費電力演算手段の出力に基づき、外部の報知手段に消費電力に応じた表示および報知出力を行うことを特徴とする請求項1〜請求項11のいずれかに記載の電動機の駆動装置。
- 前記消費電力演算手段の出力に基づき、前記電動機の脱調状態を検出する脱調検出手段を備え、
前記制御手段は、前記脱調検出手段が前記電動機の脱調状態を検出すると、前記電動機を再起動することを特徴とする請求項1〜請求項11のいずれかに記載の電動機の駆動装置。 - 請求項1〜請求項12のいずれかに記載の電動機の駆動装置と、この駆動装置からの情報に基づき表示などの報知を行う報知手段とを備えたことを特徴とする冷凍空調装置。
- 請求項13に記載の電動機の駆動装置を備えたことを特徴とする冷凍空調装置。
- 前記消費電力演算手段の出力に基づき、料金を求める料金演算手段を備えたことを特徴とする請求項14または請求項15に記載の冷凍空調装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008233796A JP5116620B2 (ja) | 2008-09-11 | 2008-09-11 | 電動機の駆動装置並びに冷凍空調装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008233796A JP5116620B2 (ja) | 2008-09-11 | 2008-09-11 | 電動機の駆動装置並びに冷凍空調装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010068662A JP2010068662A (ja) | 2010-03-25 |
| JP5116620B2 true JP5116620B2 (ja) | 2013-01-09 |
Family
ID=42193748
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008233796A Expired - Fee Related JP5116620B2 (ja) | 2008-09-11 | 2008-09-11 | 電動機の駆動装置並びに冷凍空調装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5116620B2 (ja) |
Families Citing this family (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5171925B2 (ja) * | 2010-11-08 | 2013-03-27 | 三菱電機株式会社 | Pwmインバータ装置 |
| KR101609527B1 (ko) | 2013-08-12 | 2016-04-05 | 미쓰비시덴키 가부시키가이샤 | 모터 제어 장치 |
| JP5983636B2 (ja) * | 2014-01-10 | 2016-09-06 | ダイキン工業株式会社 | 電動機の制御装置 |
| WO2017199376A1 (ja) * | 2016-05-18 | 2017-11-23 | 三菱電機株式会社 | 空気調和機 |
| CN109496190B (zh) * | 2016-07-20 | 2020-01-21 | 日本精工株式会社 | 电动助力转向装置 |
| US10494016B2 (en) * | 2016-07-20 | 2019-12-03 | Nsk Ltd. | Electric power steering apparatus |
| JP6667407B2 (ja) * | 2016-09-12 | 2020-03-18 | ルネサスエレクトロニクス株式会社 | 制御装置 |
| JP6719162B2 (ja) * | 2017-06-28 | 2020-07-08 | 東芝三菱電機産業システム株式会社 | 多相電動機駆動装置 |
| US11146196B2 (en) * | 2018-03-16 | 2021-10-12 | Nissan Motor Co., Ltd. | Electric machine control method and electric machine control device |
| KR102109575B1 (ko) * | 2018-05-31 | 2020-05-12 | 엘에스일렉트릭(주) | 인버터 제어장치 |
| WO2025069181A1 (ja) * | 2023-09-26 | 2025-04-03 | 三菱電機株式会社 | 電力変換装置、電動機駆動装置及び冷凍サイクル適用機器 |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3669831B2 (ja) * | 1998-01-14 | 2005-07-13 | 株式会社荏原製作所 | インバータ装置 |
| JP3951075B2 (ja) * | 1998-02-13 | 2007-08-01 | 株式会社安川電機 | 電動機の制御方法及び装置 |
| JP3565124B2 (ja) * | 2000-01-12 | 2004-09-15 | トヨタ自動車株式会社 | 同期モータの脱調を判定する装置および方法 |
| JP3644391B2 (ja) * | 2001-02-15 | 2005-04-27 | 三菱電機株式会社 | インバータ装置、圧縮機制御装置、冷凍・空調装置の制御装置、モータの制御方法、圧縮機、冷凍・空調装置 |
| JP4135134B2 (ja) * | 2002-04-15 | 2008-08-20 | 日産自動車株式会社 | モータ制御装置 |
| JP2006191721A (ja) * | 2005-01-05 | 2006-07-20 | Yaskawa Electric Corp | モータ制御装置とその制御方法 |
| JP4417323B2 (ja) * | 2005-11-18 | 2010-02-17 | 三菱電機株式会社 | モータ制御装置 |
| JP2007282367A (ja) * | 2006-04-06 | 2007-10-25 | Matsushita Electric Ind Co Ltd | モータ駆動制御装置 |
| JP2007306694A (ja) * | 2006-05-10 | 2007-11-22 | Yaskawa Electric Corp | 誘導電動機のインバータ制御装置 |
-
2008
- 2008-09-11 JP JP2008233796A patent/JP5116620B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2010068662A (ja) | 2010-03-25 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4964209B2 (ja) | 電動機の駆動装置並びに冷凍空調装置 | |
| JP5116620B2 (ja) | 電動機の駆動装置並びに冷凍空調装置 | |
| JP4053968B2 (ja) | 同期電動機駆動装置及び冷凍冷蔵庫及び空気調和機 | |
| JP5222640B2 (ja) | 冷凍装置 | |
| JP6621356B2 (ja) | 電力変換装置、モータ駆動装置及びそれを用いた冷凍機器 | |
| JP3644391B2 (ja) | インバータ装置、圧縮機制御装置、冷凍・空調装置の制御装置、モータの制御方法、圧縮機、冷凍・空調装置 | |
| JP2015128355A (ja) | モータ制御装置 | |
| KR101514391B1 (ko) | 벡터 제어 장치, 및 그것을 사용한 모터 제어 장치, 공조기 | |
| WO2015129590A1 (ja) | 過給機及び船舶 | |
| JP5635032B2 (ja) | 同期モータの駆動装置、および、これを用いた送風装置 | |
| JP6463966B2 (ja) | モータ駆動装置およびモータ駆動用モジュール並びに冷凍機器 | |
| TWI355477B (ja) | ||
| JP4804496B2 (ja) | 電動機の駆動装置、空気調和機、洗濯機、洗濯乾燥機、冷蔵庫、換気扇、ヒートポンプ給湯器 | |
| KR102580148B1 (ko) | 모터 구동 장치 및 냉동 기기 | |
| JP6309173B2 (ja) | モータ駆動装置ならびにモータ駆動装置を用いたヒートポンプ装置、冷凍空調装置および送風装置 | |
| JP5078925B2 (ja) | 電動機の駆動装置並びに機器 | |
| JP2010068581A (ja) | 電動機駆動装置 | |
| JP6005429B2 (ja) | モータの制御装置および制御方法 | |
| JP2004040861A (ja) | モータの駆動装置 | |
| JP2009296722A (ja) | モータ制御装置、モータ制御方法およびエアコンディショナ | |
| JP2020139461A (ja) | 電動圧縮機 | |
| JP6490540B2 (ja) | 回転位置検出装置,空気調和機及び回転位置検出方法 | |
| WO2023095311A1 (ja) | 電力変換装置、電動機駆動装置及び冷凍サイクル適用機器 | |
| JP2011147306A (ja) | 電動機の制御回路、及びその制御回路を用いた空気調和機 | |
| WO2023105689A1 (ja) | 電力変換装置、電動機駆動装置及び冷凍サイクル適用機器 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20110622 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110628 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110822 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20120228 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120508 |
|
| A911 | Transfer to examiner for re-examination before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20120515 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120807 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120829 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20121009 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20121016 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5116620 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20151026 Year of fee payment: 3 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |