JP5476776B2 - トロリ線検測装置 - Google Patents
トロリ線検測装置 Download PDFInfo
- Publication number
- JP5476776B2 JP5476776B2 JP2009094530A JP2009094530A JP5476776B2 JP 5476776 B2 JP5476776 B2 JP 5476776B2 JP 2009094530 A JP2009094530 A JP 2009094530A JP 2009094530 A JP2009094530 A JP 2009094530A JP 5476776 B2 JP5476776 B2 JP 5476776B2
- Authority
- JP
- Japan
- Prior art keywords
- range sensor
- coordinates
- trolley
- range
- vehicle
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images











Landscapes
- Length Measuring Devices By Optical Means (AREA)
- Current-Collector Devices For Electrically Propelled Vehicles (AREA)
Description
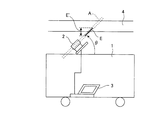
図1に示すように、本実施例に係るトロリ線検測装置は、車両1の屋根上にトロリ線4を測定可能に設置された測域センサ2と、車両1の内部に設置された演算装置3とを備えて構成されている。

E’=Esinθ ・・・(5)
E’=Esin45°=±21.21… ・・・(6)
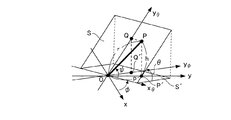
図8に示すように、本実施例は上述した実施例1及び実施例2の構成を組み合わせたものである。即ち、本実施例において測域センサ2は、そのスキャン平面Sが車両1の進行方向に直交する面に対して鉛直方向に平行な軸周りに角度φだけ傾斜しているとともに、水平面に対して車両1の幅方向に平行な軸周りに角度θだけ傾斜するようにその設置角度を設定されている。
r2=p2+h2 ・・・(8)
rsinψsinθ=h ・・・(14)
x=rcosψcosφ−rsinψsinφcosθ ・・・(16)
y=rsinψsinθ ・・・(17)
2 測域センサ
3 演算装置
31 制御部
32 第一メモリ
33 検出範囲抽出部
34 第二メモリ
35 トロリ線座標検出部
36 第三メモリ
37 ログ出力部
38 ログ
4 トロリ線
A 測定範囲
B 検出範囲
S スキャン平面
Claims (3)
- 車両の屋根上に設置される測域センサと、前記車両の内部に設置される演算装置とを備え、前記測域センサの検出結果に基づいて前記演算装置によりトロリ線の高さ及び偏位を求めるトロリ線検測装置であって、前記演算装置が、前記測域センサの操作を行う制御手段と、前記測域センサによって測定した測定対象物の位置を直交座標に変換した後、予め設定した検出範囲内にある測定対象物のみを抽出してその座標を求める検出範囲抽出手段と、前記検出範囲抽出手段において、前記検出範囲内にある測定対象物のみを抽出して求めた前記座標から、トロリ線候補座標を検出するトロリ線座標検出手段と、トロリ線座標を特定のフォーマットで出力するログ出力手段とを備え、
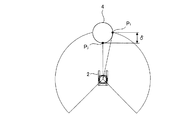
前記測域センサが、そのスキャン平面が前記車両の進行方向に直交する面に対して鉛直方向に平行な軸回りで傾斜角φを有するようにその設置角度を設定され、該傾斜角φを
rmax・sinω<a/cosφ
(ただし、rmaxは前記測域センサから前記トロリ線までの距離の最大値、ωは前記測域センサの角度分解能、aは前記トロリ線の半径)
とし、前記測域センサから前記トロリ線までの距離rが前記測域センサの測定可能距離を超えないものとすることを特徴とするトロリ線検測装置。 - 車両の屋根上に設置される測域センサと、前記車両の内部に設置される演算装置とを備え、前記測域センサの検出結果に基づいて前記演算装置によりトロリ線の高さ及び偏位を求めるトロリ線検測装置であって、前記演算装置が、前記測域センサの操作を行う制御手段と、前記測域センサによって測定した測定対象物の位置を直交座標に変換した後、予め設定した検出範囲内にある測定対象物のみを抽出してその座標を求める検出範囲抽出手段と、前記測域センサによる一回のスキャンにおいて検出される複数の前記測定対象物の座標からトロリ線候補座標を検出するトロリ線座標検出手段と、トロリ線座標を特定のフォーマットで出力するログ出力手段とを備え、
前記測域センサが、そのスキャン平面が前記車両の進行方向に直交する面に対して前記車両の幅方向に平行な軸回りで傾斜角を有するようにその設置角度を設定されたことを特徴とするトロリ線検測装置。 - 車両の屋根上に設置される測域センサと、前記車両の内部に設置される演算装置とを備え、前記測域センサの検出結果に基づいて前記演算装置によりトロリ線の高さ及び偏位を求めるトロリ線検測装置であって、前記演算装置が、前記測域センサの操作を行う制御手段と、前記測域センサによって測定した測定対象物の位置を直交座標に変換した後、予め設定した検出範囲内にある測定対象物のみを抽出してその座標を求める検出範囲抽出手段と、前記測域センサによる一回のスキャンにおいて検出される複数の前記測定対象物の座標からトロリ線候補座標を検出するトロリ線座標検出手段と、トロリ線座標を特定のフォーマットで出力するログ出力手段とを備え、
前記測域センサが、そのスキャン平面が前記車両の進行方向に直交する面に対して鉛直方向に平行な軸回りで傾斜角を有するとともに、前記車両の幅方向に平行な軸回りで傾斜角を有するようにその設置角度を設定されたことを特徴とするトロリ線検測装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009094530A JP5476776B2 (ja) | 2009-04-09 | 2009-04-09 | トロリ線検測装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009094530A JP5476776B2 (ja) | 2009-04-09 | 2009-04-09 | トロリ線検測装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010243417A JP2010243417A (ja) | 2010-10-28 |
| JP5476776B2 true JP5476776B2 (ja) | 2014-04-23 |
Family
ID=43096576
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2009094530A Expired - Fee Related JP5476776B2 (ja) | 2009-04-09 | 2009-04-09 | トロリ線検測装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5476776B2 (ja) |
Families Citing this family (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103307994B (zh) * | 2013-06-03 | 2015-11-25 | 上海电器科学研究所(集团)有限公司 | 一种电动汽车充电桩机械性能测试方法 |
| JP6225362B2 (ja) | 2013-11-11 | 2017-11-08 | 株式会社明電舎 | 電車の自己位置推定装置 |
| JP6236688B2 (ja) * | 2013-11-11 | 2017-11-29 | 株式会社明電舎 | 時系列フィルタ処理による架線類検測装置 |
| JP2015178979A (ja) * | 2014-03-19 | 2015-10-08 | 東海旅客鉄道株式会社 | 電車線設備の位置検出装置 |
| CN105333824A (zh) * | 2015-10-22 | 2016-02-17 | 中国计量学院 | 一种基于片光的货车侧面防护装置安装尺寸测量系统及测量方法 |
| JP6696207B2 (ja) * | 2016-02-18 | 2020-05-20 | 株式会社明電舎 | 架線位置測定装置及び架線位置測定方法 |
| JP6531051B2 (ja) * | 2016-02-29 | 2019-06-12 | 日本電信電話株式会社 | 設備状態検出方法および装置 |
| JP7374835B2 (ja) * | 2020-03-30 | 2023-11-07 | 日鉄テックスエンジ株式会社 | 架線とパンタグラフの相対位置監視装置 |
| CN111896044A (zh) * | 2020-06-09 | 2020-11-06 | 山东信通电子股份有限公司 | 一种铁路接触网补偿装置的监测方法及设备 |
| CN113063362B (zh) * | 2021-04-07 | 2023-05-09 | 湖南凌翔磁浮科技有限责任公司 | 非接触式的磁浮列车转向架间距检测方法 |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3204797B2 (ja) * | 1993-04-26 | 2001-09-04 | 日立電子エンジニアリング株式会社 | レーザー反射光を用いたトロリ線摩耗量の算出方法 |
| JP3815019B2 (ja) * | 1998-01-20 | 2006-08-30 | 株式会社デンソー | 車種判別装置 |
| JP2001050723A (ja) * | 1999-08-11 | 2001-02-23 | Minolta Co Ltd | 距離測定装置 |
| JP2001051058A (ja) * | 1999-08-11 | 2001-02-23 | Minolta Co Ltd | 距離測定装置 |
| JP3699320B2 (ja) * | 2000-02-23 | 2005-09-28 | 財団法人鉄道総合技術研究所 | パンタグラフ変位並びに接触力及びトロリ線偏位の測定装置 |
| JP4085588B2 (ja) * | 2001-03-22 | 2008-05-14 | 株式会社明電舎 | パンタグラフ測定装置 |
| JP2003057342A (ja) * | 2001-08-20 | 2003-02-26 | Nikon Corp | 測距装置および測距方法 |
| JP2006123787A (ja) * | 2004-10-29 | 2006-05-18 | Railway Technical Res Inst | トロリ線の高さ・偏位測定装置 |
| JP4714104B2 (ja) * | 2006-07-31 | 2011-06-29 | 富士重工業株式会社 | 物体傾き検出装置 |
| JP4923942B2 (ja) * | 2006-10-20 | 2012-04-25 | 株式会社明電舎 | 画像処理によるパンタグラフ測定装置 |
-
2009
- 2009-04-09 JP JP2009094530A patent/JP5476776B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2010243417A (ja) | 2010-10-28 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5476776B2 (ja) | トロリ線検測装置 | |
| CN102232173B (zh) | 用于对场景进行光学扫描和测量的方法 | |
| JP6069639B2 (ja) | 線条測定装置 | |
| JP6669294B1 (ja) | パンタグラフ変位測定装置及びトロリ線硬点検出方法 | |
| JP2010044050A (ja) | レーザレーダの姿勢認識方法及びレーザレーダ | |
| JP5418176B2 (ja) | パンタグラフ高さ測定装置及びそのキャリブレーション方法 | |
| JP7452682B2 (ja) | 検査システム、抽出装置、検査方法及びプログラム | |
| KR101576583B1 (ko) | 스태커의 위치변화에 따른 야적파일 측위방법 및 장치 | |
| WO2014024812A1 (ja) | レーザ測定による支持物検知装置 | |
| WO2016047510A1 (ja) | 線条計測装置及びその方法 | |
| JP2016142540A (ja) | トロリ線摩耗測定装置およびトロリ線摩耗測定方法 | |
| WO2018051738A1 (ja) | 碍子検出装置及び碍子検出方法 | |
| CN110127521B (zh) | 钢卷中心坐标检测装置及其方法 | |
| JP2011033428A (ja) | パンタグラフ高さ測定装置 | |
| JP6673688B2 (ja) | 計測方法および計測用プログラム | |
| JP2015225055A (ja) | 画像処理によるトロリ線摩耗測定装置及びその方法 | |
| JP6526465B2 (ja) | 真円度測定装置 | |
| RU2593425C2 (ru) | Способ и устройство для измерения центричности токопроводящей жилы в изоляционной оболочке | |
| US10900776B2 (en) | Sensor device for distance offset measurements | |
| JP7166582B2 (ja) | 車両周囲認識センサ検査システム、車両周囲認識センサ検査方法 | |
| TWI644851B (zh) | Steel coil center coordinate detecting device and method thereof | |
| JP2020169903A (ja) | トンネル内周面変位計測装置及びトンネル内周面変位計測方法 | |
| EP2159534A1 (en) | Eccentricity gauge for wire and cable and method for measuring concentricity | |
| JP7097334B2 (ja) | 吊具の位置の測定方法および測定装置および吊具 | |
| JPH11142124A (ja) | レ−ルの断面形状測定方法及び装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20111209 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20130205 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130226 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130422 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20140114 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20140127 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5476776 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |