JP5449653B2 - 関節運動する内視鏡付属チャネル - Google Patents
関節運動する内視鏡付属チャネル Download PDFInfo
- Publication number
- JP5449653B2 JP5449653B2 JP2007075136A JP2007075136A JP5449653B2 JP 5449653 B2 JP5449653 B2 JP 5449653B2 JP 2007075136 A JP2007075136 A JP 2007075136A JP 2007075136 A JP2007075136 A JP 2007075136A JP 5449653 B2 JP5449653 B2 JP 5449653B2
- Authority
- JP
- Japan
- Prior art keywords
- handle
- flexible neck
- cable
- movement
- cables
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 230000007246 mechanism Effects 0.000 claims description 19
- 238000005452 bending Methods 0.000 claims description 13
- 230000000295 complement effect Effects 0.000 claims description 4
- 210000003739 neck Anatomy 0.000 description 160
- 239000012636 effector Substances 0.000 description 76
- 238000000034 method Methods 0.000 description 49
- 210000001519 tissue Anatomy 0.000 description 16
- 230000001276 controlling effect Effects 0.000 description 8
- 238000005520 cutting process Methods 0.000 description 8
- 230000003287 optical effect Effects 0.000 description 8
- 229920001746 electroactive polymer Polymers 0.000 description 7
- 230000013011 mating Effects 0.000 description 7
- 230000003278 mimic effect Effects 0.000 description 6
- 230000000875 corresponding effect Effects 0.000 description 5
- 230000008878 coupling Effects 0.000 description 5
- 238000010168 coupling process Methods 0.000 description 5
- 238000005859 coupling reaction Methods 0.000 description 5
- 150000002500 ions Chemical class 0.000 description 5
- 230000006870 function Effects 0.000 description 4
- 230000009471 action Effects 0.000 description 3
- 230000008901 benefit Effects 0.000 description 3
- 238000004140 cleaning Methods 0.000 description 3
- 239000002322 conducting polymer Substances 0.000 description 3
- 229920001940 conductive polymer Polymers 0.000 description 3
- 239000012530 fluid Substances 0.000 description 3
- 239000000463 material Substances 0.000 description 3
- 229920000642 polymer Polymers 0.000 description 3
- 230000004044 response Effects 0.000 description 3
- 239000000853 adhesive Substances 0.000 description 2
- 230000001070 adhesive effect Effects 0.000 description 2
- 230000003416 augmentation Effects 0.000 description 2
- 230000008859 change Effects 0.000 description 2
- 230000003247 decreasing effect Effects 0.000 description 2
- 238000006073 displacement reaction Methods 0.000 description 2
- 230000003213 activating effect Effects 0.000 description 1
- 230000000712 assembly Effects 0.000 description 1
- 238000000429 assembly Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 238000002674 endoscopic surgery Methods 0.000 description 1
- 238000010304 firing Methods 0.000 description 1
- 239000011521 glass Substances 0.000 description 1
- 230000010354 integration Effects 0.000 description 1
- -1 interference fits Substances 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 210000003205 muscle Anatomy 0.000 description 1
- HLXZNVUGXRDIFK-UHFFFAOYSA-N nickel titanium Chemical compound [Ti].[Ti].[Ti].[Ti].[Ti].[Ti].[Ti].[Ti].[Ti].[Ti].[Ti].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni] HLXZNVUGXRDIFK-UHFFFAOYSA-N 0.000 description 1
- 229910001000 nickel titanium Inorganic materials 0.000 description 1
- 239000002861 polymer material Substances 0.000 description 1
- 230000002980 postoperative effect Effects 0.000 description 1
- 238000011084 recovery Methods 0.000 description 1
- 239000012781 shape memory material Substances 0.000 description 1
- 239000007787 solid Substances 0.000 description 1
- 230000000087 stabilizing effect Effects 0.000 description 1
- 239000013589 supplement Substances 0.000 description 1
- 238000001356 surgical procedure Methods 0.000 description 1
- 230000001225 therapeutic effect Effects 0.000 description 1
Images



















Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/068—Surgical staplers, e.g. containing multiple staples or clamps
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Surgery (AREA)
- Heart & Thoracic Surgery (AREA)
- Engineering & Computer Science (AREA)
- Biomedical Technology (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Medical Informatics (AREA)
- Molecular Biology (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Surgical Instruments (AREA)
- Endoscopes (AREA)
Description
本発明は、広義に外科装置の作用端部の動きを制御するための方法、および装置に関する。
内視鏡外科器具は、天然の開口部を使用するため術後の回復時間が短く、および合併症を減らすことができるので、多くの場合、従来の開腹外科装置よりも好まれる。したがって、用具の作用端部を天然の開口部を通して所望な外科部位に正確に配置するのに適した、内視鏡外科器具の分野はかなり発展してきた。これらの用具を使用して、診断効果および治療効果を達成するために、様々な方法で組織を係合する、および/または治療することができる。
ある実施形態では、外科装置は、近位端および遠位端を備えた細長いシャフトを有するように提供されており、近位端は、その近位端に移動可能に結合されたハンドルを有し、遠位端は、その遠位端から延びる可撓性首部を有する。ハンドルおよび可撓性首部は、ハンドルの動きによって可撓性首部が複数面内で関節運動するのに効果的であるように、動作可能に関連付けられることもできる。ある例示的な実施形態では、ハンドルの動きは、可撓性首部によって模倣されることもできる。また、装置は、ハンドルと可撓性首部の間に延在し、かつ、ハンドルから可撓性首部へ動きを伝えるように構成された、アクチュエータを含むこともできる。
ここで、ある例示的な実施形態を説明し、本明細書に開示される装置の構造、機能、製造、および使用、ならびに方法の原理の全般的な理解を提供する。これら実施形態の1つ以上の実施例は、添付の図面に図示されている。当業者は、本明細書で特に説明され添付の図面に図示される、装置および方法は、非限定的な例示的実施形態であり、本発明の範囲は請求項によってのみ規定される、ということを理解するであろう。ある例示的な実施形態に関連して図示、または説明された特徴は、別の実施形態の特徴と組み合わされてもよい。そのような変更および変形は、本発明の範囲内に含まれるものと意図される。
(1) 内視鏡に解放可能に取り付けるための付属チャネルにおいて、
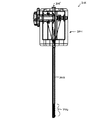
内腔を有する細長い管であって、前記内腔は、前記細長い管を通って前記細長い管の近位端部と遠位端部との間に延在しており、用具を受け入れる、細長い管と、
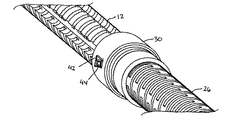
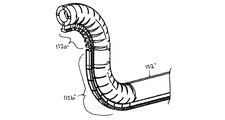
前記細長い管の前記遠位端から延びており、かつ、前記細長い管を通って延びる用具を方向付けるために屈曲するよう構成されている、可撓性首部と、
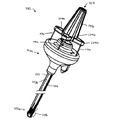
前記細長い管の前記近位端部に結合されたハンドルであって、前記ハンドルの動きが前記可撓性首部によって模倣されるように、前記可撓性首部に動作可能に関連付けられている、ハンドルと、
を含む、付属チャネル。
(2) 実施態様1に記載の装置において、
前記可撓性首部は、前記可撓性首部を屈曲しやすくするために前記可撓性首部に形成された複数のスリットを含む、装置。
(3) 実施態様2に記載の装置において、
前記可撓性首部は、遠位スリット領域、および近位スリット領域を含み、
前記スリットは、前記可撓性首部にかけられた張力により、前記可撓性首部を前記近位領域、および前記遠位領域で曲げるように構成されている、装置。
(4) 実施態様1に記載の装置において、
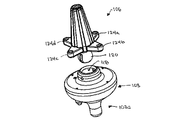
前記ハンドルは、静止部材、および、その静止部材に対して関節運動するように構成された可動部材を含む、装置。
(5) 実施態様4に記載の装置において、
前記可動部材は、ボールソケットジョイント、ヒンジジョイント、および、屈曲ジョイントからなる群から選ばれる継ぎ手によって前記静止部材に結合されている、装置。
(6) 実施態様1に記載の装置において、
前記ハンドルと前記可撓性首部との間に延在するアクチュエータ、
をさらに含み、
前記アクチュエータは、前記ハンドルから前記可撓性首部へ動きを伝えるように構成されている、装置。
(7) 実施態様6に記載の装置において、
前記アクチュエータは、前記細長い管の長さに沿って延びる少なくとも一つのケーブルを含む、装置。
(8) 実施態様7に記載の装置において、
前記ハンドル、および前記少なくとも一つのケーブル、を固定位置にロックするために、前記ハンドル、および前記少なくとも一つのケーブルのうちの少なくとも一つに係合するように位置付けられた、ロック機構、
をさらに含む、装置。
(9) 実施態様7に記載の装置において、
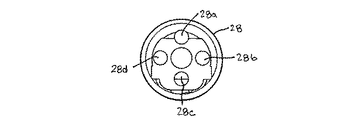
前記少なくとも一つのケーブルは、前記細長い管の周囲に互いに等間隔に離間された複数のケーブルを含む、装置。
(10) 実施態様7に記載の装置において、
前記細長い管は、前記細長い管の側壁内に形成され、かつ、前記細長い管の前記長さに沿って延びる、少なくとも一つの管腔を含み、
前記少なくとも一つのアクチュエータは、前記少なくとも一つの管腔内部にスライド可能に配置されている、装置。
(11) 実施態様1に記載の装置において、
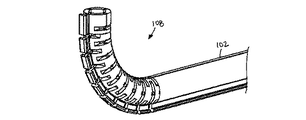
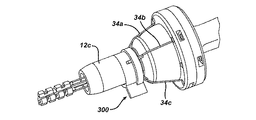
前記細長い管は、前記細長い管の外表面上に形成され、かつ、前記外表面の長さに沿って延びる噛合要素を含み、
前記噛合要素は、内視鏡あるいは内視鏡スリーブ上に形成された相補的な噛合要素にかみ合う、装置。
内視鏡周りに配置されるように構成された細長いスリーブと、
前記細長いスリーブに取り外し可能にかみ合うことができる付属チャネルであって、
用具を受け入れるための、前記付属チャネルを通り前記付属チャネルの近位端部と遠位端部との間に延在する内腔、
前記付属チャネルの遠位部分上に形成された可撓性部分であって、その可撓性部分に形成された複数のスリットによって可撓性にされた、可撓性部分、ならびに、
前記付属チャネルの前記近位端部に結合された少なくとも一つのハンドルであって、前記少なくとも一つのハンドルが前記可撓性部分を少なくとも一つの面内で関節運動させるように構成されるように、前記可撓性部分に動作可能に関連付けられている、少なくとも一つのハンドル、
を有する、付属チャネルと、
を含む、内視鏡システム。
(13) 実施態様12に記載のシステムにおいて、
前記少なくとも一つのハンドルは、少なくとも一つのケーブルによって前記可撓性部分に動作可能に関連付けられ、
前記少なくとも一つのハンドルは、前記少なくとも一つのケーブルを前記付属チャネルに対して軸方向に動かし、これにより、前記可撓性部分が少なくとも一つの面内で関節運動するように、前記少なくとも一つのケーブルが、前記付属チャネルの前記可撓性部分に張力をかけるように、構成されている、システム。
(14) 実施態様12に記載のシステムにおいて、
前記少なくとも一つのハンドルは、前記可撓性部分を複数の面内で関節運動させるように構成された単一ハンドルを含む、システム。
(15) 実施態様14に記載のシステムにおいて、
前記単一ハンドルは、
前記付属チャネルの前記近位端部に結合された静止部材、および、
前記静止部材に対して関節運動するように構成された可動部材、
を含む、システム。
(16) 実施態様14に記載のシステムにおいて、
前記単一ハンドル、および前記可撓性部分は、前記単一ハンドルの動きが前記可撓性部分によって模倣されるように、動作可能に関連付けられている、システム。
(17) 実施態様12に記載のシステムにおいて、
前記少なくとも一つのハンドルは、
前記可撓性部分を第一面内で関節運動させるように構成されている第一部材、および、
前記可撓性部分を第二面内で関節運動させるように構成されている第二部材、
を含む、システム。
(18) 実施態様17に記載のシステムにおいて、
前記少なくとも一つのハンドルは、前記付属チャネルの前記近位端部に結合された静止部材を含み、
前記第一および第二部材は、前記静止部材に回転可能に結合されている、システム。
(19) 実施態様18に記載のシステムにおいて、
前記第一部材に結合された第一スプールであって、前記第一スプールから延び、かつ、前記可撓性部分に結合されている、少なくとも一つのケーブルを有する、第一スプールと、
前記第二部材に結合されている第二スプールであって、前記第二スプールから延び、かつ、前記可撓性部分に結合されている、少なくとも一つのケーブルを有する、第二スプールと、
をさらに含み、
前記第一および第二部材は、前記第一および第二スプールを回転させ、それによって、前記ケーブルを軸方向に動かし、前記可撓性部分を関節運動させるのに効果的である、システム。
付属チャネルを体腔内部に配置された内視鏡にスライド可能にかみ合わせて、前記付属チャネルの遠位端部を、前記内視鏡の遠位端部に近接して位置付けるステップと、
前記用具が前記付属チャネルの前記遠位端部を越えて遠位側に延びるように、前記用具を前記付属チャネル内の管腔を通して挿入するステップと、
前記付属チャネルの近位端部に結合されたハンドルを動かし、前記付属チャネルの前記遠位端部上の可撓性首部を関節運動させ、それによって、前記用具の作用端部を所望の位置に方向付ける、ステップと、
を含む、方法。
(21) 実施態様20に記載の方法において、
前記可撓性首部を、固定した関節運動位置にロックするステップ、
をさらに含む、方法。
(22) 実施態様20に記載の方法において、
前記ハンドルを動かす前記ステップは、前記ハンドルを前記付属チャネルに対して旋回可能に関節運動させるステップを含む、方法。
(23) 実施態様22に記載の方法において、
前記可撓性首部は、前記ハンドルの動きを模倣する、方法。
(24) 実施態様20に記載の方法において、
前記ハンドルを動かす前記ステップは、前記ハンドル上の少なくとも一つの回転可能部材を回転させるステップを含む、方法。
(25) 実施態様20に記載の方法において、
前記可撓性首部が関節運動する場合、前記可撓性首部は、前記可撓性首部の長さに沿う複数の位置で曲がる、方法。
(26) 実施態様20に記載の方法において、
前記付属チャネルを内視鏡にスライド可能にかみ合わせる前記ステップは、前記付属チャネルの長さに沿って形成された噛合要素を、前記内視鏡の周りに配置されたスリーブの長さに沿って形成された噛合要素に結合するステップを含む、方法。
Claims (12)
- 内視鏡に解放可能に取り付けるための付属チャネルにおいて、
内腔を有する細長い管であって、前記内腔は、前記細長い管を通って前記細長い管の近位端部と遠位端部との間に延在しており、用具を受け入れる、細長い管と、
前記細長い管の前記遠位端から延びており、かつ、前記細長い管を通って延びる用具を方向付けるために屈曲するよう構成されている、可撓性首部と、
前記細長い管の前記近位端部に結合される、ハンドルと、
一端がハンドルに直結され且つ他端が前記可撓性首部と係合する、少なくとも1つのケーブルであって、前記少なくとも1つのケーブルを介して前記ハンドルが前記可撓性首部に動作可能に関連付けられて、前記ハンドルの動きが前記可撓性首部によって模倣される、少なくとも1つのケーブルと、
前記細長い管の外表面上に形成され且つ前記外表面の長さに沿って延びるレールであって、内視鏡あるいは内視鏡スリーブ上に形成された相補的なトラックに受容されるように構成されたレールと、
を含む、付属チャネル。 - 請求項1に記載の装置において、
前記可撓性首部は、前記可撓性首部を屈曲しやすくするために前記可撓性首部に形成された複数のスリットを含む、装置。 - 請求項2に記載の装置において、
前記可撓性首部は、遠位スリット領域、および近位スリット領域を含み、
前記スリットは、前記可撓性首部にかけられた張力により、前記可撓性首部を前記近位領域、および前記遠位領域で曲げるように構成されている、装置。 - 請求項1に記載の装置において、
前記ハンドルは、静止部材、および、その静止部材に対して関節運動するように構成された可動部材を含む、装置。 - 請求項4に記載の装置において、
前記可動部材は、ボールソケットジョイント、ヒンジジョイント、および、屈曲ジョイントからなる群から選ばれる継ぎ手によって前記静止部材に結合されている、装置。 - 請求項1に記載の装置において、
前記ハンドル、および前記少なくとも1つのケーブル、を固定位置にロックするために、前記ハンドル、および前記少なくとも1つのケーブルのうちの少なくとも1つに係合するように位置付けられた、ロック機構、
をさらに含む、装置。 - 請求項1に記載の装置において、
前記少なくとも1つのケーブルは、前記細長い管の周囲に互いに等間隔に離間された複数のケーブルを含む、装置。 - 請求項1に記載の装置において、
前記細長い管は、前記細長い管の側壁内に形成され、かつ、前記細長い管の前記長さに沿って延びる、少なくとも1つの管腔を含み、
前記少なくとも1つのケーブルは、前記少なくとも1つの管腔内部にスライド可能に配置されている、装置。 - 請求項1に記載の装置において、
前記細長い管の前記近位端部に対する前記ハンドルの動きにより、前記ハンドルの角度をつけた方向付けに比例して前記可撓性首部を角度をつけて方向付けすることによって、
前記可撓性首部が前記ハンドルの動きを模倣する、装置。 - 請求項1に記載の装置において、
前記ハンドルは、前記細長い管の周りのいかなる方向にも旋回して、前記ハンドルを前記細長い管の前記近位端部に対して角度をつけて方向付けするように構成されている、装置。 - 請求項1に記載の装置において、
前記ハンドルは、前記ハンドルを貫通する管腔を含み、該管腔は、第二の用具が前記付属チャネルの前記内腔と前記ハンドルの前記管腔とに挿入できるように、前記付属チャネルの前記内腔と軸方向に整列する、装置。 - 内視鏡周りに配置されるように構成された細長いスリーブと、
請求項1に記載の付属チャネルであって、前記細長いスリーブに対して取り外し可能に外面にかみあっている、内視鏡システム。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US11/277,324 US20070225562A1 (en) | 2006-03-23 | 2006-03-23 | Articulating endoscopic accessory channel |
| US11/277,324 | 2006-03-23 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2007252921A JP2007252921A (ja) | 2007-10-04 |
| JP5449653B2 true JP5449653B2 (ja) | 2014-03-19 |
Family
ID=38596492
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2007075136A Expired - Fee Related JP5449653B2 (ja) | 2006-03-23 | 2007-03-22 | 関節運動する内視鏡付属チャネル |
Country Status (5)
| Country | Link |
|---|---|
| JP (1) | JP5449653B2 (ja) |
| CN (1) | CN101040772A (ja) |
| AU (1) | AU2007201204B2 (ja) |
| BR (1) | BRPI0704599A (ja) |
| MX (1) | MX2007003575A (ja) |
Families Citing this family (38)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8256430B2 (en) | 2001-06-15 | 2012-09-04 | Monteris Medical, Inc. | Hyperthermia treatment and probe therefor |
| KR100911248B1 (ko) * | 2007-10-17 | 2009-08-07 | 국립암센터 | 소구경 복강경 수술기구 |
| GB2456165A (en) * | 2008-01-04 | 2009-07-08 | Gyrus Medical Ltd | Slotted, flexible shaft for an endoscopic instrument |
| DE102008015418A1 (de) * | 2008-03-20 | 2009-09-24 | Richard Wolf Gmbh | Medizinisches Instrument |
| US8728092B2 (en) | 2008-08-14 | 2014-05-20 | Monteris Medical Corporation | Stereotactic drive system |
| US8747418B2 (en) | 2008-08-15 | 2014-06-10 | Monteris Medical Corporation | Trajectory guide |
| US8979871B2 (en) | 2009-08-13 | 2015-03-17 | Monteris Medical Corporation | Image-guided therapy of a tissue |
| CN101791247B (zh) * | 2010-04-01 | 2012-04-11 | 天津大学 | 微创外科手术用多自由度手术工具 |
| US9314308B2 (en) | 2013-03-13 | 2016-04-19 | Ethicon Endo-Surgery, Llc | Robotic ultrasonic surgical device with articulating end effector |
| EP2997879B1 (en) * | 2013-03-29 | 2019-03-13 | Olympus Corporation | Master-slave system |
| DE102013214278A1 (de) | 2013-07-22 | 2015-01-22 | Digital Endoscopy Gmbh | Abdichtungsbauteil für einen endoskopstecker |
| DE102013222042A1 (de) | 2013-10-30 | 2015-04-30 | Digital Endoscopy Gmbh | Auslenkbewegungsübertragungseinrichtung, Endoskopdeflectingsteuerung und Endoskop |
| DE102013222041A1 (de) * | 2013-10-30 | 2015-04-30 | Digital Endoscopy Gmbh | Auslenkbewegungsübertragungseinrichtung, Endoskopdeflectingsteuerung und Endoskop |
| DE102013222039A1 (de) | 2013-10-30 | 2015-04-30 | Digital Endoscopy Gmbh | An ein Mutterendoskop anbringbares Sekundärendoskop und Kombination aus Mutterendoskop und Sekundärendoskop |
| DE102013224683A1 (de) | 2013-12-02 | 2015-06-03 | Digital Endoscopy Gmbh | Endoskopkopf und endoskop |
| DE102013226591A1 (de) | 2013-12-19 | 2015-06-25 | Digital Endoscopy Gmbh | Vorrichtung und verfahren zum herstellen eines länglichen hohlprofilelements, längliches hohlprofilelement und eine abwinkelungseinheit für ein endoskop |
| JP6284182B2 (ja) * | 2014-01-08 | 2018-02-28 | 国立大学法人九州大学 | 屈曲処置具用操作部 |
| WO2015106241A1 (en) * | 2014-01-13 | 2015-07-16 | Arthrex, Inc | Steerable surgical device with joystick |
| DE102014201208A1 (de) | 2014-01-23 | 2015-07-23 | Digital Endoscopy Gmbh | Fluidblock für ein endoskopbedienteil und endoskop |
| CN106572783A (zh) * | 2014-01-24 | 2017-04-19 | 皇家飞利浦有限公司 | 用于经食管超声心动图探头的机器人致动器 |
| DE102014201286B4 (de) | 2014-01-24 | 2019-12-24 | Digital Endoscopy Gmbh | Verfahren und vorrichtung zur nachführung der grundfrequenz eines stimmsignals in echtzeit |
| US9433383B2 (en) | 2014-03-18 | 2016-09-06 | Monteris Medical Corporation | Image-guided therapy of a tissue |
| US10675113B2 (en) | 2014-03-18 | 2020-06-09 | Monteris Medical Corporation | Automated therapy of a three-dimensional tissue region |
| WO2015143026A1 (en) | 2014-03-18 | 2015-09-24 | Monteris Medical Corporation | Image-guided therapy of a tissue |
| US9987000B2 (en) | 2014-12-18 | 2018-06-05 | Ethicon Llc | Surgical instrument assembly comprising a flexible articulation system |
| US10327830B2 (en) | 2015-04-01 | 2019-06-25 | Monteris Medical Corporation | Cryotherapy, thermal therapy, temperature modulation therapy, and probe apparatus therefor |
| US10507303B2 (en) * | 2015-05-07 | 2019-12-17 | St. Jude Medical, Cardiology Division, Inc. | Medical device including a variable torque assembly for device deflection |
| DE102015113016B4 (de) | 2015-08-07 | 2018-03-29 | Digital Endoscopy Gmbh | Endoskopkopf |
| US11206968B2 (en) | 2015-11-20 | 2021-12-28 | Boston Scientific Scimed, Inc. | Actuation handle for accessory devices |
| US11660106B2 (en) * | 2016-07-19 | 2023-05-30 | Cilag Gmbh International | Articulation joint having an inner guide |
| KR20240052889A (ko) | 2016-09-09 | 2024-04-23 | 인튜어티브 서지컬 오퍼레이션즈 인코포레이티드 | 스테이플러 빔 구조 |
| CN109925060A (zh) * | 2017-12-15 | 2019-06-25 | 中国人民解放军第二军医大学 | 一种仿生手术器械及其控制方法 |
| US11672596B2 (en) | 2018-02-26 | 2023-06-13 | Neuwave Medical, Inc. | Energy delivery devices with flexible and adjustable tips |
| US11051809B2 (en) * | 2018-12-31 | 2021-07-06 | Cilag Gmbh International | Cartridge receiving jaw for surgical stapler and associated method of manufacture with MIM |
| DE102019121039A1 (de) * | 2019-08-05 | 2021-02-11 | Karl Storz Se & Co. Kg | Endoskopische Vorrichtung |
| CN116157080A (zh) * | 2020-09-22 | 2023-05-23 | 波士顿科学有限公司 | 医用铰接装置及其使用方法 |
| AU2021361124A1 (en) * | 2020-10-16 | 2023-06-08 | Resnent, Llc | Endoscope attachment mechanisms and methods of use |
| WO2022126461A1 (en) * | 2020-12-17 | 2022-06-23 | Covidien Lp | Articulation and articulation lock features for articulating surgical instruments such as endoscopes |
Family Cites Families (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO1993013704A1 (en) * | 1992-01-09 | 1993-07-22 | Endomedix Corporation | Bi-directional miniscope |
| US7637905B2 (en) * | 2003-01-15 | 2009-12-29 | Usgi Medical, Inc. | Endoluminal tool deployment system |
| JP2002051974A (ja) * | 2000-08-14 | 2002-02-19 | Fuji Photo Optical Co Ltd | 内視鏡処置具 |
| US7615005B2 (en) * | 2003-05-16 | 2009-11-10 | Ethicon Endo-Surgery, Inc. | Medical apparatus for use with an endoscope |
| US7090637B2 (en) * | 2003-05-23 | 2006-08-15 | Novare Surgical Systems, Inc. | Articulating mechanism for remote manipulation of a surgical or diagnostic tool |
| US7686826B2 (en) * | 2003-10-30 | 2010-03-30 | Cambridge Endoscopic Devices, Inc. | Surgical instrument |
| JP2005296412A (ja) * | 2004-04-13 | 2005-10-27 | Olympus Corp | 内視鏡治療装置 |
| JP2005328882A (ja) * | 2004-05-18 | 2005-12-02 | Olympus Corp | 内視鏡用処置具及び内視鏡システム |
-
2007
- 2007-03-20 AU AU2007201204A patent/AU2007201204B2/en not_active Ceased
- 2007-03-22 JP JP2007075136A patent/JP5449653B2/ja not_active Expired - Fee Related
- 2007-03-23 BR BRPI0704599 patent/BRPI0704599A/pt not_active Application Discontinuation
- 2007-03-23 CN CN 200710089656 patent/CN101040772A/zh active Pending
- 2007-03-23 MX MX2007003575A patent/MX2007003575A/es active IP Right Grant
Also Published As
| Publication number | Publication date |
|---|---|
| AU2007201204B2 (en) | 2012-07-12 |
| CN101040772A (zh) | 2007-09-26 |
| AU2007201204A1 (en) | 2007-10-11 |
| JP2007252921A (ja) | 2007-10-04 |
| MX2007003575A (es) | 2008-11-27 |
| BRPI0704599A (pt) | 2008-05-06 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5449653B2 (ja) | 関節運動する内視鏡付属チャネル | |
| JP5345291B2 (ja) | 関節運動を制御するための方法および装置 | |
| JP5340553B2 (ja) | 模倣エンドエフェクタを備える外科用留め具およびカッター | |
| US8236010B2 (en) | Surgical fastener and cutter with mimicking end effector | |
| US20110163146A1 (en) | Surgical Stapling And Cuttting Device | |
| AU2012223473B2 (en) | A surgical stapling and cutting device | |
| HK1107511A (en) | Articulating endoscopic accessory channel | |
| HK1107510A (en) | Surgical fastener and cutter with mimicking end effector | |
| HK1107510B (en) | Surgical fastener and cutter with mimicking end effector | |
| HK1107664B (en) | Devices for controlling articulation of surgical instruments |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20071130 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20081107 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20100319 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20120229 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120306 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20120606 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20120611 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20120706 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20120711 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120806 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120828 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20121025 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20121204 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130326 |
|
| A911 | Transfer to examiner for re-examination before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20130405 |
|
| A912 | Re-examination (zenchi) completed and case transferred to appeal board |
Free format text: JAPANESE INTERMEDIATE CODE: A912 Effective date: 20130628 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20131225 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5449653 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |