JP5123009B2 - ブラシレスモータ - Google Patents
ブラシレスモータ Download PDFInfo
- Publication number
- JP5123009B2 JP5123009B2 JP2008054774A JP2008054774A JP5123009B2 JP 5123009 B2 JP5123009 B2 JP 5123009B2 JP 2008054774 A JP2008054774 A JP 2008054774A JP 2008054774 A JP2008054774 A JP 2008054774A JP 5123009 B2 JP5123009 B2 JP 5123009B2
- Authority
- JP
- Japan
- Prior art keywords
- skew
- brushless motor
- angle
- rotor
- magnet
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images








Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K1/00—Details of the magnetic circuit
- H02K1/06—Details of the magnetic circuit characterised by the shape, form or construction
- H02K1/22—Rotating parts of the magnetic circuit
- H02K1/27—Rotor cores with permanent magnets
- H02K1/2706—Inner rotors
- H02K1/272—Inner rotors the magnetisation axis of the magnets being perpendicular to the rotor axis
- H02K1/274—Inner rotors the magnetisation axis of the magnets being perpendicular to the rotor axis the rotor consisting of two or more circumferentially positioned magnets
- H02K1/2753—Inner rotors the magnetisation axis of the magnets being perpendicular to the rotor axis the rotor consisting of two or more circumferentially positioned magnets the rotor consisting of magnets or groups of magnets arranged with alternating polarity
- H02K1/278—Surface mounted magnets; Inset magnets
- H02K1/2781—Magnets shaped to vary the mechanical air gap between the magnets and the stator
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K29/00—Motors or generators having non-mechanical commutating devices, e.g. discharge tubes or semiconductor devices
- H02K29/03—Motors or generators having non-mechanical commutating devices, e.g. discharge tubes or semiconductor devices with a magnetic circuit specially adapted for avoiding torque ripples or self-starting problems
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K2201/00—Specific aspects not provided for in the other groups of this subclass relating to the magnetic circuits
- H02K2201/06—Magnetic cores, or permanent magnets characterised by their skew
Landscapes
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Permanent Field Magnets Of Synchronous Machinery (AREA)
- Brushless Motors (AREA)
Description
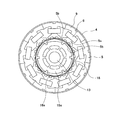
2 ステータ
3 ロータ
4 ケース
5 ステータコア
5a ティース
5b 溝
6 コイル
6a 端部
7 バスバーユニット
8 ブラケット
9 分割コア
11 インシュレータ
12 給電用端子
13 ロータシャフト
14a,14b ベアリング
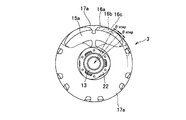
15a〜15c ロータコア
16a〜16c マグネット
17a〜17c マグネットホルダ
18 マグネットカバー
21 レゾルバ
22 ロータ(レゾルバロータ)
23 ステータ(レゾルバステータ)
24 レゾルバホルダ
25 レゾルバブラケット
26 リブ
27 雌ネジ部
28 取付ネジ
N 未着磁帯
θskew スキュー角
θstep ステップ角
C1〜C3 マグネット中心点
L マグネット中心点を結ぶ線
O ロータ回転中心
P1,P2 直線Lとロータコア端部との交点
Claims (3)
- 2n(nは正の整数)個の磁極を有するロータと、3n個のスロットを有し複数相のコイルが取り付けられたステータとを備えてなるブラシレスモータであって、
前記ロータの前記磁極は、軸方向に沿って3列に配置された同一形状のセグメントマグネットにて形成されると共に、隣接列のマグネットが周方向にずれた位置に配置されたステップスキュー構造を有し、
前記セグメントマグネットのスキュー角θskewを、
θskew=θstep×マグネット段積み数
(θstep:前記各セグメントマグネット間のステップ角)
と定義したとき、
前記複数相のコイルの線間誘起電圧に含まれる全高調波成分に対する5次高調波成分の含有率が90%以上となるように、前記セグメントマグネットのスキュー角θskewを電気角36°〜57°に設定し、前記線間誘起電圧の波形を台形波状としたことを特徴とするブラシレスモータ。 - 請求項1記載のブラシレスモータにおいて、
正弦波駆動に対するトルク増加率及び回転数増加率をともに3%以上とすべく、前記線間誘起電圧の基本波に対する5次高調波成分の含有率が4.5%〜6.5%となるように前記スキュー角θskewを設定したことを特徴とするブラシレスモータ。 - 請求項1又は2記載のブラシレスモータにおいて、
前記ブラシレスモータは、電動パワーステアリングの駆動源として使用されるモータであることを特徴とするブラシレスモータ。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008054774A JP5123009B2 (ja) | 2008-03-05 | 2008-03-05 | ブラシレスモータ |
| US12/379,596 US7928622B2 (en) | 2008-03-05 | 2009-02-25 | Brushless motor with skewed rotor segments |
| DE102009001173.0A DE102009001173B4 (de) | 2008-03-05 | 2009-02-26 | Bürstenloser Motor |
| CN2009101261898A CN101572448B (zh) | 2008-03-05 | 2009-03-05 | 无刷马达 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008054774A JP5123009B2 (ja) | 2008-03-05 | 2008-03-05 | ブラシレスモータ |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2009213286A JP2009213286A (ja) | 2009-09-17 |
| JP5123009B2 true JP5123009B2 (ja) | 2013-01-16 |
Family
ID=40953225
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008054774A Expired - Fee Related JP5123009B2 (ja) | 2008-03-05 | 2008-03-05 | ブラシレスモータ |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US7928622B2 (ja) |
| JP (1) | JP5123009B2 (ja) |
| CN (1) | CN101572448B (ja) |
| DE (1) | DE102009001173B4 (ja) |
Families Citing this family (22)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102006033718B4 (de) * | 2006-07-20 | 2017-10-19 | Siemens Aktiengesellschaft | Elektrische Maschine mit schräg verlaufenden Magnetpolgrenzen |
| JP4708448B2 (ja) * | 2008-03-04 | 2011-06-22 | 日立オートモティブシステムズ株式会社 | 回転電機および電気自動車 |
| JP5414887B2 (ja) * | 2010-03-19 | 2014-02-12 | 三菱電機株式会社 | 永久磁石式同期モータ |
| JP2012125078A (ja) * | 2010-12-09 | 2012-06-28 | Toyo Electric Mfg Co Ltd | 永久磁石同期電動機の回転子 |
| JP5557058B2 (ja) * | 2011-01-18 | 2014-07-23 | 株式会社デンソー | 回転電機の固定子及びその製造方法 |
| JP6190677B2 (ja) * | 2013-09-20 | 2017-08-30 | 本田技研工業株式会社 | 回転電機のロータ |
| EP2897265A1 (en) * | 2014-01-15 | 2015-07-22 | Siemens Aktiengesellschaft | Rotor with a assembly of permanent magnets arranged in axial direction and electric machine comprising such a rotor |
| DE102014222044A1 (de) * | 2014-10-29 | 2016-05-19 | Volkswagen Aktiengesellschaft | Rotor einer elektrischen Maschine, elektrische Maschine und Verfahren zum Herstellen eines Rotors einer elektrischen Maschine |
| WO2017073275A1 (ja) * | 2015-10-30 | 2017-05-04 | 日立オートモティブシステムズ株式会社 | 磁石式回転子、磁石式回転子を備える回転電機及び回転電機を備える電気自動車 |
| WO2017221496A1 (ja) * | 2016-06-24 | 2017-12-28 | 三菱電機株式会社 | 永久磁石式回転電機の回転子および永久磁石式回転電機 |
| US10454323B2 (en) * | 2016-08-01 | 2019-10-22 | Ge Oil & Gas Esp, Inc. | Permanent magnet based electric machine and method of manufacturing the same |
| US11005312B2 (en) * | 2016-11-21 | 2021-05-11 | Unison Industries, Llc | Skewed stator designs for hybrid homopolar electrical machines |
| US11159067B2 (en) | 2016-12-28 | 2021-10-26 | Nidec Corporation | Rotor and motor |
| JP2019037032A (ja) * | 2017-08-10 | 2019-03-07 | 株式会社ミツバ | モータ装置 |
| US10770936B2 (en) * | 2017-08-10 | 2020-09-08 | Hamilton Sundstrand Corporation | Modular permanent magnet rotor |
| US10873227B2 (en) * | 2017-11-30 | 2020-12-22 | Steering Solutions Ip Holding Corporation | Interior permanent magnet synchronous machine |
| US10734876B2 (en) | 2018-03-19 | 2020-08-04 | Denso International America, Inc. | Brushless motor for HVAC system |
| US11855521B2 (en) | 2021-02-02 | 2023-12-26 | Black & Decker, Inc. | Brushless DC motor for a body-grip power tool |
| US12166383B2 (en) | 2021-08-30 | 2024-12-10 | Ford Global Technologies, Llc | Magnet fixation by transfer resin molding in a skewed rotor stack segment application |
| DE102022111442A1 (de) | 2022-05-09 | 2023-11-09 | eMoSys GmbH | Fluidgekühlte, mehrphasige permanenterregte Synchronmaschine |
| DE102022205740A1 (de) * | 2022-06-07 | 2023-12-07 | Robert Bosch Gesellschaft mit beschränkter Haftung | Verfahren zum Betrieb einer Ansteuervorrichtung zur Ansteuerung eines Elektromotors, insbesondere eines Lenksystems |
| WO2025206968A1 (en) * | 2024-03-27 | 2025-10-02 | Oprea Vasile Marius | Magnetic levitation transport system |
Family Cites Families (22)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2552824B2 (ja) * | 1985-02-28 | 1996-11-13 | 三菱製鋼 株式会社 | モ−タ− |
| JP2672178B2 (ja) * | 1990-05-15 | 1997-11-05 | ファナック株式会社 | 同期電動機のロータ構造 |
| JPH08126279A (ja) * | 1994-10-20 | 1996-05-17 | Hitachi Metals Ltd | ブラシレスdcモータ |
| JP3599066B2 (ja) | 1995-03-08 | 2004-12-08 | 株式会社安川電機 | 永久磁石形回転電機 |
| JPH1042531A (ja) * | 1996-05-24 | 1998-02-13 | Matsushita Electric Ind Co Ltd | 電動機 |
| JP3746372B2 (ja) * | 1998-04-16 | 2006-02-15 | 株式会社日立製作所 | 永久磁石式回転電機及びそれを用いた電動車両 |
| JP2001190050A (ja) * | 1999-04-01 | 2001-07-10 | Asmo Co Ltd | 回転磁界型電動機 |
| JP2000308286A (ja) * | 1999-04-16 | 2000-11-02 | Yamaha Motor Co Ltd | 回転電気機械 |
| CN2406411Y (zh) * | 1999-12-30 | 2000-11-15 | 无锡市中绿科技有限公司 | 单相双绕组直流无刷电机 |
| US6853105B2 (en) * | 2000-05-25 | 2005-02-08 | Mitsubishi Denki Kabushiki Kaisha | Permanent magnet motor |
| JP3691345B2 (ja) * | 2000-05-25 | 2005-09-07 | 三菱電機株式会社 | 永久磁石型電動機 |
| JP2003032936A (ja) * | 2001-07-16 | 2003-01-31 | Matsushita Electric Ind Co Ltd | 電動機 |
| JP2003284276A (ja) * | 2002-03-25 | 2003-10-03 | Mitsubishi Electric Corp | 回転電機 |
| US7067948B2 (en) * | 2002-10-18 | 2006-06-27 | Mitsubishi Denki Kabushiki Kaisha | Permanent-magnet rotating machine |
| JP4415634B2 (ja) * | 2002-10-18 | 2010-02-17 | 三菱電機株式会社 | 永久磁石式回転電機 |
| JP2004248422A (ja) * | 2003-02-14 | 2004-09-02 | Moric Co Ltd | 磁石界磁型回転電気機器 |
| JP4244299B2 (ja) | 2003-03-12 | 2009-03-25 | 三菱電機株式会社 | 電動パワーステアリング装置用永久磁石型モータ |
| US6867524B2 (en) * | 2003-06-04 | 2005-03-15 | Ford Global Technologies, Llc | Rotor skew methods for permanent magnet motors |
| JP4089527B2 (ja) * | 2003-06-27 | 2008-05-28 | 三菱電機株式会社 | 永久磁石式回転電機 |
| JP4311182B2 (ja) * | 2003-12-08 | 2009-08-12 | 日産自動車株式会社 | 回転電機の回転子 |
| JP2006174692A (ja) | 2004-11-19 | 2006-06-29 | Nippon Densan Corp | ブラシレスモータ |
| JP2006211826A (ja) * | 2005-01-28 | 2006-08-10 | Matsushita Electric Ind Co Ltd | 埋め込み磁石型ロータ |
-
2008
- 2008-03-05 JP JP2008054774A patent/JP5123009B2/ja not_active Expired - Fee Related
-
2009
- 2009-02-25 US US12/379,596 patent/US7928622B2/en not_active Expired - Fee Related
- 2009-02-26 DE DE102009001173.0A patent/DE102009001173B4/de not_active Expired - Fee Related
- 2009-03-05 CN CN2009101261898A patent/CN101572448B/zh active Active
Also Published As
| Publication number | Publication date |
|---|---|
| CN101572448B (zh) | 2013-01-16 |
| CN101572448A (zh) | 2009-11-04 |
| DE102009001173A1 (de) | 2009-09-17 |
| DE102009001173B4 (de) | 2020-03-05 |
| US20090224619A1 (en) | 2009-09-10 |
| JP2009213286A (ja) | 2009-09-17 |
| US7928622B2 (en) | 2011-04-19 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5123009B2 (ja) | ブラシレスモータ | |
| JP5123008B2 (ja) | ブラシレスモータ | |
| JP5523112B2 (ja) | ブラシレスモータ | |
| JP5058849B2 (ja) | ブラシレスモータ | |
| JP6249417B2 (ja) | 回転電機および電動パワーステアリング装置 | |
| JP6411833B2 (ja) | ブラシレスモータ | |
| JP6226867B2 (ja) | ブラシレスモータ及びブラシレスモータ用ロータ | |
| US20110018384A1 (en) | Motor | |
| JP2009213283A (ja) | ブラシレスモータ | |
| EP2445088A2 (en) | Brushless motor and electric power steering system | |
| JP2010051150A (ja) | ブラシレスモータ | |
| JP2014107939A (ja) | ブラシレスモータ | |
| JP2008141803A (ja) | ブラシレスモータ | |
| JP2013192359A (ja) | ブラシレスモータ | |
| JP5667803B2 (ja) | 回転電機の回転子 | |
| JP5199704B2 (ja) | ブラシレスモータ | |
| JP2014054060A (ja) | ブラシレスモータ | |
| JP2012227989A (ja) | ブラシレスモータ | |
| JP6641520B2 (ja) | 回転電機の制御装置、回転電機、および回転電機の制御方法 | |
| WO2022264588A1 (ja) | モータ | |
| JPH11285213A (ja) | 回転電機 | |
| JP2019009933A (ja) | モータ | |
| JP2013135548A (ja) | ブラシレスモータ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20100319 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20120329 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120508 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120705 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120731 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120926 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20121023 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20121025 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20151102 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 Ref document number: 5123009 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |