JP5434760B2 - エンコーダ - Google Patents
エンコーダ Download PDFInfo
- Publication number
- JP5434760B2 JP5434760B2 JP2010089517A JP2010089517A JP5434760B2 JP 5434760 B2 JP5434760 B2 JP 5434760B2 JP 2010089517 A JP2010089517 A JP 2010089517A JP 2010089517 A JP2010089517 A JP 2010089517A JP 5434760 B2 JP5434760 B2 JP 5434760B2
- Authority
- JP
- Japan
- Prior art keywords
- pattern
- photoelectric conversion
- scale
- position information
- absolute
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images









Landscapes
- Optical Transform (AREA)
Description
つまり、スケールの取り付け方によって、イメージセンサの位置とスケールの位置とが相対的にずれていることにより、イメージセンサにおいてスケールからの光の入射するエリアが回転に応じて変動する。このため、スケールを介して入射する光に基づく光電変換信号を出力する光電変換素子が回転軸の回転に応じて変わってしまい、スケール上のパターンを検出するためのパターン信号として、十分な出力レベルのパターン信号を得ることが難しくなる。よって、得られたパターン信号の信頼性が低下する場合があるという問題がある。
<第1の実施形態>
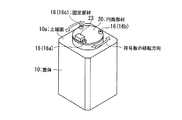
図1は、本発明のエンコーダに係る第1の実施形態のロータリーエンコーダを用いた回転機構の構成を示すブロック図である。図2は、その外観構成を示す斜視図である。なお、ここでは、エンコーダとして、スケールを回転させるロータリーエンコーダ1について以下説明するが、本発明はこれに限られず、スケールを線形上に移動させるリニアエンコーダであってもよい。
また、発光素子22及びイメージセンサ23は、スケール21を挟むように対向して設けられる。
この筐体10本体の上端面10aには、図2に示すように、上端面10aを覆う円筒部材20が固定部材16により筐体10本体に対して取り付けられている。
このインクリメンタルトラック31およびアブソリュートトラック32は、回転モータ11の回転角を示す情報(以下、位置情報という)を取得するためのパターン(位置情報パターン)として、それぞれ、インクリメンタルパターンIPとアブソリュートパターンAPとを備える。また、この位置情報は、回転モータ11によって回転される回転軸12の回転角、および回転軸12の回転に伴って回転するスケール21の回転角を示す情報を含むものである。
基準トラック33は、スケール21の偏芯等に起因して発生する、スケール21とイメージセンサ23との間の相対的な位置ずれを検出するための基準パターンRPを備える。
また、アブソリュートトラック32には、アブソリュートパターンAPが形成されている。このアブソリュートパターンAPは、インクリメンタルパターンIPの最小識別幅ITより広い最小識別幅ATで、例えば、6ビットのM系列パターンのスリット(図においては、それぞれ最小識別幅ATで形成されている透過部の白部分と非透過部の黒部分を含む)が等間隔に形成されている。
なお、インクリメンタルパターンIPとアブソリュートパターンAPとは、基準パターンRPを基準に設けられており、アブソリュートパターンAPは、基準パターンRPよりも中心軸C2に近い側に、一定間隔M1をあけて設けられている。また、インクリメンタルパターンIPは、基準パターンRPよりも中心軸C2から遠い側に、一定間隔M2をあけて設けられている。
また、基準パターンRPのトラック幅RWは、インクリメンタルパターンIPのトラック幅IWやアブソリュートパターンAPのトラック幅AWと異なる。本実施形態においては、基準パターンRPのトラック幅RWの方が、インクリメンタルパターンIPのトラック幅IWやアブソリュートパターンAPのトラック幅AWよりも狭く、トラック幅IWとトラック幅AWとが同一である。
このように、基準パターンRPのトラック幅RWを、より狭くすることで、基準パターンRPに対応するイメージセンサ23上の位置を、より高い精度で検出することができる。また、基準パターンRPを用いてスケール21とイメージセンサ23との間の相対的な位置ずれを検出するイニシャライズ処理は、インクリメンタルパターンIPおよびアブソリュートパターンAPを用いて位置情報を検出する位置検出処理に比べて回転速度を遅くすることができるので、基準パターンRPのトラック幅はインクリメンタルパターンIPおよびアブソリュートパターンAPのトラック幅より狭くすることができる。
なお、本実施形態に係るロータリーエンコーダ1の制御部24は、例えば電源が投入された際、イニシャライズ処理を実行してイメージセンサ23における基準パターンRPに対応する位置を得る。そして、イニシャライズ処理が終了した後、制御部24は、位置情報検出処理に移行して、イニシャライズ処理において得られた基準パターンRPに対応する位置に基づき、アブソリュートパターンAPとインクリメンタルパターンIPとに対応するイメージセンサ23上における位置を選択するものである。
なお、モータ制御部14は、移動指示入力部13から出力される移動指示信号に加えて、制御部24から出力される位置情報に基づき、モータ駆動部15に与えるモータ駆動信号を生成し、スケール21の回転を制御することもできる。
このイメージセンサ23には、画素を形成する複数の光電変換素子が、行方向および列方向の二次元に配列されている。イメージセンサ23としては、汎用のCCD(Charge Coupled Device)イメージセンサや、CMOS(Complementary MOS)イメージセンサを用いることができる。
よって、イメージセンサ23は、位置情報検出処理において、少なくともインクリメンタルパターン光電変換素子I_pixおよびアブソリュートパターン光電変換素子A_pixにおいて得られる光電変換信号を制御部24に出力するように、センサ駆動部25によって制御される。このように、本実施形態におけるロータリーエンコーダ1は、回転モータ11の位置情報(回転位置)を検出するとき(位置情報検出処理)では、位置情報の検出に必要な画素の部分(少なくともインクリメンタルパターン光電変換素子I_pixおよびアブソリュートパターン光電変換素子A_pix)の読み出しを行うことで、発熱を抑えて、精度の向上を図ることができる。
なお、例えば、このパターン信号は、図4に示した通り各パターンに含まれる論理状態を示す信号(例えば、「1010110・・・」等)である。制御部24は、このパターン信号に基づき、スケール(インクリメンタルパターンIPおよびアブソリュートパターンAP)の現在の位置を示す位置情報を得ることができる。
そして、制御部24は、回転軸12の回転角に応じた基準光電変換素子R_pixを示す基準読取位置をメモリ37に記憶させる。
そして、制御部24は、イニシャライズ処理で決定された基準光電変換素子R_pixを示す基準読取位置に対して、この基準光電変換素子R_pixに対応するインクリメンタルパターン光電変換素子I_pixおよびアブソリュートパターン光電変換素子A_pixを示す位置情報読取位置を対応付けた情報をメモリ37に記憶させる。
これにより、例えば、スケール21の中心軸C2が回転軸12の回転中心軸C1に対しての偏芯している場合であっても、イメージセンサ23におけるインクリメンタルパターンIPやアブソリュートパターンAPに対応する位置情報読取位置を、イニシャライズ時に選択することができるため、制御部24は、十分な出力レベルを有するパターン信号を得ることができる。
図5及び図6は、イメージセンサ23上におけるアブソリュートパターンAPおよびインクリメンタルパターンIPに対応する位置情報読取位置の変動について説明する図である。なお、イメージセンサ23上においてアブソリュートパターンAPを介した光が入射する領域をアブソリュートパターン照射領域ARといい、イメージセンサ23上においてインクリメンタルパターンIPを介した光が入射する領域をインクリメンタルパターン照射領域IRという。
つまり、図5(b)に示す通り、B地点のアブソリュートパターン照射領域AR_bおよびインクリメンタルパターンIR_bは、それぞれ、A地点のそれぞれの位置(図において点線で示す位置)から紙面左側に動いている。また、図5(c)に示す通り、アブソリュートパターン照射領域AR_cおよびインクリメンタルパターンIR_cは、それぞれ、A地点のそれぞれの位置(図において点線で示す位置)から紙面右側に動いている。
そこで、本第1の実施形態に係るロータリーエンコーダでは、インクリメンタルパターン信号ISやアブソリュートパターン信号ASを検出する場合に、基準パターンRPに対応する基準読取位置を基準とした位置情報読取位置に従って、インクリメンタルパターン信号ISやアブソリュートパターン信号ASを検出する。
同様にして、図6(b)に示す通り、B地点における基準読取位置として、基準光電変換素子R_pix_bが決定された場合、この基準光電変換素子R_pix_bから間隔M1だけスケール21の中心軸C2に近い方にアブソリュートパターン照射領域AR_bを決定し、この基準光電変換素子R_pix_bから間隔M2だけスケール21の中心軸C2より遠い方にインクリメンタルパターン照射領域IR_bを決定する。
また、図6(c)に示す通り、C地点における基準読取位置として、基準光電変換素子R_pix_cが決定された場合、この基準光電変換素子R_pix_cから間隔M1だけスケール21の中心軸C2に近い方にアブソリュートパターン照射領域AR_cを決定し、この基準光電変換素子R_pix_cから間隔M2だけスケール21の中心軸C2より遠い方にインクリメンタルパターン照射領域IR_cを決定する。
図7は、本発明の第1の実施形態における制御部24の動作に基づく機能ブロック図である。イニシャライズ処理では、回転モータ11の回転軸12が1回転され、回転するスケール21を介した光が、イメージセンサ23に入射する。そして、イメージセンサ23は、入射した光に基づき光電変換信号を、増幅部35、A/Dコンバータ36を介して、基準パターン検出位置取得部51に出力する。
基準パターン検出位置取得部51は、イメージセンサ23から入力される光電変換信号に基づき、例えば、出力レベルが閾値以上となる光電変換信号を出力する画素(光電変換素子)を、基準パターンRPに対応する基準読取位置として決定する。そして、基準パターン検出位置取得部51は、当該光電変換信号が出力されたスケール21の位置(例えば回転角度)に応じた基準読取位置をメモリ37に記憶する。なお、この基準読取位置に対応付けられるスケール21の回転角度は、後述の通り、アブソリュート位置検出部52によってスケール21の絶対位置が検出されることにより得る。
なお、位置情報検出処理では、制御部25によってイメージセンサ23の位置情報読取位置が制御されて、位置情報読取位置に対応するアブソリュート光電変換素子A_pixから出力される光電変換信号がアブソリュート位置検出部52に入力される。よって、アブソリュート位置検出部52は、この光電変換信号に基づき、スケール21の絶対位置を検出する。
また、インクリメンタル位置検出部53は、カウンタ54によって計数されるカウント値に基づき、回転軸12の所定の回転角度からの相対角度(例えば現在位置からの移動量)を検出し、この相対角度を示す相対位置情報を位置算出部59に出力する。
カウンタ54は、インクリメンタル位置検出部53において得られるA相信号とB相信号に基づき、インクリメンタルパターンIPの論理状態が変化した回数をカウントし、このカウント値をインクリメンタル検出部53を介して、位置算出部59に出力する。
また、インクリメンタルパターン読取位置決定部56は、メモリ37に記憶されている基準読取位置(基準光電変換素子R_pix)を基準として、イメージセンサ23上のインクリメンタルパターンIPに対応する読み出し位置(インクリメンタルパターン光電変換素子I_pix)を決定し、センサ駆動部25に対して、インクリメンタルパターン光電変換素子I_pixを駆動するよう制御する。
図10は、本発明の第2の実施形態のエンコーダにおけるスケール121を示すものである。図10に示すように、本発明の第2の実施形態のエンコーダにおけるスケール121には、インクリメンタルトラック131と、アブソリュートトラック132と、基準トラック133とが設けられている。インクリメンタルトラック131及びアブソリュートトラック132については、前述の第1の実施形態と同様である。
本実施形態に係るロータリーエンコーダ1の取り付け方法の一例について説明する。
図1、2を参照して説明すると、筐体10本体には、回転モータ11が収容されている。この筐体10の上端面10aには、上述の通り、回転モータ11の回転軸12が突出している。
なお、このロータリーエンコーダ1を組み立てる前において、この筐体10本体と、円筒部材20とは別々の部材であって、スケール21も回転軸12に取り付けられていない状態である。また、円筒部材20の内側には、イメージセンサ23が取り付けられており、このイメージセンサ23と、センサ駆動部25と増幅器35とを接続するための接続部を備える。
なお、回転軸12に接合部21aを合わせてスケール21がセットされることにより、発光素子22の光を射出する部分とスケール21のインクリメンタルパターンIP、アブソリュートパターンAPおよび基準パターンRPとが向かい合う。
なお、スケール21および発光素子22に対するイメージセンサ23の位置決めは、図2に示すように、円筒部材16において予め決められている固定部材16を固定する場所(3箇所)と、筐体10の上端面10aにおいて予め決められている固定部材16を固定する場所とを合わせて行われる。例えば、固定部材16がネジの場合、円筒部材16において固定部材16a、16b、16cを固定するネジ穴が予め決められている。また、筐体10においても、この固定部材16a、16b、16cを固定するネジ穴が予め決められている。そして、この固定部材16a、16b、16cを固定するネジ穴同士をそれぞれ合わせて、筐体10と円筒部材20とを固定させた場合、図1に示す通り、発光素子22からスケールの各トラック31〜33を透過した光がイメージセンサ23の光電変換面に入射する位置に、イメージセンサ23が円筒部材20の内側に取り付けられている。
11 回転モータ
12 回転軸
21 スケール
22 発光素子
23 イメージセンサ
24 制御部
25 センサ駆動部
37 メモリ
Claims (8)
- 第1移動軸を有する支持部に接続され、第2移動軸を基準に設けられる基準パターンと、当該基準パターンを基準に設けられる位置情報パターンとを有するスケールと、
前記基準パターンを介した第1の光を受光して当該第1の光に基づく第1の光電変換信号を出力する複数の第1の光電変換素子と、前記位置情報パターンを介した第2の光を受光して当該第2の光に基づく第2の光電変換信号を出力する複数の第2の光電変換素子とを有する光電変換部と、
前記第2の光電変換信号に基づき前記スケールの位置情報を検出し、前記第1の光電変換信号に基づき前記スケールの位置情報に対応する前記第2の光電変換素子を選択する制御部と、
を備えることを特徴とするエンコーダ。 - 前記制御部は、
所定の閾値以上の前記第1の光電変換信号を出力する前記第1の光電変換素子を基準として、前記スケールの位置情報に応じた前記第2の光電変換素子を選択することを特徴とする請求項1に記載のエンコーダ。 - 前記制御部は、
前記支持部を動作させることで前記スケールを移動させて、前記スケールの位置情報に対応する前記第2の光電変換素子を選択し、選択された前記第2の光電変換素子を前記スケールの位置情報に対応付けた情報を記憶部に記憶させることを特徴とする請求項1または2に記載のエンコーダ。 - 前記制御部は、
前記記憶部に記憶されている前記情報を参照して、前記スケールの位置情報に対応する前記第2の光電変換信号に基づき前記スケールの移動量を検出することを特徴とする請求項3に記載のエンコーダ。 - 前記スケールの前記基準パターンは、前記位置情報パターンのトラック幅とは異なるトラック幅を有することを特徴とする請求項1から4のいずれか一項に記載のエンコーダ。
- 前記スケールの前記基準パターンは、
第1のトラック幅で形成される前記位置情報パターンに比べて狭い第2のトラック幅で形成されることを特徴とする請求項1から5のいずれか一項に記載のエンコーダ。 - 前記基準パターンの少なくとも一部は、バーコード情報を含むことを特徴とする請求項1から6のいずれか一項に記載のエンコーダ。
- 前記基準パターンは、前記スケールと前記光電変換部との相対的な位置ずれを検出するためのパターンであることを特徴とする請求項1から7のいずれか一項に記載のエンコーダ。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010089517A JP5434760B2 (ja) | 2010-04-08 | 2010-04-08 | エンコーダ |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010089517A JP5434760B2 (ja) | 2010-04-08 | 2010-04-08 | エンコーダ |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2011220805A JP2011220805A (ja) | 2011-11-04 |
| JP5434760B2 true JP5434760B2 (ja) | 2014-03-05 |
Family
ID=45037984
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010089517A Active JP5434760B2 (ja) | 2010-04-08 | 2010-04-08 | エンコーダ |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5434760B2 (ja) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6786873B2 (ja) * | 2016-05-20 | 2020-11-18 | 株式会社ニコン | エンコーダ装置、駆動装置、ステージ装置、及びロボット装置 |
| JP2018021884A (ja) * | 2016-08-05 | 2018-02-08 | 株式会社リコー | 位相検出装置、モータシステム、画像形成装置、搬送装置、及びセンサレベル取得方法。 |
| CN118369553A (zh) * | 2021-12-27 | 2024-07-19 | 松下知识产权经营株式会社 | 编码器以及安装方法 |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3683375B2 (ja) * | 1997-04-10 | 2005-08-17 | 株式会社リコー | ロータリエンコーダ |
| JP4433240B2 (ja) * | 2000-03-16 | 2010-03-17 | 株式会社安川電機 | ロータリエンコーダおよびその偏心補正方法 |
| JP2005121612A (ja) * | 2003-10-20 | 2005-05-12 | Hamamatsu Photonics Kk | アブソリュートエンコーダ及び角度検出方法 |
-
2010
- 2010-04-08 JP JP2010089517A patent/JP5434760B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2011220805A (ja) | 2011-11-04 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5479236B2 (ja) | ロータリーエンコーダ | |
| JP5574899B2 (ja) | ロータリーエンコーダ及びこれを備えた光学機器 | |
| US10514255B2 (en) | Eccentricity calculating method, rotary encoder, robotic arm and robot apparatus | |
| US20080042051A1 (en) | Rotary optical encoder employing multiple subencoders with common reticle substrate | |
| US20140277730A1 (en) | Position detection apparatus, lens apparatus, image pickup system, and machine tool apparatus | |
| EP2343510A2 (en) | Rotary encoder | |
| US20090321520A1 (en) | Encoder home position sensing method and system | |
| US10094684B2 (en) | Method of manufacturing rotary scale, rotary scale, rotary encoder, driving apparatus, image pickup apparatus and robot apparatus | |
| JP2012068124A5 (ja) | ロータリーエンコーダ及びこれを備えた光学機器 | |
| JP2011501140A (ja) | 光学式位置測定装置用の検出エレメント・アレイ | |
| JP5335970B2 (ja) | エンコーダ | |
| JP5434760B2 (ja) | エンコーダ | |
| US20100006748A1 (en) | Encoder and photodetector for encoder | |
| JP5458847B2 (ja) | 回転体の傾き・偏心検出装置、及び回転体の傾き・偏心検出方法 | |
| WO2006006532A1 (ja) | エンコーダ | |
| JP7194425B2 (ja) | 光学式エンコーダおよびその動作方法 | |
| WO2018163424A1 (ja) | アブソリュートエンコーダ | |
| US6759647B2 (en) | Projection encoder | |
| JP4737598B2 (ja) | エンコーダ | |
| JP2005037333A (ja) | アブソリュートエンコーダ及び角度検出方法 | |
| JP4890190B2 (ja) | エンコーダ | |
| JP2009058243A (ja) | 光学式エンコーダ | |
| JP2013108911A (ja) | 光学式エンコーダおよびこれを備えた装置 | |
| JP2005121612A (ja) | アブソリュートエンコーダ及び角度検出方法 | |
| JP4779517B2 (ja) | 光学式絶対値エンコーダ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20130308 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20131018 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20131112 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20131125 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5434760 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |