JP5201493B2 - 位置検出装置及び直線駆動装置 - Google Patents
位置検出装置及び直線駆動装置 Download PDFInfo
- Publication number
- JP5201493B2 JP5201493B2 JP2011208431A JP2011208431A JP5201493B2 JP 5201493 B2 JP5201493 B2 JP 5201493B2 JP 2011208431 A JP2011208431 A JP 2011208431A JP 2011208431 A JP2011208431 A JP 2011208431A JP 5201493 B2 JP5201493 B2 JP 5201493B2
- Authority
- JP
- Japan
- Prior art keywords
- sensor
- sensor device
- stator
- bridge
- fixed layer
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 238000001514 detection method Methods 0.000 title claims description 72
- 230000005415 magnetization Effects 0.000 claims description 97
- 230000005405 multipole Effects 0.000 claims description 72
- 230000004907 flux Effects 0.000 claims description 52
- 230000000694 effects Effects 0.000 claims description 20
- 238000004364 calculation method Methods 0.000 claims description 9
- 238000006243 chemical reaction Methods 0.000 claims description 3
- 238000006073 displacement reaction Methods 0.000 description 28
- 239000000758 substrate Substances 0.000 description 11
- 230000014509 gene expression Effects 0.000 description 10
- 230000000052 comparative effect Effects 0.000 description 7
- 238000010586 diagram Methods 0.000 description 5
- 238000000034 method Methods 0.000 description 5
- 230000008859 change Effects 0.000 description 4
- 238000004458 analytical method Methods 0.000 description 3
- 230000003111 delayed effect Effects 0.000 description 3
- 235000012431 wafers Nutrition 0.000 description 3
- 238000003491 array Methods 0.000 description 2
- 230000006872 improvement Effects 0.000 description 2
- 238000009434 installation Methods 0.000 description 2
- 238000004519 manufacturing process Methods 0.000 description 2
- 239000000463 material Substances 0.000 description 2
- 238000005259 measurement Methods 0.000 description 2
- 230000002093 peripheral effect Effects 0.000 description 2
- 230000008569 process Effects 0.000 description 2
- 239000011347 resin Substances 0.000 description 2
- 229920005989 resin Polymers 0.000 description 2
- 229910001030 Iron–nickel alloy Inorganic materials 0.000 description 1
- 230000003321 amplification Effects 0.000 description 1
- 239000011248 coating agent Substances 0.000 description 1
- 238000000576 coating method Methods 0.000 description 1
- 238000002474 experimental method Methods 0.000 description 1
- 238000001459 lithography Methods 0.000 description 1
- 239000000696 magnetic material Substances 0.000 description 1
- 238000000465 moulding Methods 0.000 description 1
- 229910001172 neodymium magnet Inorganic materials 0.000 description 1
- 238000003199 nucleic acid amplification method Methods 0.000 description 1
- 230000002787 reinforcement Effects 0.000 description 1
- 230000003014 reinforcing effect Effects 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 238000004804 winding Methods 0.000 description 1
Images













Landscapes
- Transmission And Conversion Of Sensor Element Output (AREA)
- Linear Motors (AREA)
Description
本発明の第1の位置検出装置は、多磁極列を表面に有する固定子と、前記固定子の多磁極列面に対して平行移動すると共に前記固定子からの磁束の向きを検知する第1のセンサデバイス及び第2のセンサデバイスとを備えた位置検出装置であって、前記第1のセンサデバイスは、互いに固定層磁化方向が直交するセンサブリッジX01とセンサブリッジY01とを内蔵し、前記第2のセンサデバイスは、互いに固定層磁化方向が直交するセンサブリッジX02とセンサブリッジY02とを内蔵し、前記センサブリッジX01,Y01,X02及びY02は、それぞれがスピンバルブ型巨大磁気抵抗効果素子(固定層と自由層を有し、固定層磁化方向が固定されており、自由層磁化方向が磁界の向きに応じて回転する磁気抵抗素子)のフルブリッジであり、前記フルブリッジ中の隣り合う辺のスピンバルブ型巨大磁気抵抗効果素子の固定層磁化方向が反平行であり、前記センサブリッジY01及びセンサブリッジY02は固定層磁化方向が前記固定子の多磁極列の向きに沿うように配置されており、前記センサブリッジX01の固定層磁化方向とセンサブリッジX02の固定層磁化方向とは位置がλ/4又はλ/4±nλ/2(但し、λは多磁極列の同極性の磁極のピッチ、nは整数である。)異なるように配置されており、前記フルブリッジのそれぞれに電圧を印加することにより、前記固定層磁化方向と前記自由層磁化方向とのなす角度に応じた差動出力を得て、前記差動出力を基にして位置信号を得ることを特徴とする。
本発明の第2の位置検出装置は、多磁極列を表面に有する固定子と、前記固定子の多磁極列面に対して平行移動すると共に前記固定子からの磁束の向きを検知するセンサデバイスを備えた位置検出装置であって、
前記センサデバイスは、互いに固定層磁化方向が直交するセンサブリッジX01とセンサブリッジY01とを内蔵し、
前記センサブリッジX01及びY01は、それぞれがスピンバルブ型巨大磁気抵抗効果素子(固定層と自由層を有し、固定層磁化方向が固定されており、自由層磁化方向が磁界の向きに応じて回転する磁気抵抗素子)のブリッジ回路であり、
前記センサブリッジX01及びY01において、電気的に隣り合う辺のスピンバルブ型巨大磁気抵抗効果素子の固定層磁化方向が反平行であり、
前記センサブリッジX01及びY01の固定層磁化方向を含む平面が、前記固定子の多磁極列面の厚み中心点を通りかつ多磁極列面に垂直な平面に対して傾いており、
前記センサブリッジX01及びY01のそれぞれに電圧を印加することにより、前記固定層磁化方向と前記自由層磁化方向とのなす角度に応じた出力を得て、前記出力を基にして位置信号を得ることを特徴とする。
本発明の第3の位置検出装置は、多磁極列を表面に有する固定子と、前記固定子の多磁極列面に対して平行移動すると共に前記固定子からの磁束の向きを検知するセンサデバイスを備えた位置検出装置であって、
前記センサデバイスは、互いに固定層磁化方向が直交するセンサブリッジX01とセンサブリッジY01とを内蔵し、
前記センサブリッジX01及びY01は、それぞれがスピンバルブ型巨大磁気抵抗効果素子(固定層と自由層を有し、固定層磁化方向が固定されており、自由層磁化方向が磁界の向きに応じて回転する磁気抵抗素子)のブリッジ回路であり、
前記センサブリッジX01及びY01において、電気的に隣り合う辺のスピンバルブ型巨大磁気抵抗効果素子の固定層磁化方向が反平行であり、
前記センサデバイスの中心は、前記固定子の多磁極列面の厚み中心点を通りかつ多磁極列面に垂直な平面から、固定子の多磁極列面の厚さ方向に離れており、
前記センサブリッジX01及びY01のそれぞれに電圧を印加することにより、前記固定層磁化方向と前記自由層磁化方向とのなす角度に応じた出力を得て、前記出力を基にして位置信号を得ることを特徴とする。
本発明の第4の位置検出装置は、多磁極列を表面に有する固定子と、前記固定子の多磁極列面に対して平行移動すると共に前記固定子からの磁束の向きを検知する第一のセンサデバイス及び第二のセンサデバイスとを備えた位置検出装置であって、前記第1のセンサデバイスは、互いに固定層磁化方向が直交するセンサブリッジX01とセンサブリッジY01とを内蔵し、前記第2のセンサデバイスは、互いに固定層磁化方向が直交するセンサブリッジX02とセンサブリッジY02とを内蔵し、前記センサブリッジX01、Y01、X02及びY02は、それぞれがスピンバルブ型巨大磁気抵抗効果素子(固定層と自由層を有し、固定層磁化方向が固定されており、自由層磁化方向が磁界の向きに応じて回転する磁気抵抗素子)のブリッジ回路であり、前記センサブリッジX01、Y01、X02及びY02において、電気的に隣り合う辺のスピンバルブ型巨大磁気抵抗効果素子の固定層磁化方向が反平行であり、前記センサブリッジX01、Y01、X02及びY02の固定層磁化方向を含む平面が、前記固定子の多磁極列面の厚み中心点を通りかつ多磁極列面に垂直な平面に対して傾いており、前記センサブリッジX01、Y01、X02及びY02のそれぞれに電圧を印加することにより、前記固定層磁化方向と前記自由層磁化方向とのなす角度に応じた出力を得て、前記出力を基にして位置信号を得ることを特徴とする。
本発明の第5の位置検出装置は、多磁極列を表面に有する固定子と、前記固定子の多磁極列面に対して平行移動すると共に前記固定子からの磁束の向きを検知する第1のセンサデバイス及び第2のセンサデバイスとを備えた位置検出装置であって、
前記第1のセンサデバイスは、互いに固定層磁化方向が直交するセンサブリッジX01とセンサブリッジY01とを内蔵し、
前記第2のセンサデバイスは、互いに固定層磁化方向が直交するセンサブリッジX02とセンサブリッジY02とを内蔵し、
前記センサブリッジX01、Y01、X02及びY02は、それぞれがスピンバルブ型巨大磁気抵抗効果素子(固定層と自由層を有し、固定層磁化方向が固定されており、自由層磁化方向が磁界の向きに応じて回転する磁気抵抗素子)のブリッジ回路であり、
前記センサブリッジX01、Y01、X02及びY02において、電気的に隣り合う辺のスピンバルブ型巨大磁気抵抗効果素子の固定層磁化方向が反平行であり、
前記第1のセンサデバイス及び前記第2のセンサデバイスの中心は、前記固定子の多磁極列面の厚み中心点を通りかつ多磁極列面に垂直な平面から、固定子の多磁極列面の厚さ方向に離れており、
前記センサブリッジX01、Y01、X02及びY02のそれぞれに電圧を印加することにより、前記固定層磁化方向と前記自由層磁化方向とのなす角度に応じた出力を得て、前記出力を基にして位置信号を得ることを特徴とする。
本発明の第6の位置検出装置は、多磁極列を有する固定子と、前記固定子の多磁極列面に対して平行移動すると共に前記固定子からの磁束の向きを検知するセンサデバイスとを備える位置検出装置であって、前記センサデバイスは、複数のスピンバルブ型巨大磁気抵抗効果素子(固定層と自由層を有し、固定層磁化方向が固定されており、自由層磁化方向が磁場の向きに応じて回転する磁気抵抗素子)で構成された感磁面を有し、磁束を前記感磁面と交差させて、前記感磁面内で直交する磁束密度成分同士の振幅の大きさが等しくなるように、前記固定子に対して前記センサデバイスが設けられていることを特徴とする。
本発明の第7の位置検出装置は、多磁極列を有する固定子と、前記固定子の多磁極列面に対して平行移動すると共に前記固定子からの磁束の向きを検知するセンサデバイスとを備える位置検出装置であって、前記センサデバイスは、複数のスピンバルブ型巨大磁気抵抗効果素子(固定層と自由層を有し、固定層磁化方向が固定されており、自由層磁化方向が磁場の向きに応じて回転する磁気抵抗素子)で構成された感磁面を有し、空間磁束密度の振幅比K0=B⊥0/B//0≠1となる位置で、前記感磁面内で直交する実効磁束密度の振幅比Keff=B⊥eff0/B//eff0が1となるように、前記固定子に対して前記センサデバイスが設けられていることを特徴とする。
本発明の直線駆動装置は、前記いずれかの位置検出装置と、前記固定子の多磁極列面に対向すると共に前記可動子に設けられたコイルとを備えることを特徴とする。
図1には、固定子11に対するセンサデバイス12aの位置を検出する位置検出装置を示す。図1(b)は図1(a)のA−A断面図である。固定子11は、焼結磁石のブロックが隣あうように1列に連結されており、N極とS極が交互になるようにλ/2で並び、多磁極列を構成する。太い矢印で表わした磁化の向きに直交する側面(磁束の出入りする側の面)が、多磁極列面である。この構成ではセンサデバイス12aが可動子に相当し、固定子11の磁極の配列方向に沿って平行移動可能に配置されている。センサデバイスを平行移動させると、多磁極列からセンサデバイスが回転磁界を受けるので、自由層が回転し、位置に応じた出力をセンサデバイスから取り出すことができる。センサデバイスに接続する電子回路の詳細は後述する。固定子の厚み中心を通り且つ多磁極列面に直交する平面とセンサデバイス12aの感磁面との距離はh’≠0である。固定子の厚み中心を通り且つ多磁極列面に平行な平面とセンサデバイス12aの中心(感磁面の中心)との距離はr1である。センサデバイスの感磁面内において、磁極の配列方向(多磁極列方向)に沿った磁束密度成分の振幅の大きさと磁極の配列方向に直交する磁束密度成分の振幅の大きさとがほぼ等しくなるように、センサデバイス12aをZ軸方向に距離h’ずらして配置している。この位置検出装置を直線駆動装置に適用すると、直線駆動装置の可動子の位置を高精度に検出することができる。
図2には、多磁極列の真横(χ=0、h'=0)にセンサデバイス12aを配置する位置検出装置を示す。図2(b)は図2(a)のA−A断面図である。h'=0以外の構成は図1と同様である。ただし、この配置では、センサデバイスの感磁面内において、磁極の配列方向(多磁極列方向)に沿った磁束密度成分の振幅の大きさと磁極の配列方向に直交する磁束密度成分の振幅の大きさとが等しくないので、センサデバイスを平行移動させてその位置を求めても、直線変位量の誤差が大きい。
図3には、多磁極列の横(χ≠0、h'=0)にセンサデバイス12aを配置する位置検出装置を示す。図3(b)は図3(a)のA−A断面図である。固定子の厚み中心点を通り且つ多磁極列面に直交する平面に対してセンサデバイス12aの感磁面をχ傾けている以外の構成は、図1と同様である。ただし、センサデバイスの感磁面内において、磁極の配列方向(多磁極列方向)に沿った磁束密度成分の振幅の大きさと磁極の配列方向に直交する磁束密度成分の振幅の大きさとがほぼ等しいので、直線変位量の誤差は実施形態1と同程度に抑制することができる。
図4には、図2の構成に更にセンサデバイス12bを加入している位置検出装置を示す。第1のセンサデバイス12aに対して感磁面の中心同士がλ/4離隔するように第2のセンサデバイス12bを配置すると2つのセンサデバイスを一体で平行移動させる以外は図2と同様である。2つのセンサデバイスの出力を合成する際に誤差成分が相殺されるので、比較形態よりも直線変位量の誤差を小さくすることができる。
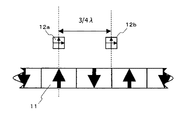
図5には、固定子11に対するセンサデバイス12aの位置を検出する他の位置検出装置を示す。第1のセンサデバイス12aに対して感磁面の中心同士が3λ/4離隔するように第2のセンサデバイス12bを配置する以外は図4と同様である。直線移動に係る変位量検出の場合は、2つのセンサデバイスの位置関係(感磁面の中心同士の位置関係)は、λ/4±nλ/2で規定される。そのため、図5のように第2のセンサデバイスを3λ/4離れた位置に配置しても同様の効果を得ることができる。
図5の構成について、さらに各々のセンサデバイス12a,12bを共にz軸方向にh’平行移動させたところ、図1の直線変位量の誤差を更に抑える変位検出装置を得る。
図5の構成について、さらに各々のセンサデバイス12a,12bを共に図3のようにχ傾斜させたところ、図5と同等のレベルに直線変位量の誤差を抑える変位検出装置を得る。
図6には、固定子の多磁極列と、可動子のセンサデバイスの位置関係の例を示す。図6(a)は図1〜5の(a)と同様に位置検出装置の上面図であり、図6(b)は(a)のA−A断面図に相当する。(a)において太い矢印は1つのブロック毎の着磁方向を表わし、曲線状の細い矢印は磁力線を表わす。図6(b)は2通りのセンサデバイス12a’’、及びセンサデバイス12a’’の配置を示すものである。センサデバイス12a’は、h’=0のX−Y平面上にセンサデバイスの感磁面の中心を配置し、その感磁面をX−Y平面に対してセンサ傾斜角χだけ傾けている。センサデバイス12a’’は、センサ配置角φ'の位置にあり、X−Y平面に対してχ'傾けている。センサデバイス12a’’の中心は、固定子11の厚み中心点を通りかつ多磁極列方向に垂直な平面(X−Y平面に平行な面)からZ軸方向にh’離れている。センサデバイス12a’’の位置において、磁束の方向はX軸からε'傾いている。固定子の磁石の厚みtはZ軸方向の寸法である。固定子11の厚み中心点は、固定子のX−Y断面中央とZ軸断面の中央が交差する点であり、XYZ軸の原点に相当する。なお、図6の磁石とセンサデバイスの相対的位置関係は、基本的には図9でセンサデバイスをZ軸方向にずらして配置する構成と同様であるが、磁石の回転中心が存在しないため、センサ配置角φの基準は、磁石のX軸の中心とZ方向の中心と見なす。
図7の(a)には、固定子40の多磁極列方向に沿って、可動子49を平行移動させる直線駆動装置を断面図(X−Y断面図)で示す。固定子40は、NdFeB系焼結型永久磁石で構成したリング磁石41を多段に積み重ねて、そのリングの貫通孔に非磁性のシャフト42を装着している。隣り合うリング磁石同士はY方向で着磁方向(太矢印)が逆になるように多磁極列を構成する。個々のリング磁石の着磁方向はリング磁石の軸方向に相当する。可動子49は、磁界を発生する駆動円筒部と、センサデバイスを有する検知円筒部を備える。前記駆動円筒部は、軟磁性のヨーク43に励磁用の巻線のコイル44を設けている。コイルに流す励磁用電流とそれによる磁界を制御することで、可動子49を駆動又は停止させる。
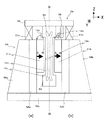
図8には、固定子50の多磁極列方向(Y方向)に沿って、可動子59を平行移動させる他の直線駆動装置を断面図(X−Z断面図)で示す。固定子50は、軟磁性の側板ヨーク52a,52b及び基板ヨーク52cで構成されるコの字型のヨークと、側板ヨークの内側に各々固着された磁石列51a及び52bと、前記側板ヨーク及び基板ヨークを固定する強度を高める為の補強部材58a及び58bを備え、ヨークと磁石で磁気回路を為す。可動子59は、励磁用のコイル54とそれを支持する枠体53及びテーブル56と、前記テーブル56を固定子50に対してY方向で移動可能に支持するガイド部57a及び57bと、センサデバイス12a及び12bとを備える。前記センサデバイス12aは枠体53の面に直接固定され、センサデバイス12bは支持基板55を介してテーブル56に支持されている。
B−B線の左側と右側では、別々の態様を図示している。左側の構成は、磁極よりの領域の磁界を検知し、センサデバイスの感磁面に対して磁力線が傾斜するように配置している。右側の構成は、磁極中間の領域の磁界を検知し、磁力線に対してセンサデバイスの感磁面が傾斜するように配置している。双方の構成について、センサデバイスの感磁面内において、磁極の配列方向(多磁極列方向)に沿った磁束密度成分の振幅の大きさと磁極の配列方向に直交する磁束密度成分の振幅の大きさとが等しくなるように、センサデバイスを配置している。
回転方向に2N極(Nは自然数)を有する磁石回転子について、本発明の回転角度検出装置の角度検出原理を説明する。この磁石回転子はN極対の磁石を有していると言い換えることができ、N回の軸対称性を有している。ある基準角の機械角θmは電気角θelによって式(1)で表される。特に、2極(N=1)の場合は式(2)で表され、電気角と機械角が等しくなる。
前述の原理による磁気センサを実現するためのエレメント(素子)として、スピンバルブ型巨大磁気抵抗効果素子がある。磁気抵抗効果素子は磁場を感知してその抵抗値が変化するエレメント(素子)であり、通常はエレメント(素子)の異方性方向の磁場成分を一次元的に検知するように使用される。エレメント(素子)を回転磁場中に入れた場合の抵抗変化に着目している。回転磁場に対してcosα(αは固定層の磁化と自由層の磁化とのなす角)の抵抗変化をするエレメント(素子)、符号が逆の(−COSα)の抵抗変化をするエレメント(素子)、又はそれらを組み合わせた素子対を用いる。直流電圧印加時に、COSαに比例する電圧を出力するエレメント(素子)を適用することにより、式(5)に示すようにRresが出力される。式(5)において、δは抵抗変化率である。
逆正接演算により回転角度を表す角度信号を得るには、サイン信号とコサイン信号の2信号が必要である。センサブリッジX01とセンサブリッジY01の出力は、それぞれの信号がコサイン信号とサイン信号に対応しており、この2個のセンサブリッジのみでも回転角度出力を得ることは可能である。しかし、上述の式(3)にあるように、磁石回転子からの磁束密度は必ずしも基本波成分のみではなく、高調波を含んでいる。また、式(9−1)〜(9−2)に示すように、傾き角χや、軸ずらし量hをセンサデバイスに設けない場合は、センサデバイスの設置位置における半径方向と回転方向の磁束密度が異なることから、さらに出力信号は高調波を含むこととなる。すなわち、磁石回転子の近傍でセンサデバイスの出力を測定する場合、磁石回転子の回転角度を横軸に、センサデバイスの出力を縦軸にとった場合、固定層磁化方向が半径方向を向いているセンサブリッジの出力は台形波状(sinカーブが台形的に歪んだ波形)となり、固定層磁化方向が回転方向を向いているセンサブリッジの出力は三角波状(sinカーブが三角形的に歪んだ波形)になる。このため、電気角で90deg.離れた位置に設置した第2のセンサデバイスからの出力X02とY02を加えることで基本波成分を増加させ、かつ高調波成分を相殺して減少させることが可能になる。このような信号処理により、角度信号の誤差をより低減することができる。第1のセンサデバイスと第2のセンサデバイスは必ずしも電気角で90deg.の隣接個所に設置する必要はない。例えば、第1のセンサデバイス12aから、第2のセンサデバイス12bが電気角で90deg.+180deg.離れた位置に設置された場合、センサブリッジX01の出力を基準にして、それぞれのセンサブリッジの出力のを基本波は式(16−1)〜(16−4)で表される。
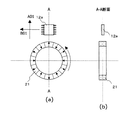
参考形態1として、多極の磁石回転子21と1つのセンサデバイス12aを用いて構成する回転角度検出装置を図9(a)及び図9(b)に示す。図9(b)は図9(a)のA−A断面図である。磁石回転子21の内周面側にはシャフトを通して固定しているが、図示は省略する。センサデバイスはセンサ傾斜角χ=0、h=0で配置する。参考形態2として、図10はセンサ傾斜角χ傾けてセンサデバイスを配置する以外、図9に示す回転角度検出装置と同様に構成する。
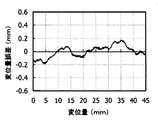
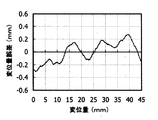
図14には、実施形態1の構成において、λ=45mm、r1=6mm、h’=6mmとして、センサデバイス12aを平行移動させたときの変位量と変位量誤差の関係を示す。センサデバイスの直線変位量の誤差は後述の比較例に比べて約1/7に低減できた。
図15には、比較形態の構成において、h’=0mmとした以外は、実施例1と同様の条件として、センサデバイス12aを平行移動させたときの変位量と変位量誤差の関係を示す。直線変位量の誤差は±1.5mmを超えており、高い精度で変位量を測定することは難しかった。
図16には、実施形態3の構成において、λ=45mm(即ち、感磁面の中心同士の距離λ/4は11.25mmである。)、r1=6mm、h’=0mm、χ=0mmとして、センサデバイス12a及び12bを一体として平行移動させたときの変位量と変位量誤差の関係を示す。センサデバイスの直線変位量の誤差は、比較例が±1.7mm程度であるのに比べて、実施例2は±0.3mm以下に低減できた。2個のセンサデバイスを用いることによる精度改善できることがわかる。
実施形態3の2つのセンサデバイスの相対的位置関係は変更せず、両方ともh'=6mmとして同様の実験を行ったところ、更なる精度改善が確認された。
参考形態1において磁石回転子外周からセンサデバイス中心までの距離を約3mmとし、参考形態2においてセンサ傾斜角χ=55deg.とした。磁石回転子21は12極着磁とした為に、機械角で360deg.回転すると6周期の出力が得られた。この場合、機械角が60deg.で電気角の1周期となる。得られたデータを、図17に(a)機械角とセンサ出力のグラフ、(b)機械角に対する検出角度と電気角誤差のグラフ、及び(c)前記(b)を一部拡大したグラフとして示す。歪み具合に差はあるが、センサブリッジX01が台形波、センサブリッジY01が三角波となっており、電気角1周期あたりの角度誤差は±10deg.以上と非常に大きな値をであった。一方、参考形態2を実施して得られたデータを、図18のグラフ(a)〜(c)に示す。各センサブリッジからの出力はほぼ正弦波及びほぼ余弦波となり、電気角の角度誤差は±3deg.程度となり、大きな角度誤差の改善が見られた。この回転角度検出装置をモータに適用し回転角度を高精度に検出することができた。
12a’:センサデバイス、 12a’’:センサデバイス、
22a,22b,22c,22d:スピンバルブ型巨大磁気抵抗効果素子、
23:端子、 26a,26b,26c,26d,26e,26f:オペアンプ、
27:A−D変換部、 28:位置演算部、
40:固定子、 41:リング磁石、 41b:円柱磁石、 42:シャフト、
43:ヨーク、44:コイル、 45a,45b:非磁性部、
46:非磁性部、 47:基準磁極、 48:基準レール 49:可動子、
50:固定子、 51:磁石列、
52a,52b:側板ヨーク、 52c:基板ヨーク、 53:枠体、 54:コイル、
55:支持基板、 56:テーブル、 57a,57b:ガイド部、
58a,58b:補強部材、 59:可動子
Claims (6)
- 多磁極列を表面に有する固定子と、前記固定子の磁極列面に対して平行移動すると共に前記固定子からの磁束の向きを検知する第1のセンサデバイス及び第2のセンサデバイスとを備えた位置検出装置であって、
前記第1のセンサデバイスは、互いに固定層磁化方向が直交するセンサブリッジX01とセンサブリッジY01とを内蔵し、
前記第2のセンサデバイスは、互いに固定層磁化方向が直交するセンサブリッジX02とセンサブリッジY02とを内蔵し、
前記センサブリッジX01,Y01,X02及びY02は、それぞれがスピンバルブ型巨大磁気抵抗効果素子(固定層と自由層を有し、固定層磁化方向が固定されており、自由層磁化方向が磁界の向きに応じて回転する磁気抵抗素子)のフルブリッジであり、
前記フルブリッジ中の隣り合う辺のスピンバルブ型巨大磁気抵抗効果素子の固定層磁化方向が反平行であり、
前記センサブリッジY01及びセンサブリッジY02は固定層磁化方向が前記固定子の多磁極列の方向に沿うように配置されており、
前記センサブリッジX01の固定層及びセンサブリッジX02の固定層は、λ/4のピッチ、又はλ/4±nλ/2のピッチで配置されており、λは多磁極列の同極性の磁極のピッチであり、nは整数であり、
前記フルブリッジのそれぞれに電圧を印加することにより、前記固定層磁化方向と前記自由層磁化方向とのなす角度に応じた4つの出力を得て、前記4つの出力を差動増幅器を介して2つの出力信号に変換し、前記2つの出力信号を基にして位置信号を得ることを特徴とする位置検出装置。 - 前記センサブリッジX01、Y01、X02、及びY02の固定層磁化方向を含む平面が、前記固定子の多磁極列面の厚み中心点を通りかつ多磁極列面に垂直な平面に対して傾いていることを特徴とする請求項1に記載の位置検出装置。
- 前記第1のセンサデバイス及び前記第2のセンサデバイスの中心は、前記固定子の多磁極列面の厚み中心点を通りかつ多磁極列面に垂直な平面から、固定子の多磁極列面の厚さ方向に離れていることを特徴とする請求項1に記載の位置検出装置。
- 前記差動増幅器として、前記センサブリッジX01の出力を差動増幅する第1の差動増幅器と、前記センサブリッジY01の出力を差動増幅する第2の差動増幅器と、前記センサブリッジX02の出力を差動反転増幅する第3の差動増幅器と、前記センサブリッジY02の出力を差動増幅する第4の差動増幅器と、前記第1および第4の差動増幅器の出力を差動増幅する第5の差動増幅器と、前記第2および第3の差動増幅器の出力を差動増幅する第6の差動増幅器とを有し、
前記2つの信号出力として得た第5および第6の差動増幅器の出力を逆正接演算するための演算部を有することを特徴とする請求項1ないし3のいずれかに記載の位置検出装置。 - 前記第5および第6の差動増幅器と前記演算部との間にA−D変換部を有することを特徴とする請求項4に記載の位置検出装置。
- 請求項1ないし5のいずれかに記載の位置検出装置に、前記固定子の多磁極列面に対向する可動コイルを設けることを特徴とする直線駆動装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011208431A JP5201493B2 (ja) | 2011-09-26 | 2011-09-26 | 位置検出装置及び直線駆動装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011208431A JP5201493B2 (ja) | 2011-09-26 | 2011-09-26 | 位置検出装置及び直線駆動装置 |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008129108A Division JP4900838B2 (ja) | 2008-05-16 | 2008-05-16 | 位置検出装置及び直線駆動装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2011257432A JP2011257432A (ja) | 2011-12-22 |
| JP5201493B2 true JP5201493B2 (ja) | 2013-06-05 |
Family
ID=45473707
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011208431A Expired - Fee Related JP5201493B2 (ja) | 2011-09-26 | 2011-09-26 | 位置検出装置及び直線駆動装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5201493B2 (ja) |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014202704A (ja) * | 2013-04-09 | 2014-10-27 | 三菱電機株式会社 | 磁界検出装置 |
| JP6107589B2 (ja) * | 2013-10-15 | 2017-04-05 | 株式会社デンソー | 回転角センサ |
| CN106104211B (zh) * | 2014-03-14 | 2018-11-13 | 三菱电机株式会社 | 磁力式位置检测装置、磁力式位置检测方法 |
| JP2018013391A (ja) | 2016-07-20 | 2018-01-25 | メレキシス テクノロジーズ エス エー | 変位検出装置 |
| JP6934708B2 (ja) | 2016-07-20 | 2021-09-15 | メレキシス テクノロジーズ エス エーMelexis Technologies SA | 変位検出装置 |
| CN109473249B (zh) * | 2018-11-08 | 2021-06-04 | 中国工程物理研究院电子工程研究所 | 具备高电磁作用力的微电磁执行器 |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3655897B2 (ja) * | 2002-08-07 | 2005-06-02 | 三菱電機株式会社 | 磁気検出装置 |
| JP4582298B2 (ja) * | 2004-07-08 | 2010-11-17 | Tdk株式会社 | 磁気式位置検出装置 |
| JP2006317203A (ja) * | 2005-05-11 | 2006-11-24 | Alps Electric Co Ltd | センサモジュール及びそれを用いた角度検出装置 |
-
2011
- 2011-09-26 JP JP2011208431A patent/JP5201493B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2011257432A (ja) | 2011-12-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4324813B2 (ja) | 回転角度検出装置及び回転機 | |
| JP5120384B2 (ja) | 回転角度検出装置、回転機及び回転角度検出方法 | |
| JP4900838B2 (ja) | 位置検出装置及び直線駆動装置 | |
| TWI579533B (zh) | Absolute encoder devices and motors | |
| JP5201493B2 (ja) | 位置検出装置及び直線駆動装置 | |
| GB2505226A (en) | Arrangement, method and sensor for measuring an absolute angular position using a multi-pole magnet | |
| US8928313B2 (en) | Magnetic encoder with improved resolution | |
| JP5187538B2 (ja) | 磁気センサ | |
| JP4319153B2 (ja) | 磁気センサ | |
| JP7242352B2 (ja) | 回転部材の少なくとも1つの回転パラメータを決定するためのシステム | |
| US20130293220A1 (en) | Methods and apparatus for magnetic sensors having highly uniform magnetic fields | |
| JP2013234939A (ja) | 磁気検出装置及び磁気エンコーダ | |
| CN108027256A (zh) | 直动旋转检测器 | |
| JP5455761B2 (ja) | 磁気式回転角検出器 | |
| EP4235108B1 (en) | Magnetic position sensor system with high accuracy | |
| JP2021071350A (ja) | 位置検出装置 | |
| EP2722649A2 (en) | Magnetic encoder | |
| JP2005172441A (ja) | 角度および角速度一体型検出装置 | |
| JP2008298632A (ja) | 回転角検出装置および回転角検出方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110927 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20121101 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130118 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130131 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5201493 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20160222 Year of fee payment: 3 |
|
| LAPS | Cancellation because of no payment of annual fees |