JP5434736B2 - 位置検知プログラム、位置検知装置および位置検知方法 - Google Patents
位置検知プログラム、位置検知装置および位置検知方法 Download PDFInfo
- Publication number
- JP5434736B2 JP5434736B2 JP2010071066A JP2010071066A JP5434736B2 JP 5434736 B2 JP5434736 B2 JP 5434736B2 JP 2010071066 A JP2010071066 A JP 2010071066A JP 2010071066 A JP2010071066 A JP 2010071066A JP 5434736 B2 JP5434736 B2 JP 5434736B2
- Authority
- JP
- Japan
- Prior art keywords
- work
- position detection
- position information
- divided
- route
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images

















Landscapes
- Navigation (AREA)
- Position Fixing By Use Of Radio Waves (AREA)
Description
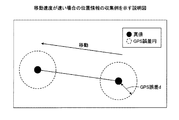
まず、図1に示したように、移動体110の移動経路から作業中の経路を抽出する。GPSから得られる移動経路の中から作業中の移動経路を抽出することによって、抽出されなかった移動経路は作業地を走行しないと判断されるため、一意的に一般の道路もしくは各作業地の間に設けられた通路を走行中であったと検知することができる。また、抽出された移動経路のみを対象として、いずれの作業地を走行しているかを検知するため、位置検知処理の効率化が期待できる。
図4は、移動経路の分割例を示す説明図である。図4に示すように、GPSから得られた移動体110の移動経路は、移動速度を利用して、移動速度が遅いデータ群Aと、移動速度が速いデータ群Bとに分けられる。本実施の形態ではデータ群Aが示す移動経路をさらに、移動距離に応じたブロックに分割して、ブロック単位でいずれの作業地に該当するかを検知する。図4の例では、データ群Aを破線で示した各ブロックに分割している。
(ただし、距離L>>GPS誤差d)
図7は、位置検知装置のハードウェア構成を示すブロック図である。図7において、位置検知装置100は、CPU(Central Processing Unit)701と、ROM(Read Only Memory)702と、RAM(Random Access Memory)703と、磁気ディスクドライブ704と、磁気ディスク705と、光ディスクドライブ706と、光ディスク707と、ディスプレイ708と、I/F(Interface)709と、キーボード710と、マウス711と、スキャナ712と、プリンタ713と、を備えている。また、各構成部はバス700によってそれぞれ接続されている。
図8−1は、位置検知装置の機能的構成を示すブロック図である。位置検知装置100は、位置情報入力部801と、位置検知部802と、地図情報DB(データベース)803と、を含む構成である。この制御部となる機能(位置情報入力部801〜位置検知部802)は、具体的には、たとえば、図7に示したROM702、RAM703、磁気ディスク705、光ディスク707などの記憶装置に記憶されたプログラムをCPU701に実行させることにより、または、I/F709により、その機能を実現する。また、地図情報DB803は、磁気ディスク705、光ディスク707や、I/F709を介して接続された外部の記憶装置によってその機能を実現する。
図9は、位置検知処理の手順を示すフローチャートである。図9のフローチャートは、位置検知部802に位置情報に基づいた移動経路が入力され、移動経路ごとに該当する作業地を決定するまでの手順を示している。図9の各処理を実行することによって、GPSの測位誤差の影響を排除した正確な位置検知を実現することができる。
また、図9のフローチャートでは、ステップS907において、作業地候補の中から分割された移動経路に含まれる位置情報の数が最多となる作業地を作業中の作業地に決定しているが、多数派となる作業地を決定する手法として下記に説明する位置検知例1〜5を採用してもよい。
図10は、平均座標を基準とした位置検知例を示す説明図である。位置検知例1では、分割した移動経路に含まれる位置情報が示す作業地の多数派を求める手法として、位置情報の平均座標から作業地を決定する。図10では、分割された移動経路の一例を示している。そして、平均座標Zは、分割された移動経路に含まれる位置情報が示す位置座標値の平均値を示している。
図11は、面積比を基準とした位置検知例を示す説明図である。位置検知例2では、分割された移動経路に含まれる位置情報を利用して作図した多角形の作業地候補ごとの面積比から作業地を決定する。
図12は、作業予定による重み付けを利用した位置検知例を示す説明図である。位置検知例3では、位置検知例2の手法を用いて面積比を算出する際に、あらかじめ取得した作業予定に基づいて重み付けを行う。すなわち、作業予定に設定されている時刻ごとに該当する作業地が多数派となるように所定の重み付けがなされる。
図14は、位置検知履歴による重み付けを利用した位置検知例を示す説明図である。位置検知例4では、位置検知例2の手法を用いて面積比を算出する際に、直前に分割された移動経路における位置検知結果に基づいて重み付けを行う。図14のように、移動体110の移動経路は所定の距離ごとに分割されたブロックごとにいずれの作業地によって作業しているのか検知している。
図15は、エリア定義による重み付けを利用した位置検知例を示す説明図である。位置検知例5では、位置検知例2の手法を用いて面積比を算出する際に、あらかじめ利用者によって地図情報に対して設定されたエリア定義に基づいて重み付けを行う。エリア定義とは、移動体110が走行する可能性の高い領域についての設定情報である。
図16は、位置検知結果の出力例を示すデータテーブルである。位置検知装置100は、分割された移動経路ごとの検知結果102をそのまま出力する他に、利用者が作業状況を把握し易いように編集した形式で出力してもよい。具体的には、誰が、何時、何処で、作業したかを即座に把握できるような位置検知結果を出力することができる。
作業地群の位置を特定する地図情報の中から、前記分割工程によって分割された移動経路に含まれる位置情報に該当する作業地候補を、前記分割された移動経路ごとに特定する特定工程と、
前記分割された移動経路に含まれている位置情報のうち、前記特定工程によって特定された前記作業地候補ごとに含まれている位置情報の数の多さに基づいて、前記作業地候補の中から前記分割された移動経路に該当する作業地を決定する決定工程と、
前記決定工程によって決定された決定結果を出力する出力工程と、
をコンピュータに実行させることを特徴とする位置検知プログラム。
前記移動体の移動経路の中から前記速度算出工程によって算出された移動速度がしきい値以下となる時間帯の移動経路を抽出する抽出工程と、を前記コンピュータに実行させ、
前記分割工程では、前記抽出工程によって抽出された移動経路を前記測位誤差幅よりも長い移動距離ごとに分割することを特徴とする付記1に記載の位置検知プログラム。
前記作図工程によって作図された多角形における前記作業地候補ごとの面積の割合を算出する面積算出工程と、を前記コンピュータに実行させ、
前記決定工程では、前記作業地候補の中から前記面積算出工程によって算出された面積の割合に基づいて、前記作業地候補の中から前記分割された移動経路に該当する作業地を決定することを特徴とする付記1〜5のいずれか一つに記載の位置検知プログラム。
前記面積算出工程では、前記多角形における前記作業地候補ごとの面積の割合を算出する際に、前記分割された移動経路に含まれる位置情報の測位時刻と前記取得工程によって取得された作業予定の時刻とが一致する作業地に対して所定の重みを付けることを特徴とする付記7に記載の位置検知プログラム。
前記面積算出工程は、前記多角形における前記作業地候補ごとの面積の割合を算出する際に、前記取得工程によって取得された設定情報によって定義された領域の作業地と同一の作業地に対して所定の重みを付けることを特徴とする付記7に記載の位置検知プログラム。
前記出力工程では、前記関連付け工程によって関連付けられた前記分割された移動経路と前記決定結果とを出力することを特徴とする付記1〜10のいずれか一つに記載の位置検知プログラム。
作業地群の位置を特定する地図情報の中から、前記分割手段によって分割された移動経路に含まれる位置情報に該当する作業地候補を、前記分割された移動経路ごとに特定する特定手段と、
前記分割された移動経路に含まれている位置情報のうち、前記特定手段によって特定された作業地候補ごとに含まれている位置情報の数の多さに基づいて、前記作業地候補の中から前記分割された移動経路に該当する作業地を決定する決定手段と、
前記決定手段によって決定された決定結果を出力する出力手段と、
を備えることを特徴とする位置検知装置。
前記分割手段によって、移動体の測位時刻ごとに得られた一連の位置情報により表現される前記移動体の移動経路を測位誤差幅よりも長い移動距離ごとに分割する分割工程と、
前記特定手段によって、作業地群の位置を特定する地図情報の中から、前記分割工程によって分割された移動経路に含まれる位置情報に該当する作業地候補を、前記分割された移動経路ごとに特定する特定工程と、
前記決定手段によって、前記分割された移動経路に含まれている位置情報のうち、前記特定工程によって特定された作業地候補ごとに含まれている位置情報の数の多さに基づいて、前記作業地候補の中から前記分割された移動経路に該当する作業地を決定する決定工程と、
前記出力手段によって、前記決定工程によって決定された決定結果を出力する出力工程と、
を実行することを特徴とする位置検知方法。
101 位置情報(GPS情報)
102 検知結果
110 移動体
800 位置情報収集部
801 位置情報入力部
802 位置検知部
803 地図情報DB(データベース)
811 分割部
812 特定部
813 決定部
814 出力部
815 速度算出部
816 抽出部
817 作図部
818 面積算出部
819 取得部
820 関連付け部
Claims (8)
- 移動体の測位時刻ごとに得られた一連の位置情報により表現される前記移動体の移動経路を測位誤差幅よりも長い移動距離ごとに分割する分割工程と、
作業地群の位置を特定する地図情報の中から、前記分割工程によって分割された移動経路に含まれる位置情報に該当する作業地候補を、前記分割された移動経路ごとに特定する特定工程と、
前記分割された移動経路に含まれている位置情報のうち、前記特定工程によって特定された前記作業地候補ごとに含まれている位置情報の数の多さに基づいて、前記作業地候補の中から前記分割された移動経路に該当する作業地を決定する決定工程と、
前記決定工程によって決定された決定結果を出力する出力工程と、
をコンピュータに実行させることを特徴とする位置検知プログラム。 - 前記位置情報と測位時刻とを用いて、前記移動体の測位時刻ごとの移動速度を算出する速度算出工程と、
前記移動体の移動経路の中から前記速度算出工程によって算出された移動速度がしきい値以下となる時間帯の移動経路を抽出する抽出工程と、を前記コンピュータに実行させ、
前記分割工程では、前記抽出された移動経路を、前記速度算出工程によって算出された移動速度に応じた数の一連の位置情報を含む移動経路ごとに分割することを特徴とする請求項1に記載の位置検知プログラム。 - 前記決定工程では、前記分割された移動経路に含まれている位置情報の平均値に該当する作業地候補を、前記分割された移動経路に該当する作業地に決定することを特徴とする請求項1または2に記載の位置検知プログラム。
- 前記分割された移動経路に含まれている位置情報が示す座標値を頂点とした凸包な多角形を作図する作図工程と、
前記作図工程によって作成された多角形における前記作業地候補ごとの面積の割合を算出する面積算出工程と、を前記コンピュータに実行させ、
前記決定工程では、前記作業地候補の中から前記面積算出工程によって算出された面積の割合に基づいて、前記作業地候補の中から前記分割された移動経路に該当する作業地を決定することを特徴とする請求項1または2に記載の位置検知プログラム。 - 前記移動体の時刻に応じた作業予定を取得する取得工程を前記コンピュータに実行させ、
前記面積算出工程では、前記多角形における前記作業地候補ごとの面積の割合を算出する際に、前記分割された移動経路に含まれる位置情報の測位時刻と前記取得工程によって取得された作業予定の時刻とが一致する作業地に対して所定の重みを付けることを特徴とする請求項4に記載の位置検知プログラム。 - 前記面積算出工程では、前記多角形における前記作業地候補ごとの面積の割合を算出する際に、前記分割された移動経路の直前の移動経路内の位置情報に該当する作業地と同一の作業地に対して所定の重みを付けることを特徴とする請求項4に記載の位置検知プログラム。
- 移動体の測位時刻ごとに得られた一連の位置情報により表現される前記移動体の移動経路を測位誤差幅よりも長い移動距離ごとに分割する分割手段と、
作業地群の位置を特定する地図情報の中から、前記分割手段によって分割された移動経路に含まれる位置情報に該当する作業地候補を、前記分割された移動経路ごとに特定する特定手段と、
前記分割された移動経路に含まれている位置情報のうち、前記特定手段によって特定された作業地候補ごとに含まれている位置情報の数の多さに基づいて、前記作業地候補の中から前記分割された移動経路に該当する作業地を決定する決定手段と、
前記決定手段によって決定された決定結果を出力する出力手段と、
を備えることを特徴とする位置検知装置。 - 分割手段と特定手段と決定手段と出力手段とを備えたコンピュータが、
前記分割手段によって、移動体の測位時刻ごとに得られた一連の位置情報により表現される前記移動体の移動経路を測位誤差幅よりも長い移動距離ごとに分割する分割工程と、
前記特定手段によって、作業地群の位置を特定する地図情報の中から、前記分割工程によって分割された移動経路に含まれる位置情報に該当する作業地候補を、前記分割された移動経路ごとに特定する特定工程と、
前記決定手段によって、前記分割された移動経路に含まれている位置情報のうち、前記特定工程によって特定された作業地候補ごとに含まれている位置情報の数の多さに基づいて、前記作業地候補の中から前記分割された移動経路に該当する作業地を決定する決定工程と、
前記出力手段によって、前記決定工程によって決定された決定結果を出力する出力工程と、
を実行することを特徴とする位置検知方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010071066A JP5434736B2 (ja) | 2010-03-25 | 2010-03-25 | 位置検知プログラム、位置検知装置および位置検知方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010071066A JP5434736B2 (ja) | 2010-03-25 | 2010-03-25 | 位置検知プログラム、位置検知装置および位置検知方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2011203134A JP2011203134A (ja) | 2011-10-13 |
| JP5434736B2 true JP5434736B2 (ja) | 2014-03-05 |
Family
ID=44879931
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010071066A Expired - Fee Related JP5434736B2 (ja) | 2010-03-25 | 2010-03-25 | 位置検知プログラム、位置検知装置および位置検知方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5434736B2 (ja) |
Families Citing this family (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5541082B2 (ja) * | 2010-10-25 | 2014-07-09 | 富士通株式会社 | 圃場管理支援装置、圃場管理支援プログラムおよび圃場管理支援方法 |
| JP5838772B2 (ja) * | 2011-12-09 | 2016-01-06 | 富士通株式会社 | 作業記録システム及び作業記録方法 |
| JP6332896B2 (ja) * | 2012-05-09 | 2018-05-30 | 株式会社クボタ | 作業情報抽出システム及び作業情報抽出システムの動作方法 |
| JP5778108B2 (ja) * | 2012-09-28 | 2015-09-16 | 株式会社クボタ | 農作業情報管理装置及び農作業情報管理システム |
| JP5806997B2 (ja) * | 2012-09-28 | 2015-11-10 | 株式会社クボタ | 農作業情報管理装置及び農作業情報管理システム |
| JP6084098B2 (ja) * | 2013-03-29 | 2017-02-22 | 株式会社クボタ | 作業表示装置 |
| JP6238615B2 (ja) * | 2013-07-22 | 2017-11-29 | 株式会社クボタ | 車輪駆動式作業車 |
| JP2015084749A (ja) * | 2013-11-01 | 2015-05-07 | ヤンマー株式会社 | 圃場認識システム |
| JP6832881B2 (ja) * | 2018-03-09 | 2021-02-24 | ヤンマーパワーテクノロジー株式会社 | 圃場管理システム |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH09238521A (ja) * | 1996-03-05 | 1997-09-16 | Kubota Corp | 作業機 |
| JP4753169B2 (ja) * | 2004-02-19 | 2011-08-24 | 独立行政法人農業・食品産業技術総合研究機構 | 特定区画の推定方法及び特定区画の確定方法 |
| JP4667060B2 (ja) * | 2005-02-10 | 2011-04-06 | ヤンマー株式会社 | Gps付作業機での圃場位置認識システム |
-
2010
- 2010-03-25 JP JP2010071066A patent/JP5434736B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2011203134A (ja) | 2011-10-13 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5434736B2 (ja) | 位置検知プログラム、位置検知装置および位置検知方法 | |
| CN104854524B (zh) | 挖土机的异常判定方法、管理装置及挖土机 | |
| KR101714145B1 (ko) | 주변차량 식별 장치 및 그 방법 | |
| CN112887172B (zh) | 车辆感知系统测试方法、装置、设备及存储介质 | |
| US20180267166A1 (en) | Obstacle detecting method and apparatus, device and storage medium | |
| JP4418828B2 (ja) | マップマッチング装置、マップマッチング方法及びそのプログラム | |
| US9471911B2 (en) | Information processing apparatus and information processing method | |
| CN105910612A (zh) | 一种个性化导航的方法及系统 | |
| CN113405519B (zh) | 农机的作业亩数计算方法和农机的作业亩数计算系统 | |
| JP7815246B2 (ja) | 運搬道路の漸増的マッピングのための方法及び装置 | |
| CN109916488B (zh) | 动态车辆称重方法及装置 | |
| CN104992146A (zh) | 一种用于人脸识别的方法和装置 | |
| CN113361379A (zh) | 生成目标检测系统和检测目标的方法及装置 | |
| CN118871870A (zh) | 用于农业车辆的操作路径规划 | |
| CN114463502B (zh) | 非接触式安全距离主动预警方法、装置及存储介质 | |
| KR20230104860A (ko) | 작업 정보 관리 장치, 작업 정보 관리 시스템, 기억 매체, 및 작업 정보 관리 방법 | |
| CN109753982A (zh) | 障碍点检测方法、装置和计算机可读存储介质 | |
| CN114386522B (zh) | 基于深度学习的动态目标快速感知方法及系统 | |
| CN101937477B (zh) | 实现图档拟合的数据处理设备、系统及方法 | |
| CN116594408A (zh) | 一种移动协作机器人路径规划系统及方法 | |
| KR101791947B1 (ko) | 프랙탈 차원 분석에 기반한 주행 평가 방법 및 장치 | |
| JP6285467B2 (ja) | 保守運用支援システム、保守運用支援方法、保守運用支援プログラム | |
| JP2011186933A (ja) | 観察支援装置、観察支援システム、観察支援方法、及び観察支援用プログラム | |
| KR20250121938A (ko) | 작업 영역 추정 방법, 작업 영역 추정 시스템, 및 작업 영역 추정 프로그램 | |
| CN115035192B (zh) | 一种烟叶布料车和传送带的位置确定方法及装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20130206 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20131112 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20131113 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20131125 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5434736 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |