JP5148657B2 - アクセルペダル装置 - Google Patents
アクセルペダル装置 Download PDFInfo
- Publication number
- JP5148657B2 JP5148657B2 JP2010112432A JP2010112432A JP5148657B2 JP 5148657 B2 JP5148657 B2 JP 5148657B2 JP 2010112432 A JP2010112432 A JP 2010112432A JP 2010112432 A JP2010112432 A JP 2010112432A JP 5148657 B2 JP5148657 B2 JP 5148657B2
- Authority
- JP
- Japan
- Prior art keywords
- accelerator pedal
- electric motor
- fuse
- driving
- depression
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images

Landscapes
- Auxiliary Drives, Propulsion Controls, And Safety Devices (AREA)
Description
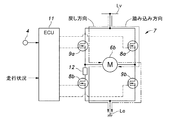
6b 電動モータ
7 モータ駆動回路
8a・8b スイッチング素子(踏み込み方向)
9a・9b スイッチング素子(戻し方向)
12 ヒューズ
Claims (2)
- 車両に設けられたアクセルペダルの踏み込み方向と戻し方向との両方向に駆動力を発生させる電動モータを備えたアクセルペダル装置において、
前記電動モータを駆動制御するモータ駆動回路が、前記電動モータに流す電流を前記踏み込み方向と前記戻し方向とにおいて互いに逆向きに流すために複数のスイッチング素子を用いたブリッジ回路と、前記電動モータに過電流が流れることを防止するためのヒューズとを有し、
前記ヒューズが、前記ブリッジ回路の前記踏み込み方向に前記電動モータを駆動させるための一対のスイッチング素子を通る電流経路にのみ配設されていることを特徴とするアクセルペダル装置。 - 前記ヒューズが、前記電動モータと、前記踏み込み方向に前記電動モータを駆動させるための一対のスイッチング素子の前記電動モータの接地側に設けられたものとの間に設けられていることを特徴とする請求項1に記載のアクセルペダル装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010112432A JP5148657B2 (ja) | 2010-05-14 | 2010-05-14 | アクセルペダル装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010112432A JP5148657B2 (ja) | 2010-05-14 | 2010-05-14 | アクセルペダル装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2011240744A JP2011240744A (ja) | 2011-12-01 |
| JP5148657B2 true JP5148657B2 (ja) | 2013-02-20 |
Family
ID=45407860
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010112432A Expired - Fee Related JP5148657B2 (ja) | 2010-05-14 | 2010-05-14 | アクセルペダル装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5148657B2 (ja) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014043236A (ja) * | 2012-08-02 | 2014-03-13 | Diamond Electric Mfg Co Ltd | アクセルペダル装置 |
| JP6077438B2 (ja) * | 2013-12-18 | 2017-02-08 | 株式会社ミツバ | 反力制御装置 |
| JP6161532B2 (ja) * | 2013-12-18 | 2017-07-12 | 株式会社ミツバ | 反力出力装置 |
| EP4063888B1 (en) * | 2021-03-25 | 2023-07-26 | Future Systems Besitz GmbH | Method and apparatus for detection of a fuse failure |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4089367B2 (ja) * | 2002-09-17 | 2008-05-28 | 株式会社ジェイテクト | 電動パワーステアリング装置 |
| JP4706363B2 (ja) * | 2005-07-15 | 2011-06-22 | トヨタ自動車株式会社 | 車両走行制御装置 |
| JP2008221909A (ja) * | 2007-03-09 | 2008-09-25 | Honda Motor Co Ltd | アクセルペダル装置 |
-
2010
- 2010-05-14 JP JP2010112432A patent/JP5148657B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2011240744A (ja) | 2011-12-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US8589028B2 (en) | Control apparatus for vehicle | |
| CN101421148B (zh) | 电动动力转向装置 | |
| JP3796377B2 (ja) | 電動パワーステアリング装置 | |
| JP5148657B2 (ja) | アクセルペダル装置 | |
| US11524715B2 (en) | Steering device | |
| JP5740175B2 (ja) | アクセルペダル装置 | |
| JP2020138554A (ja) | 車両の制御装置 | |
| JP7258919B2 (ja) | アクセルペダル装置 | |
| WO2015019790A1 (ja) | 電動モータの制御装置及び電動モータの制御方法 | |
| JP2009274686A (ja) | 電動パワーステアリング装置 | |
| JP5546524B2 (ja) | 車両のスタータモータ駆動回路 | |
| CN107531308A (zh) | 车辆的驱动力控制装置 | |
| JP5918647B2 (ja) | 車両用制御装置 | |
| JP5776559B2 (ja) | 給電制御装置 | |
| CN100402359C (zh) | 电动动力转向控制装置 | |
| JP2004178967A (ja) | リレー制御装置 | |
| JP2009067174A (ja) | 電動パワーステアリング装置の制御装置 | |
| CA2840694C (en) | Vehicle fault determination device | |
| KR20080053071A (ko) | 가속 페달 시스템 | |
| JP5018333B2 (ja) | 電動パワーステアリング装置の制御装置 | |
| JP2005028900A (ja) | 電動ステアリング装置におけるバッテリ状態判定装置 | |
| JP4908049B2 (ja) | ステアバイワイヤの操舵反力モータの制御方法 | |
| JPH06284564A (ja) | 負荷駆動回路の過電流保護装置 | |
| JP3945224B2 (ja) | 自動車の電源システム | |
| JP3897503B2 (ja) | アクチュエータ駆動装置の故障検出装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD02 | Notification of acceptance of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7422 Effective date: 20110917 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20121023 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20121030 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20121128 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5148657 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20151207 Year of fee payment: 3 |
|
| LAPS | Cancellation because of no payment of annual fees |