JP5345010B2 - 編成搬送台車設備 - Google Patents
編成搬送台車設備 Download PDFInfo
- Publication number
- JP5345010B2 JP5345010B2 JP2009168335A JP2009168335A JP5345010B2 JP 5345010 B2 JP5345010 B2 JP 5345010B2 JP 2009168335 A JP2009168335 A JP 2009168335A JP 2009168335 A JP2009168335 A JP 2009168335A JP 5345010 B2 JP5345010 B2 JP 5345010B2
- Authority
- JP
- Japan
- Prior art keywords
- knitting
- master
- signal
- steering
- cart
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images












Landscapes
- Steering-Linkage Mechanisms And Four-Wheel Steering (AREA)
Description
複数の独立換向式の車輪装置と、操舵装置により操作された操舵角に基づいて各車輪装置を換向する目標舵角を求め前記各車輪装置を操舵する操舵コントローラとを備えた複数の台車により台車群を編成し、この編成した台車群のうち、1台を主動走行するマスタ台車とするとともに、残りをマスタ台車に従動走行するスレーブ台車として、編成した台車群により大型の運搬物を積載して運搬する編成搬送台車設備であって、
前記マスタ台車と各スレーブ台車にそれぞれ、データ送信を行う通信ケーブルを接続する複数の接続コネクタを設け、
前記マスタ台車および各スレーブ台車それぞれの前記操舵コントローラに、
前記通信ケーブルで接続された台車に対して、前記通信ケーブルを介して、一定周期で変化するヘルシー信号を送信する信号送信部と、
前記信号送信部により送信されたヘルシー信号を受信し、受信したヘルシー信号が前記一定周期以上変化しないとき送信先の台車の操舵コントローラに異常が発生したと判断する信号受信部と、
前記通信ケーブルが前記接続コネクタに接続されていることを検出する編成状態検出部と、
送信先の台車の操舵コントローラに異常が発生した時に前記信号受信部から出力されるCPU異常信号、または接続された前記接続コネクタから前記通信ケーブルが外れた時に前記編成状態検出部から出力されるコネクタ抜け検出信号を受信して、自身の台車の走行を非常停止する単独・編成モード制御部と、を具備したことを特徴とする。
編成状態検出部は、通信ケーブルが接続された接続コネクタを検出して、台車群を編成する台車の配置状態を判断するように構成されたことを特徴とする。
マスタ台車と各スレーブ台車にそれぞれ設けられる接続コネクタは、前後左右の4箇所であることを特徴とする。
[台車の基本構造]
まず、編成搬送の基本となる単独運転用の台車を図10〜図13を参照して説明する。
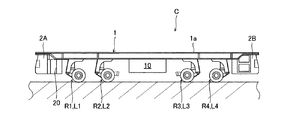
また台車本体1の底面部には、図10および図13に示すように、複数組、たとえば左右一対で前後に4組、合計8個の独立換向式の車輪装置R1〜R4,L1〜L4が設けられており、前記ステアリングホイール3により操舵コントローラ20を介して各車輪装置R1〜R4,L1〜L4を操舵するように構成されている。
マイクロコンピュータからなる操舵コントローラ20は、ステアリング操舵角検出器4により検出されるステアリング操舵角に応じて各車輪装置R1〜R4,L1〜L4を換向するスレーブ軸SSの目標舵角(スレーブ軸目標舵角)を求める操舵制御部20Aと、車輪装置R1〜R4,L1〜L4ごとに設けられステアリング指令(舵角指令値)を各車輪装置R1〜R4,L1〜L4に出力する舵角指令部20Bとから構成されている。
前記操舵制御部20Aは、マスタ軸目標舵角演算部21、旋回中心演算部22、およびスレーブ軸目標舵角演算部23から構成されている。
マスタ軸目標舵角演算部21には、前部運転席2Aおよび後部運転席2Bよりそれぞれ、ステアリング操舵角検出器4により検出されたステアリング操舵角、運転席選択スイッチ7の運転席の選択信号、および走行モード選択スイッチ6により選択された走行モードが入力されている。
マスタ軸目標舵角演算部21は、走行モード選択スイッチ6により直進(斜行)走行モードが選択されている場合、運転席選択スイッチ7により運転席2Aが選択されているとき、マスタ軸MS1を、台車本体1の幅方向の中心を通る車体中心軸CL上で前進方向の最前列の車輪装置R1,L1間に設定し、また運転席選択スイッチ7により運転席2Bが選択されているとき、マスタ軸MS2を、最後列の車輪装置R4,L4間に設定する。
旋回中心演算部22は、前記マスタ軸目標舵角θmに基づいて台車本体1の旋回中心OSを求める。
スレーブ軸目標舵角演算部23は、図13(b)(c)に示すように、旋回中心演算部22により求めた旋回中心OSに対して各車輪装置R1〜R4,L1〜L4のスレーブ軸SSが直角となるスレーブ軸目標舵角θe(車輪17が直進方向を向いている位置からの角度)をそれぞれ求める。
舵角指令部20Bは、図12に示すように、各車輪装置R1〜R4,L1〜L4毎にそれぞれ設けられた舵角指令値演算部24および舵角指令値出力部25から構成されている。
各舵角指令値演算部24は、対応する車輪装置R1〜R4,L1〜L4の前記スレーブ軸目標舵角と、対応する車輪装置R1〜R4,L1〜L4の舵角検出器19から出力される実舵角とに基づいて、車輪17を転舵させる舵角指令値を演算する。
各舵角指令値出力部25は、前記舵角指令値に基づいて油圧式のステアリングモータ18aを介して車輪17を転舵させるバルブ操作指令値を求めて、コントロールバルブ26にそれぞれ出力し、ステアリングモータ18aを所定量回転駆動して、対応する車輪装置R1〜R4,L1〜L4の車輪17を所定角度転舵させる。
次に本発明に係る編成搬送台車設備を図1〜図9に基づいて説明する。
複数の台車Cを所定位置に配置して大型の運搬物を積載し搬送する編成搬送は、図1に示すように、複数(図では2台)の台車Cのうち、特定の1台を主動走行するマスタ台車MCとし、残りをマスタ台車MCに従動走行するスレーブ台車SCとし、マスタ台車MCとスレーブ台車SCとを連動させて一体に走行させるものである。図1(a)は横編成状態、図1(b)は縦編成状態を示している。
マスタ台車MCおよびスレーブ台車SCの接続コネクタ32には、図3に示すように、マスタ台車MC側では編成操舵制御部20Cに接続され、スレーブ台車SC側では舵角指令部S20Bに接続される接続端子33Aと、編成状態検出部M20E,S20Eに接続される接続端子33B,33Cと、接地された接続端子33Dと、単独・編成モード制御部M20D,S20Dに接続される接続端子33Eと、マスタ台車MC側では信号送信部M20Fに接続され、スレーブ台車SC側では信号受信部S20Gに接続される接続端子33Fと、スレーブ台車SC側では信号送信部S20Fに接続され、マスタ台車MC側では信号受信部M20Gに接続される接続端子33Gが設けられている。
そして、これら接続端子33A,33B,33C,33D,33E,33F,33Gを有する接続コネクタ32に接続される通信ケーブル31のコネクタ34には、接続端子33Aに接続される接続端子35Aと、接続端子33Bに接続される接続端子35Bと、接続端子33C,33Dに接続され短絡された接続端子35C,35Dと、接続端子33Eに接続される接続端子35Eと、接続端子33Fに接続される接続端子35Fと、接続端子33Gに接続される接続端子35Gが設けられ、台車Cの接続コネクタ32と通信ケーブル31のコネクタ34が接続されると、接続端子33Cが接続される編成状態検出部M20E,S20Eの入力は、接続端子33C,35C,35D,33Dを介して接地され、編成状態検出部M20E,S20Eはどの接続コネクタ32に通信ケーブル31が接続されたかどうかを検出できる。スレーブ台車SCの編成状態検出部S20Eは、通信ケーブル31が接続された接続コネクタ32を検出すると、検出した接続コネクタ32の情報を通信ケーブル31および接続端子33B,35Bを介してマスタ台車MCの編成状態検出部M20Eへ出力している。
図1に示すように、マスタ台車MCおよびスレーブ台車SCの接続コネクタ32のうち、横編成状態では、マスタ台車MCは32FR、スレーブ台車SCは32FLが通信ケーブル31に接続され、縦編成状態では、マスタ台車MCは32BL、スレーブ台車SCは32FLに通信ケーブル31が接続されることが予め設定されている。
・コネクタ接続検出信号(4つの接続コネクタ32の一つの接続を検出したとき)
・編成運転・状態データ(編成状態を判断したとき)
・編成状態異常信号(編成状態が異常であると判断したとき)
・コネクタ抜け検出信号(4つの接続コネクタ32の一つの接続を検出した後、その接続が外れたことを検出したとき)
「信号送信部M20F,S20F、信号受信部M20G,S20G」
各信号送信部M20F,S20Fはそれぞれ、図4に示すように、1秒ON1秒OFFのパルス信号からなるヘルシー信号(一定周期で変化する信号の一例)を出力するように構成され、図2および図3に示すように、マスタ台車MCの信号送信部M20Fから出力されたヘルシー信号は、通信ケーブル31および接続端子33F,35Fを介して、スレーブ台車SCの信号受信部S20Gへ入力され、またスレーブ台車SCの信号送信部S20Fから出力されたヘルシー信号は、通信ケーブル31および接続端子33G,35Gを介して、マスタ台車MCの信号受信部M20Gへ入力される。
上記両台車Cの単独・編成モード制御部M20D,S20Dには、図5および図6に示すように、編成状態検出部M20E,S20Eからの単独運転信号、コネクタ接続検出信号、編成運転・状態データ、編成状態異常信号およびコネクタ抜け検出信号、各信号受信部M20G,S20GからのCPU異常信号、前部運転席2Aおよび後部運転席2Bからのステアリング操舵角検出器4により検出されたステアリング操舵角、運転席選択スイッチ7の運転席の選択信号、および走行モード選択スイッチ6により選択された走行モードが入力されている。
単独・編成モード制御部M20D,S20Dはそれぞれ表示画面28と接続され、画像表示部41により台車Cの編成状態を表示するようにしている。
マスタ台車MCの単独・編成モード制御部M20Dの編成運転部M42は、単独運転信号がOFF、且つコネクタ接続検出信号がON、且つCPU異常信号がOFFのときにセットされ、編成状態異常信号がON、またはコネクタ抜け検出信号がON、またはCPU異常信号がONであり、且つ編成運転信号がONのときにリセットされるRSフリップフロップから構成され、セットされたときに編成運転信号を出力する。また編成状態異常信号がON、またはコネクタ抜け検出信号がON、またはCPU異常信号がONであり、且つ編成運転信号がONのときに非常停止信号を出力する。
スレーブ台車SCの単独・編成モード制御部S20Dの編成運転部S44は、編成状態異常信号がON、またはコネクタ抜け検出信号がON、またはCPU異常信号がONであり、且つマスタ台車MCの単独・編成モード制御部M20Dから送信されてくる編成運転信号がONのときに非常停止信号を出力する。
マスタ台車MCの単独・編成モード制御部M20Dの単独転送部43は、編成運転部42から出力される編成運転信号がOFFのとき、スレーブ台車SCの単独・編成モード制御部のS20Dの単独転送部43は、マスタ台車MCの単独・編成モード制御部M20D(編成運転部42)から送信されてくる編成運転信号がOFFのとき、すなわち単独運転モードのとき、それぞれ操舵制御部M20A,S20Aに対して、前部運転席2Aおよび後部運転席2Bよりそれぞれ入力した、ステアリング操舵角検出器4により検出されたステアリング操舵角、運転席選択スイッチ7の運転席の選択信号、および走行モード選択スイッチ6により選択された走行モードを出力する。
マスタ台車MCの単独・編成モード制御部M20Dの編成転送部M44は、編成運転部42から出力される編成運転信号がONのとき、すなわち編成運転モードのとき、編成操舵制御部20Cに対して、次のデータを出力する。
・マスタ台車MCの前部運転席2Aおよび後部運転席2Bよりそれぞれ入力した、ステアリング操舵角検出器4により検出されたステアリング操舵角、運転席選択スイッチ7の運転席の選択信号、および走行モード選択スイッチ6により選択された走行モード。
マスタ台車MCの単独・編成モード制御部M20Dのスレーブ転送部M45は、編成運転部M42より出力される編成運転信号と、走行操作レバーの操作位置のデータを、通信ケーブル31および接続端子33E,35Eを介してスレーブ台車SCの単独・編成モード制御部S20Dへ出力する。
スレーブ台車SCの単独・編成モード制御部S20Dのマスタ転送部S45は、マスタ台車MCの編成運転部42から送信されてくる編成運転信号がON、すなわち編成運転モードのとき、通信ケーブル31および接続端子33E,35Eを介して、マスタ台車MCの単独・編成モード制御部M20Dに対して、次のデータを出力する。
上記編成操舵制御部20Cの構成について詳細に説明する。
編成操舵制御部20Cは、図2に示すように、操舵制御部20Aと同様に、マスタ軸目標舵角演算部(以下、編成マスタ軸目標舵角演算部と称す)51、旋回中心演算部(以下、編成旋回中心演算部と称す)52、およびスレーブ軸目標舵角演算部(以下、編成スレーブ軸目標舵角演算部と称す)53から構成されている。
編成マスタ軸目標舵角演算部51には、単独・編成モード制御部M20Dより、上記ステアリング操舵角、運転席の選択信号、走行モード、および編成状態(データ)が入力され、まず走行モードおよび編成状態によりマスタ軸(以下、編成マスタ軸と称す)MSを設定する。
編成旋回中心演算部52は、前記マスタ軸目標舵角θmに基づいて台車本体1の旋回中心OSを求める。
編成スレーブ軸目標舵角演算部53は、図8(a)(b)および図9(a)(b)に示すように、編成旋回中心演算部52により求めた旋回中心OSに対して各車輪装置MR1〜MR4,ML1〜ML4,SR1〜SR4,SL1〜SL4のスレーブ軸SSが直角となるスレーブ軸目標舵角をそれぞれ求める。
マスタ台車MCの上記走行制御系は上記非常停止信号を入力すると、車輪装置MR1〜MR4,ML1〜ML4の各駆動モータ16を停止し、非常停止し、またスレーブ台車SCの上記走行制御系は上記非常停止信号を入力すると、車輪装置SR1〜SR4,SL1〜SL4の各駆動モータ16を停止し、非常停止する。
作業者は、運搬する運搬物により、台車Cが1台で運搬できるかどうか判断し、運搬できないと判断すると、運搬物の形状により、横編成状態とするのか、縦編成状態するのかを選択する。今、縦編成状態を選択したとする。
MC マスタ台車
SC スレーブ台車
R1〜R4,L1〜L4,MR1〜MR4,ML1〜ML4,SR1〜SR4,SL1〜SL4 車輪装置
1 台車本体
2A 前部運転席
2B 後部運転席
3 ステアリングホイール
4 ステアリング操舵角検出器
6 走行モード選択スイッチ
7 運転席選択スイッチ
17 車輪
18a ステアリングモータ
19 舵角検出器
20 操舵コントローラ
20A 操舵制御部
20B 舵角指令部
20C 編成操舵制御部
20D 単独・編成モード制御部
20E 編成状態検出部
20F 信号送信部
20G 信号受信部
21 マスタ軸目標舵角演算部
22 旋回中心演算部
23 スレーブ軸目標舵角演算部
24 舵角指令値演算部
25 舵角指令値出力部
28 表示画面
29 警報ランプ
31 通信ケーブル
32,34 接続コネクタ
51 編成マスタ軸目標舵角演算部
52 編成旋回中心演算部
53 編成スレーブ軸目標舵角演算部
Claims (3)
- 複数の独立換向式の車輪装置と、操舵装置により操作された操舵角に基づいて各車輪装置を換向する目標舵角を求め前記各車輪装置を操舵する操舵コントローラとを備えた複数の台車により台車群を編成し、この編成した台車群のうち、1台を主動走行するマスタ台車とするとともに、残りをマスタ台車に従動走行するスレーブ台車として、編成した台車群により大型の運搬物を積載して運搬する編成搬送台車設備であって、
前記マスタ台車と各スレーブ台車にそれぞれ、データ送信を行う通信ケーブルを接続する複数の接続コネクタを設け、
前記マスタ台車および各スレーブ台車それぞれの前記操舵コントローラに、
前記通信ケーブルで接続された台車に対して、前記通信ケーブルを介して、一定周期で変化するヘルシー信号を送信する信号送信部と、
前記信号送信部により送信されたヘルシー信号を受信し、受信したヘルシー信号が前記一定周期以上変化しないとき送信先の台車の操舵コントローラに異常が発生したと判断する信号受信部と、
前記通信ケーブルが前記接続コネクタに接続されていることを検出する編成状態検出部と、
送信先の台車の操舵コントローラに異常が発生した時に前記信号受信部から出力されるCPU異常信号、または接続された前記接続コネクタから前記通信ケーブルが外れた時に前記編成状態検出部から出力されるコネクタ抜け検出信号を受信して、自身の台車の走行を非常停止する単独・編成モード制御部と、を具備した
ことを特徴とする編成搬送台車設備。 - 編成状態検出部は、通信ケーブルが接続された接続コネクタを検出して、台車群を編成する台車の配置状態を判断するように構成された
ことを特徴とする請求項1に記載の編成搬送台車設備。 - マスタ台車と各スレーブ台車にそれぞれ設けられる接続コネクタは、前後左右の4箇所である
ことを特徴とする請求項1または2記載の編成搬送台車設備。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009168335A JP5345010B2 (ja) | 2009-07-17 | 2009-07-17 | 編成搬送台車設備 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009168335A JP5345010B2 (ja) | 2009-07-17 | 2009-07-17 | 編成搬送台車設備 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2011020592A JP2011020592A (ja) | 2011-02-03 |
| JP5345010B2 true JP5345010B2 (ja) | 2013-11-20 |
Family
ID=43631036
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2009168335A Active JP5345010B2 (ja) | 2009-07-17 | 2009-07-17 | 編成搬送台車設備 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5345010B2 (ja) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB2553327B (en) * | 2016-09-01 | 2021-11-03 | M Mover Holdings Ltd | An apparatus for transporting a load |
| GB2553326B (en) | 2016-09-01 | 2021-11-03 | M Mover Holdings Ltd | An apparatus for transporting a load |
| JP7824100B2 (ja) * | 2022-03-01 | 2026-03-04 | 日本車輌製造株式会社 | 重量物搬送車 |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS54153437A (en) * | 1978-05-24 | 1979-12-03 | Hitachi Ltd | Steering apparatus for trucks |
| JPS5682670A (en) * | 1979-12-04 | 1981-07-06 | Mitsubishi Heavy Ind Ltd | Steering system for plural wheels trackless vehicle |
| JPS62254545A (ja) * | 1986-04-28 | 1987-11-06 | Toshiba Corp | サイクリツク伝送装置 |
| JPH0879316A (ja) * | 1994-08-30 | 1996-03-22 | Nec Corp | 光入力断検出回路 |
| JP3457160B2 (ja) * | 1997-09-04 | 2003-10-14 | 日野自動車株式会社 | タイヤ空気圧警報装置 |
| JP5403968B2 (ja) * | 2008-08-01 | 2014-01-29 | ユニキャリア株式会社 | 編成搬送台車設備 |
-
2009
- 2009-07-17 JP JP2009168335A patent/JP5345010B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2011020592A (ja) | 2011-02-03 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US9701518B2 (en) | Method, apparatus and computer program for moving a container carrier | |
| US8214108B2 (en) | Vehicle system and method for selectively coupled vehicles | |
| CN104428192B (zh) | 用于车辆的转向系统以及车辆的转向方法 | |
| US9669868B2 (en) | Electric mobility | |
| CN103561986A (zh) | 用于控制连接到车辆的拖车的系统和方法 | |
| JP5345010B2 (ja) | 編成搬送台車設備 | |
| CN207631921U (zh) | 滚筒式自动搬运车 | |
| CN101920911B (zh) | 运输车的行走控制装置和方法及运输车 | |
| JP5403968B2 (ja) | 編成搬送台車設備 | |
| CN202694147U (zh) | 一种无人搬运小车及其驱动控制系统 | |
| JP5403967B2 (ja) | 編成搬送台車設備 | |
| JP6680518B2 (ja) | 車両の搬送方法 | |
| JP5312226B2 (ja) | 編成搬送台車設備 | |
| CN112394727A (zh) | 一种agv协作运输控制方法、存储介质和控制系统 | |
| CN202294610U (zh) | 用于全液压模块车中的并车系统 | |
| CN112978632A (zh) | 具有辅助对中设备的操作器车辆 | |
| JP4984330B2 (ja) | 搬送車システム | |
| WO2022038784A1 (ja) | 制御装置、配送システム及び制御方法 | |
| JP2022059320A (ja) | 無人搬送車 | |
| JP2014051246A (ja) | 連結型電動台車 | |
| KR20120056065A (ko) | 핀연결 무인자동운반대차 | |
| JP4152347B2 (ja) | 走行台車 | |
| JP7452367B2 (ja) | 電動式牽引車 | |
| JP6238052B2 (ja) | 牽引台車 | |
| JP4162628B2 (ja) | 重心表示装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20120614 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20120614 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20130531 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130604 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130627 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130716 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130813 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5345010 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313111 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| S533 | Written request for registration of change of name |
Free format text: JAPANESE INTERMEDIATE CODE: R313533 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R360 | Written notification for declining of transfer of rights |
Free format text: JAPANESE INTERMEDIATE CODE: R360 |
|
| R360 | Written notification for declining of transfer of rights |
Free format text: JAPANESE INTERMEDIATE CODE: R360 |
|
| R371 | Transfer withdrawn |
Free format text: JAPANESE INTERMEDIATE CODE: R371 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313111 |
|
| R371 | Transfer withdrawn |
Free format text: JAPANESE INTERMEDIATE CODE: R371 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313111 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |