JP5241147B2 - 不要信号抑圧装置 - Google Patents
不要信号抑圧装置 Download PDFInfo
- Publication number
- JP5241147B2 JP5241147B2 JP2007149543A JP2007149543A JP5241147B2 JP 5241147 B2 JP5241147 B2 JP 5241147B2 JP 2007149543 A JP2007149543 A JP 2007149543A JP 2007149543 A JP2007149543 A JP 2007149543A JP 5241147 B2 JP5241147 B2 JP 5241147B2
- Authority
- JP
- Japan
- Prior art keywords
- signal
- frequency
- clutter
- phase detector
- unnecessary
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images






Landscapes
- Radar Systems Or Details Thereof (AREA)
Description
また、航空機搭載レーダにおける地上の移動目標検出には、航空機側方に配置された2つのアンテナを用いたDPCA方式(DPCA:Displaced Phase Center Antenna)が使われることもある(例えば、非特許文献1参照)。
図1は、この発明に係る実施の形態1による不要信号抑圧装置が適用される状況を示す図である。
図1の座標系は地面または海面を基準にし、xy平面を地面または海面に合わす。z軸の正の方向は地面または海面からの高さを示す方向である。z軸上のある高さに移動体、例えば航空機があり、航空機はx軸の正の方向にx軸と平行に速さvで移動している。
航空機にはレーダが搭載され、航空機側方にアレーアンテナ11が備えられている。アレーアンテナ11は、等間隔dで直線上に配置されたN個の素子アンテナ1−n(n=1、2、・・・、N)から構成されている。なお、個々の素子アンテナ1−nは、複数の小型アンテナから構成されていても良い。素子アンテナ1−nには、図1の右側から順に1、2、・・・、Nの番号が付番されている。
レーダは航空機の側方のやや斜め下を観測し、地面または海面上に存在する移動体を移動目標として検出する。なお、移動目標は地面または海面から任意の高さに存在しても良い。
この発明に係る実施の形態1による不要信号抑圧装置は、N個の素子アンテナ1−nから構成されるアレーアンテナ11、アレーアンテナ11で受信された反射信号(以下、「受信信号」と称す)を増幅し中間周波数の中間周波信号に変換するN個の受信機2−n、アナログの中間周波信号をディジタルの中間周波信号に変換するN個のA/D変換器3−n、ディジタルの中間周波信号からディジタル同相信号(I信号)と直交信号(Q信号)を検波するN個の位相検波器4−nを備える。
受信機2−nは、素子アンテナ1−nで受信された高周波信号を増幅し、且つ中間周波数へ変換する。
A/D変換器3−nは、受信機2−nの出力である中間周波信号をサンプリング・ディジタル化して、時間離散化されたディジタル中間周波信号を出力する。
位相検波器4−nは、ディジタル中間周波信号からディジタル同相信号(I信号)とディジタル直交信号(Q信号)信号とを検波する。このディジタル同相信号とディジタル直交信号が位相検波器出力信号u(m,n,k)であり、位相検波器出力信号u(m,n,k)を、実部が同相信号、虚部が直交信号の複素信号として扱う。なお、受信した反射信号からディジタル同相信号およびディジタル直交信号への変換は、アナログの同相信号およびアナログの直交信号を生成してそれをA/D変換するようにしても良い。
荷重係数器13は、位相検波器出力信号または位相検波器出力信号が遅延された信号に荷重係数wl,n,kを乗算して不要信号成分を抑圧する。
なお、図2では荷重係数器13の出力に加算器14があり、その出力を加算器15で加算する構成となっているが、荷重係数器13のすべての出力を直接加算器15で加算しても良い。

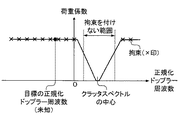
図3は、正規化ドップラー周波数f1−正規化空間周波数f2平面(以下、「時空間周波数平面」と称す)上に、図1のような側方斜め下観測の場合の地面または海面からのクラッタの時空間周波数分布、および拘束を付ける時空間周波数(図3の×印)の例を示したものである。
正規化ドップラー周波数f1とは、ドップラー周波数をパルス繰り返し周期(PRI)の逆数であるパルス繰り返し周波数(PRF)で正規化したものである。
正規化空間周波数f2とは、空間周波数(1/λ)sinθを素子アンテナ1−nの配置間隔dの逆数で正規化したものである。但し、λは送信する搬送波の波長、θは図1に示すように、アレーアンテナ11の正面方向に対する入射角である。
行列Cは、式(9)で表すように、ベクトルcq(q=1、2、・・・、Q:Qは拘束式の数である)を要素とするLN×Qの行列である。cqは、式(10)で表すように、拘束を付ける時空間周波数(f1,q,(d/λ)sinθq)(θqは拘束を付ける角度)からなる1×LNの行ベクトルである。
ベクトルHは、式(11)で表すように、拘束を付ける時空間周波数に対する所望周波数応答値hqからなるQ×1のベクトルである。Qは、図3の×印の数に対応する。前述したように、あらかじめ知ることができるクラッタの存在領域では拘束条件を付けない。行列CやベクトルHはレンジビン番号kに依らない。
図4のビーム中心におけるドップラー周波数に対する振幅特性を図5に示す。ビーム中心におけるクラッタスペクトルの中心付近で零点が形成される。なお、荷重係数ベクトルWkの計算の仕方は、式(7)だけとは限らず、最急降下法に基づく繰り返し計算によるものでもよい。
実施の形態1では、予め知ることのできる量から主ビーム内のクラッタのスペクトル分布を推定して、その領域において拘束を付けないようにした上で、拘束付出力電力最小化法を適用して荷重係数を計算した。
(参考文献2)深尾昌一郎著、外1名、「気象と大気のリモートセンシング」、京都大学学術出版会、2005年、p.125
Claims (2)
- 移動体に搭載され、レーダの送信アンテナから空中に放射された高周波信号に係り且つ一直線上に等間隔に配置された複数個の素子アンテナにより受信された反射信号に含まれる不要信号成分を抑圧する不要信号抑圧装置において、
上記反射信号を増幅して中間周波数の中間周波信号に変換する複数個の受信機と、
上記中間周波信号から同相信号と直交信号を検波する位相検波器と、
上記反射信号を受信する方向におけるクラッタのドップラー周波数を拘束から外すような拘束条件下で、上記高周波信号を搬送する搬送波の波長、上記素子アンテナの配置間隔、上記レーダが搭載された移動体の速さ、および上記高周波信号のパルス繰返し周期に基づいて、上記不要信号成分を抑圧する荷重係数を計算する荷重計算部を備え、
上記荷重計算部は、上記クラッタが存在する領域を、上記拘束条件を付けない領域として、上記位相検波器の出力信号を用いるとともに、拘束付出力電力最小化法を採用して、正規化ドップラー周波数−正規化空間周波数平面上で上記荷重係数を計算し、
上記拘束条件を付けない領域の最小範囲は、
上記搬送波の波長λと、上記移動体の速さvと、上記位相検波器の出力信号のパルス繰り返し周期PRIと、上記反射信号のビーム方向θ 0 と、適切な利得を持つ幅θ B と、上記複数個の素子アンテナの間隔dとを用いて、
上記正規化ドップラー周波数f 1 に関しては、
2v・PRI・sin(θ 0 −0.5θ B )/λ≦f 1 ≦2v・PRI・sin(θ 0 +0.5θ B )/λ、
で表され、
上記正規化空間周波数f 2 に関しては、
d・sin(θ 0 −0.5θ B )/λ≦f 2 ≦d・sin(θ 0 +0.5θ B )/λ、
で表されることを特徴とする不要信号抑圧装置。 - 上記荷重係数を計算するために用いる信号は、上記受信された反射信号が低域通過ディジタルフィルタを通過した信号であることを特徴とする請求項1に記載の不要信号抑圧装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007149543A JP5241147B2 (ja) | 2007-06-05 | 2007-06-05 | 不要信号抑圧装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007149543A JP5241147B2 (ja) | 2007-06-05 | 2007-06-05 | 不要信号抑圧装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2008304219A JP2008304219A (ja) | 2008-12-18 |
| JP5241147B2 true JP5241147B2 (ja) | 2013-07-17 |
Family
ID=40233084
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2007149543A Expired - Fee Related JP5241147B2 (ja) | 2007-06-05 | 2007-06-05 | 不要信号抑圧装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5241147B2 (ja) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2011158430A (ja) * | 2010-02-03 | 2011-08-18 | Mitsubishi Electric Corp | 送受信ビーム形成装置 |
| JP2011185752A (ja) * | 2010-03-09 | 2011-09-22 | Mitsubishi Electric Corp | パルスレーダ装置 |
| KR101659865B1 (ko) * | 2016-04-26 | 2016-09-26 | 국방과학연구소 | 고도 측정 센서의 재밍 회피 장치 및 방법 |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS61184475A (ja) * | 1985-02-12 | 1986-08-18 | Mitsubishi Electric Corp | レ−ダ受信装置 |
| JP3009624B2 (ja) * | 1996-01-17 | 2000-02-14 | 株式会社エイ・ティ・アール光電波通信研究所 | ディジタルビーム形成装置のためのfir型ディジタルフィルタのフィルタ係数演算装置、ディジタルビーム形成装置のためのfir型ディジタルフィルタ及びディジタルビーム形成装置 |
| JP3437735B2 (ja) * | 1997-02-27 | 2003-08-18 | 株式会社東芝 | 移動目標検出レーダ装置 |
| JP4141604B2 (ja) * | 1999-11-05 | 2008-08-27 | 三菱電機株式会社 | 信号処理装置および信号処理方法 |
| JP2004138403A (ja) * | 2002-10-15 | 2004-05-13 | Mitsubishi Electric Corp | 信号処理装置及びディジタルフィルタ |
| JP2006208044A (ja) * | 2005-01-25 | 2006-08-10 | Mitsubishi Electric Corp | 不要波抑圧装置 |
-
2007
- 2007-06-05 JP JP2007149543A patent/JP5241147B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2008304219A (ja) | 2008-12-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN101226236B (zh) | 基于旁瓣约束的天波超视距雷达自适应干扰抑制方法 | |
| US7737892B2 (en) | Time delay beamformer and method of time delay beamforming | |
| WO2014199609A1 (ja) | レーダ装置 | |
| KR20060044285A (ko) | 위상 배열 방식 시스템용 잡음 억제 시스템 및 방법 | |
| JP2012181052A (ja) | 相関抑圧フィルタ、ウェイト算出方法、ウェイト算出装置、アダプティブアレーアンテナ及びレーダ装置 | |
| JPS6088375A (ja) | コヒアレントサイドロ−ブキヤンセラ | |
| Chen et al. | Implementation of an adaptive wideband digital array radar processor using subbanding for enhanced jamming cancellation | |
| JP6296907B2 (ja) | レーダ装置及びそのレーダ信号処理方法 | |
| JP4144195B2 (ja) | レーダ装置 | |
| JP5566261B2 (ja) | レーダ装置 | |
| JP2014044193A (ja) | クラッタ抑圧装置 | |
| JP4444057B2 (ja) | パルス圧縮処理装置 | |
| JP5241147B2 (ja) | 不要信号抑圧装置 | |
| JP5933245B2 (ja) | クラッタ抑圧装置 | |
| JP4141604B2 (ja) | 信号処理装置および信号処理方法 | |
| JP2010025576A (ja) | 波数推定装置 | |
| JP4444150B2 (ja) | フィルタ装置 | |
| CN115015868B (zh) | 一种空域降维子带聚焦宽带stap方法 | |
| JP2005151526A (ja) | 不要信号抑圧装置 | |
| Su et al. | Adaptive HF interference cancellation for sky wave over-the-horizon radar | |
| Ślesicka et al. | The performance of a linear STAP processor for radar signal processing | |
| WO2023144980A1 (ja) | レーダ装置 | |
| JP2005148051A (ja) | 不要信号抑圧装置 | |
| JP2010249535A (ja) | レーダ装置 | |
| JP2006258581A (ja) | レーダ信号処理装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20100323 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120403 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120427 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130305 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130402 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20160412 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |