JP5545007B2 - 携帯型端末器及びその通信制御方法 - Google Patents
携帯型端末器及びその通信制御方法 Download PDFInfo
- Publication number
- JP5545007B2 JP5545007B2 JP2010097942A JP2010097942A JP5545007B2 JP 5545007 B2 JP5545007 B2 JP 5545007B2 JP 2010097942 A JP2010097942 A JP 2010097942A JP 2010097942 A JP2010097942 A JP 2010097942A JP 5545007 B2 JP5545007 B2 JP 5545007B2
- Authority
- JP
- Japan
- Prior art keywords
- state
- determination
- determined
- portable terminal
- current cycle
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images











Landscapes
- Navigation (AREA)
- Traffic Control Systems (AREA)
- Telephone Function (AREA)
Description
ら携帯型端末器の位置を判断し、一定時間内における位置の変化量が閾値を超えない場合に、携帯型端末器が落し物であると判断している。加えて、携帯型端末器は、自己が落し物であると判断された場合、その位置情報の送信を禁止する(特許文献1参照)。
ら、携帯型端末器が移動状態であるか静止状態であるかを判定するための判定領域を設定し、今回周期の位置が判定領域内に存在する割合が所定割合より大きい場合、又は、所定回数連続して今回周期の位置が判定領域内に存在すると判定された場合、自己が静止状態であると判断する。このように、判定領域を設定し、その領域内に位置する割合又は連続性から携帯型端末器が移動状態であるか静止状態であるかを判断するため、今回周期の1回だけなどのようにGPSの測位誤差によって静止状態であるにも拘わらず移動状態と判断される可能性が低減されることとなる。これにより、より精度良く静止状態を判断でき、無駄な通信を抑えることができる。従って、無駄な通信の頻度を低減して電力消費量を低減することができる。
置12は、位置特定装置11により検出された位置の情報を送信するものであって、例えば通信アンテナや通信制御を行うためのプログラムを実行するCPU等によって構成されている。
ると判定された割合が所定割合より大きい場合、又は、位置判定部14bにより所定回数連続して今回周期の位置が判定領域T内に存在すると判定された場合、携帯型端末器10が静止状態であると判断するものである。一方、状態判断部14cは、位置判定部14bにより今回周期の位置が判定領域T内に存在すると判定された割合が所定割合以下である場合、又は、今回周期の位置が判定領域T内に存在することが、位置判定部14bにより所定回数連続して判定されなかった場合、携帯型端末器10が移動状態であると判断するものである。このように、状態判断部14cは、判定領域T内に位置する割合又は連続性から携帯型端末器10が移動状態であるか静止状態であるかを判断するため、今回周期の1回だけなどのようにGPSの測位誤差によって静止状態であるにも拘わらず移動状態と判断される可能性が低減されることとなる。
ば、GPS衛星からの電波を受信するためのアンテナや、受信した電波に基づいて自己位置を算出するためのプログラムを実行するCPU等によって構成されている。通信装置32は、位置特定装置11により検出された位置の情報を送信するものであって、例えば通信アンテナや通信制御を行うためのプログラムを実行するCPU等によって構成されている。
される過去の位置情報がX回以上でないと判断した場合(S11:NO)、第2状態判断部14dは、携帯型端末器10が移動中であると判断する(S12)。そして、図9に示す処理は終了し、処理は図8のステップS3に移行する。
と判断する(S23)。その後、図10に示す処理は終了し、処理は図8に示すステップS4に移行する。
存在すると判定された割合が規定割合以下であるとき、又は、今回周期の位置が判定領域T外に存在することが、位置判定部14bにより規定回数連続して判定されなかったときに、移動状態に移行すべきでないと判断する(S30:NO)。そして、状態判断部14cは、携帯型端末器10が通常状態であると判断する(S32)。その後、図10に示す処理は終了し、処理は図8に示すステップS4に移行する。
V=(|P11−P12|)/S
D(P11→P10)=D(P12→P11)
P10=P11+V・S・D(P11→P10)
なる演算式により、今回周期の携帯型端末器10の位置P10を推定する。ここで、Vは携帯型端末器10の推定速度であり、Sは位置の検出周期である。また、Dは携帯型端末器10の推定移動方向である。
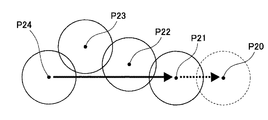
V=(|P21−P24|)/(S・(tp21−tp24))
D(P21→P20)=D(P24→P21)
P20=P21+V・S・D(P21→P20)
なる演算式により、今回周期の携帯型端末器10の位置P20を推定する。ここで、Vは携帯型端末器10の推定速度であり、Sは位置の検出周期である。また、Dは携帯型端末器10の推定移動方向である。さらに、tは、何個目の位置情報であるかを示す数である。
V=((|P31−P32|)+(|P32−P33|)+(|P33−P34|))/(S・(tp31−tp34))
D(P31→P30)=D(P34→P33)+D(P33→P32)+D(P32→P31)
P30=P31+V・S・D(P31→P30)
なる演算式により、今回周期の携帯型端末器10の位置P30を推定する。ここで、Vは携帯型端末器10の推定速度であり、Sは位置の検出周期である。また、Dは携帯型端末器10の推定移動方向である。さらに、tは、何個目の位置情報であるかを示す数である。
中であると判断した場合(S54:YES)、通信装置12は、ステップS1において検出された位置情報の送信を中止する(S52)。その後、図15に示す処理は終了する。
状態であると判断され、且つ、静止中であると判断されていたときに、検出された位置の情報について送信を中止する。このため、移動状態と静止状態との中間の状態を示す通常状態である場合であっても、今回周期の位置から静止中と判断できる場合、携帯型端末器10が移動している可能性は低く、位置の情報について送信を中止する。これにより、一層無駄な通信の頻度を低減して電力消費量を低減することができる。
10…携帯型端末器
11…位置特定装置(位置検出手段)
12…通信装置(通信手段)
13…位置情報蓄積装置(位置履歴保存手段)
14…処理装置
14a…判定領域設定部(判定領域設定手段)
14b…位置判定部(位置判定手段)
14c…状態判断部(状態判断手段)
14d…第2状態判断部(第2状態判断手段)
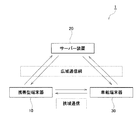
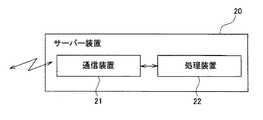
20…サーバー装置
21…通信装置
22…処理装置
30…車載端末器
31…位置特定装置
32…通信装置
33…処理装置
34…情報提供装置
T…判定領域
Claims (7)
- 歩行者が携帯する携帯型端末器であって、
所定周期毎に自己位置を検出する位置検出手段と、
前記位置検出手段により検出された位置の情報を送信する通信手段と、
前記位置検出手段により検出された、今回周期の直前の所定数分の位置の情報を履歴データとして保存する位置履歴保存手段と、
前記位置履歴保存手段により保存された履歴データと予め予測されるグローバルポジショニングシステムによる測位誤差とに応じて、自己が移動状態であるか静止状態であるかを判定するための判定領域を設定する判定領域設定手段と、
前記位置検出手段により検出された今回周期の位置が前記判定領域設定手段により設定された判定領域内に存在するか否かを判定する位置判定手段と、
前記位置判定手段により前記今回周期の位置が前記判定領域内に存在すると判定された割合が所定割合より大きい場合、又は、前記位置判定手段により所定回数連続して前記今回周期の位置が前記判定領域内に存在すると判定された場合、自己が静止状態であると判断する状態判断手段と、を備え、
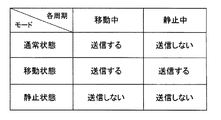
前記通信手段は、前記状態判断手段により静止状態であると判断された場合、前記位置検出手段により検出された位置の情報について送信を中止し、
前記状態判断手段は、前回判断時に静止状態であると判断された場合に、前記位置判定手段により前記今回周期の位置が前記判定領域内に存在すると判定された割合が所定割合以下であるとき、又は、前記今回周期の位置が前記判定領域内に存在することが、前記位置判定手段により所定回数連続して判定されなかったときに、自己が移動状態であると判断し、
前記状態判断手段は、前回判断時に移動状態であると判断された場合に、前記位置判定手段により前記今回周期の位置が前記判定領域外に存在すると判定された割合が規定割合以下であるとき、又は、前記今回周期の位置が前記判定領域外に存在することが、前記位置判定手段により規定回数連続して判定されなかったときに、自己が移動状態と静止状態との中間の状態であって、前記自己が移動しているか静止しているかを判断し難い状態を示す通常状態であると判断することを特徴とする携帯型端末器。 - 前記状態判断手段は、前回判断時に通常状態であると判断された場合に、前記位置判定手段により前記今回周期の位置が前記判定領域内に存在すると判定された割合が所定割合より大きいとき、又は、前記位置判定手段により所定回数連続して前記今回周期の位置が前記判定領域内に存在すると判定されたときに、自己が静止状態であると判断することを特徴とする請求項1に記載の携帯型端末器。
- 前記位置判定手段により前記今回周期の位置が前記判定領域外に存在する場合、移動中であると判断すると共に、前記今回周期の位置が前記判定領域外に存在しない場合、静止中であると判断する第2状態判断手段をさらに備え、
前記通信手段は、前記状態判断手段により自己が通常状態であると判断され、且つ、前記第2状態判断手段により静止中であると判断されていたときに、前記位置検出手段により検出された位置の情報について送信を中止することを特徴とする請求項1又は2に記載の携帯型端末器。 - 前記状態判断手段は、前回判断時に移動状態であると判断された場合に、前記位置判定手段により前記今回周期の位置が前記判定領域外に存在すると判定された割合が規定割合より大きいとき、又は、前記位置判定手段により規定回数連続して前記今回周期の位置が前記判定領域外に存在すると判定されたときに、自己が移動状態であると判断する請求項1〜3のいずれか一項請求項1又は2に記載の携帯型端末器。
- 前記判定領域設定手段は、前記状態判断手段により静止状態以外の状態と判断され、その後静止状態と判断された場合、設定している判定領域の位置を固定する
ことを特徴とする請求項1〜4のいずれか一項に記載の携帯型端末器。 - 前記位置検出手段は、グローバルポジショニングシステムの衛星から受信する電波のレベルが規定値に満たない場合、前記履歴データとして保存される過去の位置から、今回周期の位置を推定することを特徴とする請求項1〜5のいずれか一項に記載の携帯型端末器。
- 歩行者が携帯する携帯型端末器の通信制御方法であって、
位置検出手段が、所定周期毎に自己位置を検出する位置検出工程と、
通信手段が、前記検出された位置の情報を送信する通信工程と、
判定領域設定手段が、所定周期毎うち今回周期の直前の所定数分の位置の情報が保存された履歴データと予め予測されるグローバルポジショニングシステムによる測位誤差とに応じて、自己が移動状態であるか静止状態であるかを判定するための判定領域を設定する判定領域設定工程と、
位置判定手段が、検出された今回周期の位置が前記判定領域設定工程において設定された判定領域内に存在するか否かを判定する位置判定工程と、
状態判断手段が、前記位置判定工程において前記今回周期の位置が前記判定領域内に存在すると判定された割合が所定割合より大きい場合、又は、前記位置判定工程において所定回数連続して前記今回周期の位置が前記判定領域内に存在すると判定された場合、前記携帯型端末器が静止状態であると判断する状態判断工程と、
前記状態判断工程において静止状態であると判断された場合、検出された位置の情報について、前記通信手段に送信を中止させる送信中止工程と、を有し
前記状態判断工程において、前回判断時に静止状態であると判断された場合に、前記位置判定工程により前記今回周期の位置が前記判定領域内に存在すると判定された割合が所定割合以下であるとき、又は、前記今回周期の位置が前記判定領域内に存在することが、前記位置判定工程により所定回数連続して判定されなかったときに、自己が移動状態であると判断し、
前記状態判断工程において、前回判断時に移動状態であると判断された場合に、前記位置判定工程により前記今回周期の位置が前記判定領域外に存在すると判定された割合が規定割合以下であるとき、又は、前記今回周期の位置が前記判定領域外に存在することが、前記位置判定工程により規定回数連続して判定されなかったときに、自己が移動状態と静止状態との中間の状態であって、前記自己が移動しているか静止しているかを判断し難い状態を示す通常状態であると判断することを特徴とする携帯型端末器の通信制御方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010097942A JP5545007B2 (ja) | 2010-04-21 | 2010-04-21 | 携帯型端末器及びその通信制御方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010097942A JP5545007B2 (ja) | 2010-04-21 | 2010-04-21 | 携帯型端末器及びその通信制御方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2011227763A JP2011227763A (ja) | 2011-11-10 |
| JP5545007B2 true JP5545007B2 (ja) | 2014-07-09 |
Family
ID=45043020
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010097942A Expired - Fee Related JP5545007B2 (ja) | 2010-04-21 | 2010-04-21 | 携帯型端末器及びその通信制御方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5545007B2 (ja) |
Families Citing this family (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5834868B2 (ja) * | 2011-12-13 | 2015-12-24 | トヨタ自動車株式会社 | 歩車間通信システム、無線通信端末、および歩車間通信方法 |
| JP6079034B2 (ja) * | 2012-08-07 | 2017-02-15 | セイコーエプソン株式会社 | 停止継続判定方法及び停止継続判定装置 |
| JP6100553B2 (ja) * | 2013-02-20 | 2017-03-22 | Necプラットフォームズ株式会社 | 情報処理装置、情報処理装置制御方法および情報処理装置制御プログラム |
| JP6101601B2 (ja) * | 2013-08-26 | 2017-03-22 | 株式会社Nttドコモ | 情報処理装置及び位置測位方法 |
| JP6697279B2 (ja) * | 2016-02-05 | 2020-05-20 | ヤフー株式会社 | 判定プログラム、判定装置、判定システム、及び判定方法 |
| JP2017162384A (ja) * | 2016-03-11 | 2017-09-14 | 株式会社東芝 | 測位システム、端末装置、サーバ装置、および測位方法 |
| JP7068152B2 (ja) * | 2018-12-07 | 2022-05-16 | ヤフー株式会社 | 補正装置、補正方法、および補正プログラム |
| EP4332931A4 (en) | 2021-04-27 | 2025-06-11 | Kubota Corporation | IMPLEMENTATION MACHINE MONITORING SYSTEM |
| JP7472075B2 (ja) * | 2021-04-27 | 2024-04-22 | 株式会社クボタ | 作業機の監視システム |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004013534A (ja) * | 2002-06-06 | 2004-01-15 | Mitsubishi Electric Corp | 盗難通報装置、及び、盗難通報システム |
| JP3714328B2 (ja) * | 2003-01-17 | 2005-11-09 | トヨタ自動車株式会社 | 通信装置及び車両用運転補助装置 |
| JP4203851B2 (ja) * | 2003-06-17 | 2009-01-07 | マツダ株式会社 | 走行支援システム及び車載端末器 |
| JP2005331370A (ja) * | 2004-05-20 | 2005-12-02 | Sony Corp | 測位装置における停止判断方法および測位装置 |
| JP2009264853A (ja) * | 2008-04-23 | 2009-11-12 | Canvas Mapple Co Ltd | 車両停止判定装置、車両停止判定方法、及び車両停止判定プログラム |
-
2010
- 2010-04-21 JP JP2010097942A patent/JP5545007B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2011227763A (ja) | 2011-11-10 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5545007B2 (ja) | 携帯型端末器及びその通信制御方法 | |
| US11778434B2 (en) | Method and system for integratedly managing vehicle operation state | |
| JP4973380B2 (ja) | 交通安全システム | |
| CN103229568A (zh) | 提供位置信息的装置和方法 | |
| JP2009251758A (ja) | 歩車間通信装置、携帯端末 | |
| WO2015079630A1 (ja) | 運転支援ユニット及び運転支援システム | |
| JP2017092533A (ja) | 車載機およびユーザ接近離隔推定システム | |
| JP5652342B2 (ja) | 歩行者端末装置、コンピュータプログラム、及び、無線通信方法 | |
| US20250324228A1 (en) | Method and system for integratedly managing vehicle operation state | |
| US20240334346A1 (en) | Communication device | |
| JP5024414B2 (ja) | 車載無線端末 | |
| JP2015064733A (ja) | 運転支援装置及び運転支援方法 | |
| JP2016169974A (ja) | 位置測定装置、位置測定方法、プログラム、および位置測定システム | |
| JP4110167B2 (ja) | 乗物用電子キー装置 | |
| JP4164805B2 (ja) | 走行支援システム及び車載端末器 | |
| JP5810898B2 (ja) | 車両姿勢推定装置、及び、盗難通知装置 | |
| CN107211252B (zh) | 车辆用通信机 | |
| JPWO2018216058A1 (ja) | 位置推定装置、位置推定方法及び位置推定プログラム | |
| JP4735480B2 (ja) | 車両位置検出システム | |
| JP2016109487A (ja) | 相対位置測定装置、プログラム | |
| JP6022926B2 (ja) | 端末装置および無線通信システム | |
| US10743139B2 (en) | Wireless system device and wireless communication control method | |
| JP5082408B2 (ja) | 移動体位置監視システムの移動体端末 | |
| JP2011080934A (ja) | 位置測定装置 | |
| JP2009104414A (ja) | 歩車間通信システム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20130227 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140204 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140317 |
|
| RD02 | Notification of acceptance of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7422 Effective date: 20140317 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20140415 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20140428 |
|
| LAPS | Cancellation because of no payment of annual fees |