JP5554681B2 - 物体表面の高さマップを求める方法及びその装置 - Google Patents
物体表面の高さマップを求める方法及びその装置 Download PDFInfo
- Publication number
- JP5554681B2 JP5554681B2 JP2010235715A JP2010235715A JP5554681B2 JP 5554681 B2 JP5554681 B2 JP 5554681B2 JP 2010235715 A JP2010235715 A JP 2010235715A JP 2010235715 A JP2010235715 A JP 2010235715A JP 5554681 B2 JP5554681 B2 JP 5554681B2
- Authority
- JP
- Japan
- Prior art keywords
- height
- height map
- signal
- difference
- map
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images





Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B9/00—Measuring instruments characterised by the use of optical techniques
- G01B9/02—Interferometers
- G01B9/0209—Low-coherence interferometers
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B9/00—Measuring instruments characterised by the use of optical techniques
- G01B9/02—Interferometers
- G01B9/02083—Interferometers characterised by particular signal processing and presentation
- G01B9/02084—Processing in the Fourier or frequency domain when not imaged in the frequency domain
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- Signal Processing (AREA)
- Mathematical Physics (AREA)
- Instruments For Measurement Of Length By Optical Means (AREA)
- Length Measuring Devices By Optical Means (AREA)
Description
である。
である。
2 広帯域光源
3 光
3a 第1の部分的な光ビーム
3b 第2の部分的な光ビーム
4a レンズ
4b ビームスプリッタ
4c 第2のレンズ
4d レンズ系
5 ビームスプリッタ
6 サンプルの表面
7 サンプル
8 参照鏡
9 参照面
10 画像デバイス
Claims (13)
- 広帯域光源による白色光干渉法を用いて物体表面の高さマップを求める方法であって、
前記物体表面上の各位置の高さを求めるステップにおいて、
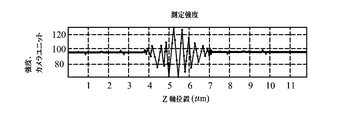
白色光干渉法を用いて、前記物体に対し対物レンズの焦点面を高さ方向に走査して干渉パターンの強度信号を得るステップと、
前記物体表面上の各位置について前記強度信号の振幅が最大となる前記高さ方向の位置を推定して、当該高さ方向の位置から前記物体表面上の各位置の高さを求めるステップと、を有し、
前記強度信号が最大となる高さ方向の位置を推定するステップは、
前記強度信号をフーリエ変換するステップと、
前記フーリエ変換された信号をフィルタリングしてノイズ信号を取り除くステップと、
前記フィルタリングされた信号を逆フーリエ変換するステップと、
前記逆フーリエ変換された信号の重心の位置を求めて、当該重心の位置を前記高さ方向の位置とするステップと、を有し、
前記逆フーリエ変換された信号の大きさを、前記信号の重心の位置を計算する前に、1〜2(双方の値を含む)乗し、好ましくは1.8乗する、方法。 - 広帯域光源による白色光干渉法を用いて物体表面の高さマップを求める方法であって、
前記物体表面上の各位置の高さを求めるステップにおいて、
白色光干渉法を用いて、前記物体に対し対物レンズの焦点面を高さ方向に走査して干渉パターンの強度信号を得るステップと、
前記物体表面上の各位置について前記強度信号の振幅が最大となる前記高さ方向の位置を推定して、当該高さ方向の位置から前記物体表面上の各位置の高さを求めるステップと、を有し、
前記強度信号が最大となる高さ方向の位置を推定するステップは、
前記強度信号をフーリエ変換するステップと、
前記フーリエ変換された信号をフィルタリングしてノイズ信号を取り除くステップと、
前記フィルタリングされた信号を逆フーリエ変換するステップと、
前記逆フーリエ変換された信号の重心の位置を求めて、当該重心の位置を前記高さ方向の位置とするステップと、を有し、
前記重心の位置が、重心が配置されている箇所に最も近い像の数を用いて計算される、方法。 - 広帯域光源による白色光干渉法を用いて物体表面の高さマップを求める方法であって、
前記物体表面上の各位置の高さを求めるステップにおいて、
白色光干渉法を用いて、前記物体に対し対物レンズの焦点面を高さ方向に走査して干渉パターンの強度信号を得るステップと、
前記物体表面上の各位置について前記強度信号の振幅が最大となる前記高さ方向の位置を推定して、当該高さ方向の位置から前記物体表面上の各位置の高さを求めるステップと、を有し、
前記強度信号が最大となる高さ方向の位置を推定するステップは、
前記強度信号をフーリエ変換するステップと、
前記フーリエ変換された信号をフィルタリングしてノイズ信号を取り除くステップと、
前記フィルタリングされた信号を逆フーリエ変換するステップと、
前記逆フーリエ変換された信号の重心の位置を求めて、当該重心の位置を前記高さ方向の位置とするステップと、を有し、
前記強度信号の位相を示す位相信号を求めるステップと、
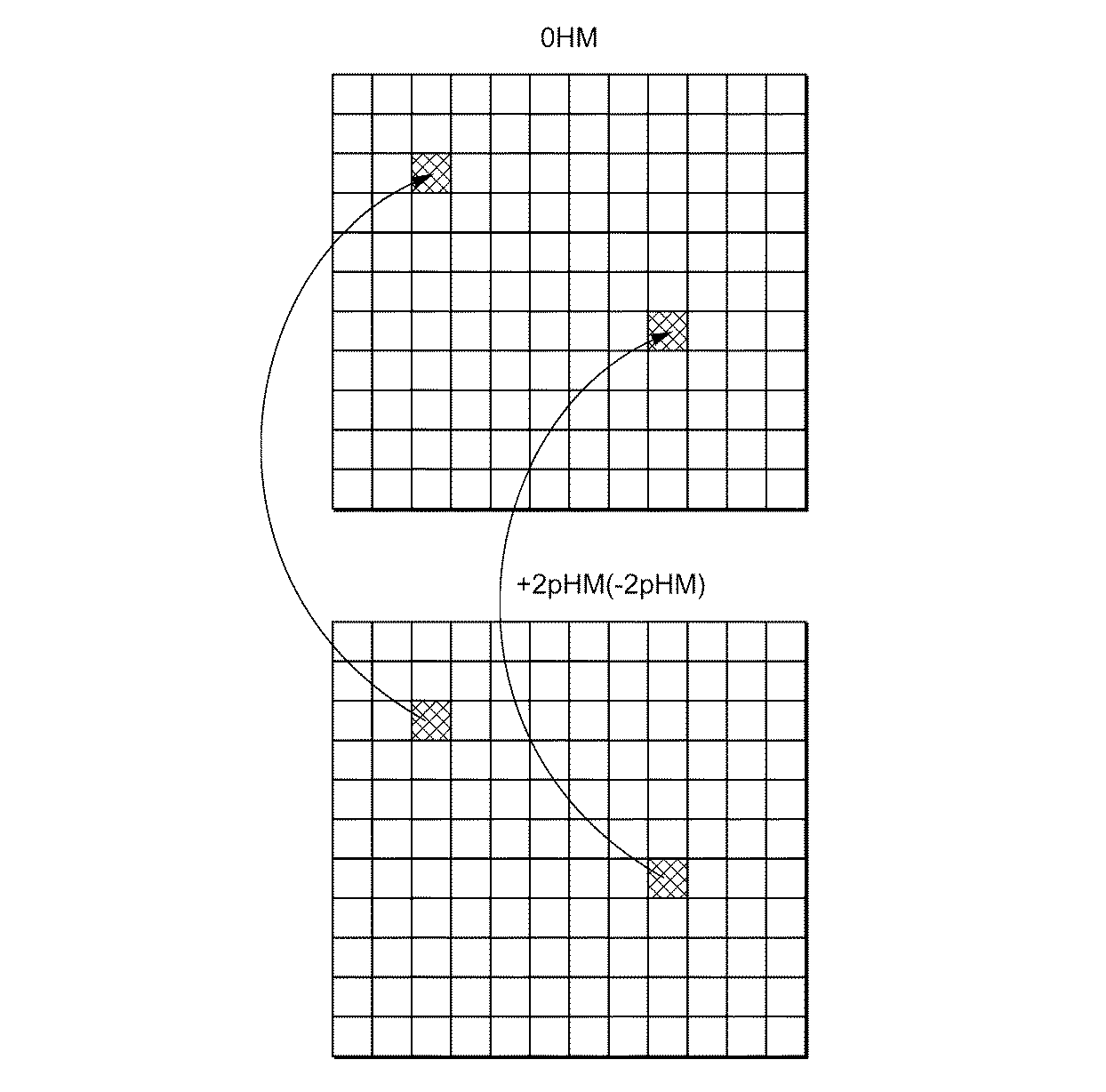
前記重心の位置に最も近い前記位相信号のゼロ交差の位置から前記物体表面上の各位置の高さを求めるステップと、
前記ゼロ交差に対する2πn交差と−2πn交差(nは整数)の位置から前記物体表面上の各位置の高さを求めるステップと、をさらに有する、方法。 - 前記強度信号の位相を示す位相信号を求めるステップは、
前記強度信号をフーリエ変換するステップと、
前記フーリエ変換された信号を、予め定められた周波数範囲外にある全ての周波数を排除しかつ前記範囲内の周波数を関数によって重み付けするように適合されたフィルタにかけるステップと、
このフィルタリングされた信号を逆フーリエ変換するステップと、
前記逆フーリエ変換された信号から位相信号を計算するステップと、を有する、請求項3に記載の方法。 - 前記予め定められた範囲内の前記周波数がフィルタによって重み付けされる、請求項4に記載の方法。
- 前記強度信号の位相を示す位相信号を求めるステップは、
複素ウェーブレットを選択するステップと、
前記強度信号に対し、前記重心の位置近くのウェーブレット変換を行うステップと、
このウェーブレット変換が行われた信号から位相信号を計算するステップと、を有する、請求項3に記載の方法。 - 前記ゼロ交差の位置から求められた前記物体表面の各位置の高さから、第1の高さマップを求めるステップと、
前記2πn交差および−2πn交差の位置から求められた前記物体表面の各位置の高さから、第2および第3の高さマップを求めるステップと、
コヒーレンス法による前記重心の位置から求められた前記物体表面の各位置の高さから、高さマップを求めるステップと、
前記第1の高さマップの一部を前記第2の高さマップと組み合わせて、ジャンプが最小数の高さマップを求めるステップと、
前記第1の高さマップの一部を前記第3の高さマップと組み合わせて、ジャンプが最小数の高さマップを求めるステップと、
前記組み合せられた高さマップから、コヒーレンス法を用いて求められた前記高さマップに近い高さマップを選択するステップと、を有する、請求項4、5または6に記載の方法。 - 前記コヒーレンス法を用いて求められた前記高さマップをフィルタリングして雑音を低減するステップと、
前記フィルタリングされた前記高さマップと前記第1の高さマップとの間の第1の差を取るステップと
前記第1の高さマップと前記第2の高さマップとの間の第2の差を取るステップと、
前記第2の差を基準とした基準値と前記第1の差とを比較し、前記第1の差が当該基準値よりも大きくなる位置の第1の高さマップのデータを、前記第2の高さマップのデータに置き換え、当該置き換えが複数の前記基準値毎に行われて、第1のセットの複数の高さマップを求めるステップと、
第1のセットの各高さマップにおいて、前記隣接する位置の間のデータ値の差が所定の規定値よりも大きくなる回数が求められ、前記第1のセットから前記回数が最も小さい高さマップが選択されるステップと、
前記第1の高さマップと前記第3の高さマップとの間の第3の差を取るステップと、
前記第3の差を基準とした基準値と前記第1の差とを比較し、前記第1の差が当該基準値よりも大きくなる位置の第1の高さマップのデータを、前記第3の高さマップのデータに置き換え、当該置き換えが複数の前記基準値毎に行われて、第2のセットの複数の高さマップを求めるステップと、
第2のセットの各高さマップにおいて、前記隣接する位置の間のデータ値の差が所定の規定値よりも大きくなる回数が求められ、前記第2のセットから前記回数が最も小さい高さマップが選択されるステップと、
前記第1のセットから選択された高さマップと、前記第2のセットから選択された高さマップのうち、前記フィルタリングされた高さマップとの差が小さい方を選択するステップと、を有する、請求項7に記載の方法。 - 広帯域光源による白色光干渉法を用いて物体表面の高さマップを求める装置であって、
前記物体を位置決めする手段と、
広帯域白色光源と、
参照鏡と、
受けた光を電気信号に変換する光検出器と、
前記広帯域白色光源からの光を対物レンズを通じて前記物体表面および前記参照鏡に向け、かつ前記参照鏡に反射した光および前記物体表面に反射した光を前記光検出器に向ける光学的手段と、
前記物体に対し対物レンズの焦点面を走査する走査手段と、
前記走査手段を制御して走査動作を実施し、かつ前記光検出器からの信号を受信し処理する処理装置と、を有し、
前記処理装置は、
前記物体表面上の各位置の高さを求めるステップにおいて、
白色光干渉法を用いて、前記物体に対し対物レンズの焦点面を高さ方向に走査して干渉パターンの強度信号を得るステップと、
前記物体表面上の各位置について前記強度信号の振幅が最大となる前記高さ方向の位置を推定して、当該高さ方向の位置から前記物体表面上の各位置の高さを求めるステップと、を行い、
前記強度信号が最大となる高さ方向の位置を推定するステップにおいて、
前記強度信号をフーリエ変換するステップと、
前記フーリエ変換された信号をフィルタリングしてノイズ信号を取り除くステップと、
前記フィルタリングされた信号を逆フーリエ変換するステップと、
前記逆フーリエ変換された信号の重心の位置を求めて、当該重心の位置を前記高さ方向の位置とするステップと、を行い、
前記処理装置は、
前記強度信号の位相を示す位相信号を求めるステップと、
前記重心の位置に最も近い前記位相信号のゼロ交差の位置から前記物体表面上の各位置の高さを求めるステップと、
前記ゼロ交差に対する2πn交差と−2πn交差(nは整数)の位置から前記物体表面上の各位置の高さを求めるステップと、をさらに行う、装置。 - 前記処理装置は、
前記強度信号の位相を示す位相信号を求めるステップにおいて、
前記強度信号をフーリエ変換するステップと、
前記フーリエ変換された信号を、予め定められた周波数範囲外にある全ての周波数を排除しかつ前記範囲内の周波数を関数によって重み付けするように適合されたフィルタにかけるステップと、
このフィルタリングされた信号を逆フーリエ変換するステップと、
前記逆フーリエ変換された信号から位相信号を計算するステップと、を行う、請求項9に記載の装置。 - 前記処理装置は、
前記強度信号の位相を示す位相信号を求めるステップにおいて、
複素ウェーブレットを選択するステップと、
前記強度信号に対し、前記重心の位置近くのウェーブレット変換を行うステップと、
このウェーブレット変換が行われた信号から位相信号を計算するステップと、を行う、請求項9に記載の装置。 - 前記処理装置は、
前記ゼロ交差の位置から求められた前記物体表面の各位置の高さから、第1の高さマップを求めるステップと、
前記2πn交差および−2πn交差の位置から求められた前記物体表面の各位置の高さから、第2および第3の高さマップを求めるステップと、
コヒーレンス法による前記重心の位置から求められた前記物体表面の各位置の高さから、高さマップを求めるステップと、
前記第1の高さマップの一部を前記第2の高さマップと組み合わせて、ジャンプが最小数の高さマップを求めるステップと、
前記第1の高さマップの一部を前記第3の高さマップと組み合わせて、ジャンプが最小数の高さマップを求めるステップと、
前記組み合せられた高さマップから、コヒーレンス法を用いて求められた前記高さマップに近い高さマップを選択するステップと、を行う、請求項9〜11のいずれかに記載の装置。 - 前記処理装置は、
前記コヒーレンス法を用いて求められた前記高さマップをフィルタリングして雑音を低減するステップと、
前記フィルタリングされた前記高さマップと前記第1の高さマップとの間の第1の差を取るステップと
前記第1の高さマップと前記第2の高さマップとの間の第2の差を取るステップと、
前記第2の差を基準とした基準値と前記第1の差とを比較し、前記第1の差が当該基準値よりも大きくなる位置の第1の高さマップのデータを、前記第2の高さマップのデータに置き換え、当該置き換えが複数の前記基準値毎に行われて、第1のセットの複数の高さマップを求めるステップと、
第1のセットの各高さマップにおいて、前記隣接する位置の間のデータ値の差が所定の規定値よりも大きくなる回数が求められ、前記第1のセットから前記回数が最も小さい高さマップが選択されるステップと、
前記第1の高さマップと前記第3の高さマップとの間の第3の差を取るステップと、
前記第3の差を基準とした基準値と前記第1の差とを比較し、前記第1の差が当該基準値よりも大きくなる位置の第1の高さマップのデータを、前記第3の高さマップのデータに置き換え、当該置き換えが複数の前記基準値毎に行われて、第2のセットの複数の高さマップを求めるステップと、
第2のセットの各高さマップにおいて、前記隣接する位置の間のデータ値の差が所定の規定値よりも大きくなる回数が求められ、前記第2のセットから前記回数が最も小さい高さマップが選択されるステップと、
前記第1のセットから選択された高さマップと、前記第2のセットから選択された高さマップのうち、前記フィルタリングされた高さマップとの差が小さい方を選択するステップと、を行う、請求項12に記載の装置。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP09173518.3A EP2314982B1 (en) | 2009-10-20 | 2009-10-20 | Method and apparatus for determining the height of a number of spatial positions on a sample defining a profile of a surface through white light interferometry |
| EP09173518.3 | 2009-10-20 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2011089988A JP2011089988A (ja) | 2011-05-06 |
| JP5554681B2 true JP5554681B2 (ja) | 2014-07-23 |
Family
ID=41682804
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010235715A Active JP5554681B2 (ja) | 2009-10-20 | 2010-10-20 | 物体表面の高さマップを求める方法及びその装置 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US8553231B2 (ja) |
| EP (1) | EP2314982B1 (ja) |
| JP (1) | JP5554681B2 (ja) |
Families Citing this family (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8804129B2 (en) | 2011-01-26 | 2014-08-12 | Mitutoyo Corporation | Method and apparatus for performing film thickness measurements using white light scanning interferometry |
| EP2677271B1 (en) * | 2012-06-18 | 2017-04-26 | Mitutoyo Corporation | Broadband interferometer for determining a property of a thin film |
| WO2014133455A1 (en) * | 2013-02-28 | 2014-09-04 | Heptagon Micro Optics Pte. Ltd. | Measurement of focal points and other features in optical systems |
| DE102013016368B4 (de) | 2013-09-30 | 2024-05-16 | Carl Zeiss Microscopy Gmbh | Lichtmikroskop und Mikroskopieverfahren zum Untersuchen einer mikroskopischen Probe |
| US10073025B2 (en) | 2014-03-24 | 2018-09-11 | Colorado State University Research Foundation | Method and device for incoherent imaging with coherent diffractive reconstruction |
| US10005999B2 (en) | 2015-03-18 | 2018-06-26 | Battelle Memorial Institute | Method and apparatus for measuring biofilm thickness and topology |
| CN107990982B (zh) * | 2017-09-25 | 2019-11-22 | 上海卫星工程研究所 | 傅里叶变换光谱仪光谱计算中的相位校正方法 |
| CN110009642B (zh) * | 2019-03-14 | 2021-03-26 | 华中科技大学 | 基于白光干涉测量的三维图像噪声区域重建方法及系统 |
| US11442021B2 (en) * | 2019-10-11 | 2022-09-13 | Kla Corporation | Broadband light interferometry for focal-map generation in photomask inspection |
| US12360058B2 (en) * | 2020-12-21 | 2025-07-15 | Kla Corporation | Integration of an optical height sensor in mask inspection tools |
| EP4585880A1 (en) | 2024-01-11 | 2025-07-16 | Mitutoyo Corporation | Method for determining a height map using a white light interferometer and white light interferometer for the same |
Family Cites Families (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB9213159D0 (en) * | 1992-06-22 | 1992-08-05 | British Tech Group | Method of and apparatus for interferometrically inspecting a surface of an object |
| US5398113A (en) * | 1993-02-08 | 1995-03-14 | Zygo Corporation | Method and apparatus for surface topography measurement by spatial-frequency analysis of interferograms |
| US5633715A (en) | 1994-05-20 | 1997-05-27 | Wyko Corporation | Centroid approach for estimating modulation peak in broad-bandwidth interferometry |
| AU2002241784A1 (en) | 2000-11-02 | 2002-05-27 | Zygo Corporation | Height scanning interferometry method and apparatus including phase gap analysis |
| US6493093B2 (en) | 2001-04-12 | 2002-12-10 | Veeco Instruments Inc. | Bat-wing attenuation in white-light interferometry |
| US7283250B2 (en) * | 2004-01-16 | 2007-10-16 | Veeco Instruments, Inc. | Measurement of object deformation with optical profiler |
| JP2005283155A (ja) * | 2004-03-26 | 2005-10-13 | Shimizu Kimiya | 光干渉断層像撮像法における分散補正装置 |
| TWI278598B (en) * | 2004-12-22 | 2007-04-11 | Univ Electro Communications | 3D shape measurement device |
| JP2007033216A (ja) * | 2005-07-26 | 2007-02-08 | Keyence Corp | 白色干渉計測装置及び白色干渉計測方法 |
| WO2007033851A1 (de) * | 2005-09-22 | 2007-03-29 | Robert Bosch Gmbh | Interferometrische schichtdickenbestimmung |
| JP2007147505A (ja) * | 2005-11-29 | 2007-06-14 | Chroma Ate Inc | 表面形状測定方法及びその測定装置 |
| JP5544679B2 (ja) * | 2007-08-20 | 2014-07-09 | 富士通株式会社 | 段差表面形状の計測方法および計測装置 |
| US7649634B2 (en) * | 2007-10-30 | 2010-01-19 | Mountain View Optical Consultant Corp. | Methods and systems for white light interferometry and characterization of films |
| JP4756024B2 (ja) * | 2007-11-12 | 2011-08-24 | アンリツ株式会社 | 三次元形状測定装置 |
-
2009
- 2009-10-20 EP EP09173518.3A patent/EP2314982B1/en active Active
-
2010
- 2010-10-20 US US12/908,357 patent/US8553231B2/en active Active
- 2010-10-20 JP JP2010235715A patent/JP5554681B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2011089988A (ja) | 2011-05-06 |
| EP2314982B1 (en) | 2020-12-02 |
| EP2314982A1 (en) | 2011-04-27 |
| US8553231B2 (en) | 2013-10-08 |
| US20110090511A1 (en) | 2011-04-21 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5554681B2 (ja) | 物体表面の高さマップを求める方法及びその装置 | |
| US7440115B2 (en) | System and methods for wavefront measurement | |
| US8319975B2 (en) | Methods and apparatus for wavefront manipulations and improved 3-D measurements | |
| JP4279550B2 (ja) | 位相間隙分析を含む高さ走査干渉分析方法および装置 | |
| AU2002362137B2 (en) | Systems and methods for wavefront measurement | |
| CN110779464B (zh) | 一种时域频域联合分析宽光谱相干测量方法及系统 | |
| US7978403B2 (en) | Imaging interferometric microscopy | |
| US6493093B2 (en) | Bat-wing attenuation in white-light interferometry | |
| US20100188400A1 (en) | Method for simultaneous hue phase-shifting and system for 3-d surface profilometry using the same | |
| JP6207250B2 (ja) | サンプルの性状を測定する方法及び装置 | |
| CN101449590B (zh) | 用于去除光学断面图像线条的系统和方法 | |
| US8780334B1 (en) | Topographical profiling with coherence scanning interferometry | |
| JP2023533767A (ja) | デジタルホログラム再構成システム及び方法 | |
| JP2019537726A (ja) | 干渉計の光学性能を最適化するための方法及び装置 | |
| JP4756024B2 (ja) | 三次元形状測定装置 | |
| Tay et al. | Demodulation of a single interferogram based on continuous wavelet transform and phase derivative | |
| US7115848B1 (en) | Methods, systems and computer program products for calibration of microscopy imaging devices | |
| JP4357360B2 (ja) | 表面形状測定方法及び表面形状測定装置 | |
| CN1952594B (zh) | 形貌测量方法及其测量装置 | |
| JP5413072B2 (ja) | 波形解析装置、波形測定装置、波形解析プログラム、干渉計装置、パターン投影形状測定装置、及び波形解析方法 | |
| JP2006250853A (ja) | 物体表面形状測定方法及びその装置 | |
| JP2018009856A (ja) | 波面計測方法、波面計測装置、プログラムおよび記録媒体 | |
| JP3693767B2 (ja) | 形状測定器 | |
| KR102093885B1 (ko) | 측정 대상 물체의 3차원 형상 정보 생성 장치 | |
| US7956630B1 (en) | Real-time effective-wavelength error correction for HDVSI |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20130903 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140212 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20140212 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140414 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20140501 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20140529 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5554681 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |