JP5201191B2 - ハイブリット車のクラッチ制御装置 - Google Patents
ハイブリット車のクラッチ制御装置 Download PDFInfo
- Publication number
- JP5201191B2 JP5201191B2 JP2010228057A JP2010228057A JP5201191B2 JP 5201191 B2 JP5201191 B2 JP 5201191B2 JP 2010228057 A JP2010228057 A JP 2010228057A JP 2010228057 A JP2010228057 A JP 2010228057A JP 5201191 B2 JP5201191 B2 JP 5201191B2
- Authority
- JP
- Japan
- Prior art keywords
- clutch
- engine
- motor
- rotational speed
- shaft
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images







Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W20/00—Control systems specially adapted for hybrid vehicles
- B60W20/40—Controlling the engagement or disengagement of prime movers, e.g. for transition between prime movers
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K6/00—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines
- B60K6/20—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs
- B60K6/42—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs characterised by the architecture of the hybrid electric vehicle
- B60K6/44—Series-parallel type
- B60K6/442—Series-parallel switching type
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/02—Conjoint control of vehicle sub-units of different type or different function including control of driveline clutches
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/04—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units
- B60W10/06—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units including control of combustion engines
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/04—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units
- B60W10/08—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units including control of electric propulsion units, e.g. motors or generators
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W20/00—Control systems specially adapted for hybrid vehicles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/02—Ensuring safety in case of control system failures, e.g. by diagnosing, circumventing or fixing failures
- B60W50/0205—Diagnosing or detecting failures; Failure detection models
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2510/00—Input parameters relating to a particular sub-units
- B60W2510/02—Clutches
- B60W2510/0208—Clutch engagement state, e.g. engaged or disengaged
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2510/00—Input parameters relating to a particular sub-units
- B60W2510/06—Combustion engines, Gas turbines
- B60W2510/0638—Engine speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2510/00—Input parameters relating to a particular sub-units
- B60W2510/06—Combustion engines, Gas turbines
- B60W2510/0676—Engine temperature
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2510/00—Input parameters relating to a particular sub-units
- B60W2510/08—Electric propulsion units
- B60W2510/081—Speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2520/00—Input parameters relating to overall vehicle dynamics
- B60W2520/10—Longitudinal speed
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/62—Hybrid vehicles
Landscapes
- Engineering & Computer Science (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Automation & Control Theory (AREA)
- Human Computer Interaction (AREA)
- Hybrid Electric Vehicles (AREA)
- Hydraulic Clutches, Magnetic Clutches, Fluid Clutches, And Fluid Joints (AREA)
- Electric Propulsion And Braking For Vehicles (AREA)
- Control Of Vehicle Engines Or Engines For Specific Uses (AREA)
Description
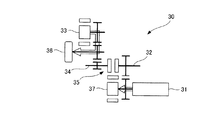
EV走行のときには、図8に示すように、モータ33を駆動して、車両30のタイヤ36を駆動している。このとき、エンジン31は停止しており、発電機37による発電も停止しており、クラッチ35は開放状態である。
モータにより駆動され、駆動軸と接続されたモータ軸とエンジンにより駆動されるエンジン軸との間の結合/開放を行うクラッチと、
油圧により前記クラッチの結合/開放を制御する油圧手段と、
前記油圧の油温を検知する油温検知手段と、
車両の車速を検知する車速検知手段と、
前記モータ軸と前記エンジン軸との間を結合して、前記エンジンにより前記車両を駆動するエンジン走行状態と、前記モータ軸と前記エンジン軸との間を開放して、前記モータにより前記車両を駆動するモータ走行状態との切り換えを、前記油圧手段を介し、前記クラッチを制御して行う制御手段とを有し、
前記制御手段は、
前記エンジン走行状態から前記モータ走行状態へ変更する際、前記クラッチが結合している状態から完全に開放するまでの応答時間を、前記車速に対する推定時間マップから求める第1推定時間と前記油温に対する推定時間マップから求める第2推定時間とを比較して、いずれか大きい方を前記応答時間として求め、
前記クラッチの開放制御を開始してから前記応答時間経過後、前記クラッチを完全に開放したと判断して、前記モータ走行状態における制御を許可することを特徴とする。
上記課題を解決する第2の発明に係るハイブリット車のクラッチ制御装置は、
上記第1の発明に記載のハイブリット車のクラッチ制御装置において、
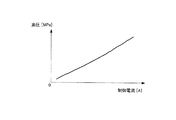
前記車速に対する推定時間マップは、所定車速までは車速の増加に反比例して推定時間が減少し、前記所定車速以降は推定時間が一定し、
前記油温に対する推定時間マップは、所定油温までは油温の増加に反比例して推定時間が減少し、前記所定油温以降は油温の増加に略比例して推定時間が増加することを特徴とする。
上記第1又は第2の発明に記載のハイブリット車のクラッチ制御装置において、
前記モータ軸のモータ軸回転数を検知するモータ軸回転数検知手段と、前記エンジン軸のエンジン軸回転数を検知するエンジン軸回転数検知手段とを更に有し、
前記制御手段は、
前記クラッチの開放制御を開始してから前記応答時間経過後、前記モータを制御し、走行に必要なモータ軸目標回転数で前記モータ軸を回転させると共に、前記エンジンを制御し、前記モータ軸目標回転数と所定回転数異なるエンジン軸目標回転数で前記エンジン軸を回転させ、
検知した前記モータ軸回転数と検知した前記エンジン軸回転数との差が前記所定回転数以上のとき、前記クラッチが完全に開放したと判断して、前記モータ走行状態における制御を許可することを特徴とする。
上記第3の発明に記載のハイブリット車のクラッチ制御装置において、
前記制御手段は、
検知した前記モータ軸回転数と検知した前記エンジン軸回転数との差が前記所定回転数未満のとき、前記クラッチに故障があると判定し、前記モータ走行状態における制御を禁止することを特徴とする。
図1は、本発明に係るハイブリット車のクラッチ制御装置を有する車両の構成図である。又、図2は、油圧制御弁の油圧特性を説明するグラフであり、図3は、油圧制御弁の油圧応答性を説明するグラフである。又、図4、図5は、本発明に係るハイブリット車のクラッチ制御装置における制御を説明する図であり、図4は、その制御を説明するフローチャートであり、図5は、クラッチ開放時間を演算するときのブロック図である。
EV−ECU23において、クラッチ開放フラグがONであるかどうか確認する。クラッチ開放フラグがONであれば、クラッチ16が開放状態であり、EV走行又はシリーズ走行中であるので、一連の制御手順を終了し、クラッチ開放フラグがONでなければ、クラッチ16が結合状態であり、パラレル走行中であるので、ステップS2へ進む。
パラレル走行が終了かどうか確認する。例えば、車両10の車速が、パラレル走行からEV走行、シリーズ走行へモード変更する速度となれば、パラレル走行が終了となる。パラレル走行が終了する場合には、ステップS3へ進み、パラレル走行が終了しない場合には、一連の制御手順を終了する。
EV−ECU23から油圧制御弁にクラッチ開放制御電流を流し、ステップS4へ進む。
クラッチ開放時間Ta(応答時間)を推定時間マップにより演算する。
クラッチ開放制御電流を流し始めてからの経過時間Tが、演算したクラッチ開放時間Taを過ぎるまで待ち、経過時間Tがクラッチ開放時間Taを過ぎた後、ステップS6へ進む。
EV−ECU23において、クラッチ開放フラグをONとする。その結果、後続する制御、即ち、EV走行、シリーズ走行における制御が許可されて、実施されることになる。
図6、図7は、本発明に係るハイブリット車のクラッチ制御装置における他の制御を説明する図であり、図6は、その制御を説明するフローチャートであり、図7は、差回転制御を説明する図である。
EV−ECU23において、クラッチ開放フラグがONであるかどうか確認する。クラッチ開放フラグがONであれば、一連の制御手順を終了し、クラッチ開放フラグがONでなければ、ステップS2へ進む。
パラレル走行が終了かどうか確認する。パラレル走行が終了する場合には、ステップS3へ進み、パラレル走行が終了でない場合には、一連の制御手順を終了する。
EV−ECU23から油圧制御弁にクラッチ開放制御電流を流し、ステップS4へ進む。
クラッチ開放時間Taを推定時間マップにより演算し、演算後、ステップS5へ進む。
経過時間Tがクラッチ開放時間Taを過ぎてから、ステップSP1へ進む。クラッチ開放時間Taは、次のステップSP1での差回転制御の開始タイミングを図る意味もある。
経過時間Tがクラッチ開放時間Taを過ぎた後、モータ軸とエンジン軸とが機械的に動力遮断されたかどうかを確認するため、差回転制御を行う。図7を参照して、差回転制御を説明すると、差回転制御では、モータ15を制御して、走行に必要なモータ軸目標回転数Nmt[rpm]でモータ軸26を回転させると共に、エンジン11を制御して、モータ軸目標回転数Nmtとは所定回転数(例えば、100rpm)異なるエンジン軸目標回転数Net[rpm]でエンジン軸25を回転させる。このエンジン軸目標回転数Netは、モータ軸目標回転数Nmtと異なるように、モータ軸目標回転数Nmtから差回転数Na[rpm]を減算した回転数としている。差回転制御で設定するエンジン軸目標回転数Netとしては、クラッチ16が故障している場合を考慮し、車両10の急加速を防止するために、減速側に設定することが望ましい。そのため、[(エンジン軸目標回転数Net)=(モータ軸目標回転数Nmt)−(差回転数Na)]としている。
そして、上述した差回転制御中に、エンジン軸25及びモータ軸26の回転数を回転数センサで独立して検知すると共に、検知したエンジン軸回転数Ne、モータ軸回転数Nmが下記式1を見たすかどうか確認する。この式1を満たす場合には、ステップS6へ進み、この式1を満たさない場合には、ステップSP3へ進む。
クラッチ16に故障等が無く、クラッチ16が完全に開放されていたら、モータ軸回転数Nm=モータ軸目標回転数Nmtであり、エンジン軸回転数Ne=エンジン軸目標回転数Netであり、上記式1を満たすことになる。従って、式1を満たす場合には、クラッチ16が開放状態であることを確認することになり、EV−ECU23において、クラッチ開放フラグをONとする。その結果、後続する制御、即ち、EV走行、シリーズ走行における制御が許可されて、実施されることになる。
一方、故障(例えば、固着)等によりクラッチ16が結合したままの状態であれば、モータ軸回転数Nmはモータ軸目標回転数Nmtと一致せず、エンジン軸回転数Neもエンジン軸目標回転数Netと一致せず、互いに同期するような回転数となり、上記式1を満たせない。従って、式1を満たさない場合には、クラッチが結合(又は半クラッチ)であると故障判定することができ、EV−ECU23において、クラッチ開放フラグをONとすることはない。その結果、後続する制御、即ち、EV走行、シリーズ走行における制御を禁止して、二次故障の発生を低減することができる。
11 エンジン
12 発電機
13 高圧バッテリ
15 モータ
16 クラッチ
23 EV−ECU
24 BMU
Claims (4)
- モータにより駆動され、駆動軸と接続されたモータ軸とエンジンにより駆動されるエンジン軸との間の結合/開放を行うクラッチと、
油圧により前記クラッチの結合/開放を制御する油圧手段と、
前記油圧の油温を検知する油温検知手段と、
車両の車速を検知する車速検知手段と、
前記モータ軸と前記エンジン軸との間を結合して、前記エンジンにより前記車両を駆動するエンジン走行状態と、前記モータ軸と前記エンジン軸との間を開放して、前記モータにより前記車両を駆動するモータ走行状態との切り換えを、前記油圧手段を介し、前記クラッチを制御して行う制御手段とを有し、
前記制御手段は、
前記エンジン走行状態から前記モータ走行状態へ変更する際、前記クラッチが結合している状態から完全に開放するまでの応答時間を、前記車速に対する推定時間マップから求める第1推定時間と前記油温に対する推定時間マップから求める第2推定時間とを比較して、いずれか大きい方を前記応答時間として求め、
前記クラッチの開放制御を開始してから前記応答時間経過後、前記クラッチを完全に開放したと判断して、前記モータ走行状態における制御を許可することを特徴とするハイブリット車のクラッチ制御装置。 - 請求項1に記載のハイブリット車のクラッチ制御装置において、
前記車速に対する推定時間マップは、所定車速までは車速の増加に反比例して推定時間が減少し、前記所定車速以降は推定時間が一定し、
前記油温に対する推定時間マップは、所定油温までは油温の増加に反比例して推定時間が減少し、前記所定油温以降は油温の増加に略比例して推定時間が増加することを特徴とするハイブリット車のクラッチ制御装置。 - 請求項1又は請求項2に記載のハイブリット車のクラッチ制御装置において、
前記モータ軸のモータ軸回転数を検知するモータ軸回転数検知手段と、前記エンジン軸のエンジン軸回転数を検知するエンジン軸回転数検知手段とを更に有し、
前記制御手段は、
前記クラッチの開放制御を開始してから前記応答時間経過後、前記モータを制御し、走行に必要なモータ軸目標回転数で前記モータ軸を回転させると共に、前記エンジンを制御し、前記モータ軸目標回転数と所定回転数異なるエンジン軸目標回転数で前記エンジン軸を回転させ、
検知した前記モータ軸回転数と検知した前記エンジン軸回転数との差が前記所定回転数以上のとき、前記クラッチが完全に開放したと判断して、前記モータ走行状態における制御を許可することを特徴とするハイブリット車のクラッチ制御装置。 - 請求項3に記載のハイブリット車のクラッチ制御装置において、
前記制御手段は、
検知した前記モータ軸回転数と検知した前記エンジン軸回転数との差が前記所定回転数未満のとき、前記クラッチに故障があると判定し、前記モータ走行状態における制御を禁止することを特徴とするハイブリット車のクラッチ制御装置。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010228057A JP5201191B2 (ja) | 2010-10-08 | 2010-10-08 | ハイブリット車のクラッチ制御装置 |
| US13/269,181 US8538618B2 (en) | 2010-10-08 | 2011-10-07 | Clutch control device of hybrid vehicle |
| EP11184375.1A EP2439118B1 (en) | 2010-10-08 | 2011-10-07 | Hybrid vehicle and method of controlling a hybrid vehicle |
| CN201110296862.XA CN102442305B (zh) | 2010-10-08 | 2011-10-08 | 混合动力车辆的离合器控制装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010228057A JP5201191B2 (ja) | 2010-10-08 | 2010-10-08 | ハイブリット車のクラッチ制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2012081811A JP2012081811A (ja) | 2012-04-26 |
| JP5201191B2 true JP5201191B2 (ja) | 2013-06-05 |
Family
ID=45044313
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010228057A Expired - Fee Related JP5201191B2 (ja) | 2010-10-08 | 2010-10-08 | ハイブリット車のクラッチ制御装置 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US8538618B2 (ja) |
| EP (1) | EP2439118B1 (ja) |
| JP (1) | JP5201191B2 (ja) |
| CN (1) | CN102442305B (ja) |
Families Citing this family (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2012053596A1 (ja) * | 2010-10-22 | 2012-04-26 | 日野自動車株式会社 | 車両および制御方法、並びにプログラム |
| JP5892315B2 (ja) * | 2011-12-13 | 2016-03-23 | 三菱自動車工業株式会社 | ハイブリッド車両のクラッチ制御装置 |
| JP2014105851A (ja) * | 2012-11-30 | 2014-06-09 | Toyota Motor Corp | 車両の走行制御装置 |
| KR101405198B1 (ko) * | 2012-12-07 | 2014-06-27 | 기아자동차 주식회사 | 하이브리드 차량의 안티 저크 제어 방법 및 시스템 |
| JP5618105B2 (ja) | 2013-01-09 | 2014-11-05 | 三菱自動車工業株式会社 | ハイブリッド車両の制御装置 |
| US9415772B2 (en) | 2013-03-14 | 2016-08-16 | Textron Innovations Inc. | Rear drive module for a vehicle |
| WO2014175030A1 (ja) * | 2013-04-26 | 2014-10-30 | 日産自動車株式会社 | ハイブリッド車両のクラッチ制御装置 |
| JP6079521B2 (ja) * | 2013-09-13 | 2017-02-15 | 日産自動車株式会社 | ハイブリッド車両 |
| CN103465899B (zh) * | 2013-09-23 | 2016-06-29 | 湖南南车时代电动汽车股份有限公司 | 一种混联车发动机启动控制系统及方法 |
| EP3053793B1 (en) * | 2013-09-30 | 2018-10-24 | Nissan Motor Co., Ltd | Device and method for controlling hybrid vehicle |
| JP6156243B2 (ja) * | 2014-04-16 | 2017-07-05 | トヨタ自動車株式会社 | ハイブリッド車両の制御装置 |
| JP6481193B2 (ja) * | 2014-06-13 | 2019-03-13 | 三菱自動車工業株式会社 | 電動車両 |
| CN110861596B (zh) * | 2018-08-27 | 2021-04-06 | 广州汽车集团股份有限公司 | 主油压力调节的方法、装置、控制设备和存储介质 |
| CN111156265B (zh) * | 2019-12-25 | 2021-09-28 | 中国第一汽车股份有限公司 | 离合器压力的确定方法、装置、车辆及存储介质 |
| CN115416640B (zh) * | 2022-09-21 | 2025-09-09 | 中国第一汽车股份有限公司 | 车辆及其控制方法和装置 |
Family Cites Families (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3322072B2 (ja) * | 1994-08-12 | 2002-09-09 | トヨタ自動車株式会社 | 動力伝達機構の潤滑装置 |
| JP3172490B2 (ja) * | 1998-05-18 | 2001-06-04 | 株式会社日立製作所 | ハイブリッド車 |
| JP3424562B2 (ja) * | 1998-09-16 | 2003-07-07 | 日産自動車株式会社 | 自動変速機の変速制御装置 |
| JP4218129B2 (ja) * | 1999-05-24 | 2009-02-04 | アイシン・エィ・ダブリュ株式会社 | 油圧発生装置及びそれを用いたハイブリッド車輌 |
| US7103463B2 (en) * | 2004-05-15 | 2006-09-05 | General Motors Corporation | Hydraulic clutch state diagnostic and control |
| JP3702897B2 (ja) | 2004-05-24 | 2005-10-05 | 日産自動車株式会社 | ハイブリッド車両の制御装置 |
| US7322903B2 (en) * | 2006-02-27 | 2008-01-29 | Ford Global Technologies, Llc | Control method for cooling a launch clutch and an electric motor in a hybrid electric vehicle powertrain |
| JP4396661B2 (ja) * | 2006-05-26 | 2010-01-13 | 日産自動車株式会社 | ハイブリッド車両のクラッチ締結制御装置 |
| JP2008081099A (ja) * | 2006-08-29 | 2008-04-10 | Nissan Motor Co Ltd | ハイブリッド車両の制御装置 |
| JP4867594B2 (ja) * | 2006-11-10 | 2012-02-01 | 日産自動車株式会社 | 車両の制御装置 |
| JP2008185081A (ja) * | 2007-01-29 | 2008-08-14 | Toyota Motor Corp | クラッチ断続状態検出装置、変速段検出装置及び変速指示装置 |
| JP2008303918A (ja) * | 2007-06-05 | 2008-12-18 | Toyota Motor Corp | 自動変速機の作動油冷却装置 |
| KR100992771B1 (ko) * | 2007-09-05 | 2010-11-05 | 기아자동차주식회사 | 하이브리드 차량의 아이들 스탑 진입 제어 방법 |
| JP2008002687A (ja) * | 2007-09-25 | 2008-01-10 | Fujitsu Ten Ltd | 無段変速機制御装置 |
| US8079933B2 (en) * | 2007-11-04 | 2011-12-20 | GM Global Technology Operations LLC | Method and apparatus to control engine torque to peak main pressure for a hybrid powertrain system |
| KR100992781B1 (ko) * | 2007-12-13 | 2010-11-05 | 기아자동차주식회사 | 하이브리드 차량의 클러치 결합제어를 위한 시스템과 그방법 |
| JP2009274566A (ja) * | 2008-05-14 | 2009-11-26 | Honda Motor Co Ltd | 車両制御装置 |
| JP5187111B2 (ja) * | 2008-10-06 | 2013-04-24 | トヨタ自動車株式会社 | 車両の駆動制御装置 |
| JP2010188776A (ja) * | 2009-02-16 | 2010-09-02 | Nissan Motor Co Ltd | ハイブリッド車両の制御装置 |
-
2010
- 2010-10-08 JP JP2010228057A patent/JP5201191B2/ja not_active Expired - Fee Related
-
2011
- 2011-10-07 EP EP11184375.1A patent/EP2439118B1/en not_active Not-in-force
- 2011-10-07 US US13/269,181 patent/US8538618B2/en not_active Expired - Fee Related
- 2011-10-08 CN CN201110296862.XA patent/CN102442305B/zh not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| US8538618B2 (en) | 2013-09-17 |
| EP2439118A1 (en) | 2012-04-11 |
| CN102442305A (zh) | 2012-05-09 |
| JP2012081811A (ja) | 2012-04-26 |
| US20120089285A1 (en) | 2012-04-12 |
| CN102442305B (zh) | 2014-10-15 |
| EP2439118B1 (en) | 2013-05-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5201191B2 (ja) | ハイブリット車のクラッチ制御装置 | |
| CN103260987B (zh) | 混合动力车辆的控制装置 | |
| JP5201190B2 (ja) | ハイブリット車のクラッチ制御装置 | |
| CN102725172B (zh) | 控制装置 | |
| CN104582988B (zh) | 当检测到碰撞时控制混合动力车辆的控制装置 | |
| CN105083271B (zh) | 用于混合动力传动系的发动机自动停止控制系统和方法 | |
| JP6575235B2 (ja) | ハイブリッド車両の発進制御方法および発進制御装置 | |
| JP5125727B2 (ja) | ハイブリッド車両の発進制御装置 | |
| JP2014196101A (ja) | 制御装置 | |
| US9096208B2 (en) | Controlling a traction motor during engine pull-up in a vehicle | |
| CN105392682A (zh) | 用于混合动力车辆的控制系统 | |
| JP2015202830A (ja) | ハイブリッド車両の制御装置 | |
| JP6260173B2 (ja) | 車両の制御装置 | |
| JP5476721B2 (ja) | ハイブリッド車両の制御装置 | |
| CN105452037A (zh) | 用于混合动力车辆的控制设备和控制方法 | |
| CN105620469B (zh) | 混合动力车辆换挡事件中发动机和马达之间的离合器控制 | |
| CN105452078A (zh) | 用于混合动力车辆的控制系统 | |
| CN103204071B (zh) | 用于车辆的驱动力输出装置 | |
| JP6492908B2 (ja) | ハイブリッド車両の制御装置 | |
| JP6194735B2 (ja) | ハイブリッド車両の制御装置 | |
| JP2014213748A (ja) | 車両制御装置 | |
| JP6354416B2 (ja) | ハイブリッド車両の制御装置 | |
| JP6286972B2 (ja) | ハイブリッド車両の制御装置 | |
| JP5699533B2 (ja) | ハイブリッド車両の制御装置 | |
| JP2015074334A (ja) | 車両 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20120927 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20121023 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20121220 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130115 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130128 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 5201191 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20160222 Year of fee payment: 3 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| LAPS | Cancellation because of no payment of annual fees |